
Automated Sidewalk Surface Detection Using Wearable Accelerometry and Deep Learning
Abstract
1. Introduction
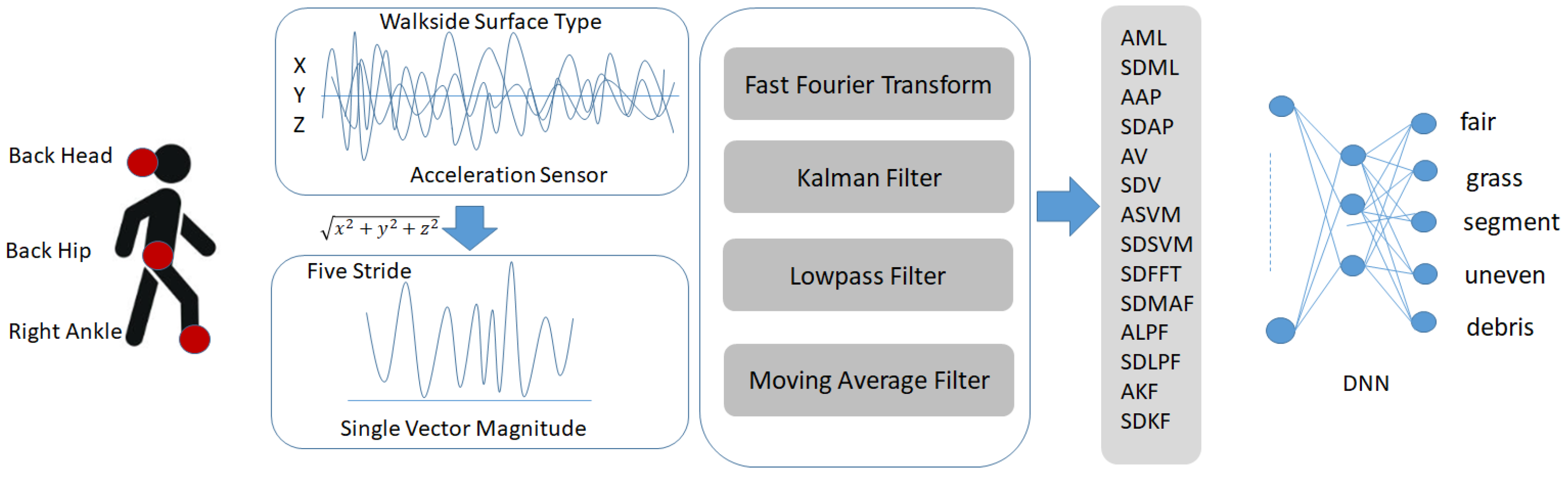
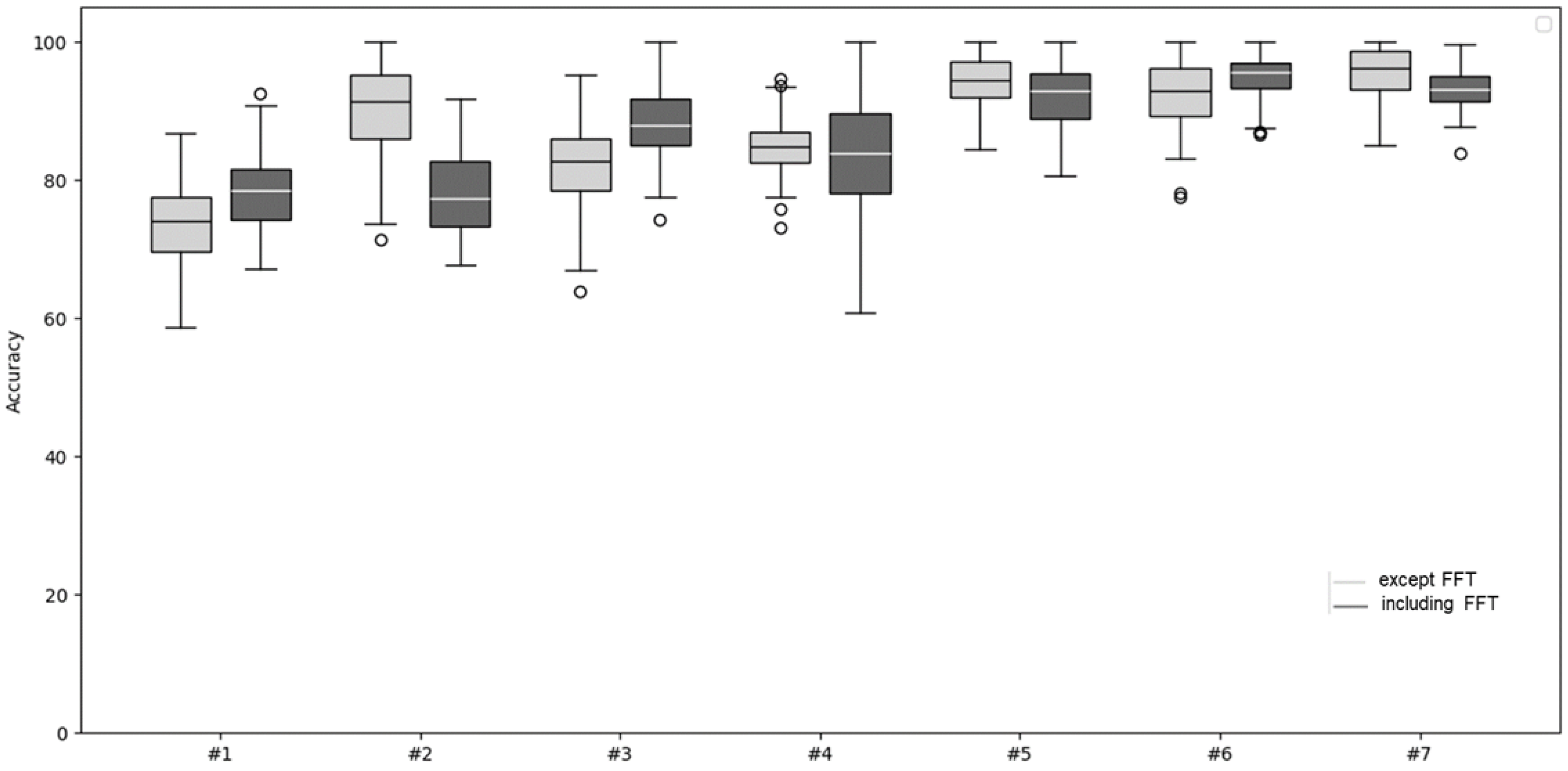
- A novel method is proposed that integrates deep learning with Kalman filtering and Fast Fourier Transform (FFT), leveraging foundational techniques in signal processing to classify various sidewalk surface types. This approach holds promise for broader applications in human behavior recognition and activity classification.
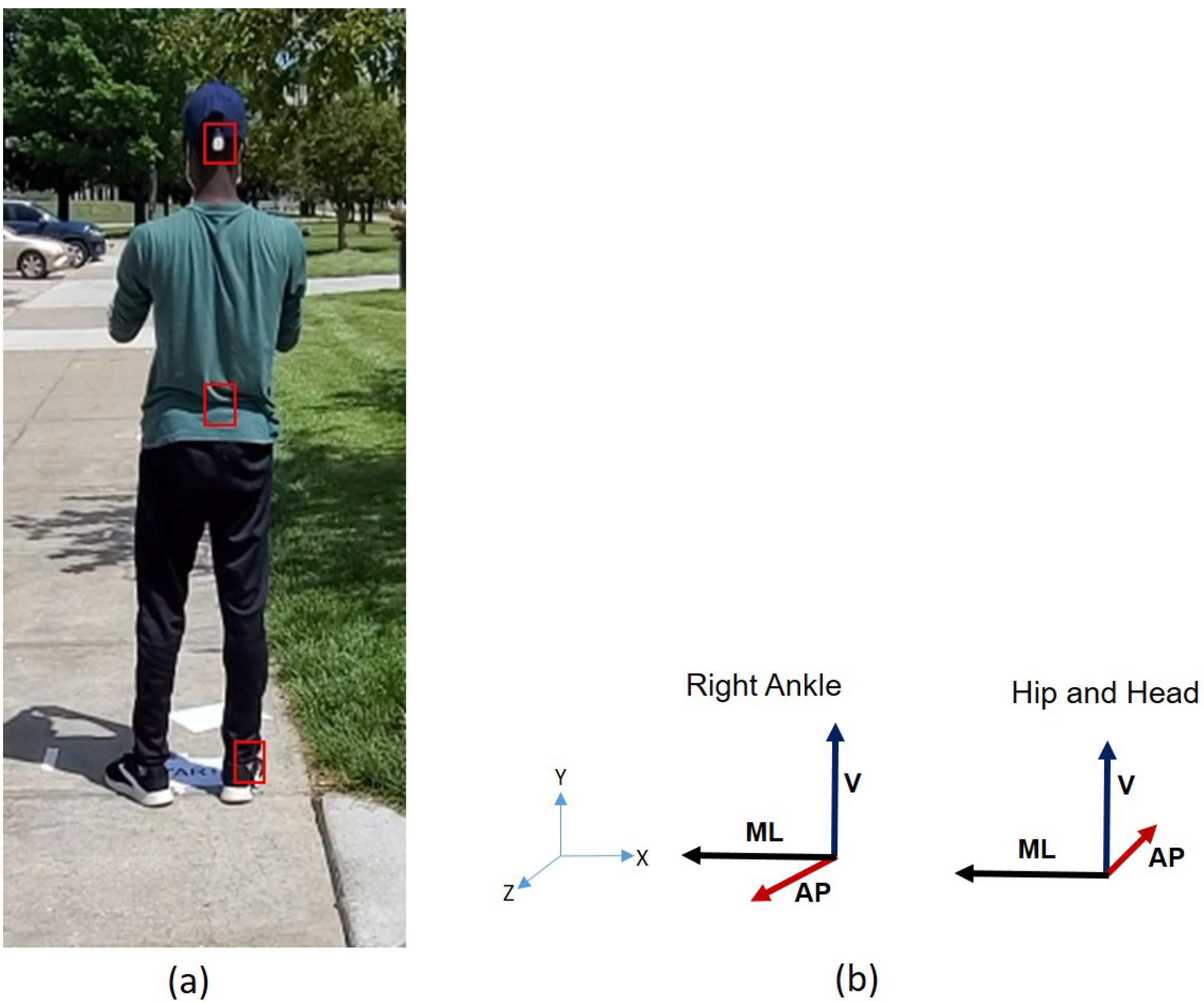
- The study also investigates optimal sensor placement for sidewalk surface detection using wearable devices. Recognition accuracy is evaluated across single-, dual-, and tri-sensor configurations (see Table 2). The configuration combining hip and ankle sensors yielded the highest accuracy.
2. Related Works
2.1. Traditional Approaches for Sidewalk Assessment
2.2. Advanced Approaches for Sidewalk Assessment
3. Classification of Sidewalk Surface Types Using Deep Learning and Signal Processing
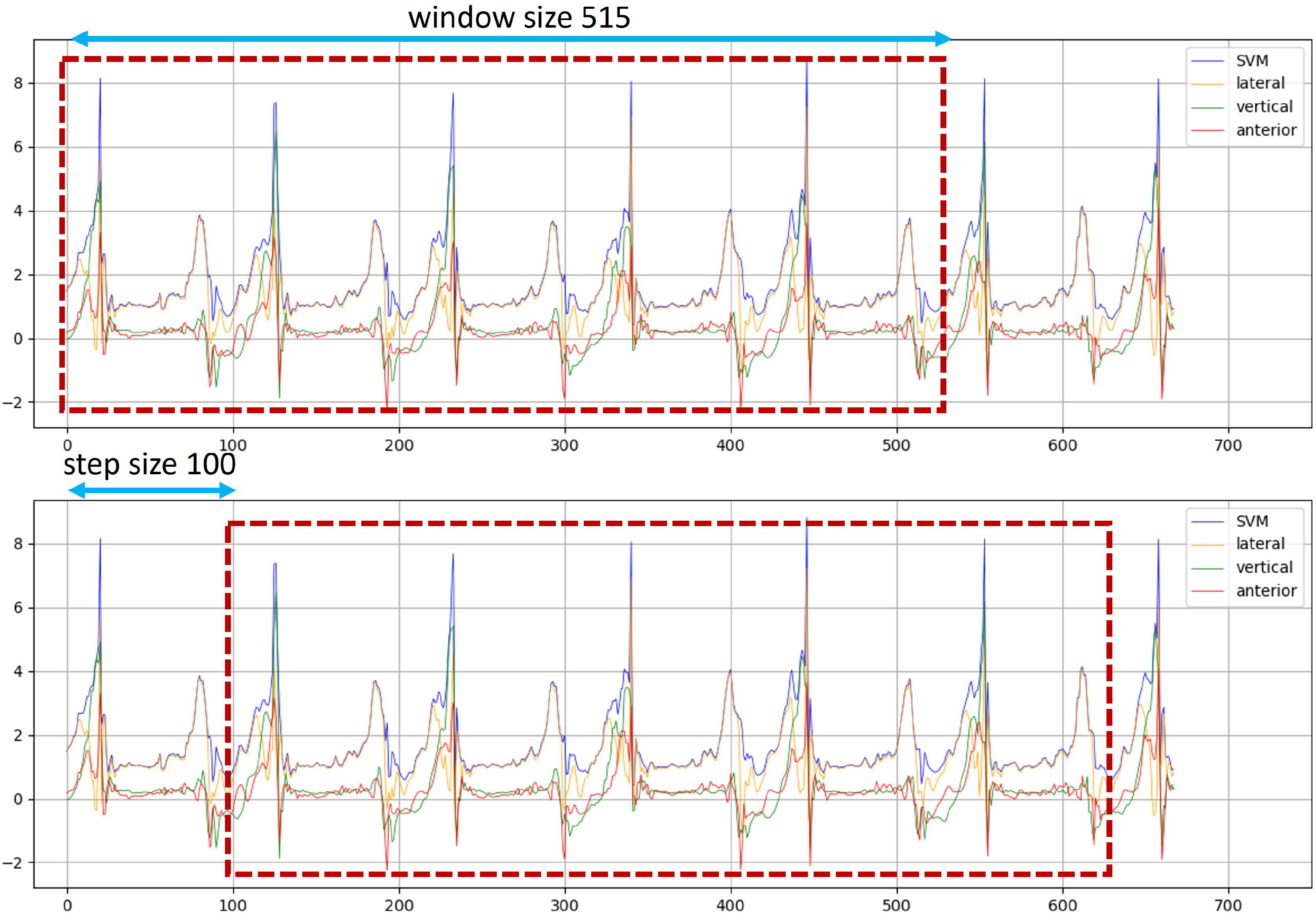
3.1. Data Collection
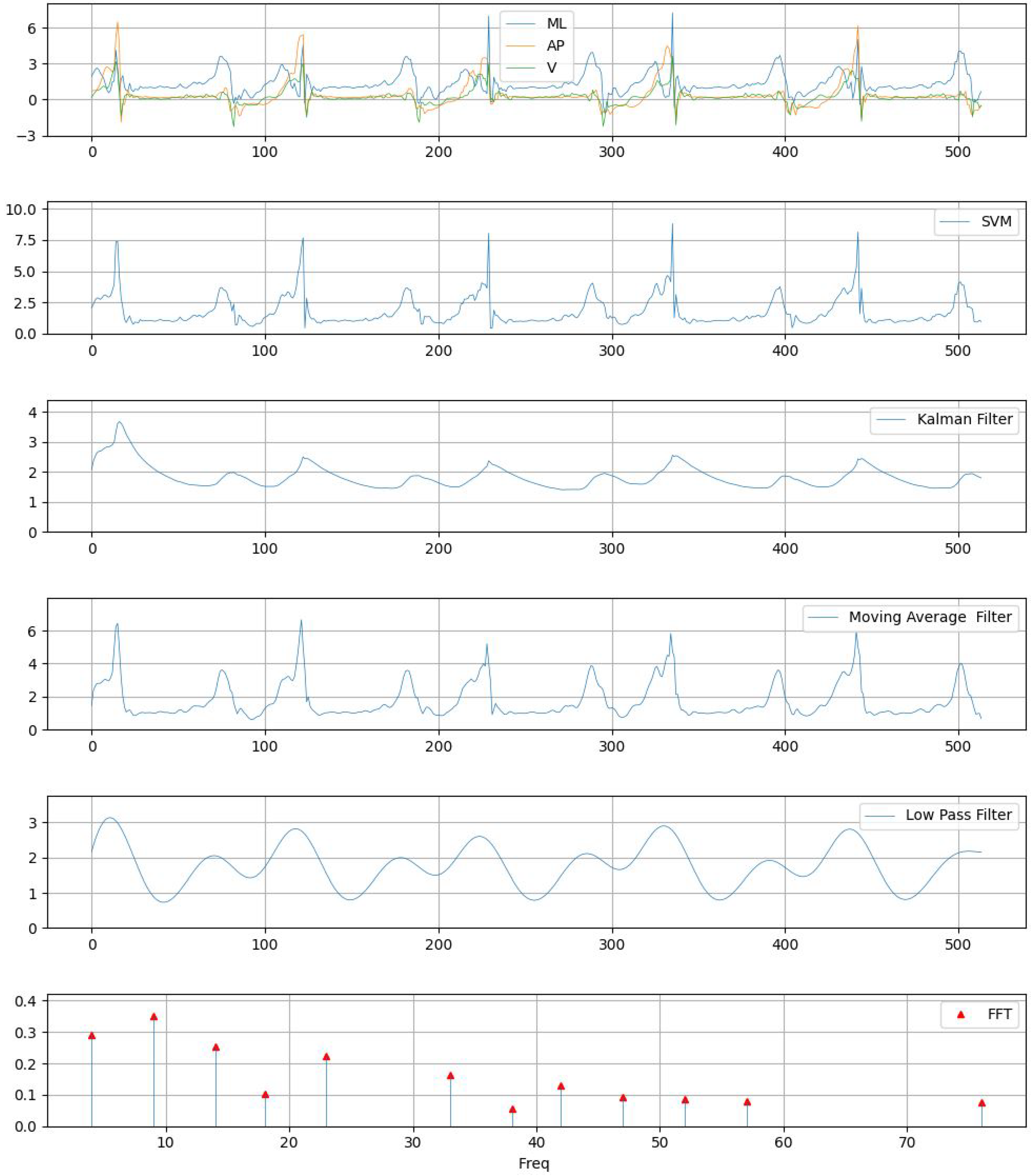
3.2. Feature Extraction Using FFT, Kalman, Low Pass, and Moving Average Filters
3.3. Structure of Deep Neural Network
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ro, R.H. Walkability: What is it? J. Urban. Int. Res. Placemaking Urban Sustain. 2009, 2, 145–166. [Google Scholar] [CrossRef]
- Ball, K.; Bauman, A.; Leslie, E.; Owen, N. Perceived Environmental Aesthetics and Convenience and Company Are Associated with Walking for Exercise among Australian Adults. Prev. Med. 2001, 33, 434–440. [Google Scholar] [CrossRef]
- Ahn, S.H. Effects of Walking and Outdoor Equipment Exercise on Inflammatory Factors and Metabolic Syndrome indicators in Elderly Women. J. Korean Soc. Sports Sci. 2023, 32, 681–690. [Google Scholar] [CrossRef]
