
Optimization of Knitted Strain Sensor Structures for a Real-Time Korean Sign Language Translation Glove System


Abstract
1. Introduction
2. Materials and Methods
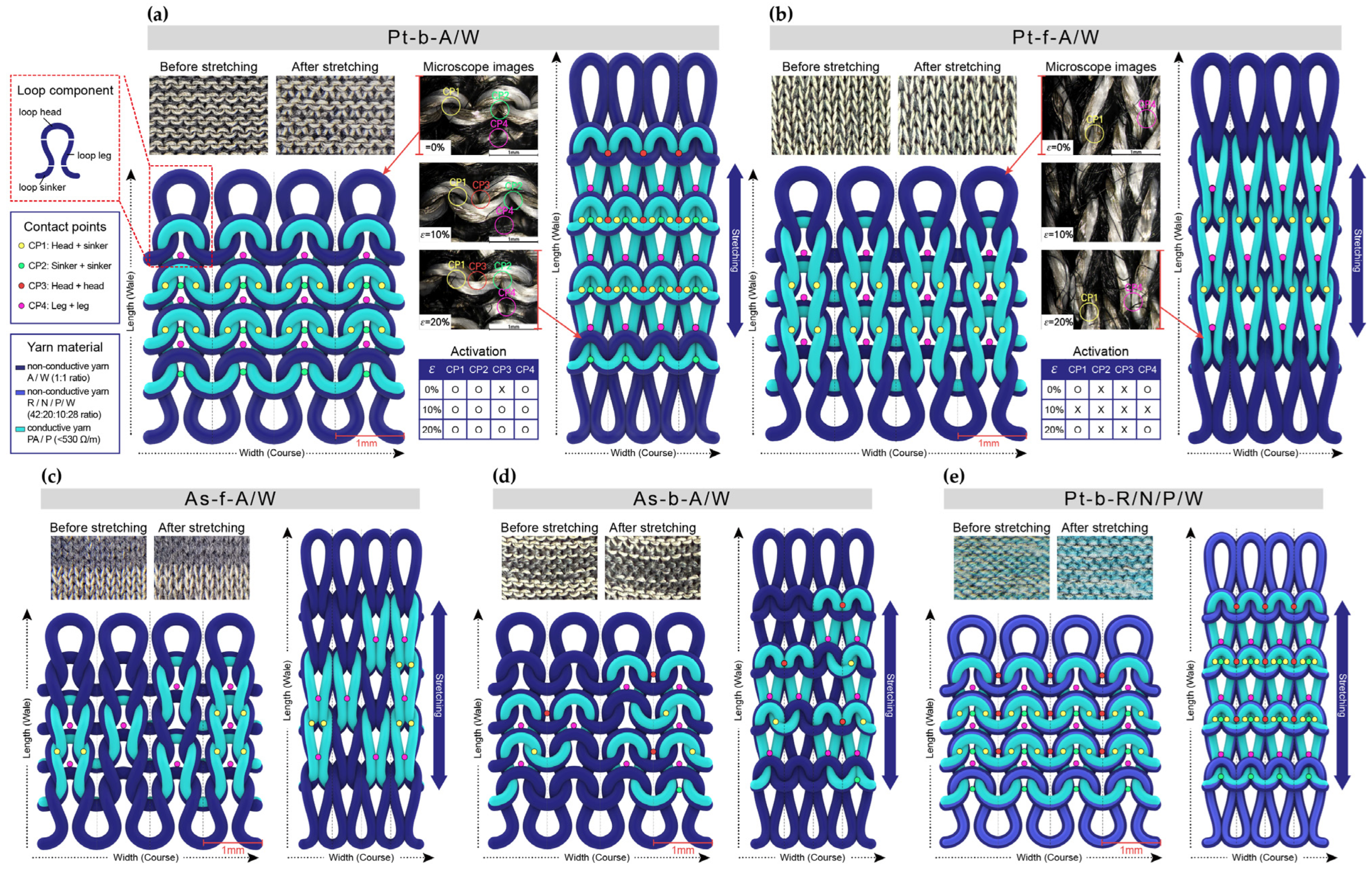
2.1. Knit Structure and Sensing Mechanism
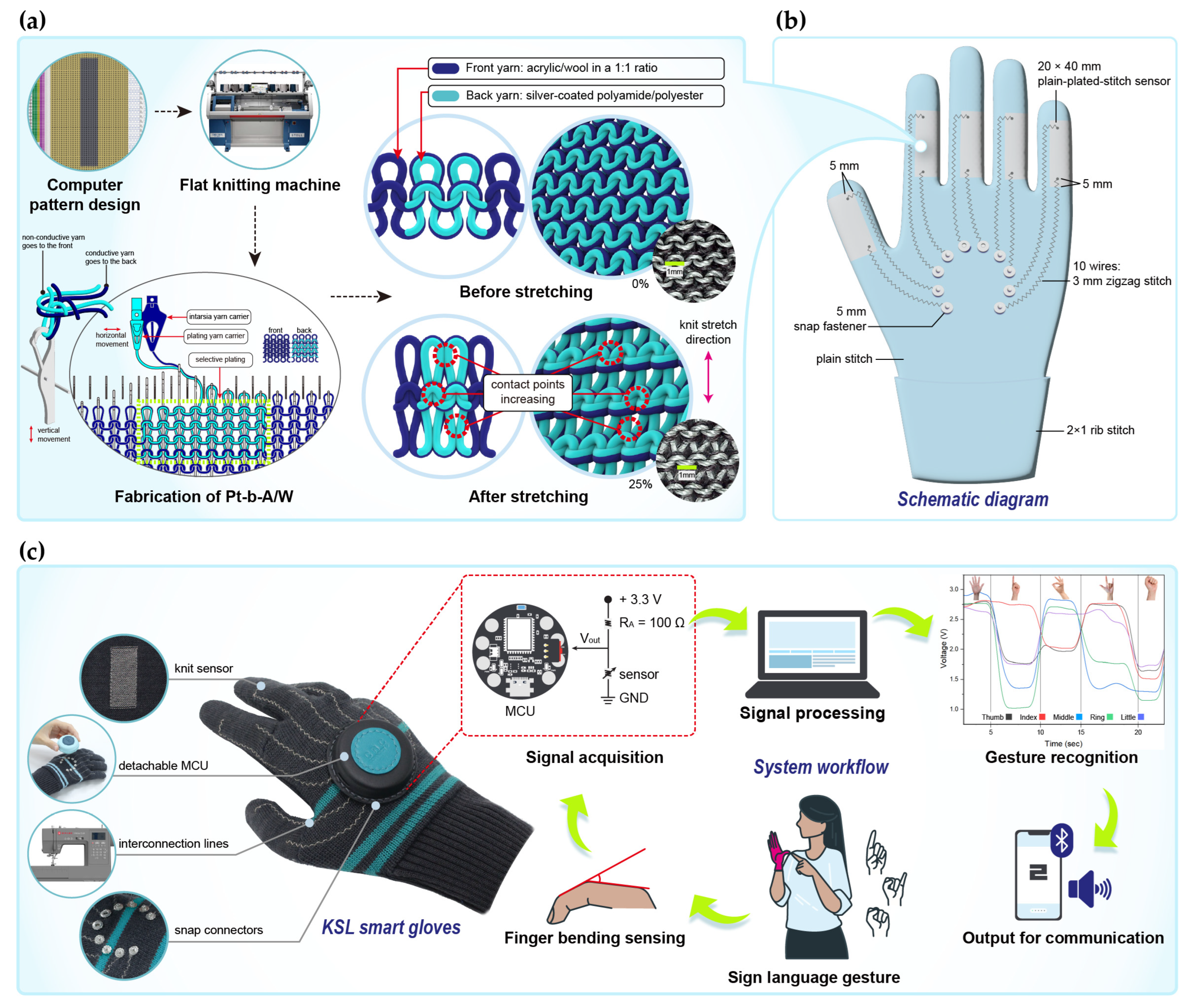
2.2. Knitted Sensor Fabrication
2.3. Fabrication of the KSL Glove
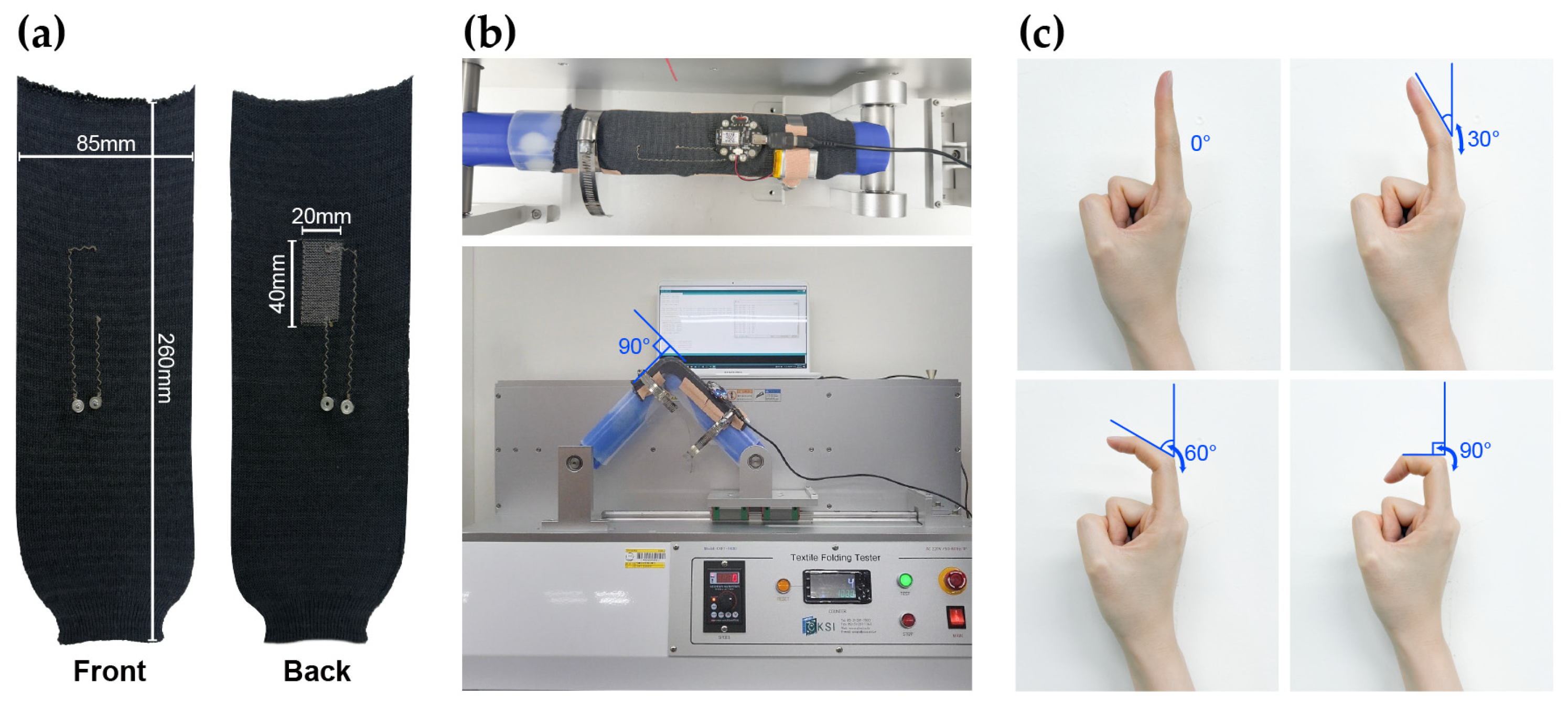
2.4. Experimental Setup for Performance Evaluation
2.4.1. Repetitive Bending Test
2.4.2. KSL Smart Glove Motion Recognition Test
3. Results and Discussion
3.1. Deformation Mechanism of Five Types of Knitted Strain Sensors
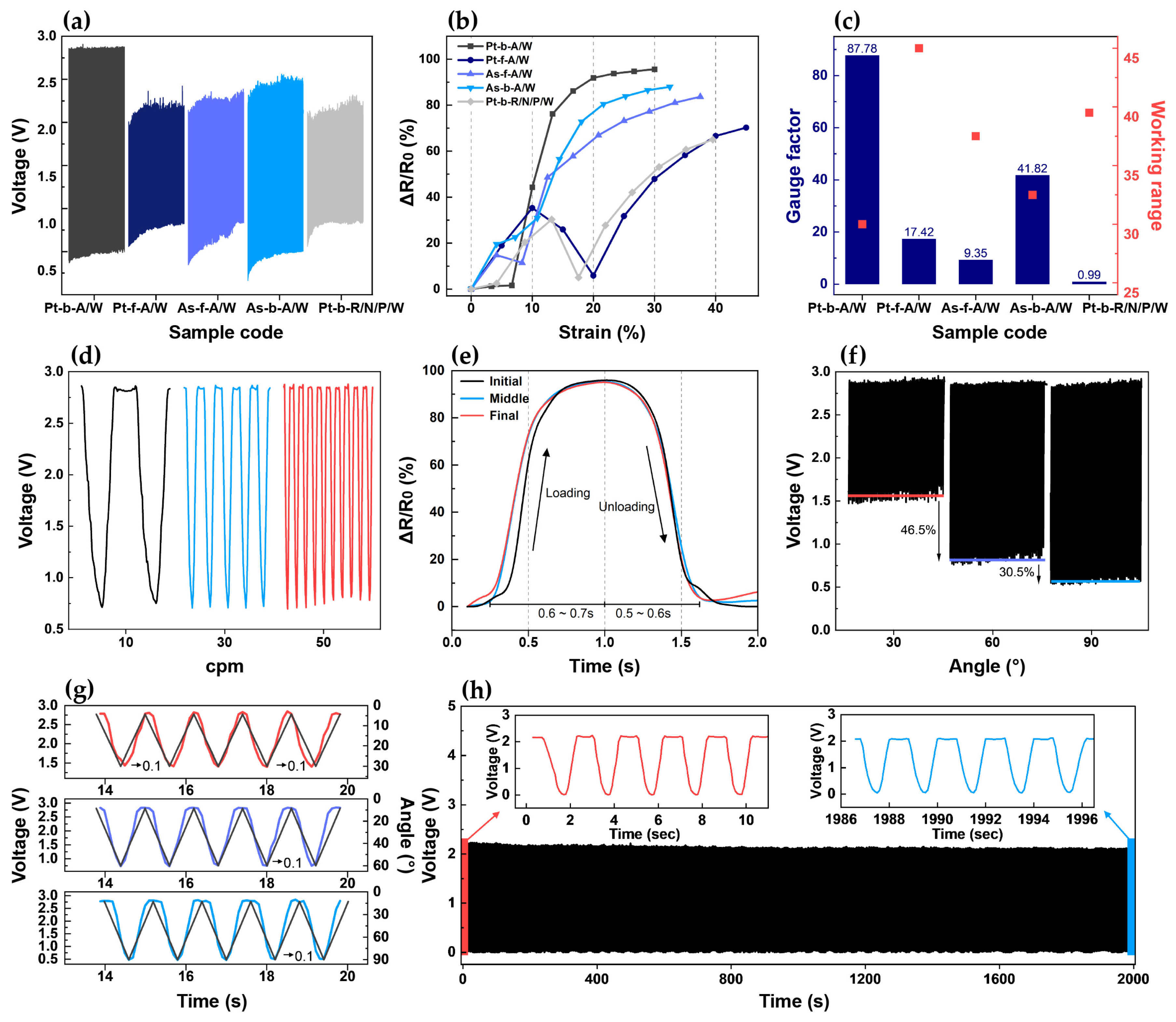
3.2. Dynamic Bending Test Results
3.2.1. The Bending Test Results and Initial Analysis for All Five Samples
3.2.2. In-Depth Analysis of the Bending Test Results for Pt-b-A/W
3.3. Development and Performance Evaluation of a KSL Smart Glove Translation System
3.3.1. Development
3.3.2. Real-Time Performance Evaluation of the Smart Glove for KSL Fingerspelling
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cipolla, R.; Pentland, A. Computer Vision for Human-Machine Interaction; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Hill, J.C.; Lillo-Martin, D.C.; Wood, S.K. Sign Languages: Structures and Contexts, 1st ed.; Routledge: Abingdon, UK, 2019; Chapter 1. [Google Scholar]
- Lane, H. Mask of Benevolence: Disabling the Deaf Community; Knopf: New York, NY, USA, 1992. [Google Scholar]
