1. Introduction
Deafness or hearing loss is the partial or total loss of the ability to hear sounds in one or both ears. The World Health Organization’s most recent World Hearing Report [
1] estimates that more than 1.5 billion people have some degree of hearing loss. Approximately 430 million of them have moderate or greater hearing loss in their better ear; this number is expected to increase to 700 million people by 2050.
According to the Ministry of Health [
2], approximately 2.3 million people in Mexico have hearing disabilities. This vulnerable group faces significant levels of discrimination and limited employment opportunities. Additionally, this health condition restricts access to education, healthcare, and legal services, further exacerbating social inequalities and limiting opportunities for integration. One of the primary challenges faced by the deaf community is communication with hearing individuals, as linguistic differences hinder social and workplace interactions. While technology has proven useful in reducing some of these barriers, deaf individuals often rely on the same technological tools as the hearing population, such as email and text messaging applications. However, these tools are not always effective, as not all deaf individuals are proficient in written Spanish.
In the Americas, the most widely studied sign languages are American Sign Language (ASL) and Brazilian Sign Language (LIBRAS), which have facilitated research and technological advancements aimed at improving communication with the deaf community. An example of one innovation is SLAIT [
3], a startup that emerged from a research project at Aachen University of Applied Sciences in Germany. During this research, an ASL recognition engine was developed using MediaPipe and recurrent neural networks (RNNs). Similarly, Ref. [
4] announced an innovative project in Brazil that uses computer vision and artificial intelligence to translate LIBRAS into text and speech in real time. Although this technology is still undergoing internal testing, the developers claim that after four years of work, the system has reached a significant level of maturity. This technology was developed by Lenovo researchers in collaboration with the Center for Advanced Studies and Systems in Recife (CESAR), which has already patented part of this technology [
5]. The system is capable of recognizing the positions of arm joints, fingers, and specific points on the face, similar to SLAIT. From this data, it processes facial movements and gestures, enabling the identification of sentence flow and the conversion of sign language into text. CESAR and Lenovo believe that their system has the potential to become a universally applicable tool.
Compared to speech recognition and text translation systems, applications dedicated to sign language (SL) translation remain scarce. This is partly due to the relatively new nature of the field and the inherent complexity of sign language recognition (SLR), which involves visual, spatial, and gestural elements. Recognizing sign language presents a significant challenge, primarily due to limited research and funding. This highlights the importance of promoting research into the development of digital solutions that enhance the quality of life for the deaf community (c.f. [
6]). However, researchers agree that the key factor for developing successful machine learning models is data (c.f. [
7]). In this regard, for SLs like LSM, existing databases are often inadequate in terms of both size and quality, hindering the advancement of these technologies. Also, sensing technology has a fundamental role in the reliability of incoming data. This is the main reason why SLR is broadly divided into two branches, i.e., contact sensing and contactless sensing.
Sign data acquisition with contact relies on gloves [
8], armbands [
9], wearable inertial sensors [
10,
11], or electromyographic (EMG) signals [
12]. In contrast, contactless sign data acquisition is mainly divided into two types, depending on the kind of hardware, that is, simple hardware (color or infrared cameras) or specialized hardware (e.g., depth sensors, optical 3D sensors [
13], commercial WiFi devices [
14], and ultrasonic devices [
15]).
This classification is similar to the one presented by [
16] (Figure 1), except that their sign data acquisition approaches are divided into sensor-based approaches and vision-based approaches. We present several examples of sign language research and related work, along with various approaches to sign data acquisition, as detailed in
Table 1.
In
Table 1, we include information regarding the features of signs that are included in the sign data acquisition for each reported work. Instead of using the separation employed by [
17] (facial, body, and hand features), we propose our own decomposition into hand configurations (HCs), arm movements (AMs), and non-hand gestures (NHGs); see
Figure 1. This is a fundamental concept of our research, so this decomposition is discussed in more detail in
Section 1.1.2. The separation of facial, body, and hand features is a concept commonly seen in pose estimators (such as MediaPipe [
18]), which are also common in SL research, as presented in
Table 1. It is also possible to observe that most SL research is focused on the HC features.
We will now present the scientific context of LSM research. First, we present the known datasets and then present studies about LSM recognition and analysis.
LSM is composed of two parts, i.e., dactylology (fingerspelling) and ideograms ([
19], p. 12). Dactylology is a small subset of LSM and basically consists of letters of the alphabet, where most parts are static signs. A few signs for numbers are also static. Due to the small, nevertheless important, role of dactylology, we are interested in LSM ideogram datasets. To the best of our knowledge, there are three publicly available ideogram-focused datasets. Two of them are visual, i.e., (i) the MX-ITESO-100 preview [
20], which contains video clips of 11 signs from 3 signers (out of 100 signs, although not all are currently available), and (ii) the Mexican Sign Language dataset [
21,
22], which includes image sequences of 249 signs from 11 signers. The third dataset, consisting of keypoints, is provided by [
23]; this dataset contains 3000 samples of 30 signs from 4 signers (8 letters, 20 words, and 2 phrases). This was constructed by processing the RGBD data into keypoints by means of the MediaPipe [
18] tool, but the unprocessed visual data is not provided. A comparison of these datasets, along with LSM glossaries, is provided in
Table 2 and
Table 3.
Table 1.
Sign language research and related work.
Table 1.
Sign language research and related work.
