1. Introduction
With the increasing use of unmanned underwater vehicles (UUVs), the issue of underwater radiated noise has gained significant attention. At the same time, advances in computer technology have made numerical algorithms the primary approach for studying the acoustic radiation of complex underwater vibrating bodies. Currently, the most widely used methods are the Finite Element Method (FEM) [
1] and the Boundary Element Method (BEM) [
2]. The FEM requires discretizing the entire solution domain, which is usually limited to sound field calculations in finite domains. In contrast, the BEM reduces the dimensionality of the analysis and is more suitable for sound field calculations in infinite domains, offering advantages over the FEM [
3]. However, the BEM has issues with handling singular integrals, which not only increase computational difficulty but also, if handled improperly, can affect the accuracy of the results [
4].
To address this, Koopmann et al. proposed the Wave Superposition Method (WSM) [
5], which is based on the idea of fitting the radiated acoustic field of a real source by superimposing the acoustic fields generated by a series of virtual equivalent sources, thus achieving sound field reconstruction and prediction. To improve efficiency, the unit integrals in the WSM are usually simplified to monopole point sources, which is known as the Equivalent Source Method (ESM) [
6]. Compared with the BEM method, the ESM method has several advantages. First, ESM is a meshless method, utilizing simple point sources both inside and outside the surface. Second, it avoids numerical singularity, as the distance between the equivalent source points and the matching points is never zero. Third, the number of equivalent sources does not necessarily have to match the number of matching points, providing flexibility in balancing accuracy and computation time. By reducing the number of equivalent sources, the size of the linear system and computation time can be significantly reduced. Dunn et al. [
7] proposed guidelines on selecting the number and position of equivalent sources, recommending a value of approximately
, where
is the reference wave number, and
represents the scattering surface area. Additionally, the ESM has been applied to inverse reconstruction problems to determine the geometry of actual noise sources or radiators [
8,
9].
To accommodate structures of arbitrary shapes and improve computational stability, equivalent sources are typically arranged uniformly on a closed virtual boundary that conforms to the actual boundary. Jeans et al. [
10,
11] pointed out that the use of a smooth closed surface as the configuration region for the virtual sources leads to non-unique solutions for the sound field at the characteristic frequencies of the corresponding problem on the virtual surface. Ochmann et al. [
12] discussed that the non-uniqueness issue can be avoided by using layered or multi-point methods because the equivalent sources do not enclose the internal space. This can be achieved by positioning the equivalent sources along straight lines or selecting non-enclosed surfaces. Lu Jing et al. [
13,
14] proposed a complex radius vector wave superposition method, which only requires adding a small amount of complex virtual damping to the position radius vector of the virtual surface to obtain the unique solution in the entire frequency domain. However, subsequent research revealed significant limitations of this method, as it is only applicable to relatively regular and smooth boundary shapes. For boundaries of arbitrary shapes, this method imposes strict requirements on the selection of damping coefficients and may even face the risk of failure.
In computational methods for far-field sound propagation, omnidirectional point sources are typically assumed, such as ray tracing [
15,
16], fast field programs [
17,
18], and the parabolic equation method [
19,
20]. This assumption does not necessarily limit the application, as more complex sound sources can be represented by the spatial distribution of omnidirectional point sound sources. However, in many practical cases, due to the complexity of the sound sources, the sound source or its analytical expression as a point source is unknown. For example, UUVs or aircraft. These sources exhibit directional radiation, and the challenge in calculating far-field sound propagation for such sound sources lies in how to specify these directional sources in numerical propagation algorithms. For the far-field sound propagation problem of directional volume sources, Vecherin et al. [
21,
22] associated spherical harmonic functions with specific compact elementary source configurations, reproducing the given directional radiation patterns in the far field. They also discussed the impact of outliers and data incompleteness on this method through the study of actual aircraft-radiated noise. Compared with the traditional ESM, this method does not require the equivalent sources to be uniformly distributed on the actual boundary, conforming to the closed virtual boundary. Therefore, this method requires only a small number of equivalent sources and can be applied to more complex models. This method has been cited or directly applied in sound field calculations by some researchers, yielding good results [
23,
24,
25]. However, this method has a degree of blindness when selecting elementary source configurations, and to achieve better results, a larger number of elementary source configurations are usually used.
