
GRACE-FO Satellite Data Preprocessing Based on Residual Iterative Correction and Its Application to Gravity Field Inversion

Abstract
1. Introduction
2. Materials and Methods
2.1. Common Outlier Processing Methods
- 1.
- Threshold Selection:
- 2.
- Neighborhood Range Optimization:
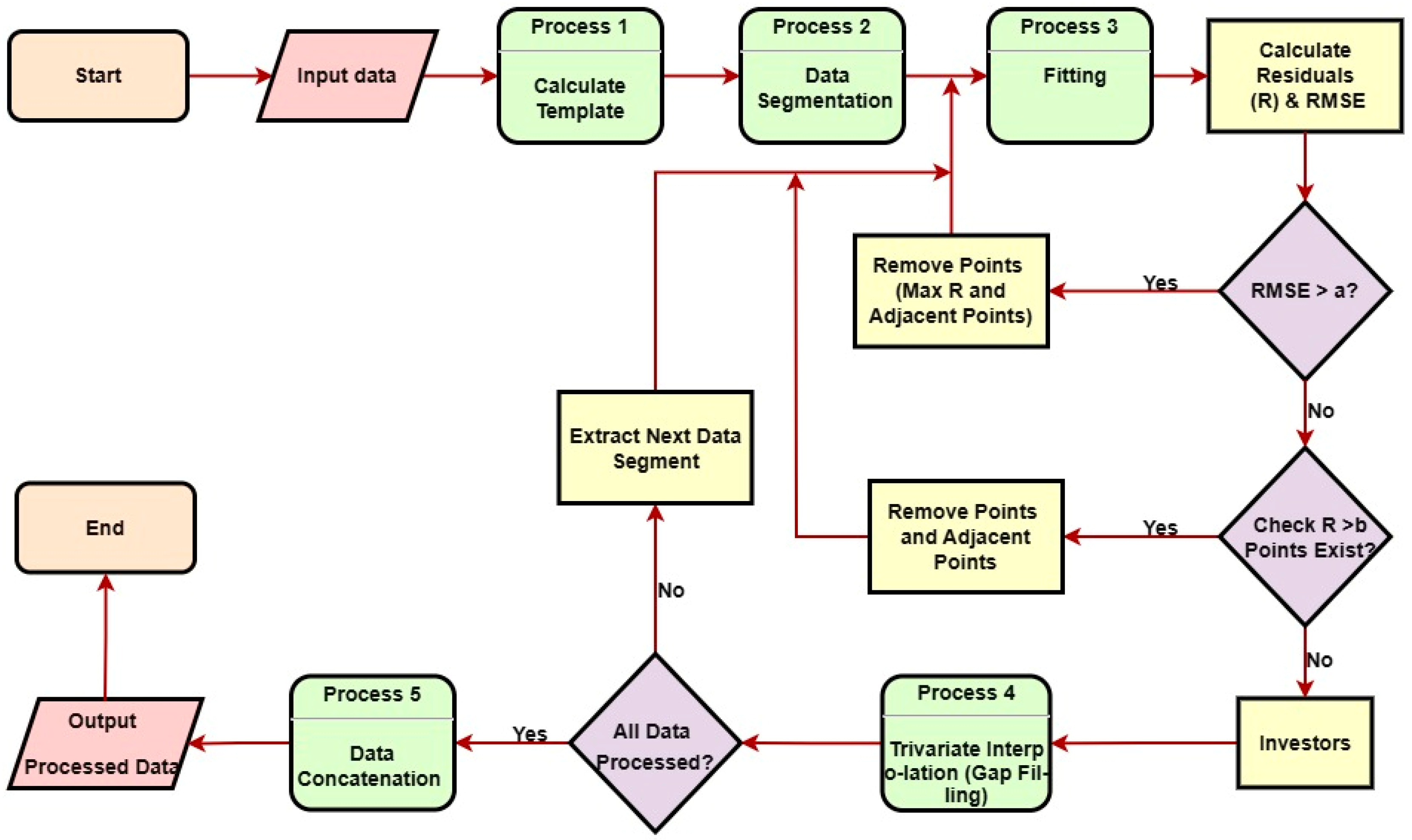
2.2. The Process of Data Preprocessing
2.3. Basic Principle of Energy Method Inversion
3. Experiments and Analysis
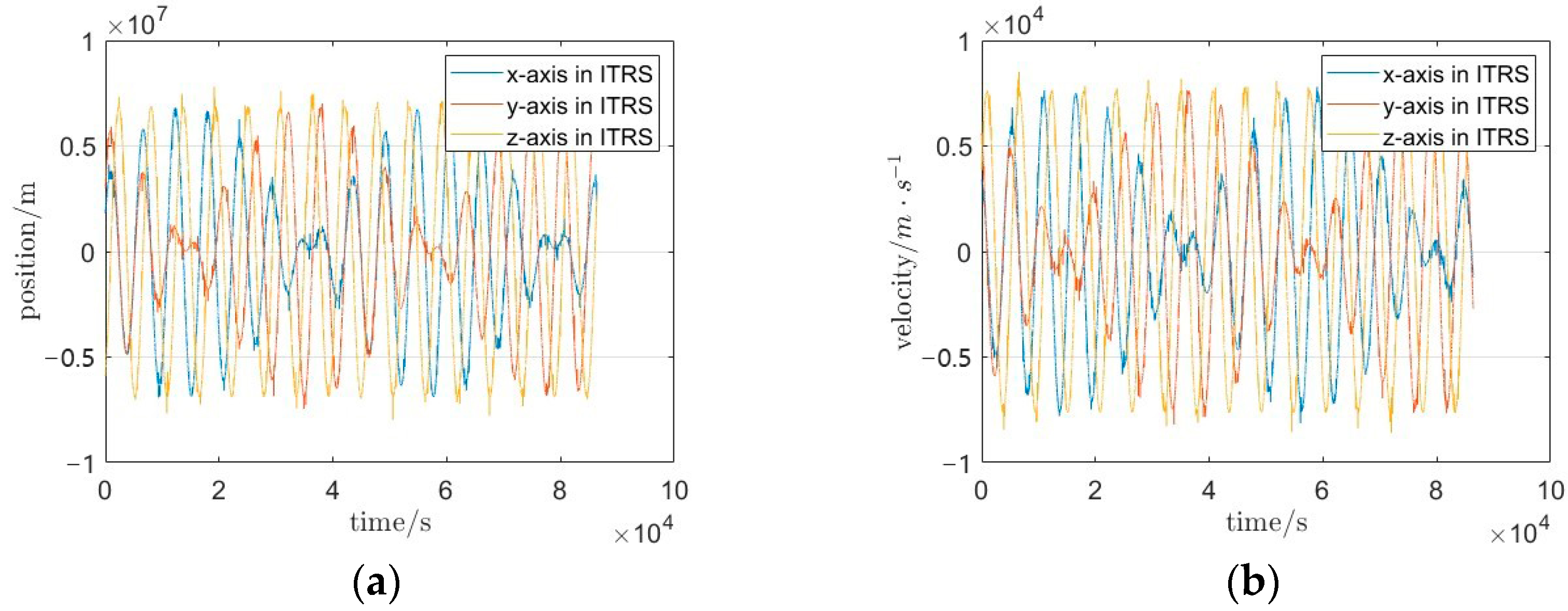
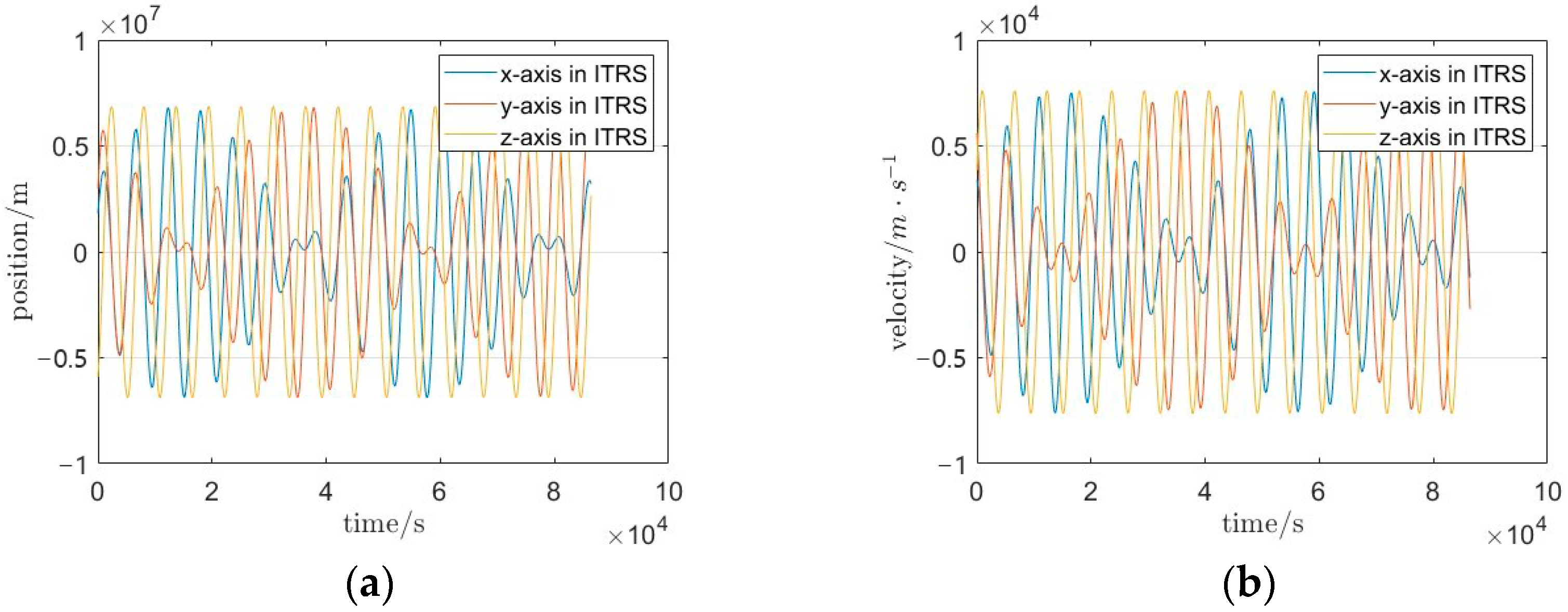
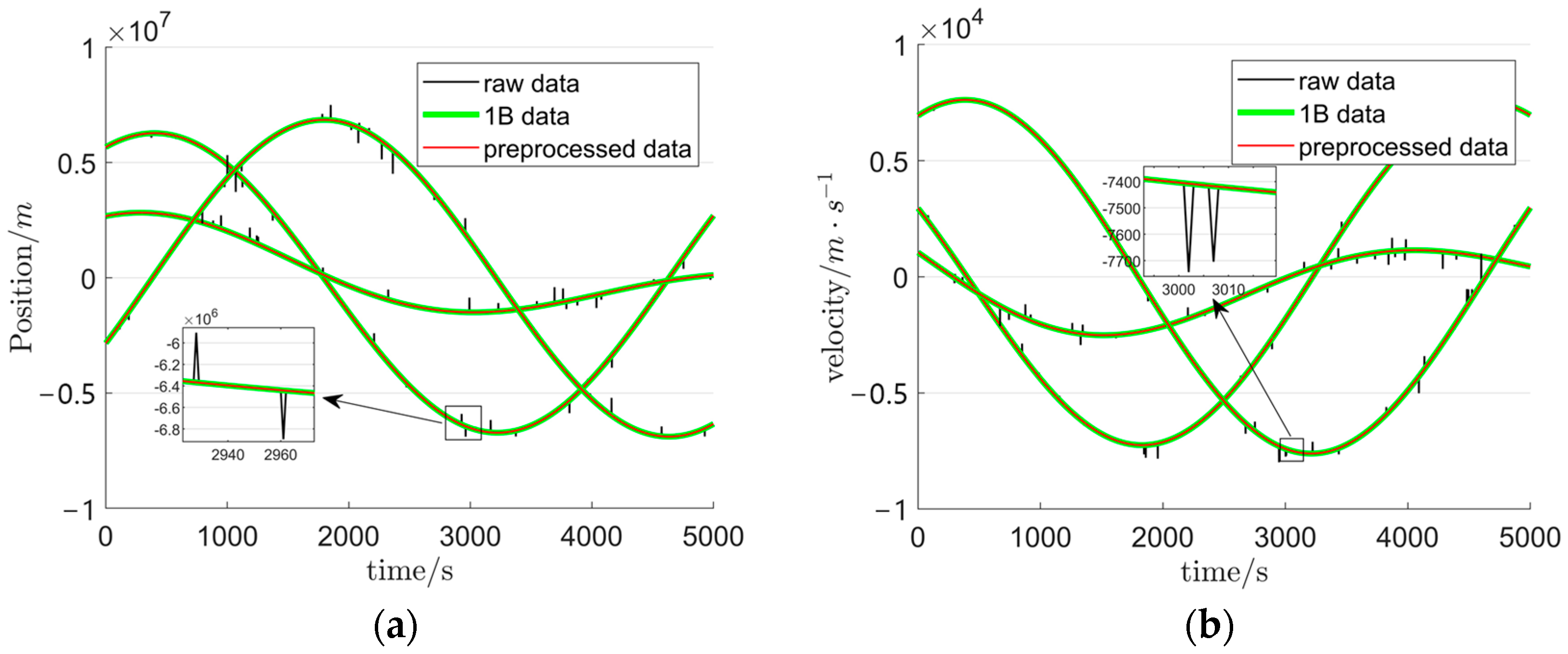
3.1. GRACE-FO Satellite Data Experiments
3.2. Inversion Results Based on the Energy Method
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Cazenave, A.; Dahle, C.; Llovel, W.; Panet, I.; Pfeffer, J.; Moreira, L. Applications and Challenges of GRACE and GRACE Follow-On Satellite Gravimetry. Surv. Geophys. 2022, 43, 305–345. [Google Scholar] [CrossRef] [PubMed]
- Ning, J.; Wang, Z. Progress and Present Status of Research on Earth’s Gravitational Field. J. Geomat. 2013, 38, 1–7. [Google Scholar]
- Zheng, W.; Xu, H.Z.; Zhong, M.; Yuan, M.J.; Peng, B.B.; Zhou, X.H. Progress and Present Status of Research on Earth’s Gravitational Field Models. J. Geod. Geodyn. 2010, 30, 83–91. [Google Scholar]
- Wang, Z. Theory and Methodology of Earth Gravity Field Recovery by Satellite-to-Satellite Tracking Data. Ph.D. Thesis, Wuhan University, Wuhan, China, 2005. [Google Scholar]
