

Research on a Particle Filtering Multi-Target Tracking Algorithm for Distributed Systems


Abstract
1. Introduction
- The integration of coupled measurements into distributed particle filtering to enhance multi-target tracking accuracy.
- The formulation of a cost function to optimize particle weight distribution through constrained likelihood maximization.
- A fused measurement to minimize the measurement noise.
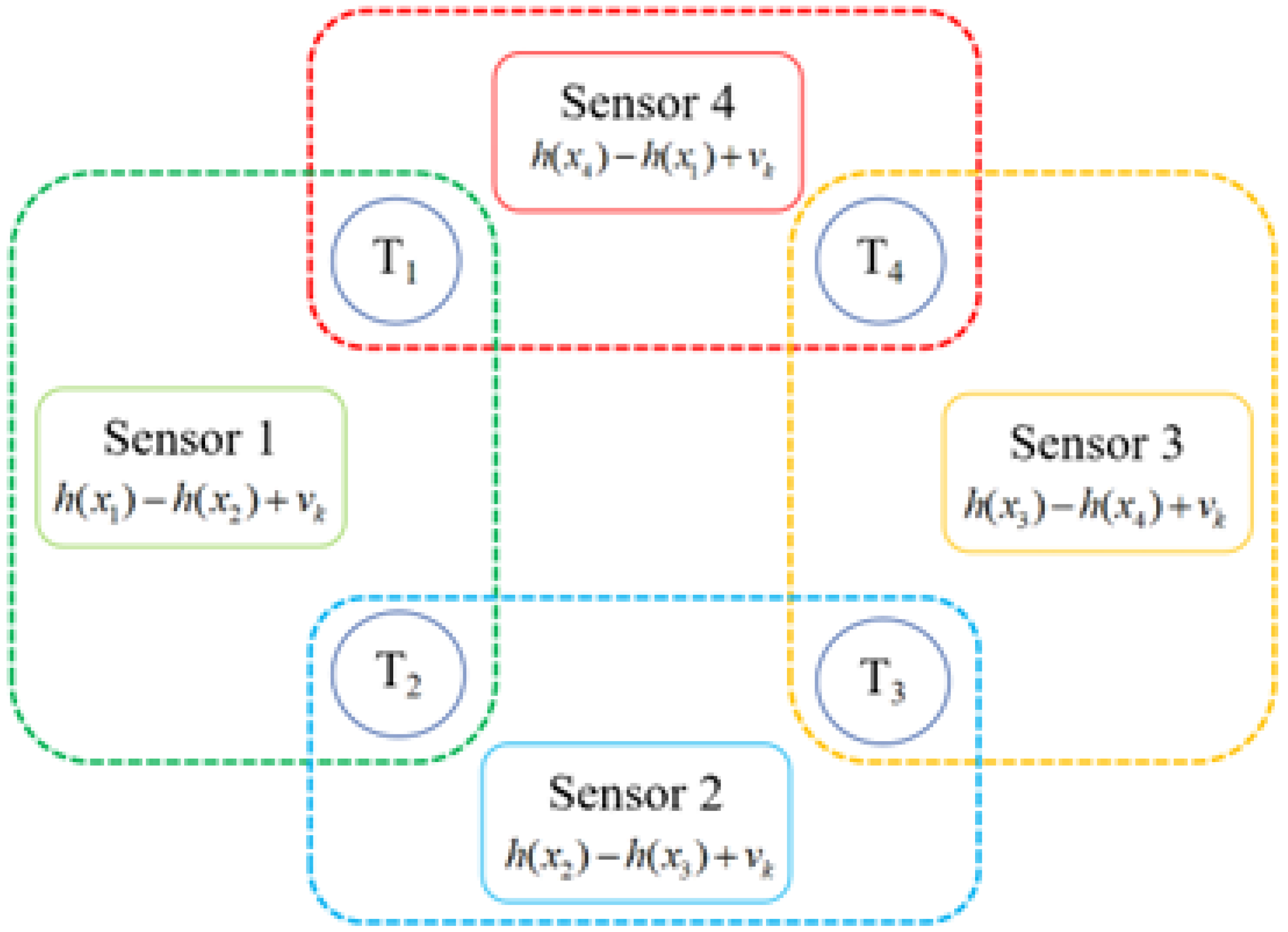
2. Problem Statement
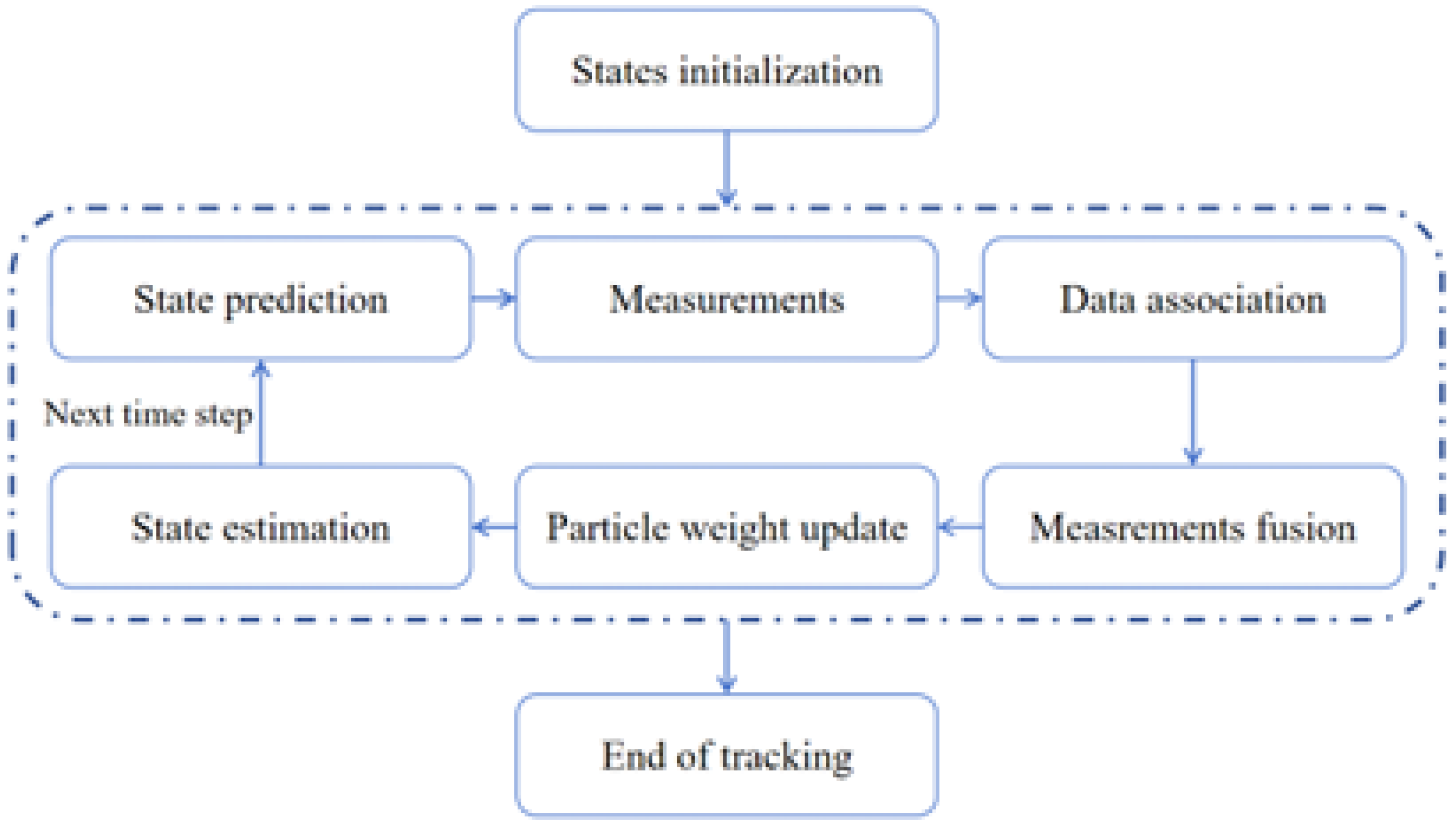
3. Distributed Particle Filtering
