
UAVRM-A*: A Complex Network and 3D Radio Map-Based Algorithm for Optimizing Cellular-Connected UAV Path Planning


Abstract
1. Introduction
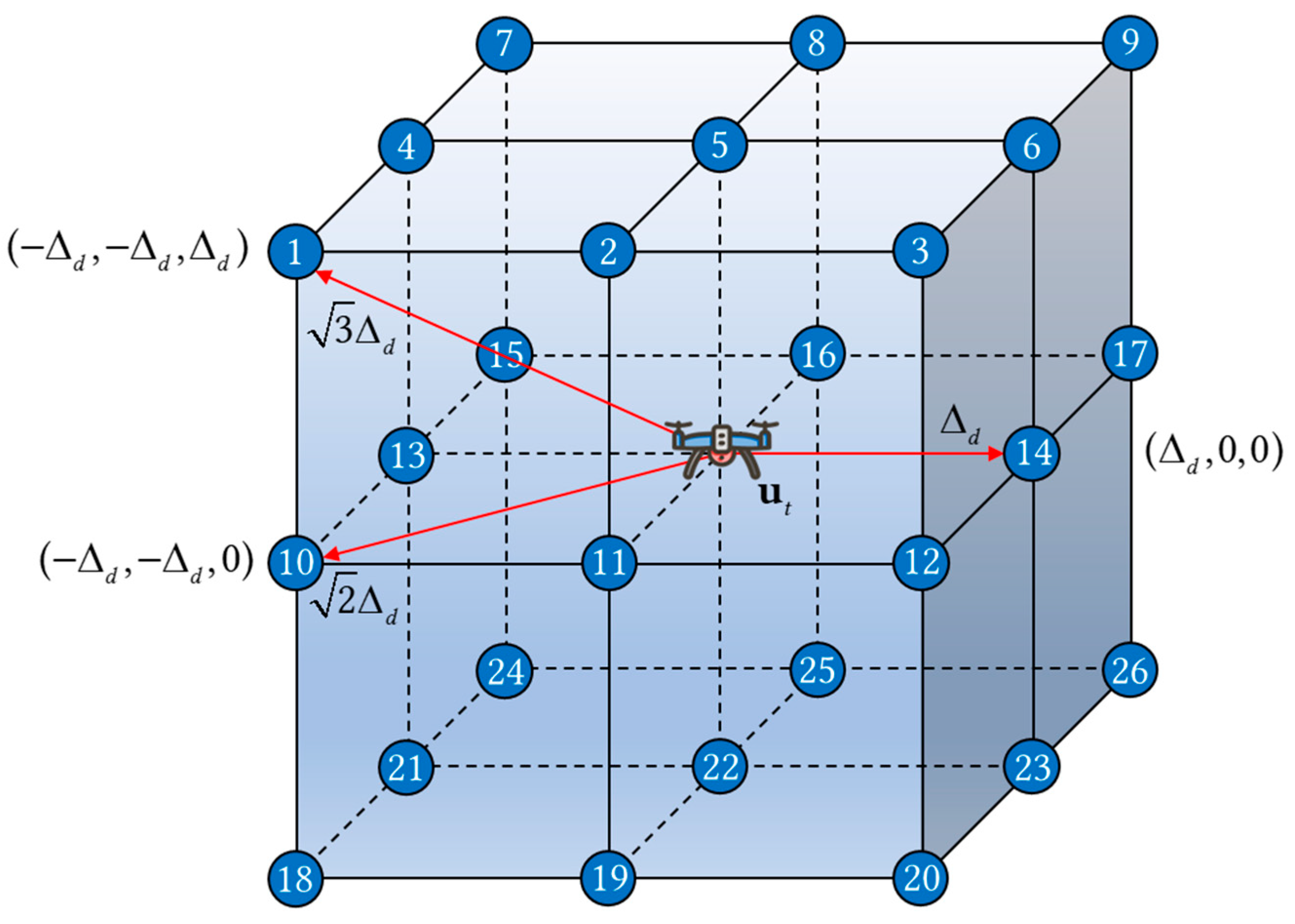
- Navigation Model Based on Complex Networks: We constructed a novel navigation model grounded in complex network theory, utilizing a 3D radio map to represent the UAV’s operational environment. This model defines the UAV’s action space and assigns path weights based on optimal values tailored to the specific path planning problem. This approach provides a robust computational framework that supports efficient and accurate pathfinding, offering a significant advancement in modeling UAV navigation in real-world environments.