| Ref. | SL | Sign Group * | Sign Type | Sign Features † | Sensor/Tool |
|---|
| Yao et al. (2025) [24] | ASL | L, N, P | Static | HC | Hydrogel strain sensor |
| Chiradeja et al. (2025) [8] | - | S | Dynamic | HC | Gloves |
| Rodríguez-Tapia et al. (2019) [10] | ASL | W | Dynamic | HC | Myoelectric bracelets |
| Filipowska et al. (2024) [12] | PJM | W | Dynamic | HC | EMG |
| Umut and Kumdereli (2024) [9] | TSL | W | Dynamic | HC, AM | Myo armbands (IMU + sEMG) |
| Gu et al. (2024) [11] | ASL | W, S | Dynamic | HC, AM | IMUs |
| Wei et al. (2025) [25] | - | W | Dynamic | HC | Gloves |
| Wang et al. (2025) [26] | ASL | L | Both | HC | Triboelectric sensor |
| Urrea et al. (2023) [27] | ASL | L, W | Static | HC | Camera/MediaPipe |
| Al-Saidi et al. (2024) [16] | ArSL | L | Static | HC | Camera/MediaPipe |
| Niu (2025) [28] | ASL | L | Static | HC | Camera |
| Hao et al. (2020) [14] | - | W | Dynamic | HC | WiFi |
| Galván-Ruiz et al. (2023) [13] | LSE | W | Dynamic | HC | Leap motion |
| Wang et al. (2023) [15] | CSL | W, P | Dynamic | HC | Ultrasonic |
| Raihan et al. (2024) [29] | BdSL | L, N, W, P | Dynamic | HC | Kinect |
| Woods and Rana (2023) [30] | ASL | W | Dynamic | AM, NHG | Camera/OpenPose |
| Eunice et al. (2023) [31] | ASL | W | Dynamic | HC, AM, NHG | Camera/Sign2Pose, YOLOv3 |
| Gao et al. (2024) [17] | ASL, TSL | W | Dynamic | HC, AM, NHG | Camera, Kinect |
| Kim and Baek (2023) [32] | DGS, KSL | W, S | Dynamic | HC, AM, NHG | Camera/AlphaPose |
| Boháček and Hrúz (2022) [33] | ASL, LSA | W | Dynamic | HC, AM, NHG | Camera/Vision API (Apple) |
| Cihan Camgöz et al. (2020) [34] | DGS | S | Dynamic | HC, AM, NHG | Camera |
| Miah et al. (2024) [35] | ASL, PSL, LSM | L, W, P | Dynamic | HC, AM, NHG | Camera/MediaPipe, OpenPose |
| Gil-Martín et al. (2023) [36] | LSE | L, N, W | Both | HC, AM, NHG | Virtual ‡ camera/MediaPipe |
| Villa-Monedero et al. (2023) [37] | LSE | L, N, W | Both | HC, AM, NHG | Virtual ‡ camera/MediaPipe |
| Current study | LSM | W, P | Dynamic | AM | Camera/YOLOv8 |
Figure 1.
Sign features: hand configuration (HC), arm movement (AM), and non-hand gesture (NHG). “Surprise!” sign images were taken from screenshots of the corresponding YouTube video of the GDLSM [
38]; see
Appendix A.
Figure 1.
Sign features: hand configuration (HC), arm movement (AM), and non-hand gesture (NHG). “Surprise!” sign images were taken from screenshots of the corresponding YouTube video of the GDLSM [
38]; see
Appendix A.
Table 2.
LSM datasets and glossaries.
Table 2.
LSM datasets and glossaries.
| Ref. | Type | Sign Group * | Sign Signal | Samples |
|---|
| DIELSEME 1 (2004) [39] | Glossary † | 535 W | Visual | 1 video per sign |
| DIELSEME 2 (2009) [40] | Glossary † | 285 W | Visual | 1 video per sign |
| GDLSM (2024) [38] | Glossary | 27 L, 49 N, 667 W, 4 P | Visual | 1 video per sign ‡ |
| MX-ITESO-100 (2023) [20] | Dataset | 96 W, 4 P | Visual | 50 videos per sign |
| Mexican Sign Language dataset (2024) [22] | Dataset | 243 W, 6 P | Visual | 11 image sequences per sign |
| Mexican Sign Language Recognition (2022) [23] | Dataset | 8 L, 21 W, 1 P | Keypoints | 100 samples per sign |
Table 3.
LSM datasets and glossaries: sign and signal properties.
Table 3.
LSM datasets and glossaries: sign and signal properties.
| Ref. | Sign Features | Signal Properties | File Format | Comments |
|---|
| DIELSEME 1 (2004) [39] | HC, AM *, NHG | 320 × 234 @ 12 fps | SWF videos | |
| DIELSEME 2 (2009) [40] | HC, AM, NHG | 720 × 405 @ 30 fps | FLV videos | |
| GDLSM (2024) [38] | HC, AM, NHG | 1920 × 1080 @ 60 fps | videos | Hosted on a streaming platform; c.f. Appendix A |
| MX-ITESO-100 (2023) [20] | HC, AM, NHG | 512 × 512 @ 30 fps | MP4 videos | Preview only ‡ |
| Mexican Sign Language dataset (2024) [22] | HC, AM * | 640 × 480 | JPEG images | Blurred faces |
| Mexican Sign Language Recognition (2022) [23] | HC, AM, NHG | 20 × 201 array | CSV files | One row per frame, 67 keypoints |
Regarding LSM studies, most of the SLR research on LSM mainly focuses on classifying static letters and numbers using classical machine learning techniques and convolutional neural networks (CNNs) [
42,
43,
44,
45,
46,
47,
48,
49]. Using the classification provided by [
16], there are four classes of signs: (i) continuous signs, (ii) isolated signs, (iii) letter signs, and (iv) number signs. In LSM, most of the signs in the last three categories are static signs. But signing in LSM is generally highly dynamic and continuous, since most signs are ideograms, as mentioned before.
In terms of dynamic sign recognition, early studies focused on classifying letters and numbers with motion. For example, Ref. [
50] used the CamShift algorithm to track the hand trajectory, generating a bitmap that captures the pixels of the hand path; these bitmaps were then classified using a CNN. Another approach, presented in [
51], involved obtaining the coordinates (
x,
y) of 22 keypoints of the hand using an Intel RealSense sensor, which were used as training data for a multilayer perceptron (MLP) neural network. Finally, in [
52], 3D body cue points obtained with MediaPipe were used to train two recurrent neural networks (RNNs), i.e., LSTM and GRU.
In more recent research, in addition to letters and numbers, some simple words and phrases were included. Studies such as Refs. [
53,
54,
55] used MLP-type neural networks, while others, such as Ref. [
23], used more advanced RNN models. In Ref. [
20], CNNs were used to extract features from the frames of a series of videos, which were then used as input to an LSTM model.
On the other hand, Ref. [
56] presented a method for dynamic sign classification that involves extracting a sequence of frames, followed by a segmentation process using neural networks based on color, resulting in the segmentation of the skin of the hands and face. To classify the signs, four classical machine learning algorithms are compared, i.e., Bayesian classifier, decision trees, SVM, and NN.
Although research on LSM recognition has been conducted for several years, progress in this area has been slow and limited compared to other SLs. A common approach is to use computer vision techniques such as CNNs to build automatic sign recognition systems. However, with the recent emergence of pose recognition models, such as MediaPipe and YOLOv8, there is a trend in both LSM and other sign languages to use these tools to train more complex models, such as RNNs, or more sophisticated architectures, such as Transformers. A comparison of the studies mentioned here, with additional details, is shown in
Table 4.
Table 4.