- Yaseen; Kwon, O.-J.; Kim, J.; Lee, J.; Ullah, F. Vision-Based Gesture-Driven Drone Control in a Metaverse-Inspired 3D Simulation Environment. Drones 2025, 9, 92. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, Y.; Zhou, X.; Liu, D.; Ji, J.; Feng, J. Intelligent Human–Computer Interaction for Building Information Models Using Gesture Recognition. Inventions 2025, 10, 5. [Google Scholar] [CrossRef]
- Park, S.; Youm, M.; Kim, J. IMU Sensor-Based Worker Behavior Recognition and Construction of a Cyber–Physical System Environment. Sensors 2025, 25, 442. [Google Scholar] [CrossRef]
- Pogrzeba, L.; Muschter, E.; Hanisch, S.; Wardhani, V.Y.P.; Strufe, T.; Fitzek, F.H.P.; Li, S.-C. A full-body IMU-based motion dataset of daily tasks by older and younger adults. Sci. Data 2025, 12, 531. [Google Scholar] [CrossRef] [PubMed]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch fabrication of customizable silicone-textile composite capacitive strain sensors for human motion tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef]
- Roh, J.S. Wearable textile strain sensors. Fash. Text. Res. J. 2016, 18, 734–736. [Google Scholar] [CrossRef]
- Ryu, H.; Park, S.; Park, J.-J.; Bae, J. A knitted glove sensing system with compression strain for finger movements. Smart Mater. Struct. 2018, 27, 055016. [Google Scholar] [CrossRef]
