
Compressed Sensing of Vibration Signal for Fault Diagnosis of Bearings, Gears, and Propellers Under Speed Variation Conditions


Abstract
1. Introduction
2. Materials and Methods
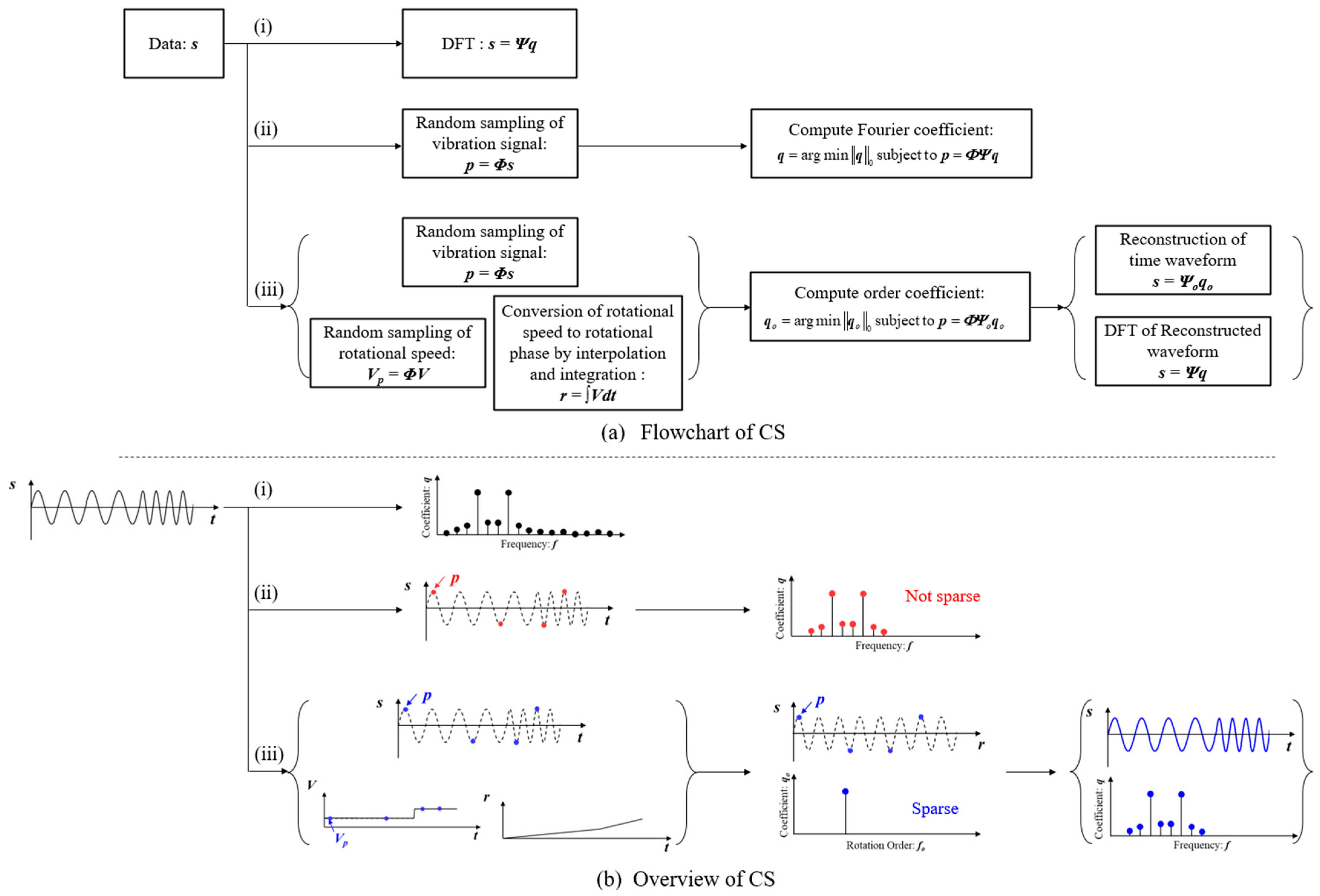
2.1. Vibration Measurement Method Using CS with Order-Ratio Basis