LSM research.
| Ref. | Sign Group * | Sign Type | Sign Feature | Sensor/Tool |
|---|
| Solís et al. (2016) [42] | L | Static | HC | Camera |
| Carmona-Arroyo et al. (2021) [43] | L | Static | HC | Leap Motion, Kinect |
| Salinas-Medina and Neme-Castillo (2021) [44] | L | Static | HC | Camera |
| Rios-Figueroa et al. (2022) [45] | L | Static | HC | Kinect |
| Morfín-Chávez et al. (2023) [46] | L | Static | HC | Camera/MediaPipe |
| Sánchez-Vicinaiz et al. (2024) [47] | L | Static | HC | Camera/MediaPipe |
| García-Gil et al. (2024) [48] | L | Static | HC | Camera/MediaPipe |
| Jimenez et al. (2017) [49] | L, N | Static | HC | Kinect |
| Martínez-Gutiérrez et al. (2019) [51] | L | Both | HC | RealSense f200 |
| Rodriguez et al. (2023) [52] | L, N | Both | HC | Camera/MediaPipe |
| Rodriguez et al. (2025) [57] | L, N | Both | HC | Camera/MediaPipe |
| Martinez-Seis et al. (2019) [50] | L | Both | AM | Camera |
| Mejía-Peréz et al. (2022) [23] | L, W | Both | HC, AM, NHG | OAK-D/MediaPipe |
| Sosa-Jiménez et al. (2022) [58] | L, N, W | Both | HC, body but not NHG | Kinect |
| Sosa-Jiménez et al. (2017) [53] | W, P | Dynamic | HC, AM | Kinect/Pose extraction |
| Varela-Santos et al. (2021) [59] | W | Dynamic | HC | Gloves |
| Espejel-Cabrera et al. (2021) [56] | W, P | Dynamic | HC | Camera |
| García-Bautista et al. (2017) [54] | W | Dynamic | AM | Kinect |
| Martínez-Guevara and Curiel (2024) [60] | W, P | Dynamic | AM | Camera/OpenPose |
| Martínez-Guevara et al. (2019) [61] | W | Dynamic | HC, AM | Camera |
| Trujillo-Romero and García-Bautista (2023) [55] | W, P | Dynamic | HC, AM | Kinect |
| Martínez-Guevara et al. (2023) [62] | W, P | Dynamic | HC, AM | Camera |
| Martínez-Sánchez et al. (2023) [20] | W | Dynamic | HC, AM, NHG | Camera |
| González-Rodríguez et al. (2024) [63] | P | Dynamic | HC, AM, NHG | Camera/MediaPipe |
| Miah et al. (2024) [35] | L, W, P | Dynamic | HC, AM, NHG | Camera/MediaPipe, OpenPose |
| Current study | W, P | Dynamic | AM | Camera/YOLOv8 |
1.1. Toward a Recognition System for LSM
We present the sign data acquisition, the hardware selected, and the fundamental concepts of our research toward a recognition system for LSM.
1.1.1. Contactless Sign Data Acquisition with Simple Hardware
Due to the socioeconomic conditions of the main users of LSM, this research uses contactless, simple hardware for sign data acquisition (i.e., a pure vision-based approach), since color cameras are widely accessible and available in portable devices, which are very common in Mexico. As presented in
Table 4, one important remark is that only one LSM research work [
59] used contact sensing for sign data acquisition.
1.1.2. Sign Features
From a linguistics perspective, LSM signs present six documented parameters, that is, basic articulatory parameters that simultaneously combine to form signs [
39,
64,
65,
66]. We propose a simplified Kinematics perspective, as shown in
Figure 1, which combines four of those parameters into arm movements (AMs):
Hand configuration (HC): The shape adopted by one or both hands. As seen in
Table 1 and
Table 3, most research focuses on HC only. Hand segmentation [
67] and hand pose detectors are very promising technologies for this feature. The number of HCs required to perform a sign is variable in LSM; some examples regarding the number of HCs required for a sign are as follows: number “1” (1 HC), number “9” (2 HCs), number “15” (2 hands, 1 HC), and “grandmother” (2 hands, 3 HCs). See
Appendix A for samples of these signs.
Non-hand gestures (NHGs): Facial expressions (frowning, raising eyebrows), gestures (puffing out cheeks, blowing), and body movements (pitching, nodding). While most signs do not require non-hand gestures, some LSM signs do. Some signs that require one or more NHGs are as follows: “How are you?”, “I’m sorry”, “Surprise!” (two NHGs of this sign are shown in
Figure 1). See
Appendix A for links to samples of these signs.
Arm movement (AM): This can be characterized by tracking the joint movements of wrists, shoulders, and elbows. It is enough to obtain the following basic articulatory parameters [
39,
64,
65,
66]:
- (a)
Articulation location: This is the location on the signer’s body or space where the signs are executed.
- (b)
Hand movement: The type of movement made by the joints from one point to another.
- (c)
Direction of movement: The trajectory followed by the hand when making the sign.
- (d)
Hand orientation: Orientation of the palm of one or both hands, with respect to the signer’s body when making the manual configuration.
This part can be studied from pose-based approaches (c.f. [
31,
32] with pose estimation using AlphaPose).
Other decompositions have been proposed to simplify sign analysis, such as in [
62] (Figure 1), where an LSM sign is decomposed into fixed postures and movements. We consider the fact that this approach could lose important information, as transitions in hand postures are also important (as documented in the Hamburg Notation System (
HamNoSys)) [
68].
The use of pose estimators, particularly MediaPipe, enables the extraction of facial, hand, and body features; c.f. [
17,
23]. The use of pose estimators is quite frequent in SL research, however, there are still areas for improvement (c.f. [
27] (Figure 8)), where a PhBFC was designed to improve MediaPipe hand pose estimation. Complementary approaches like bimodal frameworks [
17] highlight the current limitations of these estimators.
We believe that focusing on a single element to describe LSM is inadequate, given its meaning and contribution to the sign. But covering everything at the same time is also very complex, as seen in most LSM research. Since most of the LSM work focuses on HC, this paper focuses on the AM part and reports the approach created to analyze visual patterns in arm joint movements. Our current work uses YOLOv8 [
69,
70] for pose estimation. While it is a 2D method, and MediaPipe is better for 3D, we discuss our decision in
Appendix B.
The main contribution of this work involves the use of arm movement keypoints, particularly wrist positions, as a partial feature for sign language recognition. This is motivated by the observation in [
23], where wrist location played a crucial role in distinguishing similar signs. For instance, the same hand configuration used at different vertical positions (e.g., near the head to indicate a headache, or near the stomach to indicate a stomachache) conveys different meanings. By isolating and analyzing this spatial feature, we aim to better understand its discriminative power in sign recognition tasks.
This paper is structured as follows.
Section 2 describes the data acquisition, the experimental design and setup, the stages of the proposed approach for SLR, and the evaluation process and metrics.