- Heo, J.S.; Shishavan, H.H.; Soleymanpour, R.; Kim, J.; Kim, I. Textile-based stretchable and flexible glove sensor for monitoring upper extremity prosthesis functions. IEEE Sens. J. 2020, 20, 1754–1760. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y.; Sung, M.; Bae, J.; Choi, Y. A knitted sensing glove for human hand postures pattern recognition. Sensors 2021, 21, 1364. [Google Scholar] [CrossRef]
- Han, X.; Miao, X.; Liu, Q.; Li, Y.; Wan, A. A fabric-based integrated sensor glove system recognizing hand gesture. Autex Res. J. 2022, 22, 458–465. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, T.; Li, X.; Wang, H.; Guo, X. The woven fabric sensor and the intelligent glove based on eco-flex/carbon composite ink. FlexTech 2025, 1, 53–62. [Google Scholar] [CrossRef]
- Cheng, X.; Shen, D.; Zheng, K.; Wu, Z.; Shi, L.; Hu, X. A wearable strain sensor for medical rehabilitation based on piezoresistive knitting textile. Sens. Actuators A Phys. 2025, 387, 116379. [Google Scholar] [CrossRef]
- Park, S.Y. Development of Finger Motion Recognition Gloves Using Knit-Type Strain Sensors. Master’s Thesis, Kookmin University, Seoul, Republic of Korea, 2022. [Google Scholar]
- Oh, Y.-K.; Kim, Y.-H. Evaluation of electrical characteristics of weft-knitted strain sensors for joint motion monitoring: Focus on plating stitch structure. Sensors 2024, 24, 7581. [Google Scholar] [CrossRef]
- Kim, J.S. Pattern design by knitting structure and properties. Korea Soc. Des. Trend 2014, 45, 480–481. [Google Scholar] [CrossRef]
