1. Introduction
The increasing complexity of modern signal processing environments has made precise target localization and parameter estimation critical in various applications, including radar systems, wireless communications, and electronic warfare. However, these environments often involve multiple targets and strong interference signals, posing significant challenges to traditional array signal processing techniques [
1,
2]. Current array signal processing methods mainly rely on spatial information collected by array antennas. While classical high-resolution parameter estimation algorithms, such as the MUSIC (Multiple Signal Classification) algorithm and the ESPRIT (Estimation of Signal Parameters via Rotational Invariance Techniques) algorithm, enable accurate target localization and parameter estimation [
3,
4], these methods typically depend on scalar sensors. To improve computational efficiency and enable real-time DOA estimation, phase interferometry-based methods and full-hardware in-phase/quadrature (I/Q)-based angle of arrival (AoA) estimation techniques have been proposed [
5]. Phase interferometry exploits phase differences among received signals to estimate the AoA while reducing computational complexity, making it suitable for real-time applications. This technique provides a compelling alternative to traditional subspace-based algorithms by achieving a trade-off between computational efficiency and estimation accuracy. However, scalar sensors capture only the signal’s spatial characteristics, thereby neglecting its polarization characteristics. This limitation becomes especially critical in modern complex environments, such as multi-target scenarios and strong interference, where methods relying solely on spatial data struggle to effectively distinguish target signals from interference. In order to overcome these limitations, the polarization-sensitive array (PSA) has evolved from the traditional scalar array to spatial polarization information fusion by introducing electromagnetic vector sensors (EMVSs). Unlike scalar arrays, PSAs can simultaneously capture both the directional and polarization characteristics of signals, thus offering a multidimensional perspective in signal analysis. By exploiting polarization differences between target and interference signals, the PSA facilitates more accurate signal separation and interference suppression. Consequently, the PSA proves especially effective in complex environments involving multiple sources and significant interference. This joint processing of spatial and polarization information significantly improves the system’s robustness in complex signal environments [
6,
7,
8,
9,
10].
In response to the limitations of scalar arrays, research on PSAs has recently focused on the joint DOA and polarization parameter estimation technique, which significantly improves the array’s signal processing capability by fusing spatial and polarization information. Zhang investigated a blind DOA and polarization parameter joint estimation algorithm based on dimensionality-reducing MUSIC [
11]. This method improves the estimation accuracy under irregular arrays by reducing the complexity of multidimensional search and performs well in complex environments. However, its performance degrades significantly under mutual coupling effects, as it does not include explicit coupling mitigation. In [
12], Shuai proposed a quaternion MUSIC algorithm based on vector MISC (maximum inter-element spacing constraint) arrays, which further optimizes the precision and computational performance in estimating multidimensional parameters. This algorithm requires a large array aperture, increasing hardware complexity. To achieve comprehensive estimation of four-dimensional (4-D) parameters, Lan proposed an innovative approach by replacing traditional crossed dipoles with tripoles to construct a linear tripole array. This array exhibits high degrees of freedom, enabling the accurate acquisition of two-dimensional (2-D) DOA and polarization information [
13]. Furthermore, Lan developed an optimized MUSIC approach based on linear triplet arrays to overcome the challenge of intensive resource usage in high-dimensional computations. By decomposing the 4-D DOA and polarization estimation into two independent 2-D analyses, this method notably reduces computational effort while enhancing signal resolution [
14]. Nevertheless, the tripole array inherently suffers from severe mutual coupling effects, as three closely positioned orthogonal dipoles within each sensor element introduce strong internal interactions, which can significantly degrade estimation accuracy in practical applications. This internal coupling necessitates complex calibration techniques and increases computational burden, particularly in high-source-density scenarios. In addition, Dai et al. proposed an innovative method by introducing element rotation in linear dipole arrays (LDAs), significantly enhancing their 2-D DOA and polarization estimation capabilities [
15]. By optimizing element orientations, this method improves estimation accuracy and resolution. But, the need for the precise mechanical control of element rotation increases complexity, posing challenges for practical implementation. Meanwhile, a new method based on a single polarization vector sensor was proposed in [
16], which simplifies the hardware design without relying on large arrays while achieving highly accurate DOA and polarization parameter estimation. The sensitivity of this method to noise and mutual coupling effects reduces its robustness in practical applications.