- The criterion for stopping when none of the columns in the observation matrix are strongly correlated with the residual is given by the equation below [61].||AH re||∞ < λomp ||re||2
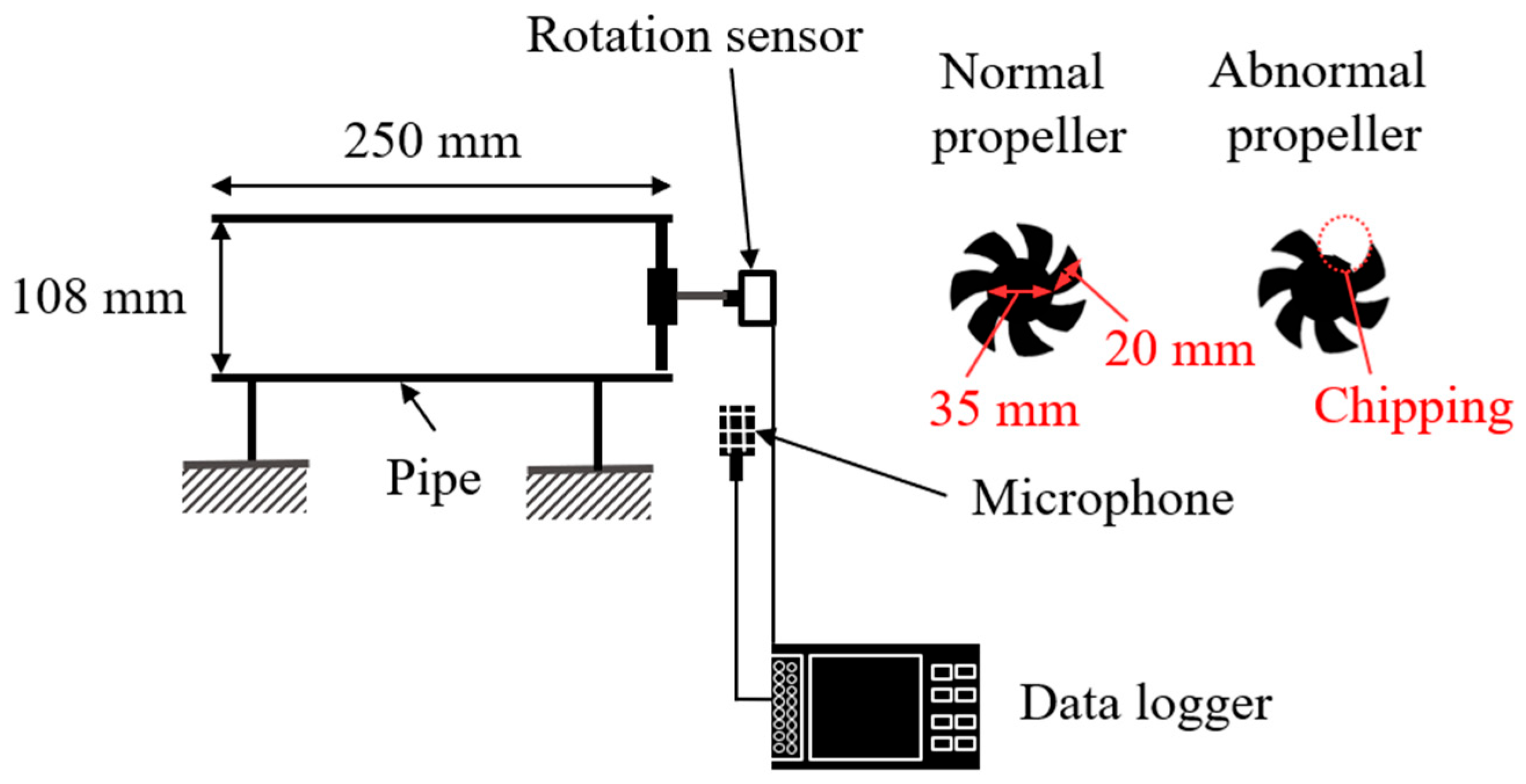