- Kim, Y.W.; Kwon, Y.M. A Meta-Analysis of the Effect of a Walking Exercise Program Applied to Koreans. J. Sport Leis. Stud. 2024, 96, 417–428. [Google Scholar] [CrossRef]
- Mohdi, A.; Mehdi, M.; Muhammad, Z.S.; Zohreh, A.S.; Mehdi, A.K. Evaluating Capability Walkability Audit Tools Assessing Sidewalks. Sustain. Cities Soc. 2018, 37, 475–484. [Google Scholar] [CrossRef]
- Frank, L.D.; Sallis, J.F.; Conway, T.L.; Chapman, J.E.; Saelens, B.E.; Bachman, W. Many Pathways from Land Use to Health: Associations between Neighborhood Walkability and Active Transportation, Body Mass Index, and Air Quality. J. Am. Plann. Assoc. 2007, 72, 75–87. [Google Scholar] [CrossRef]
- Landis, B.W.; Vattikuti, V.R.; Ottenberg, R.M.; McLeod, D.S.; Guttenplan, M. Modeling the Roadside Walking Environment: Pedestrian Level of Service. Transp. Res. Rec. 2001, 1773, 82–88. [Google Scholar] [CrossRef]
- Ng, H.R.; Sossa, I.; Nam, Y.W.; Youn, J.H. Machine Learning Approach for Automated Detection of Irregular Walking Surfaces for Walkability Assessment with Wearable Sensor. Sensors 2022, 23, 193. [Google Scholar] [CrossRef]
- Ng, H.R.; Zhong, X.; Nam, Y.W.; Youn, J.H. Deep-Learning-Based Approach for Automated Detection of Irregular Walking Surfaces for Walkability Assessment with Wearable Sensor. Appl. Sci. 2023, 13, 13053. [Google Scholar] [CrossRef]
- Zhao, G.; Cao, M.; Vos, J.D. Exploring Walking Behaviour Perceived Walkability Older Adults in London. J. Transp. Health 2024, 37, 101832. [Google Scholar] [CrossRef]
- Ewing, R.; Handy, S. Measuring the Unmeasurable: Urban Design Qualities Related to Walkability. J. Urban Des. 2009, 14, 65–84. [Google Scholar] [CrossRef]