Although these parameter estimation algorithms mentioned above perform well in simulations and controlled environments, in practical works, their performance is affected by various non-ideal factors, such as amplitude and phase errors, non-ideal noise, and mutual coupling effects. As EMVSs in polarization-sensitive arrays usually consist of multiple dipoles co-located at the same spatial coordinates, they inevitably experience mutual coupling during signal reception. Such coupling arises not only among the dipoles themselves but also between neighboring array elements [
17]. This distortion critically impacts the estimation accuracy of DOA and polarization parameters, leading to significant performance degradation in practical applications [
18]. Mutual coupling effects cannot be eliminated, and although complex electromagnetic isolation in hardware can significantly reduce mutual coupling, this will make the hardware cost increase [
19]. In order to address the effect of the mutual coupling effect on the DOA estimation performance, some researchers have adopted special antenna arrangements: Wong in the reference [
20] separated six closely arranged antennas of EMVSs into spatially non-collocated antennas, thereby enabling precise geometric layout and vector processing to capture the target signals’ spatial information. One approach is based on subarray selection and mutual coupling matrix estimation, which can improve the accuracy of DOA estimation to some extent [
21]. Recent studies have explored linear techniques for artifacts correction and compensation in AoA estimation. Florio et al. [
22] introduced an
-matrix-based linear compensation approach that embeds systematic error corrections and first-order mutual coupling compensation into a precomputed correction matrix. This approach is computationally efficient and has been experimentally validated to significantly reduce estimation errors in phase interferometric AoA estimation. Furthermore, reference [