Section 3 describes the results from the analysis of two case studies and presents a comparison of the proposed methodology against state-of-the-art works. The potential and the limitations of our approach are discussed in
Section 4. The conclusions of this work are presented in
Section 5.
2. Materials and Methods
This section describes the resources, tools, and procedures used in this study. First, the acquisition of a visual sign language dataset is presented, including a detailed description of its features. Next, the experimental design is introduced, indicating the experiments to be performed and their objectives. Then, the experimental setup involving the deep learning models and the computational resources employed is described. Afterward, the stages of our first-step sign language recognition system are explained. Lastly, a detailed explanation of motion shapes used in the experimentation and the evaluation metrics is provided.
2.1. Data Acquisition
In this research, a proprietary dataset was developed with the active participation of the deaf community and LSM experts, ensuring no restrictions on recognizing hand configurations, arm movements, and facial expressions. The creation of the dataset was reviewed and approved by the Bioethics Committee for Human Research at Cinvestav, and all participants provided written informed consent.
The dataset comprises 74 signs—73 performed by 17 subjects and 1 (“iron”) performed by 16 subjects. In total, we have 1257 color videos (900 × 720 @ 90 fps) for RGB data acquisition. We consider this dataset a visual sign signal dataset.
All signs show HCs and AM, and three of them have NHGs (“How?”, “How are you?”, “Why?”). There are four phrases in the dataset, as follows: “Good morning!” (“
¡Buenos días!”), “Good afternoon!” (“
¡Buenas tardes!”), “How are you?” (“
¿Cómo estás?”), and “Why?” (“
¿Por qué?”). The latter is a question word in English, but it is constructed with two words in Spanish and, in LSM, is represented by a sign composed of two signs with independent meanings. This information is summarized in
Table 5.
2.2. Experimental Design
Experiments were conducted on the custom dataset. The goal of these experiments was to classify dynamic LSM signs by detecting and tracking the wrist, elbow, and shoulder joints in order to characterize the AM. For this purpose, since sign production involves motion and changes in shape in space, we decided to use a pose-based approach to transform the visual sign signals into keypoint sign signals, and CNN for classification.
Two case studies are presented in this research. The first case only considers shoulders and wrists, as the wrists exhibit the predominant movement while the shoulders serve as base joints with minimal displacement. The second case includes the elbows, in addition to the shoulders and wrists, as the elbows also experience significant movement.
To carry out these analyses, three groups of signs were selected from the custom dataset. Each group was chosen based on specific characteristics. The first two subsets were selected based on signs with visually distinguishable motion patterns; in contrast, the third subset is composed of signs with variants to examine how this variability influences the classifier’s performance. More detailed information about these subsets is provided in
Section 2.5.
2.3. Experimental Setup
For the experimentation, a pose detector and a CNN classifier framework were required. To select a pose estimation framework, we conducted preliminary experiments to compare the commonly used MediaPipe (Google LLC, Mountain View, CA, USA) and the YOLOv8-pose (Ultralytics Inc., Frederick, MD, USA) detector. Based on this comparison, we chose YOLOv8-pose due to its superior performance. The details of this comparison, which support our decision, can be found in
Appendix B.
As YOLOv8-pose was selected for pose estimation, we used YOLOv8-cls (Ultralytics Inc., Frederick, MD, USA) to analyze visual patterns of the arm joint movements. Using a single technology for multiple tasks offers several advantages. For example, a unified architecture reduces the need for format adaptation between different models, simplifies implementation, and streamlines the workflow. Also, it reduces the possible problems of training and running multiple models across different frameworks.
A micromamba (QuantStack, Saint-Maur-des-Fossés, France) environment was employed for the installation and implementation of the pose detection and image classification models used in this work.
Table 6 provides a summary of the technical specifications of the components of the experimental setting.
2.4. Sign Language Recognition
This work represents a preliminary step toward a recognition system, which comprises a three-step process, as follows: (1) pose estimation, (2) shape generation, and (3) class prediction. A simplified diagram of this process is presented in
Figure 2.
In this setup, a video file is passed through a pose detector, where six keypoints are extracted for each frame and saved as a NumPy (NumFOCUS, Austin, TX, USA) array. These keypoints are then plotted to generate motion shapes, and the resulting images are used as input to a classification model. The classification model returns the top five predicted classes and their associated confidence score. Detailed descriptions of each stage in the process are provided in the following subsections.
2.4.1. Visual Sign Signals
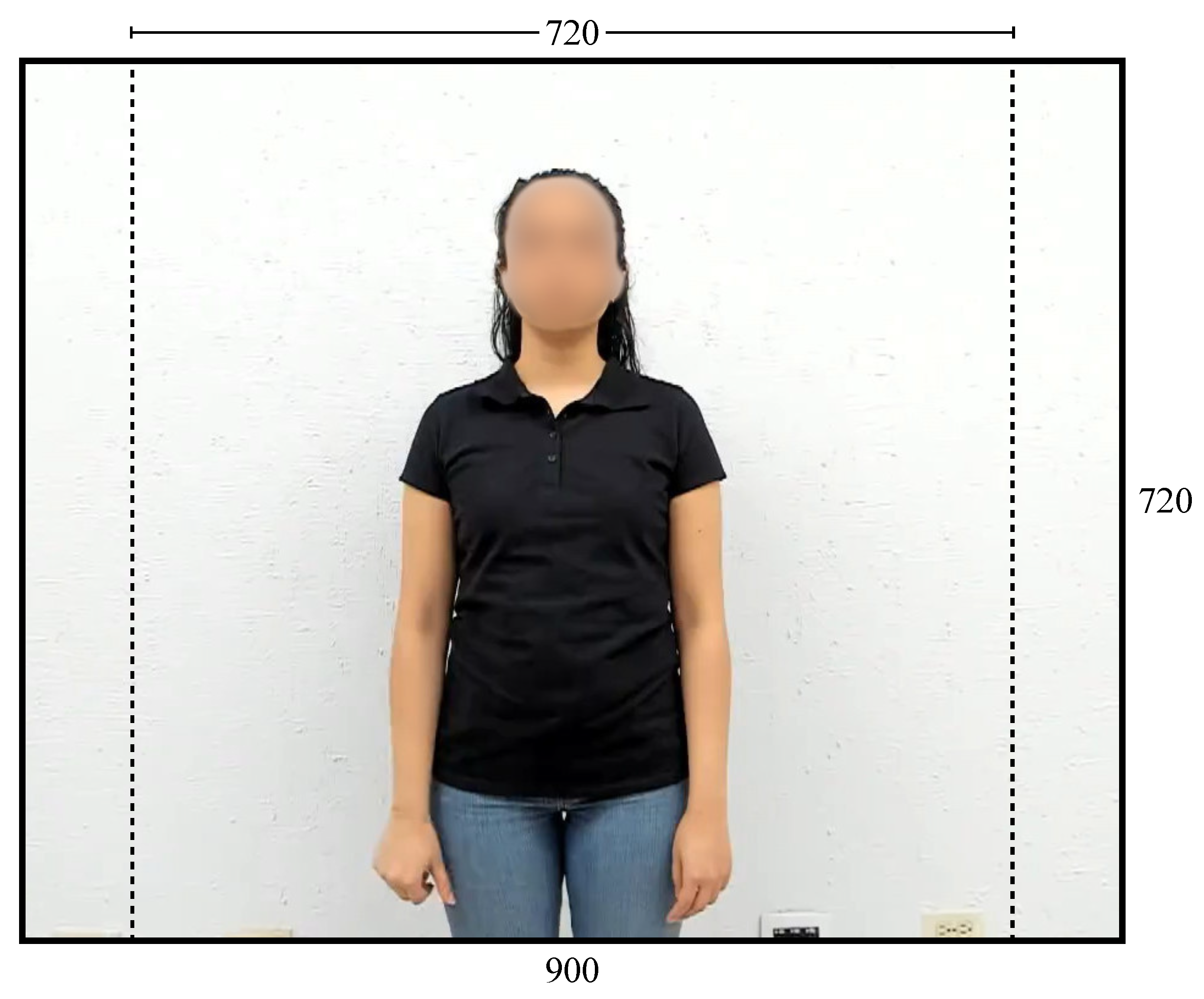
To process the visual information, the video frames were cropped to 720 × 720 pixels (see
Figure 3), as YOLOv8-pose operates internally on square images. This adjustment does not affect sign visibility, as all relevant joints remain within the square frame.