- Proposed UAVRM-A* Algorithm: Building upon the traditional A* algorithm, we propose the UAVRM-A* algorithm, which incorporates essential UAV flight characteristics and obstacle avoidance capabilities. Unlike the traditional A* method, UAVRM-A* accounts for obstacles such as buildings and ensures that flight paths respect the UAV’s turning radius, preventing abruptly or overly sharp turns. This enhancement significantly improves path smoothness and operational safety, aligning the pathfinding process with the realistic constraints of UAV flight.
- Comparative Performance Evaluation: We conducted extensive experiments in a dense urban scenario using the generated 3D radio map, comparing the performance of the UAVRM-A* algorithm against both the traditional A* algorithm and the DRL method. The results validate the superiority of UAVRM-A* in terms of obstacle avoidance, alignment with UAV flight dynamics, and computational efficiency. This comparative analysis demonstrates that UAVRM-A* not only achieves performance on par with DRL but does so with significantly reduced computational time and radio outage duration.
2. Related Work
2.1. Related Work About Path Planning for Cellular-Connected UAVs
2.2. Common Issues of Related Work
- Overly Idealized Scenarios: Path planning solutions in the majority of studies solely consider the factor of the shortest path from the starting point to the destination, without incorporating constraints from real-world environments, such as maintaining network coverage along the generated path and avoiding obstacles.
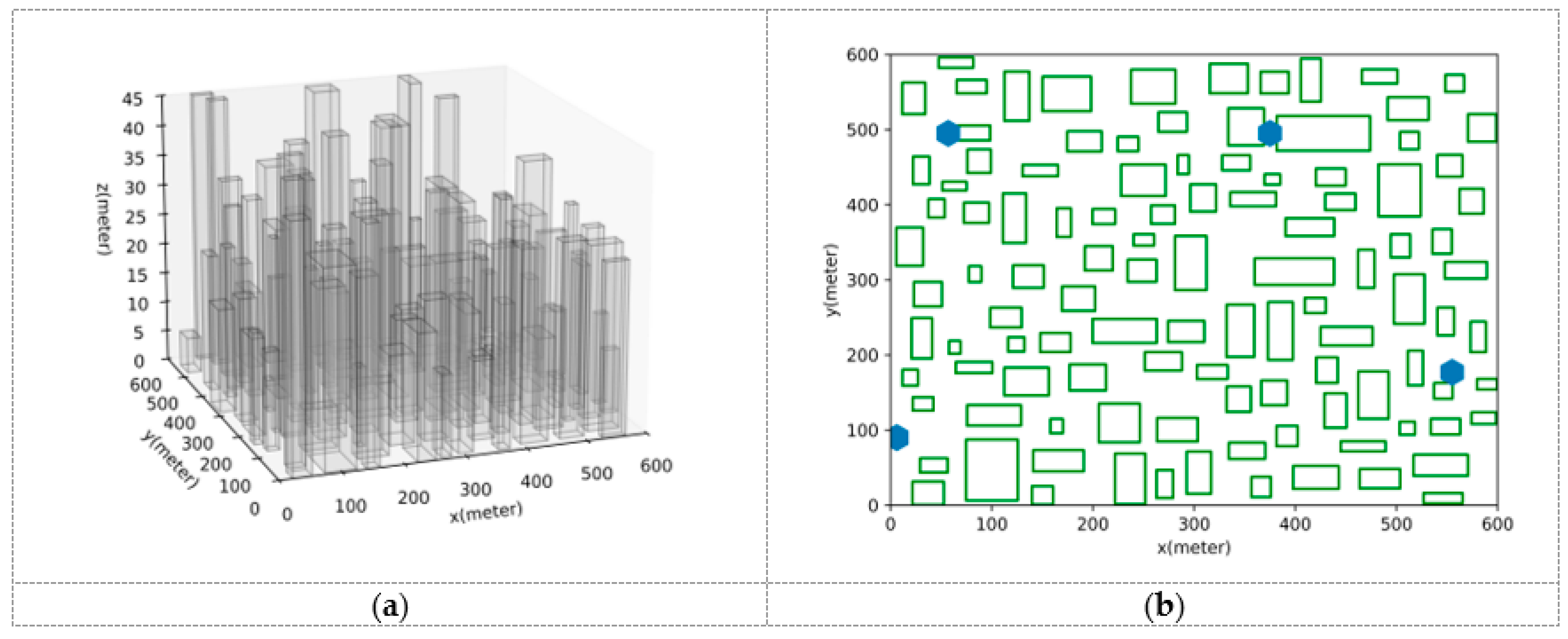
- Oversimplified Experimental Environments: These studies predominantly employ 2D environments as their experimental settings, assuming that UAVs fly at a constant altitude, while research on path planning in 3D environments remains limited. In addition, the experimental scenarios are overly simplistic; for instance, in studies applied to urban areas, the city models used in experiments often exhibit overly regular or sparse building distributions, significantly differing from real-world environments.