3.1. Measurements Fusion
3.2. Update of Particle Weights
4. Simulation and Analysis of Results
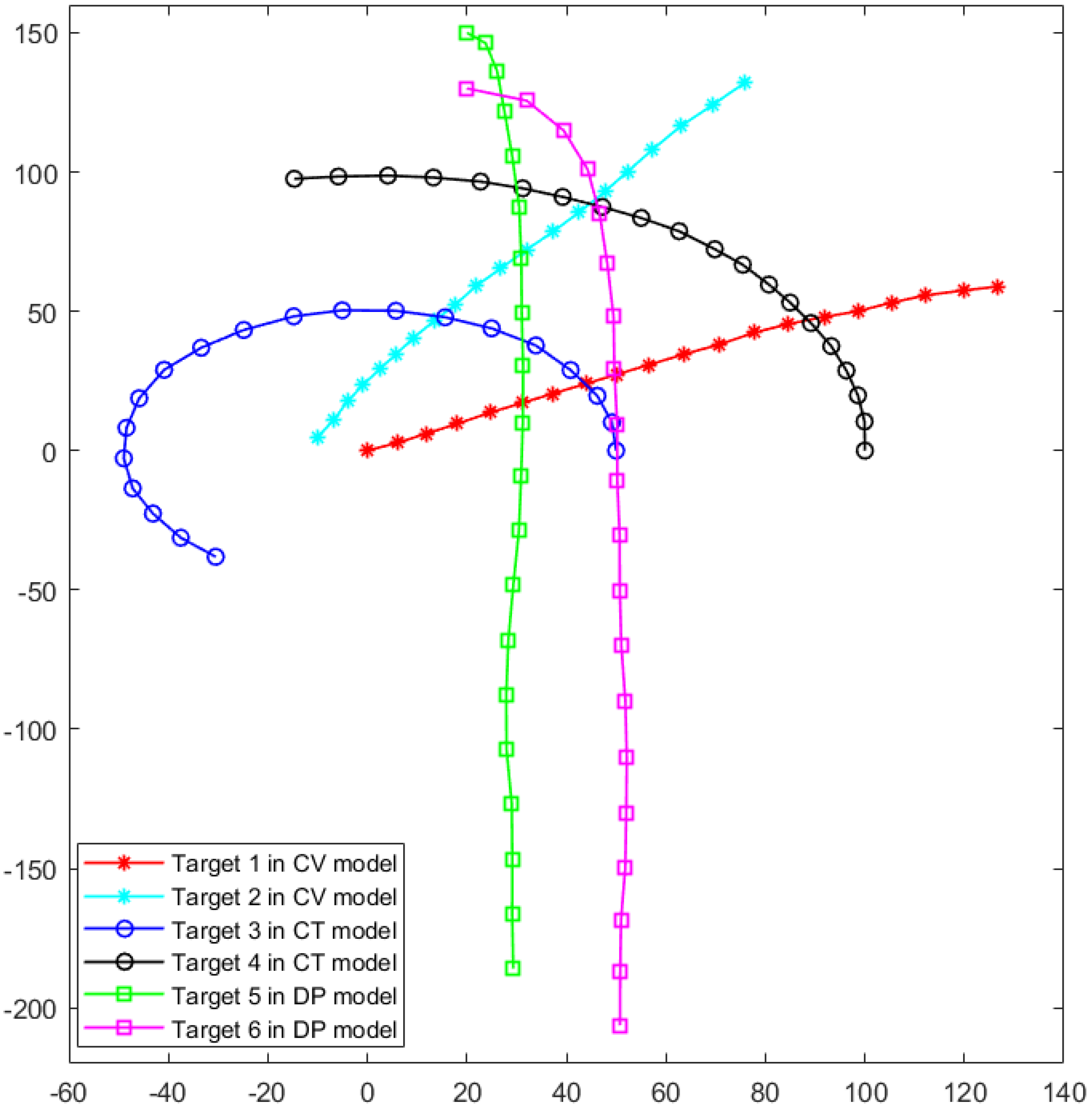
4.1. Simulation Setting
4.2. Determination of the Scaling Factor
4.3. Analysis of Results
- (1)
- The comparison of tracking average RMSE.