23] proposed a parallel synthetic coprime polarization-sensitive array (PSC-PSA) that leverages a non-collocated design and compressed sensing for joint DOA and polarization estimation. This approach effectively enhances estimation accuracy by expanding the array aperture and reducing mutual coupling effects, making it suitable for complex signal environments. Although existing methods have made significant progress in mutual coupling correction, they require high computational resources; therefore, accurately estimating DOA and polarization parameters while maintaining simplified hardware remains a critical research challenge. This challenge becomes more complex when mutual coupling effects are considered. To address these challenges, this paper proposes an innovative method for DOA and polarization parameter estimation under the influence of mutual coupling effects. A new non-collocated polarization-sensitive array model is utilized to mitigate mutual coupling interference [
24,
25]. In addition, an improved-ESPRIT algorithm is developed to achieve decoupling by combining subarray selection methods to eliminate the effect of the MCM on parameter estimation. The main contributions of this paper are summarized as follows:
- (1)
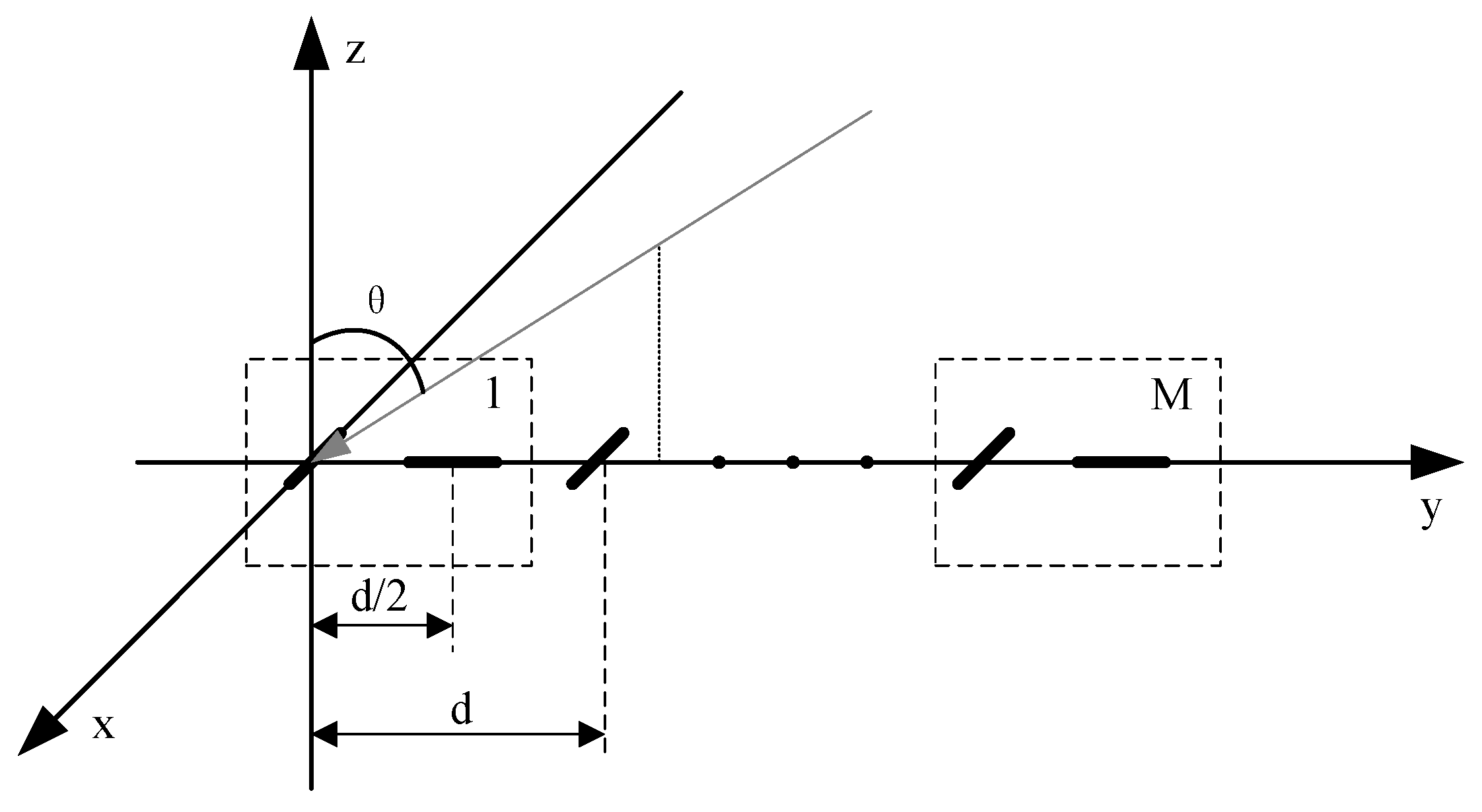
The non-collocated polarization array model is further refined. Although prior works have attempted to apply similar models, the focus here is on mitigating mutual coupling between dipoles within the EMVS (i.e., inter-polarization coupling, IPC) and reducing coupling among neighboring array elements (i.e., inter-elemental coupling, IEC) via a uniform linear array configuration. Moreover, the proposed model greatly enlarges the array’s effective aperture, lowers hardware expenses, and achieves a more stable parameter estimation in complex mutual coupling environments.