- Leslie, E.; Coffee, N.; Frank, L.; Owen, N.; Bauman, A.; Hugo, G. Walkability of Local Communities: Using Geographic Information Systems to Objectively Assess Relevant Environmental Attributes. Health Place 2007, 13, 111–122. [Google Scholar] [CrossRef]
- Menz, H.B.; Lord, S.R.; Fitzpatrick, R.C. Acceleration Patterns of the Head and Pelvis when Walking on Level and Irregular Surfaces. Gait Posture 2003, 18, 35–46. [Google Scholar] [CrossRef] [PubMed]
- Xia, K.; Huang, J.; Wang, H. LSTM-CNN Architecture for Human Activity Recognition. IEEE Access 2020, 8, 56855–56866. [Google Scholar] [CrossRef]
- Chen, L.; Hoey, J.; Nugent, C.D.; Cook, D.J.; Yu, Z. Sensor-based Activity Recognition. IEEE Trans. Syst. Man Cybern. C 2012, 42, 790–808. [Google Scholar] [CrossRef]
- Tsutsumi, H.; Kondo, K.; Takenaka, K.; Hasegawa, T. Sensor-Based Activity Recognition Using Frequency Band Enhancement Filters and Model Ensembles. Sensors 2023, 23, 1465. [Google Scholar] [CrossRef] [PubMed]
- Mario, M.O. Human Activity Recognition Based Single Sensor Square HV Acceleration Images Convolutional Neural Networks. IEEE Sens. J. 2019, 19, 1487–1498. [Google Scholar] [CrossRef]
- Manca, M.M.; Pes, B.; Riboni, D. Exploiting Feature Selection in Human Activity Recognition: Methodological Insights and Empirical Results Using Mobile Sensor Data. IEEE Access 2022, 10, 64043–64058. [Google Scholar] [CrossRef]
- Jain, A.; Kanhangad, V. Human Activity Classification Smartphones Using Accelerometer Gyroscope Sensors. IEEE Sens. J. 2018, 18, 1169–1177. [Google Scholar] [CrossRef]
- Gupta, P.; Dallas, T. Feature Selection Activity Recognition System Using Single Triaxial Accelerometer. IEEE Trans. Biomed. Eng. 2014, 61, 1780–1786. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Yang, K.H. A People-centric Sensing Approach Detecting Sidewalk Defects. Adv. Eng. Inf. 2016, 30, 660–671. [Google Scholar] [CrossRef]