- Kornfeld, R.P.; Arnold, B.W.; Gross, M.A.; Dahya, N.T.; Klipstein, W.M.; Gath, P.F.; Bettadpur, S. GRACE-FO: The gravity recovery and climate experiment follow-on mission. J. Spacecr. Rocket 2019, 56, 931–951. [Google Scholar] [CrossRef]
- Goswami, S.; Klinger, B.; Weigelt, M.; Mayer-Gurr, T. Analysis of attitude errors in GRACE range-rate residuals-a comparison between SCA1B and the fused attitude product (SCA1B + ACC1B). IEEE Sens. Lett. 2018, 2, 5500604. [Google Scholar] [CrossRef]
- Wegener, H.; Müller, V.; Heinzel, G.; Misfeldt, M. Tilt-to-Length coupling in the GRACE Follow-On laser ranging interferometer. J. Spacecr. Rocket 2020, 57, 1362–1372. [Google Scholar] [CrossRef]
- Misfeldt, M.; Müller, V.; Heinzel, G.; Danzmann, K. Alternative level 1A to 1B processing of GRACE follow-on LRI data. In Proceedings of the 22nd EGU General Assembly, Vienna, Austria, 4–8 May 2020. [Google Scholar]
- Müller, V.; Hauk, M.; Misfeldt, M.; Müller, L.; Wegener, H.; Yan, Y.; Heinzel, G. Comparing GRACE-FO KBR and LRI ranging data with focus on carrier frequency variations. Remote Sens. 2022, 14, 4335. [Google Scholar] [CrossRef]
- Yan, Y.; Müller, V.; Heinzel, G.; Zhong, M. Revisiting the light time correction in gravimetric missions like GRACE and GRACE follow-on. J. Geod. 2021, 95, 48. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Mervart, L.; Meyer, U. The celestial mechanics approach: Application to data of the GRACE mission. J. Geod. 2010, 84, 661–681. [Google Scholar] [CrossRef]
- Zhang, Y. Data Processing and Application of GRACE Gravity Satellite. Master’s Thesis, Henan University, Kaifeng, China, 2017. [Google Scholar]