- (2)
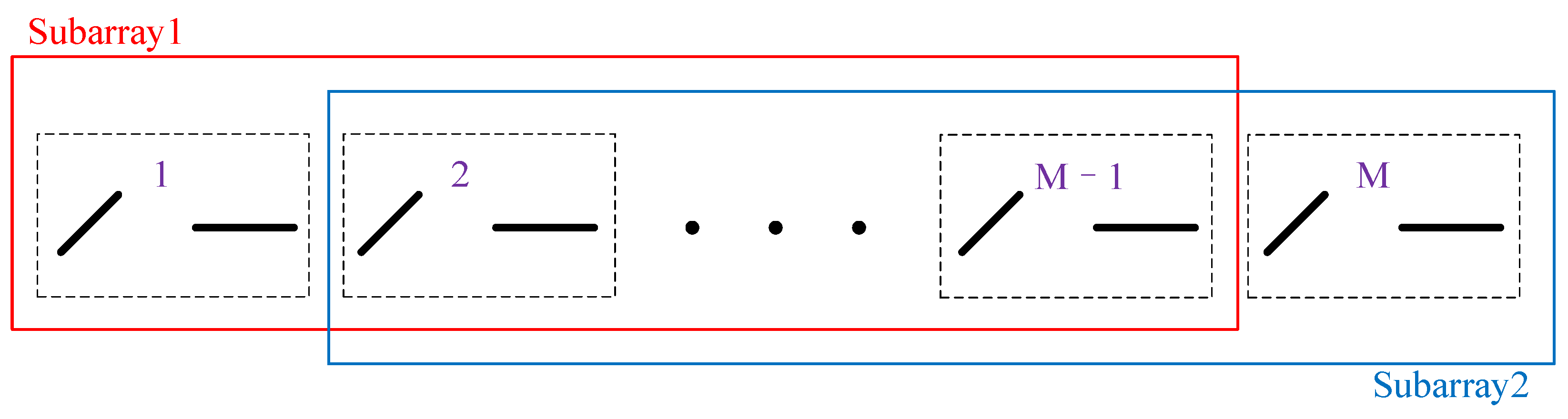
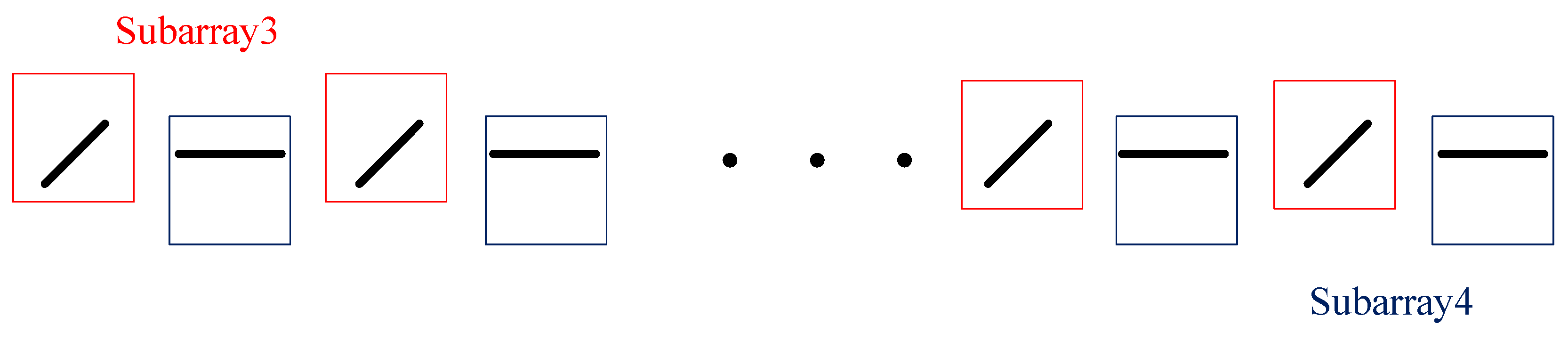
We propose an improved ESPRIT algorithm. The proposed algorithm first decouples the MCM using a novel subarray selection strategy and subsequently performs parameter matching, effectively eliminating the impact of mutual coupling on parameter estimation. In addition, the algorithm does not need to rely on the a priori knowledge of MCM, which makes it more robust and easy to implement in practical applications. Compared with the traditional algorithms, the improvement significantly enhances the accuracy and stability of parameter estimation under strong mutual coupling conditions.
- (3)
The proposed algorithm notably reduces the overall computational complexity through a non-collocated array design and simplified subarray selection strategy. Unlike traditional algorithms that rely on complex EMVS designs with multiple co-located dipoles and high-dimensional optimization, the proposed method reduces mutual coupling interference and achieves high-precision joint parameter estimation within a low-complexity framework.
This paper is structured as follows. The signal model of the non-collocated polarized array and the effects of mutual coupling on the array dipoles, including the mutual coupling matrix, are presented in
Section 2. The detailed procedure of the proposed algorithm is presented in
Section 3. In
Section 4, the experimental simulation results and discussion of the algorithm are provided.
Section 5 presents the conclusion of this work.