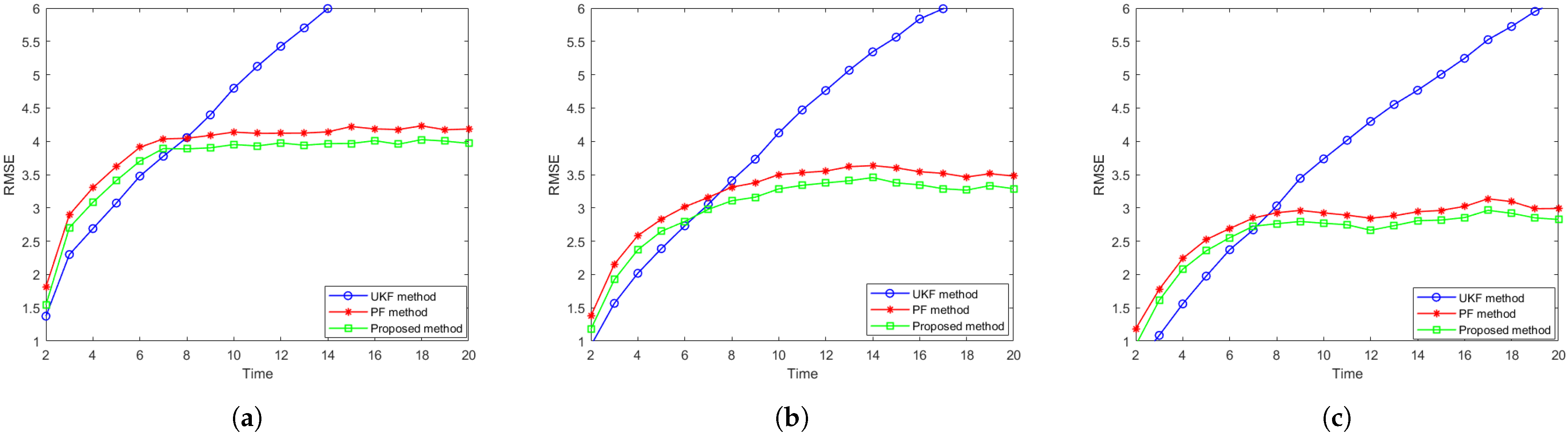
- (2)
- The comparison of tracking RMSE over time.
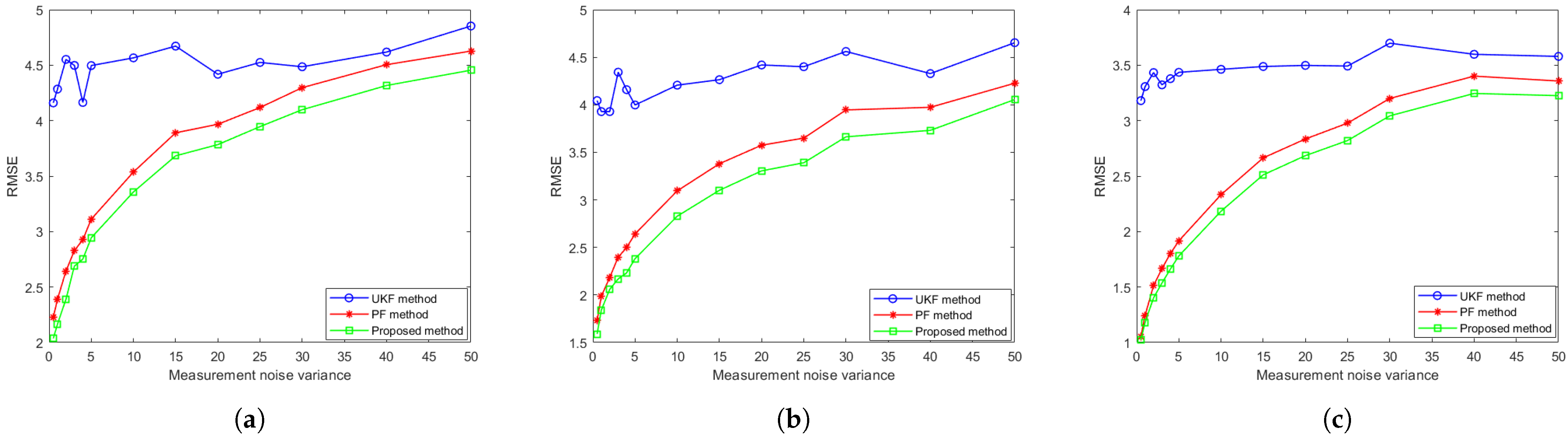
- (3)
- The evaluation of measurement noise.