- Hong, M.H.; Choi, K.M. Knit Design Guidebook; Kcpub: Seoul, Republic of Korea, 2009. [Google Scholar]
- Tohidi, S.D.; Zille, A.; Catarino, A.P.; Rocha, A.M. Effects of base fabric parameters on the electro-mechanical behavior of piezoresistive knitted sensors. IEEE Sens. J. 2018, 18, 4529–4535. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W.R.; Husain, M.D. Textile-based weft knitted strain sensors: Effect of fabric parameters on sensor properties. Sensors 2013, 13, 11114–11127. [Google Scholar] [CrossRef] [PubMed]
- Stoll GmbH & Co. KG. Stoll Training Manual: Flat Knitting Machine (Ident-No. 223 788_01); Stoll GmbH & Co. KG: Reutlingen, Germany, 2013. [Google Scholar]
- Jo, D.B. Development of Wearable Smart Gloves and Sign Language Translation System Using Conductive Polymer Composite Strain Sensor. Master’s Thesis, Hanyang University, Seoul, Republic of Korea, 2021. [Google Scholar]
- Häger-Ross, C.; Schieber, M.H. Quantifying the independence of human finger movements: Comparisons of digits, hands, and movement frequencies. J. Neurosci. 2000, 20, 8542–8550. [Google Scholar] [CrossRef] [PubMed]
- Lei, G.; Zhang, S.; Fang, Y.; Wang, Y.; Zhang, X. Investigation on the Sampling Frequency and Channel Number for Force Myography Based Hand Gesture Recognition. Sensors 2021, 21, 3872. [Google Scholar] [CrossRef]