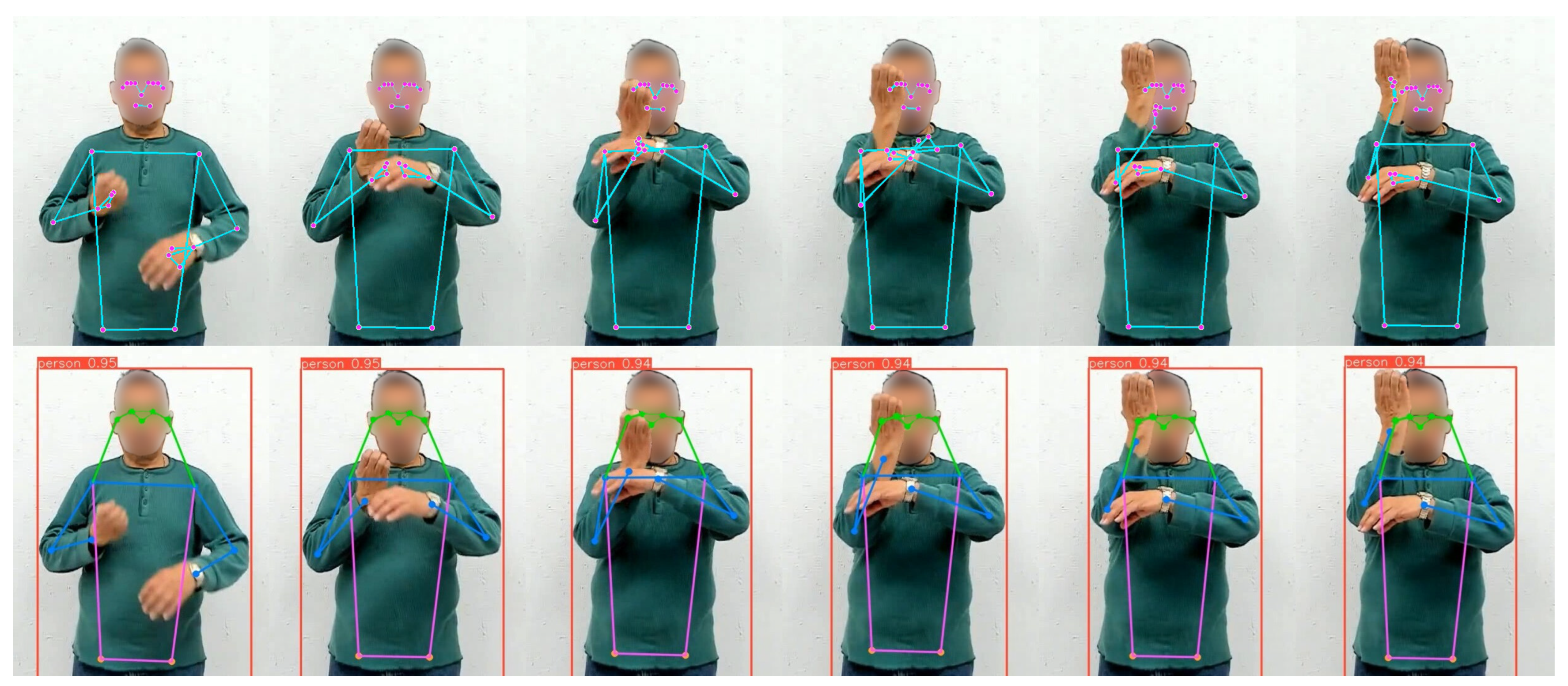
2.4.2. Pose Estimation
LSM specifies that only the upper part of the body is meaningful in signing; so from the 17 keypoints detected by the selected pose detector, only 13 corresponding to the upper body are relevant; the 4 keypoints for knees and ankles are discarded. If the model fails to detect a joint, it is assigned a null value, which allows for easily discarding these missing values in further processing. Below is an example of pose estimation applied to the initial and final poses of the “deer” sign (
Figure 4), as well as the extraction of the 13 keypoints.
The keypoints are stored in NPY format, a file type used by NumPy for efficiently storing data arrays. These arrays have dimensions of (13, 2, N): keypoints, 2D coordinates, and the number of frames in each video.