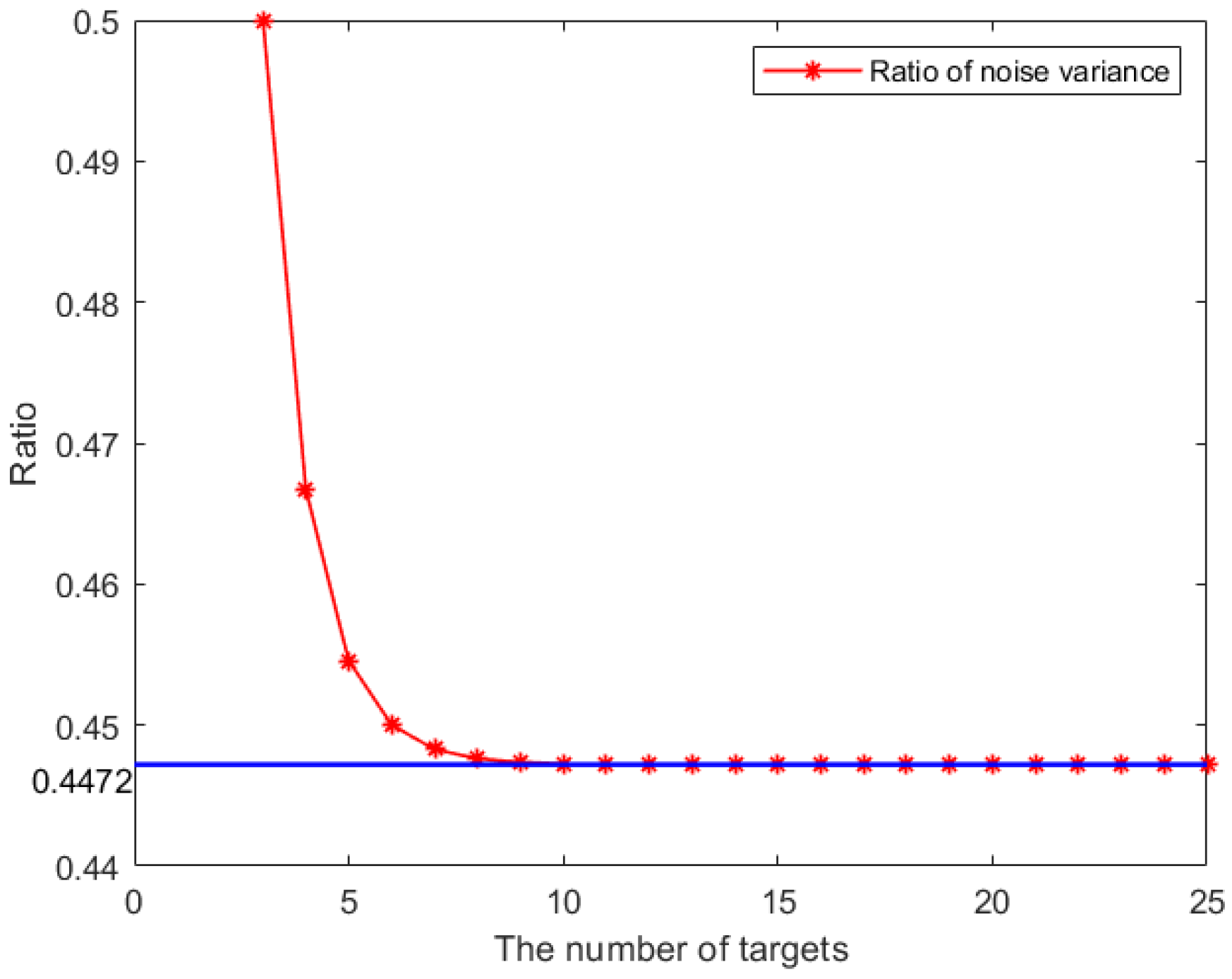
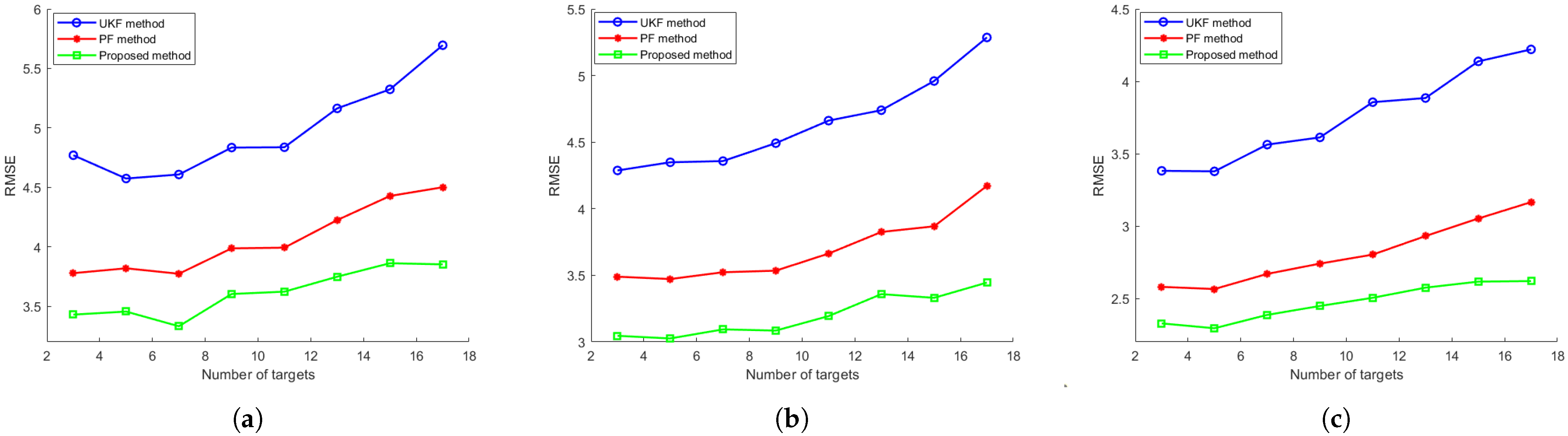
- (4)
- The evaluation of the number of targets.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, M.; Davies, M.E.; Proudler, I.K.; Hopgood, J.R. Adaptive Kernel Kalman Filter Based Belief Propagation Algorithm for Manoeuvring Multi-Target Tracking. IEEE Signal Process. Lett. 2022, 29, 1452–1456. [Google Scholar] [CrossRef]
- Sengupta, A.; Cheng, L.; Cao, S. Robust Multiobject Tracking Using Mmwave Radar-Camera Sensor Fusion. IEEE Sens. Lett. 2022, 6, 5501304. [Google Scholar] [CrossRef]
- Masazade, E.; Fardad, M.; Varshney, P.K. Sparsity-Promoting Extended Kalman Filtering for Target Tracking in Wireless Sensor Networks. IEEE Signal Process. Lett. 2012, 19, 845–848. [Google Scholar] [CrossRef]
- Aidala, V.J. Kalman Filter Behavior in Bearings-Only Tracking Applications. IEEE Trans. Aerosp. Electron. Syst. 1979, 15, 29–39. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Masoumnezhad, M.; Jamali, A.; Nariman-zadeh, N. Robust GMDH-type neural network with unscented Kalman filter for non-linear systems. Trans. Inst. Meas. Control 2016, 38, 992–1003. [Google Scholar] [CrossRef]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Wang, X.; Li, T.; Sun, S.; Corchado, J.M. A Survey of Recent Advances in Particle Filters and Remaining Challenges for Multitarget Tracking. Sensors 2017, 17, 2707. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Habtemariam, B.; Tharmarasa, R.; Thayaparan, T.; Mallick, M.; Kirubarajan, T. A Multiple-Detection Joint Probabilistic Data Association Filter. IEEE J. Sel. Top. Signal Process. 2013, 7, 461–471. [Google Scholar] [CrossRef]
- Si, W.; Wang, L.; Qu, Z. A measurement-driven adaptive probability hypothesis density filter for multitarget tracking. Chin. J. Aeronaut. 2015, 28, 1689–1698. [Google Scholar] [CrossRef]