- Kim, J.; Kang, E. Korean finger spelling recognition using hand landmarks. J. Korean Inst. Next Gener. Comput. 2022, 18, 81–91. [Google Scholar]
- Lee, J.W.; Nam, K.H. Korean Sign Language Linguistics; Nanam: Seoul, Republic of Korea, 2014. [Google Scholar]
- Rumon, M.A.A.; Cay, G.; Ravichandran, V.; Altekreeti, A.; Gitelson-Kahn, A.; Constant, N.; Solanki, D.; Mankodiya, K. Textile knitted stretch sensors for wearable health monitoring: Design and performance evaluation. Biosensors 2023, 13, 34. [Google Scholar] [CrossRef]
- Jang, J.H.; Kim, S.J.; Lee, K.M.; Park, S.J.; Park, G.Y.; Kim, B.J.; Oh, J.H.; Lee, M.J. Knitted strain sensor with carbon fiber and aluminum-coated yarn, for wearable electronics. J. Mater. Chem. C 2021, 9, 16440–16449. [Google Scholar] [CrossRef]
- Cieślik, K.; Łopatka, M.J. Research on speed and acceleration of hand movements as command signals for anthropomorphic manipulators as a master-slave system. Appl. Sci. 2022, 12, 3863. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample code | Pt-b-A/W | Pt-f-A/W | As-f-A/W | As-b-A/W | Pt-b-R/N/P/W | |||||
| Structure | plated | plated | assembled | assembled | plated | |||||
| Conductive yarn position | back side | front side | mainly front side | mainly back side | back side | |||||
| Photographic image | front | back | front | back | front | back | front | back | front | back |
 |  |  |  |  |  |  |  |  |  | |