2.2. Verification Equipment for Propeller Failure Diagnosis
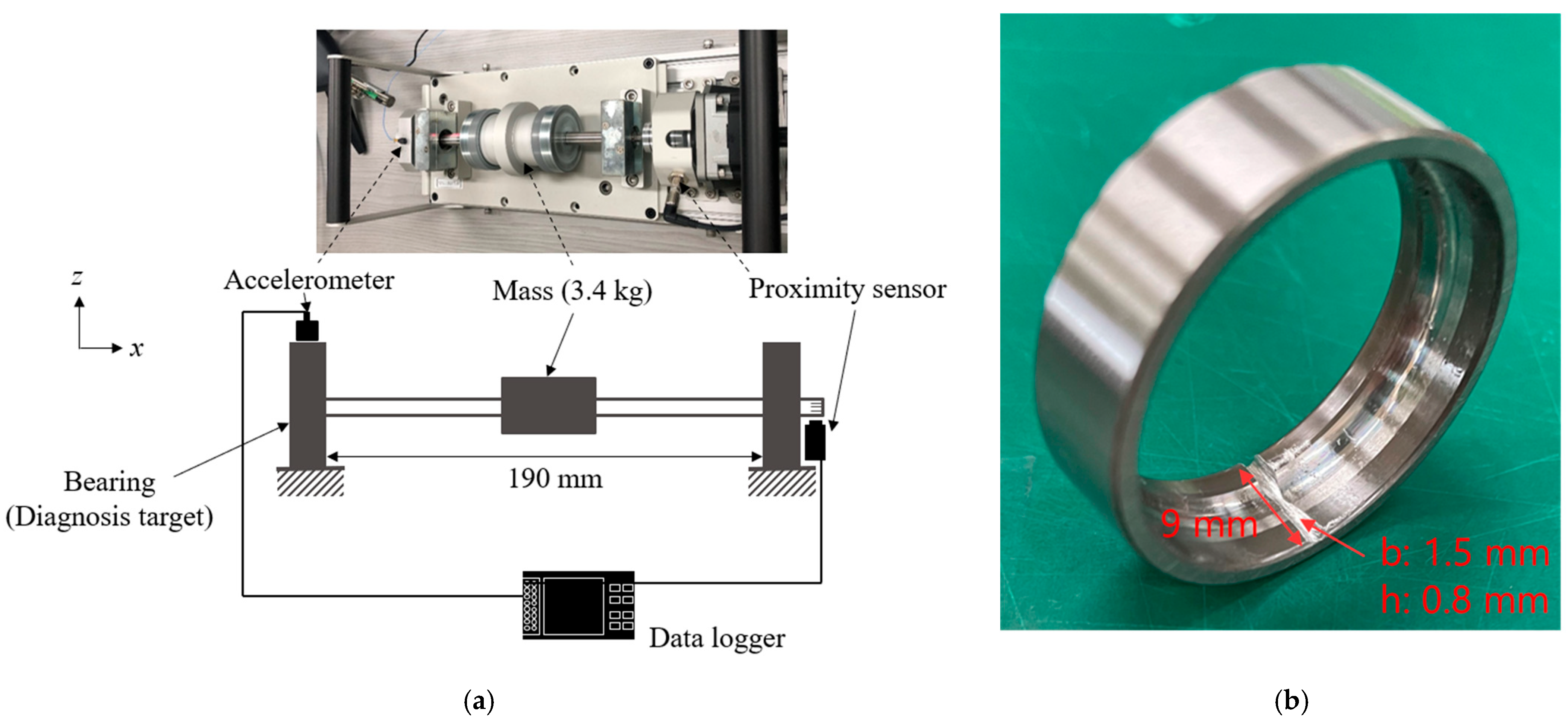
2.3. Verification Equipment for Bearing Failure Diagnosis
3. Numerical Experiment
3.1. Verification of the Principle of CS with Order Basis