- Corazza, M.V.; Mascio, P.D.; Moretti, L. Managing Sidewalk Pavement Maintenance: A Case Study to Increase Pedestrian Safety. J. Traffic Transp. Eng. 2016, 3, 203–214. [Google Scholar] [CrossRef]
- Golshan, H.M.; Hebb, A.O.; Hanrahan, S.J.; Nedrud, J.; Mahoor, M.H. FFT-based Synchronization Approach Recognize Human Behaviors Using STN-LFP Signal. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 979–983. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Nam, Y. The influence of built environment features on crowdsourced physiological responses of pedestrians in neighborhoods. Comput. Environ. Urban Syst. 2019, 75, 161–169. [Google Scholar] [CrossRef]
- Sousa, N.; Coutinho-Rodrigues, J.; Natividade-Jesus, E. Sidewalk Infrastructure Assessment Using a Multicriteria Methodology for Maintenance Planning. J. Infrastruct. Syst. 2017, 23, 05017002. [Google Scholar] [CrossRef]
- Dlhaq, D.; Basfian, M.F.; Ayuningtyas, N.V.; Brilianti, D.F. Analysis of Sidewalk Comfort Level Based on Width, Cleanliness, Surface Condition, Lighting, and Availability of Signage and Directional Indicators on Sudibyo Street Sidewalks in Tegal City. J. Sci. Res. Educ. Technol. (JSRET) 2024, 3, 1611–1621. [Google Scholar] [CrossRef]
- Gao, W.; Qian, Y.; Chen, H.; Zhong, Z.; Zhou, M.; Aminpour, F. Assessment of Sidewalk Walkability: Integrating Objective and Subjective Measures of Identical Context-Based Sidewalk Features. Sustain. Cities Soc. 2022, 87, 104142. [Google Scholar] [CrossRef]
- Takahashi, J.; Kobana, Y.; Tobe, Y. Classification of Steps on Road Surface Using Acceleration Signals. In Proceedings of the MOBIQUITOUS 2015, Coimbra, Portugal, 22–24 July 2015; pp. 229–234. [Google Scholar] [CrossRef]
- Damaceno, R.; Ferreira, L.; Miranda, F.; Hosseini, M.; Cesar, R., Jr. SideSeeing: A Multimodal Dataset for Sidewalk Accessibility Assessment Integrating IMU, GPS, and video data. arXiv 2024, arXiv:2407.06464. [Google Scholar]