- Lengthy training time: To achieve satisfactory results, machine learning typically requires numerous iterations in the training process to ensure model convergence, with each training session needing to commence from scratch. This results in significantly prolonged training time.
- Complex structure of training samples: To ensure effective training outcomes, machine learning generally necessitates a sufficient quantity of samples and adequately comprehensive parameters.
- Low generalization ability of the trained model: The models obtained after training in research are only applicable to specific environments or scenarios. In reality, environments are constantly changing. Once an environmental change occurs, the models become ineffective, necessitating substantial time to retrain for the new environment and obtain a new model.
- Overly Idealized Experimental Settings: Complex network methodologies typically reconstruct the experimental environment into a weighted graph serving as navigation model, seeking an optimal path with the optimal weight. Yet relevant studies generally lack detailed discussions on the navigation model and overly simplify the structural settings within the model. The weights assigned to each path still adhere to idealized scenarios or are arbitrarily set without incorporating factors related to the actual environment, resulting in a mismatch with the form of the research problem.
- Limitations of Comparative Studies: Relevant research primarily focuses on improving traditional graph theory algorithms; hence, the scope of comparative studies is limited to algorithms within the field of graph theory. Although there is no inherent restriction preventing the inclusion of algorithms from other fields in comparative studies, the diverse solution forms and applicable environments across various fields pose significant challenges in finding a single environment that can accommodate all these algorithms simultaneously. Consequently, few studies have taken multiple-field algorithm comparison into consideration.