Therefore, this paper introduces a method for selecting elementary source configurations of equivalent sources by introducing correlation coefficients, aiming to achieve better results with fewer elementary source configurations, and applies this method to the reconstruction of the propeller radiated noise from a UUV. First, the reconstruction of a constructed directivity function is performed to explore the general principles for selecting elementary source configurations. By introducing correlation coefficients, it is concluded that the elementary source configurations should be selected based on their strong correlation with the directivity function. Then, this method is applied to the reconstruction of the propeller radiation noise from a UUV in actual tests. Through both narrow and wide-angle reconstructions, the method is verified to achieve higher accuracy in reconstructing complex radiated sound sources using fewer elementary point source configurations. The structure of the paper is as follows: The structure of this paper is as follows:
Section 2 introduces the equivalent source method used in this paper;
Section 3 discusses the method for selecting elementary point source configurations.
Section 4 provides a detailed explanation of the application of this method in the reconstruction of UUV propeller-radiated noise. Finally,
Section 5 summarizes the research findings and suggests potential directions for future studies.
2. Equivalent Source Method
The methods for modeling directional sound sources in the far-field are described in detail in References [
21,
22]. This chapter provides a brief overview of this method.
2.1. Modeling Directional Sound Sources with ESM
A far-field radiation pattern in free space is represented by a directivity function
, which is defined by the following equation:
where
represents the complex acoustic pressure;
is the three-dimensional spatial vector that defines the position of the observation point. The directivity function
dependent on the spherical angles
;
is the wave number, and the magnitude of the spatial vector is
. Equation (1), as an approximate solution to the Helmholtz equation, is valid in the far field for any complex sound sources located near the origin. More precisely, the far-field condition that the observation point
must satisfy is:
, where
is the wavelength, and
is the maximum distance from the origin to any point of the source. For a point source that radiates omnidirectionally with amplitude
, the directivity function becomes
, and Equation (1) becomes an exact solution to the Helmholtz equation. ESM aims to reconstruct an equivalent distribution of compact point sources, determining their numbers, amplitudes, and locations so that they produce a given directivity function (the compactness condition:
).
ESM consists of three steps. First, the directivity function is decomposed in terms of spherical harmonics:
where
represents the normalized spherical harmonic of order
l and degree
m;
are the associated Legendre polynomials (
). The coefficients
can be easily obtained using the orthonormality property of the spherical harmonics, with the result:
where the asterisk indicates the complex conjugate. In practical applications, the infinite series on
l is limited to some maximal value, ensuring that the original directional function is sufficiently consistent with its series representation defined by Equation (2). Such a criterion can be a normalized root-mean-square error (NRMSE) below a specified threshold. Although the azimuthal angle
in Equation (3) is defined within the range
, it can sometimes be used within the interval
.
Second, each spherical harmonic function can be linked to a specific compact point source configuration, which will be called an elementary source configuration (the elementary source configurations corresponding to the first three orders of spherical harmonic functions are shown in
Table 1). The radiation patterns of these elementary source configurations are equivalent to the corresponding spherical harmonic functions. It is important to note that the elementary source configurations only need to be determined once, after which they can be saved for the reconstruction of new directivity functions.
Third, once the required elementary source configurations are identified, their linear combinations can reconstruct the given directivity function, with the coefficients determined by Equation (3).
2.2. Application to the PE Algorithms
ESM can be applied with any propagation algorithm, including Parabolic Equations (PEs). However, when dealing with point sources moving horizontally from the origin, its application becomes more complex, as it requires defining separate PE initial fields at their horizontal coordinates and conducting individual PE calculations. To address this, we focus on two-dimensional PEs. By fixing
, we select a specific plane
, where
r represents the horizontal distance, and
z is the vertical distance. In Equation (1),
and the directivity function in free space
depends solely on the angle
, allowing it to be represented using the vertical source configuration. This allows the sound field for different
values to be considered separately. It is important to note that the source configurations may vary for different values of
. For a point source moving horizontally from the origin, a method for converting the horizontal source configurations into vertical ones is described in Reference [
21].
In the case when , in the vicinity of , the function can be decomposed into a series of even-powered cosines with arbitrary accuracy. The precision required for the narrow-angle PE is obtained by decomposing as: . The precision required for the wide-angle PE is obtained by decomposing as: .
The
-angle range and applicable scenarios for narrow-angle PE and wide-angle PE are listed in
Table 2.
For example, the directivity function of a horizontal dipole aligned with the x-axis can be simulated using three vertically arranged point sources with narrow-angle PE or five sources for vertically arranged point sources with wide-angle PE.