- Jiang, S.; Wang, H.; Fan, W.; Min, C.; Zhang, X.; Ma, J. A Non-Contact Method for Detecting and Evaluating the Non-Motor Use of Sidewalks Based on Three-Dimensional Pavement Morphology Analysis. Sensors 2025, 25, 1721. [Google Scholar] [CrossRef]
- He, Y.; Chen, Y.; Tang, L.; Chen, J.; Tang, J.; Yang, X.; Su, S.; Zhao, C.; Xiao, N. Accuracy Validation of a Wearable IMU-based Gait Analysis in Healthy Female. BMC Sports Sci. Med. Rehabil. 2024, 16, 2. [Google Scholar] [CrossRef]
- Miyata, A.; Araki, I.; Wang, T. Barrier Detection Using Sensor Data from Unimpaired Pedestrians. In Human Aspects of IT for the Aged Population; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 10908, pp. 308–319. [Google Scholar]
- Kobayashi, S.; Hasegawa, T. Smartphone-based Estimation Sidewalk Surface Type Via Deep Learning. Sens. Mater. 2021, 33, 35–51. [Google Scholar] [CrossRef]
- Pundlik, S.; Tomasi, N.; Houston, K.E.; Kumar, A.; Shivshanker, P.; Bowers, A.R.; Peli, E.; Guo, G. Gaze Scanning on Mid-Lock Sidewalks by Pedestrians with Homonymous Hemianopia with or without Spatial Neglect. Invest. Ophthalmol. Vis. Sci. 2024, 65, 46. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Basu, A.; Durandau, G.; Sartori, M. Wearable Real-Time Kinetic Measurement Sensor Setup for Human Locomotion. Wearable Technol. 2023, 4, e11. [Google Scholar] [CrossRef] [PubMed]
- Küderle, A.; Roth, N.; Zlatanovic, J.; Zrenner, M.; Eskofier, B.; Kluge, F. The Placement of Foot-Mounted IMU Sensors Does Affect the Accuracy of Spatial Parameters during Regular Walking. PLoS ONE 2022, 17, e0269567. [Google Scholar] [CrossRef] [PubMed]
- MbientLab. MetaMotionR, San Francisco, CA, USA. [Online]. Available online: https://mbientlab.com/store/metamotionr/ (accessed on 21 June 2025).