3. Problem Definition
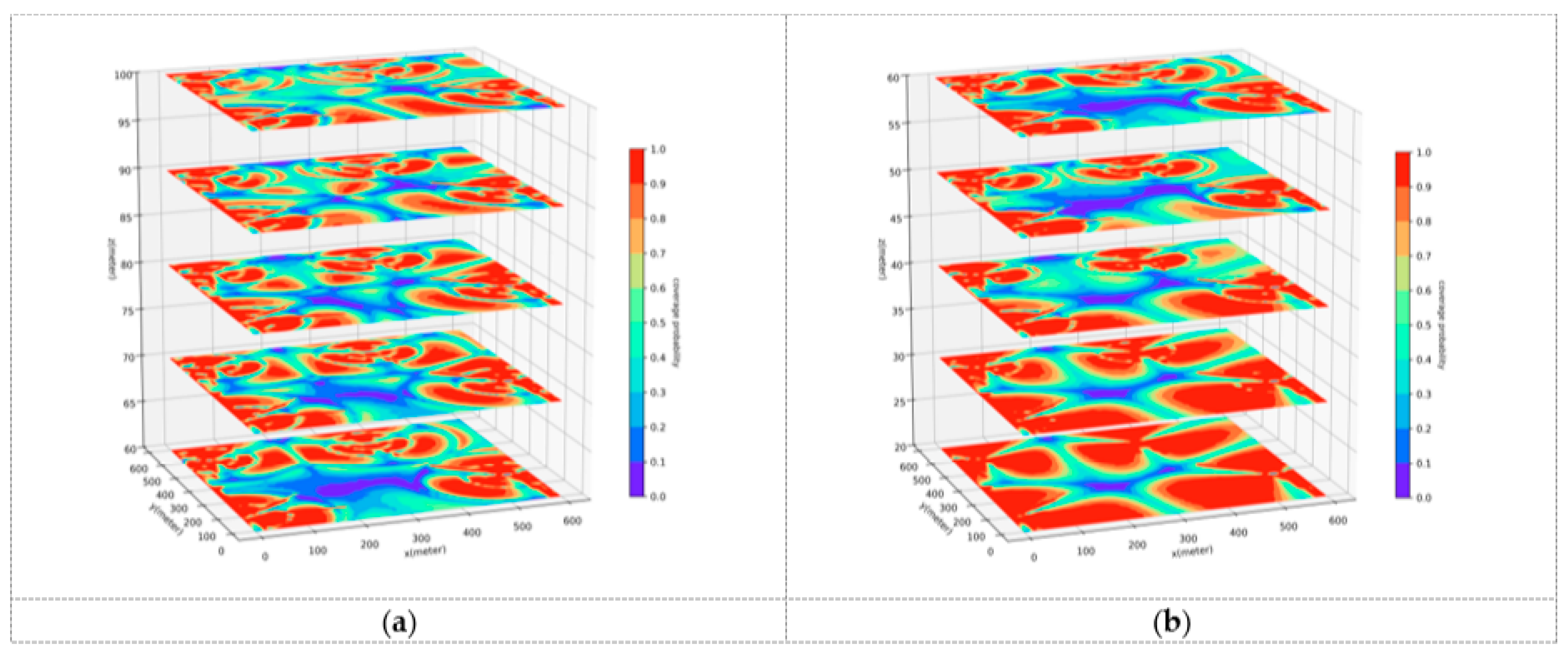
3.1. Radio Map Model
3.2. Problem Model
- (1)
- Having the shortest flight time T;
- (2)
- Experiencing the minimal radio outage duration depending on the outage probability .
4. Methodology
4.1. Navigation Model
- Step 1: Construct the graph .
- Step 2: Obtain each location based on the problem model in Formula (9) and retrieve its outage probability from the radio map. Then, add node to V according to Formula (10).
- Step 3: Following the actions in the action set, add a directed edge between all adjacent nodes and to E based on Formula (11). Calculate the edge weight and store it in the “weight” attribute according to Formula (12) using the “outage” attribute of the corresponding nodes.
4.2. Traditional A* Algorithm
4.3. UAVRM-A* Algorithm
- Step 1: Initialization. Choose the starting point node from the navigation model and place it into the open list OPEN. Calculate based on Formula (14); set , , .
- Step 2: Selection. Select the node with the minimum value from the open list as the current node, denoted as . Remove from the open list OPEN and add it to the closed list CLOSE to avoid duplicate visits.
- Step 3: Expand Nodes. Identify the neighbor nodes based on all directed edges originating from . For each neighbor node of ,
- (a)
- Calculate according to Formula (14).
- (b)
- If , it indicates that has not been explored. Add to OPEN and set , , . Calculate and based on Formula (14). Meanwhile, if , add it to CLOSE instead of OPEN to prevent obstacle collision.
- (c)
- If , calculate turning angle according to Formulas (16) and (17). Then if , a valid and more optimal path is found. Update the parent by , , ; recalculate and . Otherwise, do nothing.
- (d)
- If does not meet the above conditions or , do nothing.
- Step 4: Loop. Repeat Step 2 and Step 3 until or .