- Chen, T.; Yang, P.; Peng, H.; Qian, Z. Multi-target tracking algorithm based on PHD filter against multi-range-false-target jamming. J. Syst. Eng. Electron. 2020, 31, 859–870. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Instrumental Variable Based Kalman Filter Algorithm for Three-Dimensional AOA Target Tracking. IEEE Signal Process. Lett. 2018, 25, 1605–1609. [Google Scholar] [CrossRef]
- Wang, C.H.; Xiong, X.; Liu, H. Target Tracking Algorithm of Automotive Radar Based on Iterated Square-root CKF. J. Phys. Conf. Ser. 2018, 25, 976–987. [Google Scholar] [CrossRef]
- Yan, J.; Pu, W.; Dai, J.; Liu, H.; Bao, Z. Resource allocation for search and track application in phased array radar based on Pareto bi-objective optimization. IEEE Trans. Veh. Technol. 2019, 68, 3487–3499. [Google Scholar] [CrossRef]
- Sun, H.; Li, M.; Zuo, L.; Zhang, P. Resource Allocation for Multitarget Tracking and Data Reduction in Radar Network With Sensor Location Uncertainty. IEEE Trans. Signal Process. 2021, 69, 4843–4858. [Google Scholar] [CrossRef]
- Su, Y.; Cheng, T.; He, Z.; Li, X. Joint Waveform Control and Resource Optimization for Maneuvering Targets Tracking in Netted Colocated MIMO Radar Systems. IEEE Syst. J. 2022, 16, 3960–3971. [Google Scholar] [CrossRef]
- Viegas, D.; Batista, P.; Oliveira, P.; Silvestre, C. Discrete-time distributed Kalman filter design for formations of autonomous vehicles. Control Eng. Pract. 2018, 75, 55–68. [Google Scholar] [CrossRef]
- Beaudeau, J.P.; Bugallo, M.F.; Djuric, P.M. RSSI-based multi-target tracking by cooperative agents using fusion of cross target information. IEEE Trans. Signal Process. 2015, 63, 5033–5044. [Google Scholar] [CrossRef]