- Wu, X.; Zou, S.; Luo, X.; Deng, L.; Zhang, J. Research on the Preprocessing Method of TEQC Multi-Satellite Data. Jiangxi Sci. 2018, 36, 340–343. [Google Scholar]
- Ma, F.; Chen, L.; Li, B.; Zheng, S.; Wang, P.; Yu, Q. Design and Implementation of GECAM Preprocessing Pipeline. Astron. Technol. 2022, 19, 274–282. [Google Scholar]
- Zheng, W.; Hsu, H.-T.; Zhong, M.; Yun, M.-J. Precise recovery of the Earth’s gravitational field by GRACE Follow-On satellite gravity gradiometry method. Chin. J. Geophys. 2014, 57, 1415–1423. (In Chinese) [Google Scholar]
- Luo, Z.; Wu, Y.; Zhong, B.; Yang, G. Preprocessing of GOCE Satellite Gravity Gradient Measurement Data. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 1163–1167. [Google Scholar]
- Wu, Y. Research on Preprocessing of GOCE Satellite Gravity Gradient Measurement Data. Ph.D. Thesis, Wuhan University, Wuhan, China, 2010. [Google Scholar]
- Dobslaw, H.; Bergmann-Wolf, I.; Forootan, E.; Dahle, C.; Mayer-Gürr, T.; Kusche, J.; Flechtner, F. Modeling of present-day atmosphere and ocean non-tidal de-aliasing errors for future gravity mission simulations. J. Geod. 2016, 90, 423–436. [Google Scholar] [CrossRef]
- Shuang, Y.; Nico, S. Filling the Data Gaps Within GRACE Missions Using Singular Spectrum Analysis. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021227. [Google Scholar]