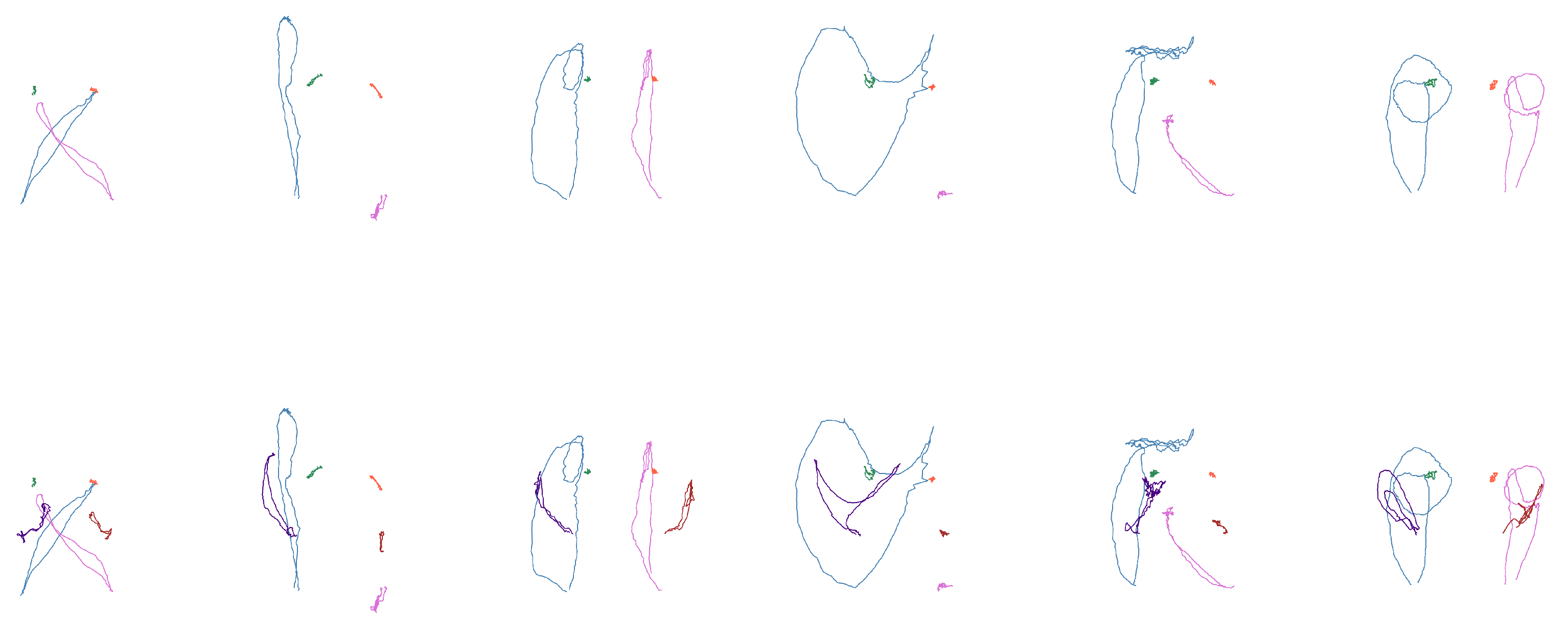
2.4.3. Shape Generation
From these arrays, the coordinates corresponding to the wrists, shoulders, and elbows are extracted according to each case study. The positions of these coordinates were plotted for each frame, illustrating the movement pattern of each joint, as shown in
Figure 5.
2.4.4. Classification
The shape classification stage involves assigning each image a label from a predefined set of classes. For this purpose, the YOLOv8x-cls model was employed. This classifier is the most robust of the YOLOv8 classification models and maintains a deep CNN structure. The classifier outputs the top-5 predicted class labels along with their associated confidence scores.
The maximum number of examples per sign in all selected sets is 17; 10 examples were used for training, 2 for validation, and 5 for the testing phase.
Table 7 shows the most relevant hyperparameters for model training and configuration. On the other hand,
Table 8 details the data augmentation-related hyperparameters handled by YOLOv8 (not all parameters are active).
2.5. Evaluation
Experimentation was conducted on the two case studies outlined in
Section 2.2, using three sets of motion shapes described below. The lists of signs in each subset are shown in
Table 9,
Table 10 and
Table 11The first subset consists of a small group of five signs, chosen for their distinguishable shapes based on a qualitative evaluation. The primary objective of this group is to conduct a more controlled evaluation of the neural network, which allows for a clearer analysis of what the network is learning in an environment with fewer variables. Examples of these signs are presented in
Figure 6, while the corresponding words are listed in
Table 9.
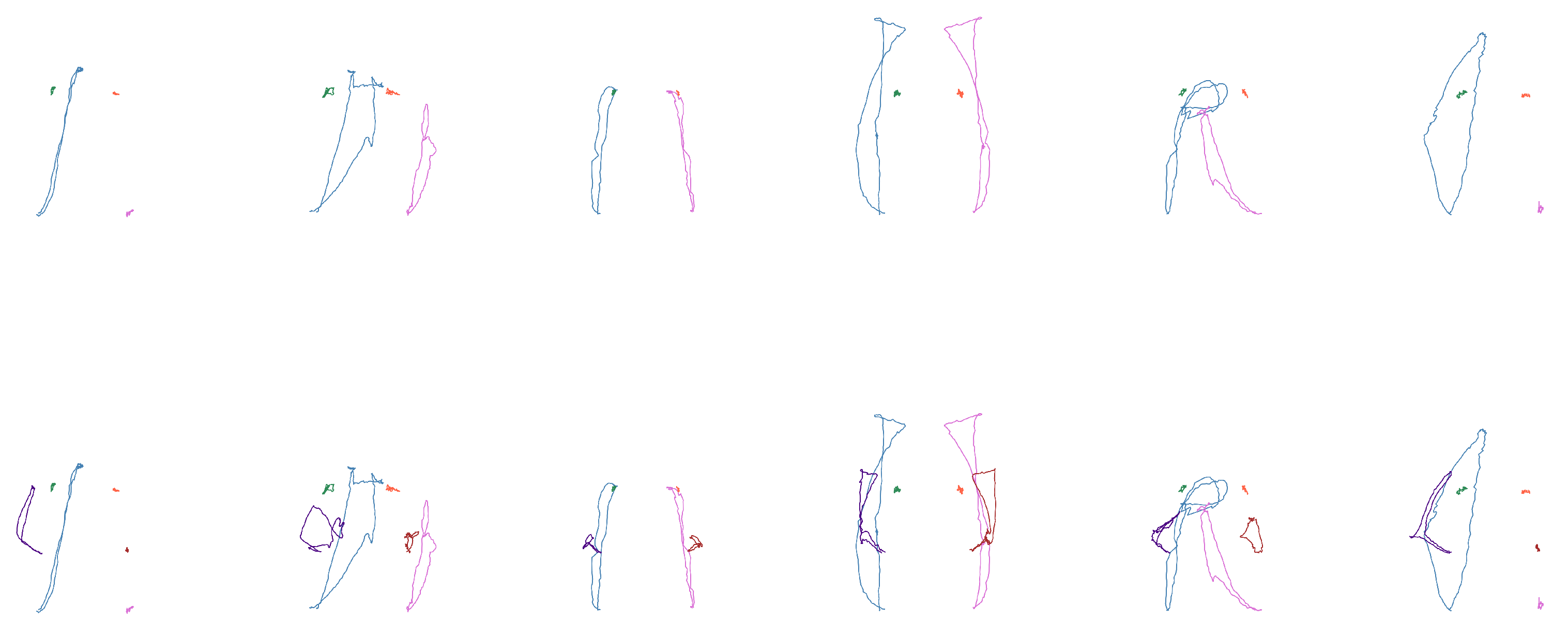
In the second subset, the signs are similarly distinguishable, but with a larger set consisting of 62 signs. The goal now is to assess whether the neural network’s behavior remains consistent with that of the first set, despite the increased number of classes. Some examples of these signs are presented in
Figure 7, and the corresponding words are listed in
Table 10.