- Li, W.; Xiong, K.; Jia, Y.; Du, J. Distributed Kalman Filter for Multitarget Tracking Systems With Coupled Measurements. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6599–6604. [Google Scholar] [CrossRef]
- Mohammadi, A.; Asif, A. Distributed particle filtering for large scale dynamical systems. In Proceedings of the IEEE 13th International Multitopic Conference, Islamabad, Pakistan, 1–5 September 2009. [Google Scholar]
- Seifzadeh, S.; Khaleghi, B.; Karray, F. Distributed Soft-Data-Constrained Multi-Model Particle Filter. IEEE Trans. Cybern. 2015, 45, 384–394. [Google Scholar] [CrossRef] [PubMed]
- Ghirmai, T. Distributed Particle Filter for Target Tracking: With Reduced Sensor Communications. Sensors 2016, 16, 1454. [Google Scholar] [CrossRef] [PubMed]
- Julier, S.J.; Uhlmann, J.K. A New Extension of Kalman Filter to Nonlinear Systems. Proc. SPIE 1997, 3068, 182–193. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | PF (m) | UKF (m) | Proposed Method (m) |
|---|---|---|---|
| CV model | 4.75 | 6.81 | 4.43 |
| CT model | 3.21 | 5.72 | 2.68 |
| DP model | 2.71 | 3.91 | 2.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, B.; Ge, Z.; Su, Z.; Hao, J. Research on a Particle Filtering Multi-Target Tracking Algorithm for Distributed Systems. Sensors 2025, 25, 3495. https://doi.org/10.3390/s25113495
Han B, Ge Z, Su Z, Hao J. Research on a Particle Filtering Multi-Target Tracking Algorithm for Distributed Systems. Sensors. 2025; 25(11):3495. https://doi.org/10.3390/s25113495
Chicago/Turabian StyleHan, Bing, Zilong Ge, Zhigang Su, and Jingtang Hao. 2025. "Research on a Particle Filtering Multi-Target Tracking Algorithm for Distributed Systems" Sensors 25, no. 11: 3495. https://doi.org/10.3390/s25113495
APA StyleHan, B., Ge, Z., Su, Z., & Hao, J. (2025). Research on a Particle Filtering Multi-Target Tracking Algorithm for Distributed Systems. Sensors, 25(11), 3495. https://doi.org/10.3390/s25113495