- Step 5: Return Result. When , the destination is reached. Backtrack from the destination to the starting node using the parent of each node to generate the optimal path . When and no path to the destination is found, it indicates that there is no path from the start point to the destination.
5. Evaluation
5.1. Evaluation Environment
- (1)
- D3QN. The multi-step dueling Double Deep Q-Network (DDQN), which is a state-of-the-art and representative improved algorithm of DDQN in the field of DRL.
- (2)
- Traditional A*. This is introduced in Section 4.2. This algorithm will utilize the navigation model constructed in Section 4.1 for pathfinding.
- (3)
- UAVRM-A*. The improved A*-based algorithm proposed in this paper. The principle has been introduced in Section 4.3.
- (4)
- 2D. This is the valid theoretically optimal path that can be achieved when flying at a constant height. This approach necessitates specific conditions or assumptions.
- (5)
- Direct. This is the valid theoretically optimal path under idealized conditions, disregarding radio outage durations and utilizing only the Euclidean distance as the edge weight, serving as the most ideal scenario in path planning.
5.2. Evaluation Result
6. Conclusions
- Multi-UAV Path Planning: The algorithm proposed in this paper is designed solely for single-UAV scenarios. In practical dense urban environments, however, multiple UAVs may operate concurrently, potentially requiring cooperative flight. Hence, future algorithms should not only optimize individual paths but also guarantee spatio-temporal conflict-free paths for multiple UAVs. Furthermore, formation flying strategies might be incorporated during cooperative operations to enhance overall system performance.
- Real-time Replanning in Dynamic Environments: This research primarily investigates static path planning. In reality, dynamic obstacles necessitate UAV capabilities for obstacle detection and dynamic path regeneration. Additionally, while the A* algorithm excels in static path planning within discretized spaces, it faces significant challenges in dynamic path planning scenarios.
- Comprehensive Optimization Integrating UAV Energy Consumption Models: Actual UAVs incur higher energy consumption during maneuvers such as turns and altitude changes, resulting in non-uniform energy usage even under constant velocity conditions. The proposed algorithm does not explicitly incorporate energy consumption. Integrating UAV energy consumption as a core optimization objective or embedding this constraint within the navigation model still remains a complex challenge for complex network-based approaches.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-Connected UAV: Potential, Challenges, and Promising Technologies. IEEE Wirel. Commun. 2019, 26, 120–127. [Google Scholar] [CrossRef]
- Okumura, Y. Field Strength and Its Variability in VHF and UHF Land-Mobile Radio Service. Rev. Electr. Commun. Lab. 1968, 16, 825–873. [Google Scholar]
- Hata, M. Empirical Formula for Propagation Loss in Land Mobile Radio Services. IEEE Trans. Veh. Technol. 1980, 29, 317–325. [Google Scholar] [CrossRef]
- Cichon, D.J.; Kürner, T. Digital Mobile Radio Towards Future Generation Systems: Cost 231 Final Report. In European Cooperation in the Field of Scientific and Technical Research—Action 231; Technical Report; European Cooperation in Science and Technology (COST): Brussels, Belgium, 1993. [Google Scholar]
- Phillips, C.; Sicker, D.; Grunwald, D. Bounding the Error of Path Loss Models. In Proceedings of the 2011 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Aachen, Germany, 3–6 May 2011; pp. 71–82. [Google Scholar]