- Thyagarajan, K.S. Introduction to Digital Signal Processing Using MATLAB with Application to Digital Communications, 1st ed.; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Ifeachor, E.; Jervis, B.W. Digital Signal Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Kim, P. Kalman Filter for Beginners: With MATLAB Examples; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2011. [Google Scholar]
- Fawcett, T. An Introduction to ROC Analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Output Shape | Parameters |
|---|---|---|
| Linear | [−1, 1000] | 16,000 |
| ReLU | [−1, 1000] | 0 |
| Linear | [−1, 800] | 800,800 |
| ReLU | [−1, 800] | 0 |
| Linear | [−1, 5] | 4005 |
| Sigmoid | [−1, 5] | 0 |
| No. | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
|---|---|---|---|---|---|---|---|
| 0 | 73.33 | 70.00 | 80.00 | 76.67 | 83.33 | 93.33 | 91.67 |
| 1 | 80.00 | 78.33 | 90.00 | 91.67 | 100.00 | 96.67 | 98.33 |
| 2 | 81.67 | 78.33 | 93.33 | 88.33 | 93.33 | 100.00 | 93.33 |
| 3 | 81.67 | 71.67 | 91.67 | 86.67 | 91.67 | 93.33 | 95.00 |
| 4 | 83.33 | 78.33 | 91.67 | 93.33 | 93.33 | 95.00 | 93.33 |
| 5 | 86.67 | 88.33 | 88.33 | 93.33 | 95.00 | 100.00 | 96.67 |
| 6 | 86.67 | 85.00 | 90.00 | 90.00 | 95.00 | 96.67 | 93.33 |
| 7 | 71.67 | 76.67 | 91.67 | 80.00 | 96.67 | 95.00 | 91.67 |
| 8 | 76.67 | 73.33 | 90.00 | 78.33 | 88.33 | 93.33 | 90.00 |
| 9 | 71.67 | 80.00 | 75.00 | 68.33 | 88.33 | 88.33 | 90.00 |
| avg | 79.34 | 78.00 | 88.17 | 84.67 | 92.50 | 95.17 | 93.33 |
| std | 5.44 | 5.36 | 5.60 | 7.99 | 4.55 | 3.29 | 2.58 |
| Category | Feture | Description |
|---|---|---|
| Time Domain | AML | average of -axis for 515 acceleration value |
| SDML | standard deviation of -axis for 515 acceleration value | |
| AAP | average of -axis for 515 acceleration value | |
| SDAP | standard deviation of AP-axis for 515 acceleration value | |