The third subset consists of 16 words related to the semantic field of house. This group is particularly notable for the high number of variants in its signs. As such, this experiment aims to assess the model’s accuracy, as well as its ability to generalize and identify distinctive features within more complex sign language contexts. Examples of the sign forms from this set can be seen in
Figure 8, and the corresponding vocabulary is outlined in
Table 11.
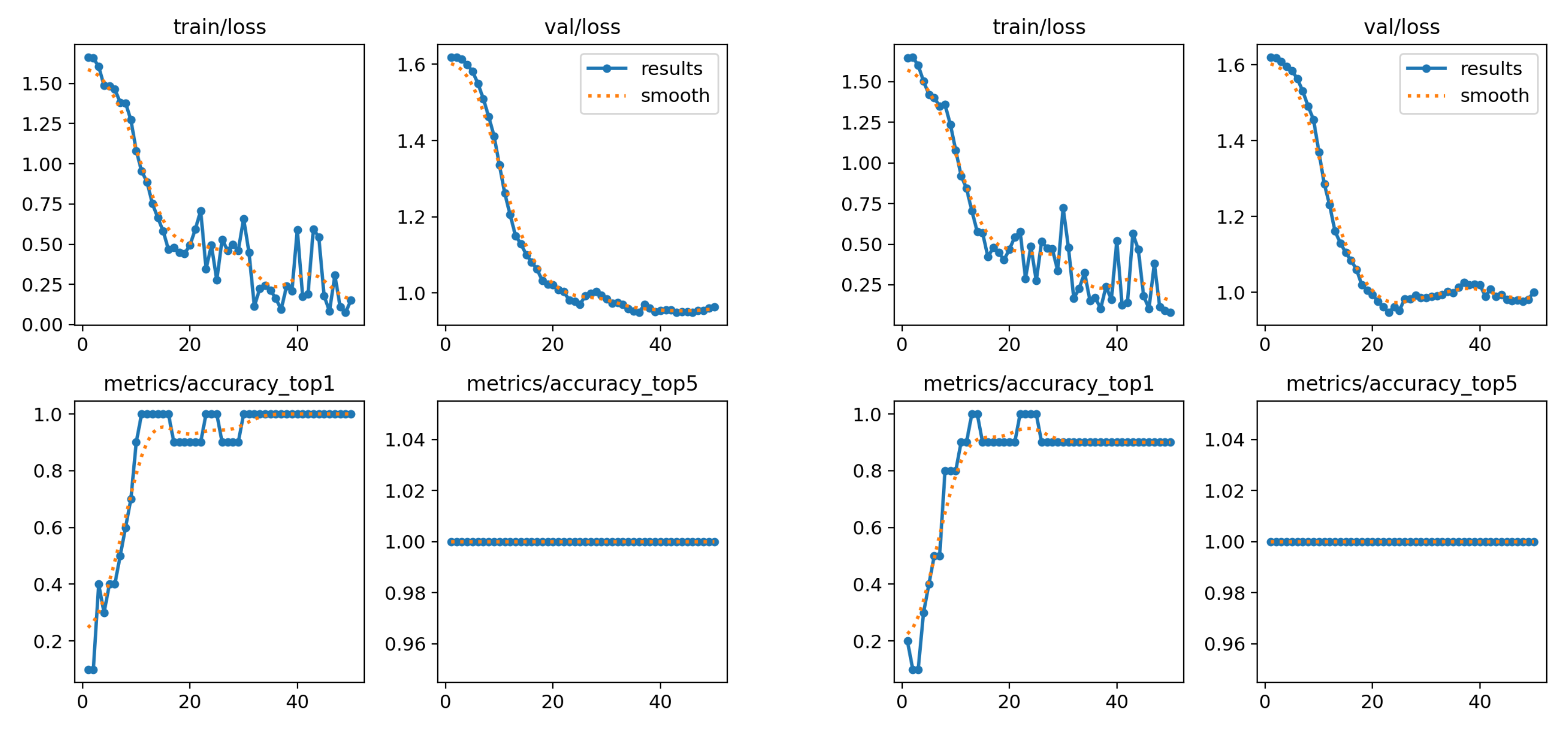
Once the training stage is completed, the corresponding weights are saved in a custom model, which is then utilized for the subsequent testing phase. During this phase, key performance metrics, such as top-1 and top-5 accuracies, are collected. Top-1 accuracy measures how often the model’s first prediction is correct, while top-5 accuracy evaluates whether the correct class appears among the five most probable predictions.
Top-1 accuracy is computed using the standard approach employed for most classification tasks. It is defined as the proportion of correctly predicted labels over the total number of samples. Let
be the predicted label for the
i-th sample and
the corresponding true label. The top-1 accuracy is then calculated as follows [
71]:
where
is the indicator function, which returns 1 if the prediction is correct and 0 otherwise.
On the other hand, the top-k accuracy considers a prediction correct if the true label is among the k-highest predicted scores. Thus, top-1 accuracy is a special case of top-k accuracy, where .
Let
represent the predicted class for the
i-th sample that has the
j-th highest predicted score, and let
be the corresponding true label. The top-k accuracy is then calculated as follows [
72]:
where
k is the number of top predictions considered, and
is the indicator function.
These metrics are crucial for assessing the model’s performance in a multi-class classification environment.