- Tao, Y.; Zhao, L. A Novel System for WiFi Radio Map Automatic Adaptation and Indoor Positioning. IEEE Trans. Veh. Technol. 2018, 67, 10683–10692. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, R. A Spatiotemporal Approach for Secure Crowdsourced Radio Environment Map Construction. IEEE/ACM Trans. Netw. 2020, 28, 1790–1803. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S.; Zhang, J.; Periaswamy, S.C.G.; Patton, J. Indoor Radio Map Construction and Localization with Deep Gaussian Processes. IEEE Internet Things J. 2020, 7, 11238–11249. [Google Scholar] [CrossRef]
- Sato, K.; Fujii, T. Kriging-Based Interference Power Constraint: Integrated Design of the Radio Environment Map and Transmission Power. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 13–25. [Google Scholar] [CrossRef]
- Ayadi, M.; Ben Zineb, A.; Tabbane, S. A UHF Path Loss Model Using Learning Machine for Heterogeneous Networks. IEEE Trans. Antennas Propag. 2017, 65, 3675–3683. [Google Scholar] [CrossRef]
- Sotiroudis, S.P.; Goudos, S.K.; Gotsis, K.A.; Siakavara, K.; Sahalos, J.N. Application of a Composite Differential Evolution Algorithm in Optimal Neural Network Design for Propagation Path-Loss Prediction in Mobile Communication Systems. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 364–367. [Google Scholar] [CrossRef]
- Sato, K.; Suto, K.; Inage, K.; Adachi, K.; Fujii, T. Space-Frequency-Interpolated Radio Map. IEEE Trans. Veh. Technol. 2021, 70, 714–725. [Google Scholar] [CrossRef]
- Katagiri, K.; Sato, K.; Fujii, T. Crowdsourcing-Assisted Radio Environment Maps for V2V Communication Systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Katagiri, K.; Fujii, T. Radio Environment Map Updating Procedure Based on Hypothesis Testing. In Proceedings of the 2019 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Newark, NJ, USA, 11–14 November 2019; pp. 1–6. [Google Scholar]
- Wu, Q.; Shen, F.; Wang, Z.; Ding, G. 3D Spectrum Mapping Based on ROI-Driven UAV Deployment. IEEE Netw. 2020, 34, 24–31. [Google Scholar] [CrossRef]
- An, S.; Yu, R. Review on Complex Network Theory Research. Comput. Syst. Appl. 2020, 29, 26–31. [Google Scholar]
- Bulut, E.; Guevenc, I. Trajectory Optimization for Cellular-Connected UAVs with Disconnectivity Constraint. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine Learning for Wireless Connectivity and Security of Cellular-Connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Tovar, E.; Guizani, M. Deep Reinforcement Learning for Real-Time Trajectory Planning in UAV Networks. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 958–963. [Google Scholar]
- Cai, Y.; Zhang, E.; Qi, Y.; Lu, L. A Review of Research on the Application of Deep Reinforcement Learning in Unmanned Aerial Vehicle Resource Allocation and Trajectory Planning. In Proceedings of the 2022 4th International Conference on Machine Learning, Big Data and Business Intelligence (MLBDBI), Shanghai, China, 28–30 October 2022; pp. 238–241. [Google Scholar]
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Nallanathan, A. Deep Reinforcement Learning Based Dynamic Trajectory Control for UAV-Assisted Mobile Edge Computing. IEEE Trans. Mob. Comput. 2022, 21, 3536–3550. [Google Scholar] [CrossRef]
- Song, Z.; Ma, C.; Ding, M.; Yang, H.H.; Qian, Y.; Zhou, X. Personalized Federated Deep Reinforcement Learning-Based Trajectory Optimization for Multi-UAV Assisted Edge Computing. In Proceedings of the 2023 IEEE/CIC International Conference on Communications in China (ICCC), Dalian, China, 10–12 August 2023; pp. 1–6. [Google Scholar]