- Wöhnke, V.; Eicker, A.; Weigelt, M.; Reich, M.; Güntner, A.; Kvas, A.; Mayer-Gürr, T. Kalman filter framework for a regional mass change model from GRACE satellite gravity. GEM-Int. J. Geomath. 2024, 16, 2. [Google Scholar] [CrossRef]
- Wu, L. Study on Gravity Field Detection for Space-Borne Gravitational Wave Detection Program “Taiji”. Master’s Thesis, Chang’an University, Xi’an, China, 2023. [Google Scholar]
- Xu, T.; Yang, Y. CHAMP Gravity Field Recovery Using Energy Conservation Method. Acta Geod. Cartogr. Sin. 2005, 34, 1–6. [Google Scholar]
- Su, Y.; Fan, D.; You, W. Gravity Field Model Calculated by Using the GOCE Data. Acta Phys. Sin. 2014, 63, 448–456. [Google Scholar]
- Zhang, X.; Shen, Y. Method of Gravity Field Inversion with Combining GRACE Orbits and Range-Rate Observations. J. Geod. Geodyn. 2011, 31, 66–70. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean. Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Naeimi, M.; Flury, J. Global Gravity Field Modeling from Satellite-to-Satellite Tracking Data; Springer: Berlin, Germany, 2017. [Google Scholar]
- Liang, Y.; Zhu, G.-B.; Liu, H.-T.; Zhu, Y.-N.; Qu, Q.-L. Regularization of the earth gravity field determination using satellite gravity gradiometry data. Prog. Geophys. 2019, 34, 1323–1327. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Details |
|---|---|
| Inversion Order | 60 Order |
| Background Models for Inversion | EGM2008 Model (6–100 Order) |
| Third-body perturbations (Sun, Moon; JPL DE421 ephemeris) | |
| Solid Earth Tides (first 4 orders; IERS 2010 conventions) | |
| AOD1B product (RL06) | |