| AV | average of V-axis for 515 acceleration value | |
| SDV | standard deviation of V-axis for 515 acceleration value | |
| ASVM | average of for 515 acceleration value | |
| SDSVM | standard deviation of for 515 acceleration value | |
| Filter Domain | AMAF | average of moving average filter for 515 acceleration value |
| SDMAF | standard deviation of moving average filter for 515 acceleration value | |
| ALPF | average of low pass filter for 515 acceleration value | |
| SDLPF | standard deviation of low pass filter for 515 acceleration value | |
| AKF | average of Kalman filter for 515 acceleration value | |
| SDKF | standard deviation of Kalman filter for 515 acceleration value | |
| Frequency Domain | SDFFT | standard deviation of FFT for 515 acceleration value |
| No. | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
|---|---|---|---|---|---|---|---|
| 0 | 56.67 | 78.33 | 78.33 | 73.33 | 88.33 | 91.67 | 91.67 |
| 1 | 83.33 | 91.67 | 95.00 | 90.00 | 98.33 | 95.00 | 95.00 |
| 2 | 76.67 | 91.67 | 95.00 | 85.00 | 93.33 | 98.33 | 96.67 |
| 3 | 78.33 | 88.33 | 93.33 | 90.00 | 93.33 | 93.33 | 95.00 |
| 4 | 78.33 | 95.00 | 86.67 | 85.00 | 95.00 | 96.67 | 93.33 |
| 5 | 80.00 | 91.67 | 86.67 | 88.33 | 93.33 | 90.00 | 95.00 |
| 6 | 75.00 | 93.33 | 90.00 | 80.00 | 95.00 | 95.00 | 96.67 |
| 7 | 68.33 | 78.33 | 81.67 | 80.00 | 90.00 | 95.00 | 93.33 |
| 8 | 75.00 | 80.00 | 85.00 | 83.33 | 86.67 | 93.33 | 90.00 |
| 9 | 65.00 | 83.33 | 75.00 | 76.67 | 88.33 | 85.00 | 88.33 |
| avg | 73.67 | 87.17 | 86.67 | 83.17 | 92.17 | 93.33 | 93.50 |
| std | 7.63 | 6.20 | 6.54 | 5.35 | 3.50 | 3.57 | 2.63 |
| Sub. | A | B | C | D | E | F | G | H | I | J | K | L |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Num. Corr. | 48 | 48 | 49 | 48 | 50 | 45 | 47 | 50 | 44 | 47 | 46 | 50 |