- Betalo, M.L.; Leng, S.; Abishu, H.N.; Seid, A.M.; Fakirah, M.; Erbad, A.; Guizani, M. Multi-Agent DRL-Based Energy Harvesting for Freshness of Data in UAV-Assisted Wireless Sensor Networks. IEEE Trans. Netw. Serv. Manag. 2024, 21, 6527–6541. [Google Scholar] [CrossRef]
- Betalo, M.L.; Leng, S.; Mohammed Seid, A.; Nahom Abishu, H.; Erbad, A.; Bai, X. Dynamic Charging and Path Planning for UAV-Powered Rechargeable WSNs Using Multi-Agent Deep Reinforcement Learning. IEEE Trans. Autom. Sci. Eng. 2025, 22, 15610–15626. [Google Scholar] [CrossRef]
- Esrafilian, O.; Gangula, R.; Gesbert, D. 3D-Map Assisted UAV Trajectory Design Under Cellular Connectivity Constraints. In Proceedings of the ICC 2020-2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Zeng, Y.; Xu, X.; Jin, S.; Zhang, R. Simultaneous Navigation and Radio Mapping for Cellular-Connected UAV with Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2021, 20, 4205–4220. [Google Scholar] [CrossRef]
- Hao, Q.; Huang, H.; Zhao, H.; Tan, Y.; Zhu, C. Online Path Planning of Cellular-Connected UAVs Based on Radio Map Reconstruction. Mob. Commun. 2023, 47, 8–14. [Google Scholar]
- He, Z.; Zhao, L. The Comparison of Four UAV Path Planning Algorithms Based on Geometry Search Algorithm. In Proceedings of the 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2017; Volume 2, pp. 33–36. [Google Scholar]
- Zammit, C.; Van Kampen, E.J. Comparison Between A* and RRT Algorithms for 3D UAV Path Planning. Unmanned Syst. 2022, 10, 129–146. [Google Scholar] [CrossRef]
- Ju, C.; Luo, Q.; Yan, X. Path Planning Using an Improved A-Star Algorithm. In Proceedings of the 2020 11th International Conference on Prognostics and System Health Management (PHM-2020), Jinan, China, 23–25 October 2020; pp. 23–26. [Google Scholar]
- Li, S.; Zheng, Y.; Lv, N.; Li, S.; Qi, Y. Smooth Path Planning Based on Directed Search A* Algorithm. J. Dalian Jiaotong Univ. 2022, 43, 103–108. [Google Scholar]
- Zhang, W.; Li, J.; Yu, W.; Ding, P.; Wang, J.; Zhang, X. Algorithm for UAV Path Planning in High Obstacle Density Environments: RFA-Star. Front. Plant Sci. 2024, 15, 1391628. [Google Scholar] [CrossRef]
- Bai, X.; Ye, Y.; Zhang, B.; Ge, S.S. Efficient Package Delivery Task Assignment for Truck and High Capacity Drone. IEEE Trans. Intell. Transp. Syst. 2023, 24, 13422–13435. [Google Scholar] [CrossRef]
- Gu, Z.; Liu, Y.; Sun, W.; Yue, G.; Sun, S. UAV Dynamic Route Planning Algorithm Based on RRT. Comput. Sci. 2023, 50, 65–69. [Google Scholar]
- Zhao, Y.; Liu, K.; Lu, G.; Hu, Y.; Yuan, S. Path Planning of UAV Delivery Based on Improved APF-RRT* Algorithm. J. Phys. Conf. Ser. 2020, 1624, 042004. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, Y.; Zhang, R. Cellular-Enabled UAV Communication: A Connectivity-Constrained Trajectory Optimization Perspective. IEEE Trans. Commun. 2019, 67, 2580–2604. [Google Scholar] [CrossRef]
- Yang, D.; Dan, Q.; Xiao, L.; Liu, C.; Cuthbert, L. An Efficient Trajectory Planning for Cellular-Connected UAV under the Connectivity Constraint. China Commun. 2021, 18, 136–151. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, D.; Xiao, L.; Wu, F.; Xu, Y. Optimal Trajectory Design for Unmanned Aerial Vehicle Cargo Pickup and Delivery System Based on Radio Map. IEEE Trans. Veh. Technol. 2024, 73, 11706–11718. [Google Scholar] [CrossRef]
- Carrese, S.; D’Andreagiovanni, F.; Nardin, A.; Giacchetti, T.; Zamberlan, L. Seek & Beautify: Integrating UAVs in the Optimal Beautification of e-Scooter Sharing Fleets. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 1–6. [Google Scholar]