4. Simulation Results and Discussion
This section presents three experiments to evaluate the effectiveness and performance of the proposed method. The root mean square error (RMSE) is employed to assess the accuracy of the algorithm’s parameter estimation as follows:
where
L stands for the count of Monte Carlo experimental simulations,
denotes the estimated DOA or polarization values of the
kth signal in the
kth Monte Carlo simulation experiment, and
denotes the real DOA or polarization values of the
kth signal.
The simulation study assumes that a PSA consists of groups of elements, with each group comprising two mutually orthogonal and non-collocated elements, arranged in a ULA configuration. The distance between neighboring elements is set to . The vector of mutual coupling coefficients between the elements is set to in all simulations.
4.1. Algorithm Effectiveness
In the first experiment, we verify the effectiveness of the proposed algorithm and compare its performance with the conventional undecoupled ESPRIT algorithm and reduced-dimension MUSIC (RD-MUSIC) algorithm for the estimation of the angle
. A far-field narrowband signal is assumed to be incident on the array, with the signal parameters set as
,
, and
. The number of snapshots is
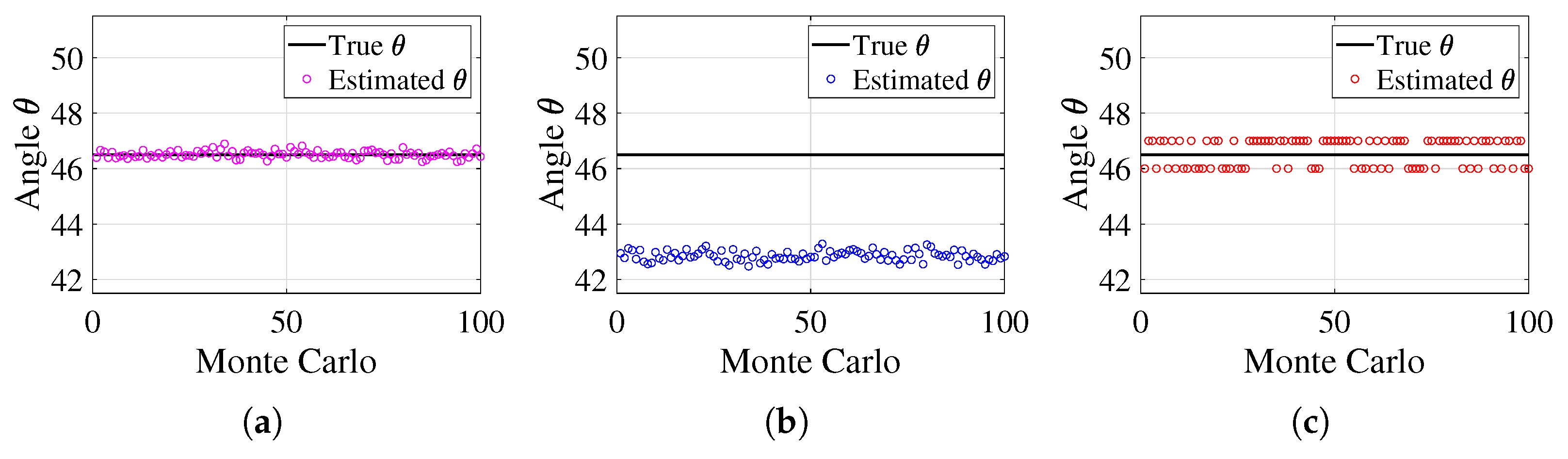
, and the signal-to-noise ratio (SNR) is 10 dB. The effectiveness of the three algorithms in estimating the parameter
is illustrated in
Figure 7.
Figure 7 illustrates the estimation performance of the three algorithms for the angle
. The black solid line represents the true value of
, while the three color markers indicate the estimated values across multiple Monte Carlo simulations. The proposed method exhibits highly stable estimates that fluctuate only slightly around the true value, demonstrating minimal deviation and strong robustness against both noise and mutual coupling effects. In contrast, the ESPRIT algorithm suffers from significant estimation errors, with values noticeably deviating from the true line, indicating poor accuracy and a lack of robustness to these interferences. The RD-MUSIC algorithm performs better than ESPRIT but still exhibits a larger deviation from the true value compared to the proposed method, showing reduced estimation accuracy due to its sensitivity to mutual coupling.