In principle, any desired source directivity can be represented as a superposition of vertically oriented elementary source configurations. By determining the number of these source configurations and their corresponding coefficients as needed, the given directivity function can be reproduced with sufficient accuracy within the specified -range. Although Equation (4) may not be suitable in this case, a solution can be efficiently obtained using a least-squares formulation.
For a fixed-angle
, when there are
N elementary source configurations with directivity functions
, where
, the coefficients
can be found by solving the following matrix equation to match the observed directivity function
:
where
is column vector of unknown coefficients,
;
is a column vector of known data,
. Here,
K represents the number of the
-samples within a specified range
, and
is a matrix constructed from the directivity functions of the elementary source configurations, with elements
,
. Assuming the sampling resolution of
is sufficiently high to provide
, the least-squares solution to Equation (5) is:
yielding the corresponding
. If the agreement between
and
is not satisfactory, the number of the elementary source configurations should be increased,
, and the steps in Equations (5) and (6) need to be repeated. It is important to note that for different values of
, the source configurations may vary, affecting both the coefficients
and even the number
N.
3. Selection of Elementary Source Configurations
In the traditional ESM, the number of equivalent sources required is
, where
is the reference wave number, and
is the scattering surface area [
7]. However, the method proposed in this paper only requires three basic point source configurations for high-precision modeling, which significantly reduces the number of equivalent sources compared with the traditional ESM method. This leads to a substantial reduction in computational load and time. Taking a 1
flat plate as an example,
Table 3 shows a comparison of the number of equivalent sources required by the traditional ESM and the method presented in this paper at three frequencies in air. The method proposed in this paper selects
,
, and
at 1000 Hz;
,
, and
at 1500 Hz; and
,
, and
at 200 Hz.
The selection of elementary source configurations largely determines the accuracy and precision of the reconstruction results. Sometimes, improper selection of elementary source configurations can affect the accuracy and precision of the reconstruction results, even leading to the appearance of several or a large number of outliers in the results. In comparison, three elementary source configurations () are typically sufficient for high-precision