- Chu, H.; Yi, J.; Yang, F. Chaos Particle Swarm Optimization Enhancement Algorithm for UAV Safe Path Planning. Appl. Sci. 2022, 12, 8977. [Google Scholar] [CrossRef]
- 3GPP. Study on 3D Channel Model for LTE (Release 12) V12.7.0; Technical Report; Rep. TR 36.873; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Chai, Y.; Siu, K.-M.; Wang, Y.; Yang, X.; Im, S.-K. A Complex Network Model Based on Radio Map for Navigation of Cellular Connected UAV. In Proceedings of the 2023 9th International Conference on Communication and Information Processing (ICCIP), Lingshui, China, 14–16 December 2023; pp. 318–325. [Google Scholar]
- Xie, H.; Yang, D.; Xiao, L.; Lyu, J. Connectivity-Aware 3D UAV Path Design with Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2021, 70, 13022–13034. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Description |
|---|---|
| The identifier of node , used to distinguish between nodes. | |
| The attribute set of , storing associated attribute information. | |
| The attribute set of node , storing associated attribute information. | |
| The set of all node identifiers, . | |
| The set of all node attribute sets, . | |
| A directed edge . Note that two nodes can be connected by two edges , in opposite directions. | |
| The identifier of edge , indicating its direction from to . | |
| The attribute set of edge , storing associated attribute information, including but not limited to the weight. | |
| The set of all edge identifiers, . | |
| The set of all edge attribute sets, . |
| Method | Average Flight Time (s) | Average Outage Time (s) | Average Obstacle Collisions | Average Sharp Turns | Average Modeling Time (s) | Average Pathfinding Time (s) |
|---|---|---|---|---|---|---|
| D3QN | 90.60 | 15.52 | 0.00 | 10.00 | 162,101.77 | 250.87 |
| Traditional A* | 95.25 | 8.45 | 0.00 | 3.75 | 2.19 | 0.07 |
| UAVRM-A* | 94.71 | 8.61 | 0.00 | 0.00 | 2.31 | 0.15 |
| 2D | 99.35 | 5.74 | 0.00 | 0.00 | Not applicable | Not applicable |
| Direct | 56.56 | 27.18 | 0.00 | 0.00 | Not applicable | Not applicable |
| Method | Average Flight Time (s) | Average Outage Time (s) | Average Obstacle Collisions | Average Sharp Turns | Average Modeling Time (s) | Average Pathfinding Time (s) |
|---|---|---|---|---|---|---|
| D3QN | 92.32 | 11.01 | 0.00 | 8.00 | 166,739.22 | 323.86 |
| Traditional A* | 87.64 | 7.97 | 2.10 | 0.65 | 2.19 | 0.02 |
| UAVRM-A* | 88.37 | 8.03 | 0.00 | 0.00 | 2.26 | 0.04 |
| 2D | 88.42 | 8.32 | 0.00 | 0.00 | Not applicable | Not applicable |
| Direct | 59.49 | 24.26 | 0.00 | 0.00 | Not applicable | Not applicable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chai, Y.; Wang, Y.; Yang, X.; Im, S.-K.; He, Q. UAVRM-A*: A Complex Network and 3D Radio Map-Based Algorithm for Optimizing Cellular-Connected UAV Path Planning. Sensors 2025, 25, 4052. https://doi.org/10.3390/s25134052
Chai Y, Wang Y, Yang X, Im S-K, He Q. UAVRM-A*: A Complex Network and 3D Radio Map-Based Algorithm for Optimizing Cellular-Connected UAV Path Planning. Sensors. 2025; 25(13):4052. https://doi.org/10.3390/s25134052
Chicago/Turabian StyleChai, Yanming, Yapeng Wang, Xu Yang, Sio-Kei Im, and Qibin He. 2025. "UAVRM-A*: A Complex Network and 3D Radio Map-Based Algorithm for Optimizing Cellular-Connected UAV Path Planning" Sensors 25, no. 13: 4052. https://doi.org/10.3390/s25134052
APA StyleChai, Y., Wang, Y., Yang, X., Im, S.-K., & He, Q. (2025). UAVRM-A*: A Complex Network and 3D Radio Map-Based Algorithm for Optimizing Cellular-Connected UAV Path Planning. Sensors, 25(13), 4052. https://doi.org/10.3390/s25134052