These results confirm that the proposed method achieves the highest accuracy and stability among the three approaches, as its estimates consistently cluster around the true value. In contrast, ESPRIT suffers from severe deviations, making it highly susceptible to noise and mutual coupling effects, while RD-MUSIC, despite improvements over ESPRIT, still demonstrates greater estimation errors than the proposed method.
4.2. Effect of Mutual Coupling Coefficients on Estimation
This section analyzes the effect of the mutual coupling coefficients’ magnitude on parameter estimation and compares it with the conventional undecoupled ESPRIT algorithm and RD-MUSIC algorithm. Assume one far-field narrowband signal incident on the array with DOA
and polarization parameters
,
. The SNR is fixed at 10 dB and the snapshot number
. Varying the magnitude of the mutual coupling coefficients
and
from 0 to 1, 1000 Monte Carlo experiments are conducted to compare and observe the RMSE. The comparison of the RMSE of the mutual coupling coefficients magnitude for the theta estimation of the three methods is shown in
Figure 8, and the comparison of the RMSE of the magnitude of the mutual coupling coefficients for the gamma estimation and the eta estimation is shown in
Figure 9.
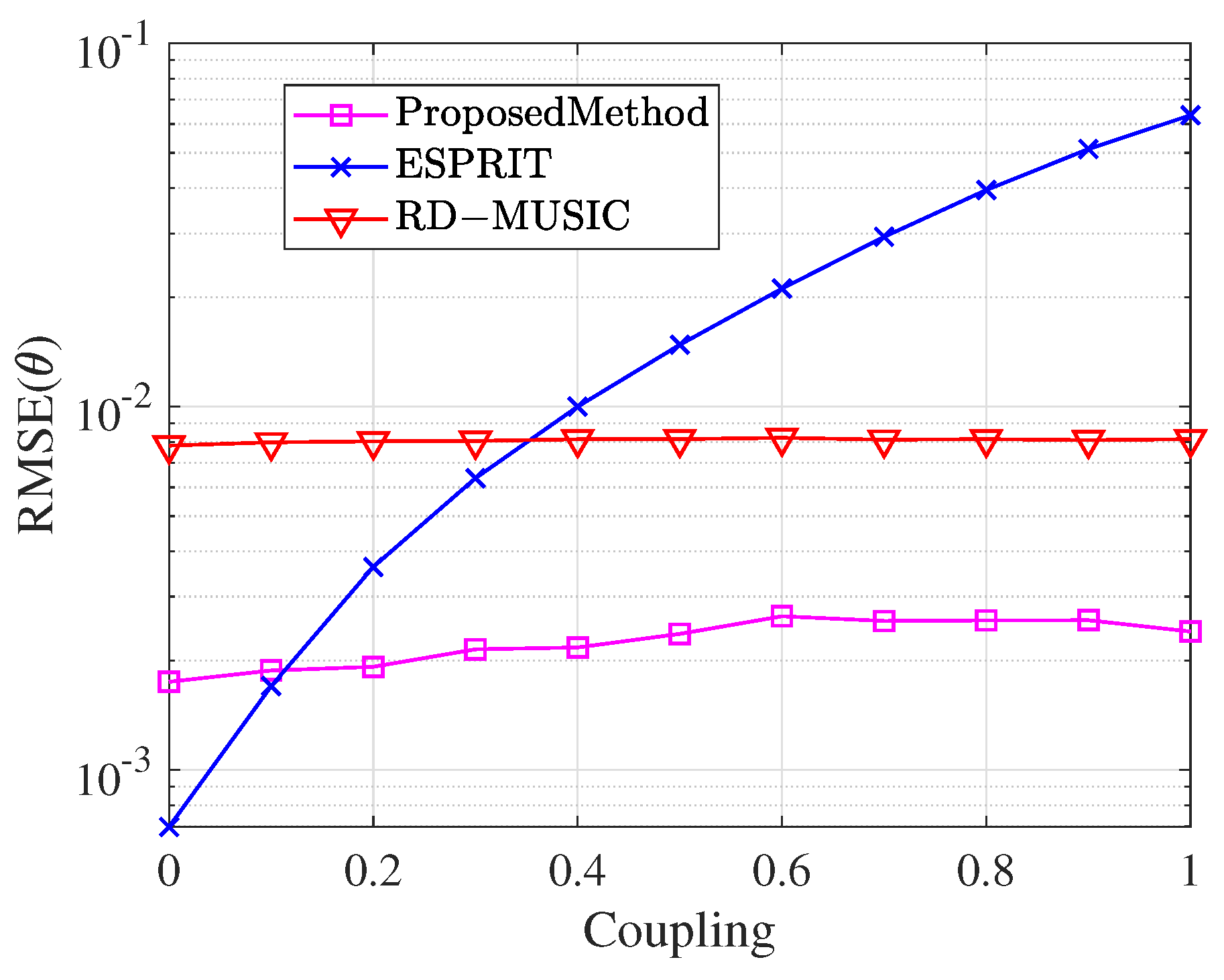
Figure 8 illustrates the variation in the RMSE of DOA parameter
estimation across different algorithms as the magnitude of the mutual coupling coefficient increases from 0 to 1. The proposed algorithm maintains consistently low RMSE values throughout the entire range of mutual coupling coefficients. In contrast, the RMSE of the conventional undecoupled ESPRIT algorithm increases rapidly with the mutual coupling coefficient. This demonstrates its inability to handle high mutual coupling scenarios effectively, resulting in inaccurate parameter estimation. Meanwhile, the RD-MUSIC algorithm consistently shows lower