modeling of a given simple directivity function. However, in rare cases where the radiation patterns are highly complex or when greater accuracy is needed for large elevation angles, additional elementary configurations may be required. In such cases, the matrix G may become ill-conditioned, and solving Equation (6) could require the use of a pseudo-inverse, which imposes specific requirements on the selection of elementary source configurations.
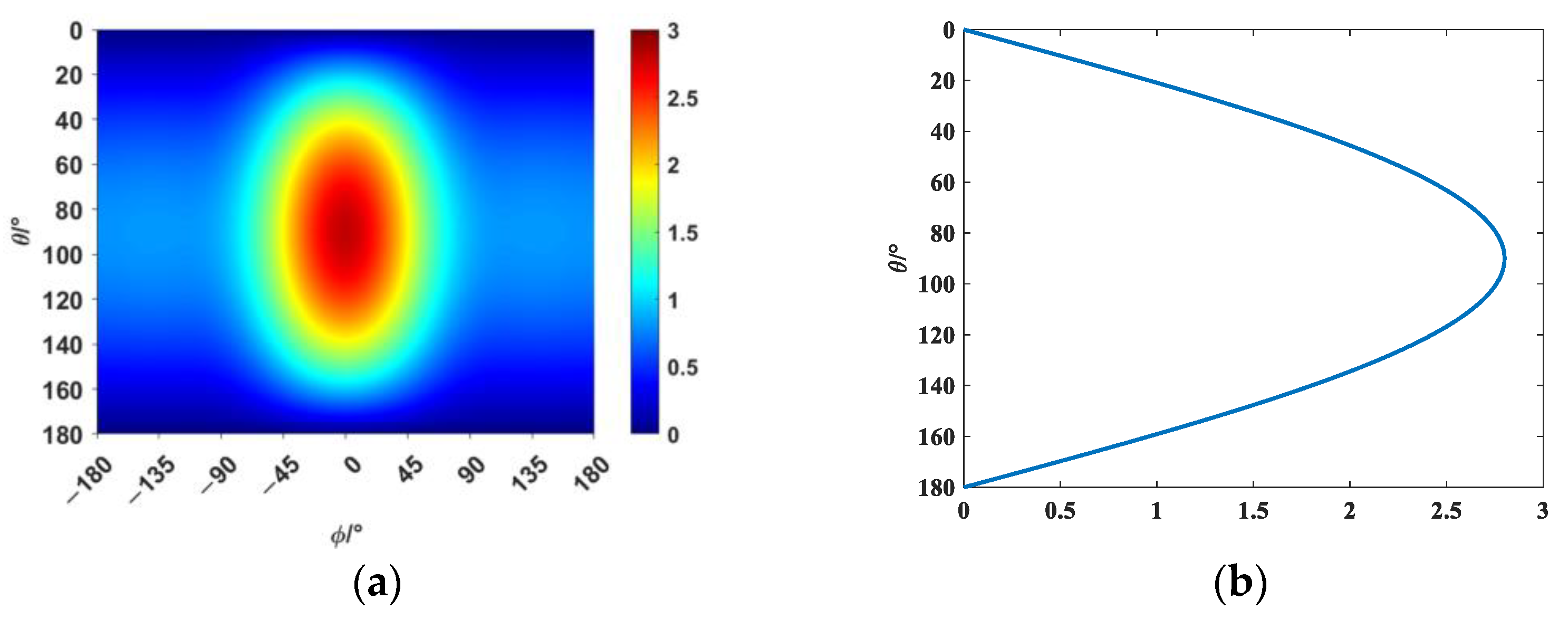
Therefore, this paper explores the general principles for selecting elementary source configurations by reconstructing the following directivity function shown in
Figure 1:
The three combinations formed by the four spherical harmonic functions
,
,
, and
are shown in
Table 4, and the Spearman rank correlation coefficients of these four spherical harmonic functions with the directivity function
D are presented in
Table 5. The explanation of the magnitude of the correlation coefficient is provided in
Table 6.
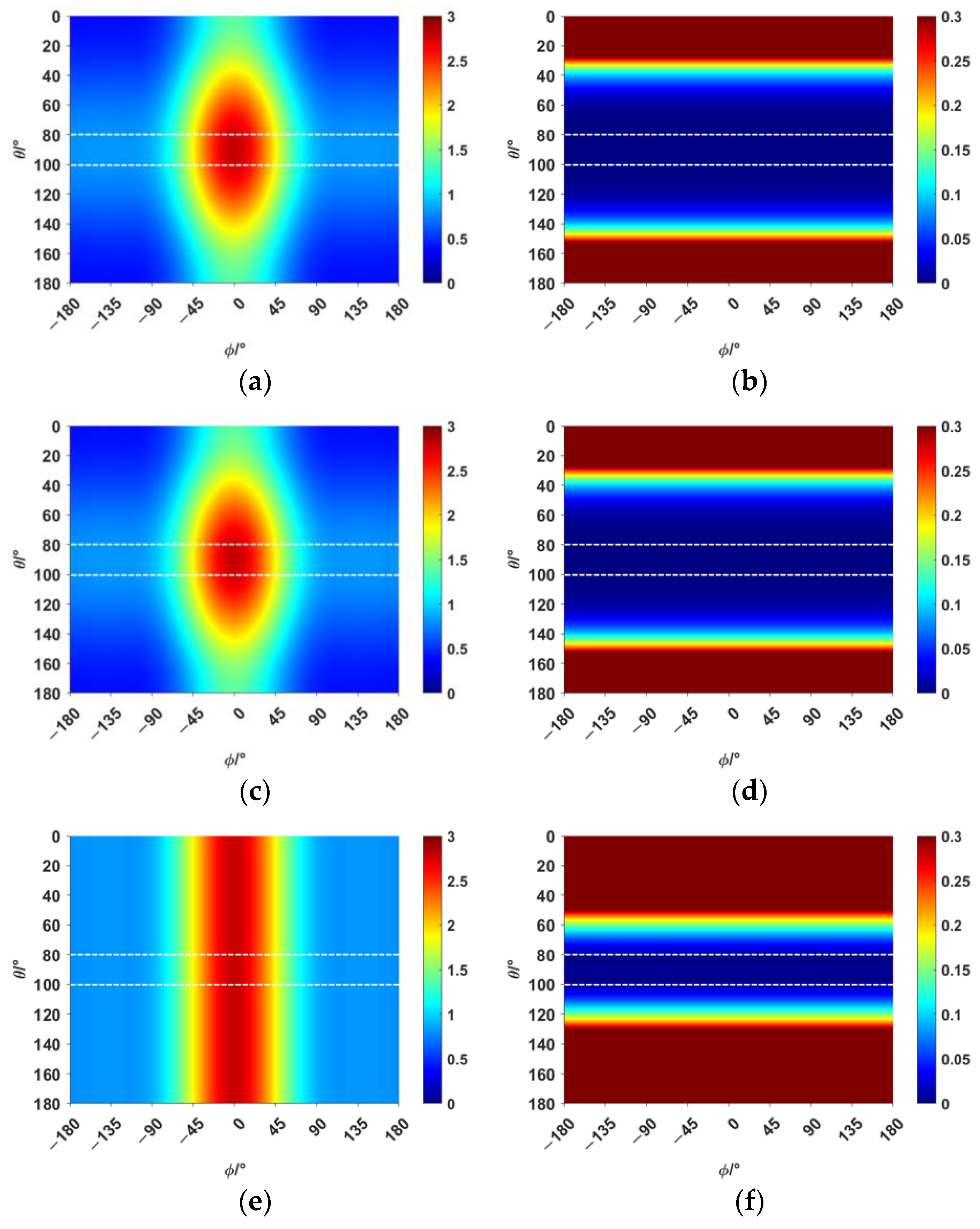
The narrow-angle reconstruction of the directivity function D is performed by Combination 1, Combination 2, and Combination 3, respectively. The results are shown in
Figure 2 (the narrow-angle region is enclosed by dashed lines):
In
Figure 2, the reconstructed results of Combination 1 and Combination 2 show high accuracy and precision, with relatively small errors, both within and outside the narrow-angle region, compared with the original directivity function
D. However, the reconstructed results of Combination 3 exhibit high accuracy only within the narrow-angle region, while the errors outside of the narrow-angle region are significantly larger. The elementary source configuration coefficients of each combination and the comparison of the absolute values before and after reconstruction for each combination are shown in
Table 7. The computation time for each combination is shown in
Table 8.
As shown in
Table 5, the spherical harmonic function
has a strong correlation with the directivity function
D. This characteristic is also reflected in
Table 7. In Combination 1, the dominant contribution comes from the spherical harmonic function
, while the contributions of the other two terms can be neglected. In Combination 2, the spherical harmonic function
alone is sufficient to achieve accuracy and error precision comparable to that of Combination 1. The errors in both Combination 1 and Combination 2 are within 0.1% in the narrow-angle region, which can be considered negligible. When the angle reaches 40°, the maximum error is still within 5%. Combination 3, which lacks the spherical harmonic function