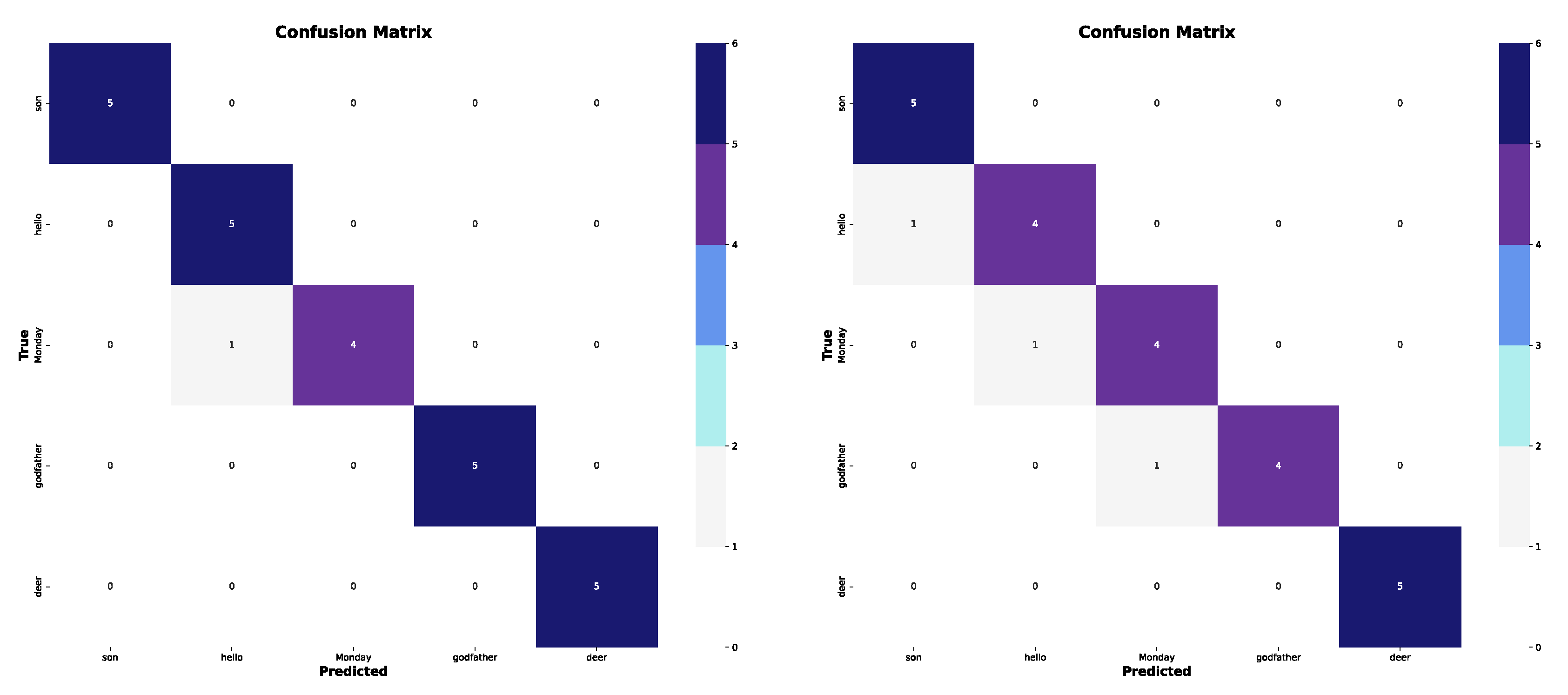
Additionally, a confusion matrix is generated for each experiment, providing a detailed overview of correct and incorrect predictions for each class. The results, along with their interpretation and analysis, are discussed in the following section.
4. Discussion
Table 13 presents the accuracy values based on the top-1 accuracy metric obtained using the YOLOv8x-cls model. The results indicate that including elbow coordinates led to better performance in two out of the three experiments. Although the improvement was modest (ranging from 3% to 4%), it suggests that incorporating additional joint information can contribute to more accurate classifications.
The experiments with various datasets allowed us to observe the behavior of the convolutional neural network (CNN) based on the input data. It became evident that the network’s performance is heavily influenced by the selection of classes. Using all available classes from the database is not always ideal, as this tends to yield suboptimal results. Therefore, a more focused approach, where only relevant classes are included, is recommended for improving model classification.
Despite certain limitations—such as the small number of examples per class, the presence of variants, and the high similarity between some signs—the neural network was still able to classify a significant number of signs correctly and recognize patterns in the movement data. This demonstrates the potential of the YOLOv8 model for this type of task.
Compared to other CNNs, YOLOv8 stands out due to its optimized architecture, which allows for the use of pre-trained models on large datasets like ImageNet. This enables the model to achieve high accuracy and efficiency, making it suitable for real-time applications. However, as with any model, performance is largely dependent on the quality and quantity of the input data. In this case, the limited number of examples (17 per class) restricts the network’s ability to achieve optimal accuracy.
These results highlight both the potential and the limitations of our approach. The experiments demonstrated that it is possible to classify a considerable number of signs, indicating that this dataset and strategy could serve as a useful tool for training a convolutional neural network (CNN), such as YOLOv8. However, the analysis also reveals that the current structure of the dataset—characterized by a limited number of examples, variants between classes, and high similarity among some signs—presents challenges that must be addressed through alternative approaches.
The comparison between the two case studies (with and without elbows) was intended to assess whether the inclusion of a greater number of keypoints improves the performance of the model. This seems to indicate that this assumption is correct. The next immediate step is to optimize these results, either by using a different convolutional neural network (CNN) or by exploring different architectures, such as recurrent neural networks (RNNs), but keeping the focus on the use of keypoints; i.e., using pose-based approaches.
Additionally, the study performed on the MSLR dataset showed good results for the proposed approach (with an accuracy of 85.78 % using 6 keypoints), compared to the extraordinary results obtained by [
23] (with accuracies of 96.44 % and 97.11 %) and [
35] (with accuracies of 99 % and 99.75 %) while using the complete keypoint sign signals in the dataset; see
Table 12. This is an interesting finding that shows the relevance of AM sign features, as most previous research studies typically focused on HC sign features.
5. Conclusions
This paper presents ongoing work toward the creation of a recognition system for LSM. A decomposition of sign features is proposed into HC, AM, and NHG. Contactless, simple hardware was used for sign signal acquisition. A custom proprietary dataset of 74 signs (70 words and 4 phrases) was constructed for this research. In contrast to most LSM research, this paper reports an analysis focused on the AM part of signs, rather than on HC-focused or holistic approaches (HC + AM + NHG).
The analysis was conducted through a series of classification experiments using YOLOv8, aimed at identifying visual patterns in the movement of key joints, i.e., wrists, shoulders, and elbows. A pose detection model was used to extract joint movements, followed by an image classification model (both integrated into YOLOv8) to classify the shapes generated by these movements.
These experiments are the first stage of a larger project. For now, we are focusing on the analysis of arm movement (shoulders, elbows, and wrists) because it is a less-studied feature, and information can be extracted from it using a relatively simple methodology.
Later, the goal will be to integrate other essential components of sign language, such as manual configuration and non-hand gestures, to develop a more complete system. Ultimately, this will support progress toward automatic sign language recognition.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}