estimation accuracy compared to the proposed method. Note that when the mutual coupling coefficient is very small, the undecoupled algorithm slightly outperforms the proposed method. This occurs because the undecoupled algorithm utilizes more array elements and, in low-coupling scenarios, the element count has a larger influence on estimation accuracy. However, the proposed algorithm achieves effective decoupling processing by sacrificing a portion of the array elements. As the mutual coupling coefficients increase, it substantially outperforms the undecoupled algorithm, maintaining lower estimation error and demonstrating superior stability and robustness.
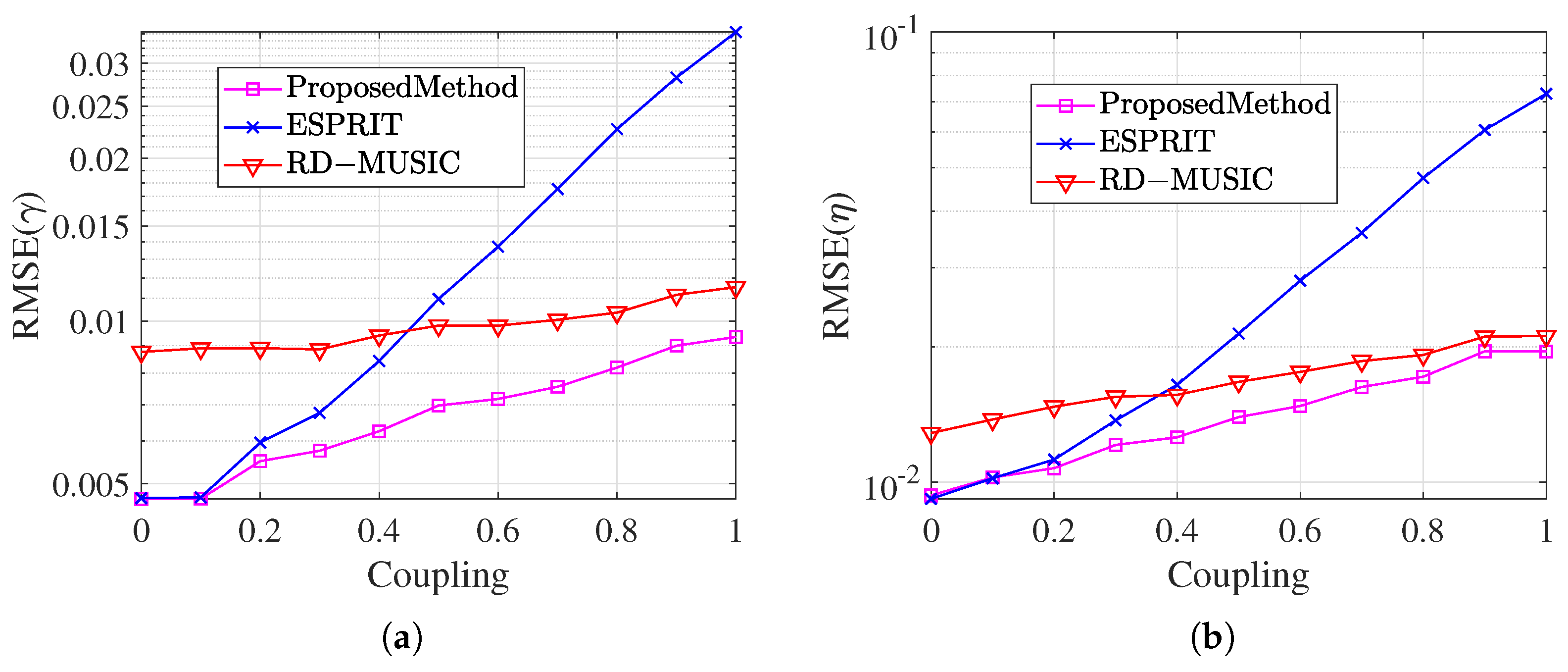
In
Figure 9, the estimated RMSEs of the three algorithms for the polarization angles
and
under different mutual coupling coefficients are shown, respectively. The estimation errors of the traditional un-decoupled algorithm and RD-MUSIC algorithm gradually increase with the increase in mutual coupling coefficients. In contrast, the algorithm of this paper maintains a lower error under the wide range of mutual coupling conditions. This result further verifies that the proposed algorithm can achieve more stable parameter estimation in an environment with significant mutual coupling effects, and still possesses significant anti-interference performance even when the array element’s number is reduced.
4.3. Effect of Signal-to-Noise Ratio on Estimation
In the last section, we investigate the effect of the magnitude of the SNR on the parameter estimation and compare it with the conventional undecoupled ESPRIT algorithm and RD-MUSIC algorithm. It has the same parameters of the incident signal as for the last experiment. The snapshot number
and SNR from 0 dB to 20 dB were used for 1000 Monte Carlo experiments to compare and observe the RMSE. The comparison of the RMSE of the magnitude of the SNR for the theta estimation of the three methods is shown in