| Rate Corr. | 96% | 96% | 98% | 96% | 100% | 90% | 94% | 100% | 88% | 94% | 92% | 100% |
| Ref. | Features | Model | Recognition Categories | Acc. |
|---|---|---|---|---|
| Ng et al. [8] | 20 time-domain features | Support Vector Machine | well-paved, grass-covered, obstacles with physical obstructions, uneven surface, debris-covered | 87% |
| Ng et al. [9] | 20 time-domain features | LSTM | well-paved, grass-covered, obstacles with physical obstructions, uneven surface, debris-covered | 88% |
| Miyata et al. [32] | 9 time-domain features, 27 frequency-domain features | Support Vector Machine | flat, up/down stairs, up/down step, low/high slope, swinging door | 85% |
| Kobayasi et al. [33] | 20 time-domain features, 10 frequency-domain features | VGG16 | asphalt, gravel, lawn, grass, sand, mat | 71.44% |
| Proposed | 8 time-domain features, 6 filter-domain features, 1 frequency-domain feature | DNN | well-paved, grass-covered, obstacles with physical obstructions, uneven surface, debris-covered | 95.17% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, D.-E.; Youn, J.-H.; Song, T.-S. Automated Sidewalk Surface Detection Using Wearable Accelerometry and Deep Learning. Sensors 2025, 25, 4228. https://doi.org/10.3390/s25134228
Park D-E, Youn J-H, Song T-S. Automated Sidewalk Surface Detection Using Wearable Accelerometry and Deep Learning. Sensors. 2025; 25(13):4228. https://doi.org/10.3390/s25134228
Chicago/Turabian StylePark, Do-Eun, Jong-Hoon Youn, and Teuk-Seob Song. 2025. "Automated Sidewalk Surface Detection Using Wearable Accelerometry and Deep Learning" Sensors 25, no. 13: 4228. https://doi.org/10.3390/s25134228
APA StylePark, D.-E., Youn, J.-H., & Song, T.-S. (2025). Automated Sidewalk Surface Detection Using Wearable Accelerometry and Deep Learning. Sensors, 25(13), 4228. https://doi.org/10.3390/s25134228