| Yarn composition | 2-ply A/W + conductive yarn | 3-ply R/N/P/W + span + conductive yarn | ||||||||
| KSL | ㄱ | ㄹ | ㅁ | ㅂ | ㅅ | ㅇ | ㅈ | ㅊ | ㅋ | ㅎ | ㅏ | ㅣ | Unrecognized | Accuracy (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ㄱ | 25 | 100 | ||||||||||||
| ㄹ | 25 | 100 | ||||||||||||
| ㅁ | 24 | 1 | 96 | |||||||||||
| ㅂ | 25 | 100 | ||||||||||||
| ㅅ | 25 | 100 | ||||||||||||
| ㅇ | 25 | 100 | ||||||||||||
| ㅈ | 25 | 100 | ||||||||||||
| ㅊ | 25 | 100 | ||||||||||||
| ㅋ | 24 | 1 | 96 | |||||||||||
| ㅎ | 25 | 100 | ||||||||||||
| ㅏ | 25 | 100 | ||||||||||||
| ㅣ | 23 | 2 | 92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-H.; Oh, Y.-K. Optimization of Knitted Strain Sensor Structures for a Real-Time Korean Sign Language Translation Glove System. Sensors 2025, 25, 4270. https://doi.org/10.3390/s25144270
Kim Y-H, Oh Y-K. Optimization of Knitted Strain Sensor Structures for a Real-Time Korean Sign Language Translation Glove System. Sensors. 2025; 25(14):4270. https://doi.org/10.3390/s25144270
Chicago/Turabian StyleKim, Youn-Hee, and You-Kyung Oh. 2025. "Optimization of Knitted Strain Sensor Structures for a Real-Time Korean Sign Language Translation Glove System" Sensors 25, no. 14: 4270. https://doi.org/10.3390/s25144270
APA StyleKim, Y.-H., & Oh, Y.-K. (2025). Optimization of Knitted Strain Sensor Structures for a Real-Time Korean Sign Language Translation Glove System. Sensors, 25(14), 4270. https://doi.org/10.3390/s25144270