Figure 10, and the comparison of the RMSE of the magnitude of the SNR for the gamma estimation and the eta estimation is shown in
Figure 11.
It can be observed from
Figure 10 that the estimation errors of all algorithms decrease as the SNR increases. However, at a lower SNR, the estimation error of the traditional undecoupled ESPRIT algorithm is much larger than that of the decoupled algorithm proposed. Although the RD-MUSIC algorithm demonstrates stability, its estimation accuracy is still inferior to the proposed algorithm. In contrast, the proposed algorithm can significantly reduce the estimation error in the presence of mutual coupling and exhibits high robustness in low-SNR conditions.
Figure 11 further demonstrates the RMSE results of the three algorithms in estimating the auxiliary polarization angles
and
. With the increase in SNR, the errors of this paper’s algorithm in
and
estimation are significantly lower than those of the undecoupled algorithm and RD-MUSIC algorithm, and the advantages are more obvious, especially at a low SNR. This result demonstrates that the proposed algorithm is superior in effectively suppressing the influence of the mutual coupling effect on parameter estimation, and can maintain high estimation accuracy and stability under various SNR conditions.
4.4. Discussion
The experimental results confirm that the proposed method outperforms ESPRIT and RD-MUSIC in terms of estimation accuracy, robustness to mutual coupling, and noise resilience.
Table 1 summarizes the key performance metrics, including RMSE ranges under different mutual coupling and SNR conditions. These results demonstrate that the proposed method effectively mitigates mutual coupling effects, maintains low estimation errors under varying SNRs, and is a more reliable solution for practical DOA and polarization estimation.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}