| Relativistic Effects (IERS 2010 conventions) | |
| Data Sampling Interval | 1 s |
| Data Duration | 30 days |
| Data Period | January 2020 |
| Gravity Field Model | Models Obtained Before Preprocessing | Model Obtained After Preprocessing | ||||||
|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | Std | Min | Max | Mean (10−2) | Std | |
| CSR | −1280.728 | 2140.733 | 184.786 | 11.784 | −389.5214 | 216.8015 | 5.22 | 6.1981 |
| JPL | −1280.884 | 2140.387 | 184.894 | 11.856 | −389.3761 | 216.5672 | 5.58 | 6.1957 |
| GFZ | −1280.435 | 2140.956 | 184.265 | 11.257 | −389.9654 | 216.3126 | 5.37 | 6.1948 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Li, L. GRACE-FO Satellite Data Preprocessing Based on Residual Iterative Correction and Its Application to Gravity Field Inversion. Sensors 2025, 25, 3555. https://doi.org/10.3390/s25113555
Zhao S, Li L. GRACE-FO Satellite Data Preprocessing Based on Residual Iterative Correction and Its Application to Gravity Field Inversion. Sensors. 2025; 25(11):3555. https://doi.org/10.3390/s25113555
Chicago/Turabian StyleZhao, Shuhong, and Lidan Li. 2025. "GRACE-FO Satellite Data Preprocessing Based on Residual Iterative Correction and Its Application to Gravity Field Inversion" Sensors 25, no. 11: 3555. https://doi.org/10.3390/s25113555
APA StyleZhao, S., & Li, L. (2025). GRACE-FO Satellite Data Preprocessing Based on Residual Iterative Correction and Its Application to Gravity Field Inversion. Sensors, 25(11), 3555. https://doi.org/10.3390/s25113555