, only achieves high accuracy in the narrow-angle region. The error in this region is within 1%, but the error precision in the narrow-angle region is not as good as in Combination 1 and Combination 2. When the angle reaches 20°, the error exceeds 5%. As shown in
Table 8, selecting the appropriate basic source configuration can reduce the computational load and save time.
Based on the above, it can be concluded that when selecting elementary source configurations, those that exhibit a strong correlation with the directivity function should be prioritized. This approach allows for achieving high accuracy and precision with as few elementary source configurations as possible. If elementary source configurations with no or weak correlation to the directivity function are selected, it not only increases unnecessary computational load but also leads to large errors and even leads to the occurrence of outliers during the least squares solution process.
5. Conclusions
This paper discusses the general principles for selecting elementary source configurations by reconstructing the constructed directivity function. By introducing correlation coefficients, a method for selecting elementary source configurations is proposed, making the selection process no longer blind or repetitive. This method is then applied to the reconstruction of the propeller-radiated noise from a UUV, and the results verify that the method demonstrates good accuracy. The following conclusions are drawn:
When selecting elementary source configurations, those with a strong correlation to the directivity function should be chosen. Selecting elementary source configurations with no or weak correlation not only increases unnecessary computational load but also causes significant errors, even leading to outliers.
The reconstruction of the propeller radiated noise from the UUVs demonstrates that the method has good precision. It can achieve higher reconstruction accuracy with fewer elementary source configurations. The maximum error for narrow angles does not exceed 1%, and the maximum error for wide angles does not exceed 5%. When the wide-angle range is increased by 20°, the reconstruction error of the method does not increase.
The method proposed in this paper is designed for far-field reconstruction. When a larger angular range is required, more basic source configurations are needed, and the reconstruction accuracy decreases. The reconstruction error increases at the peak values in these data. Increasing the number of basic source configurations has little effect on the reconstruction error at the peak, which is an area that needs further improvement in the future.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