3.2. Evaluation of CS with Order Basis for Gear Failure
4. Experimental Results
4.1. Evaluation of CS with Order Basis for Propeller Fault Diagnosis
4.2. Evaluation of CS with Order Basis for Bearing Fault Diagnosis
5. Conclusions
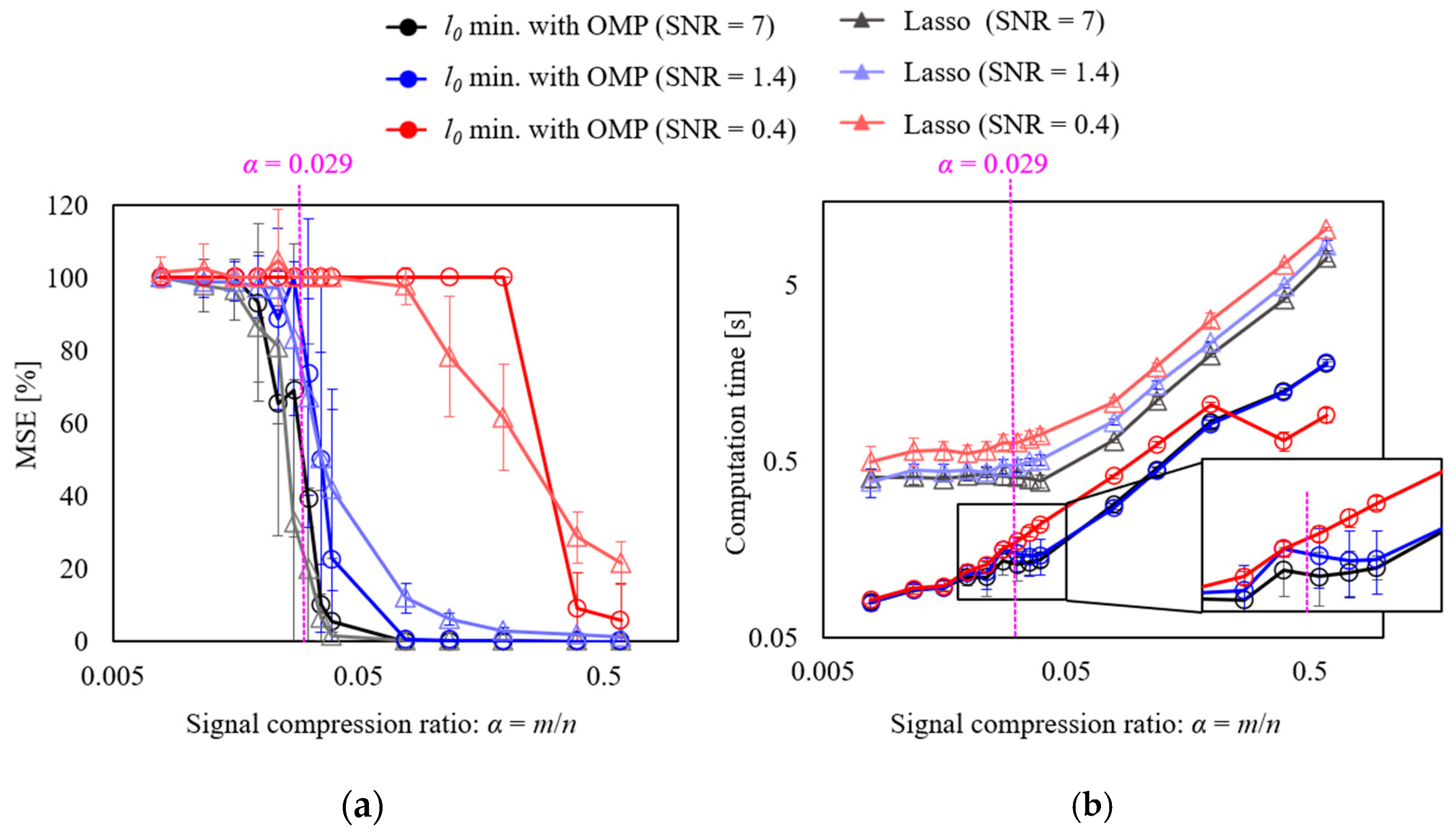
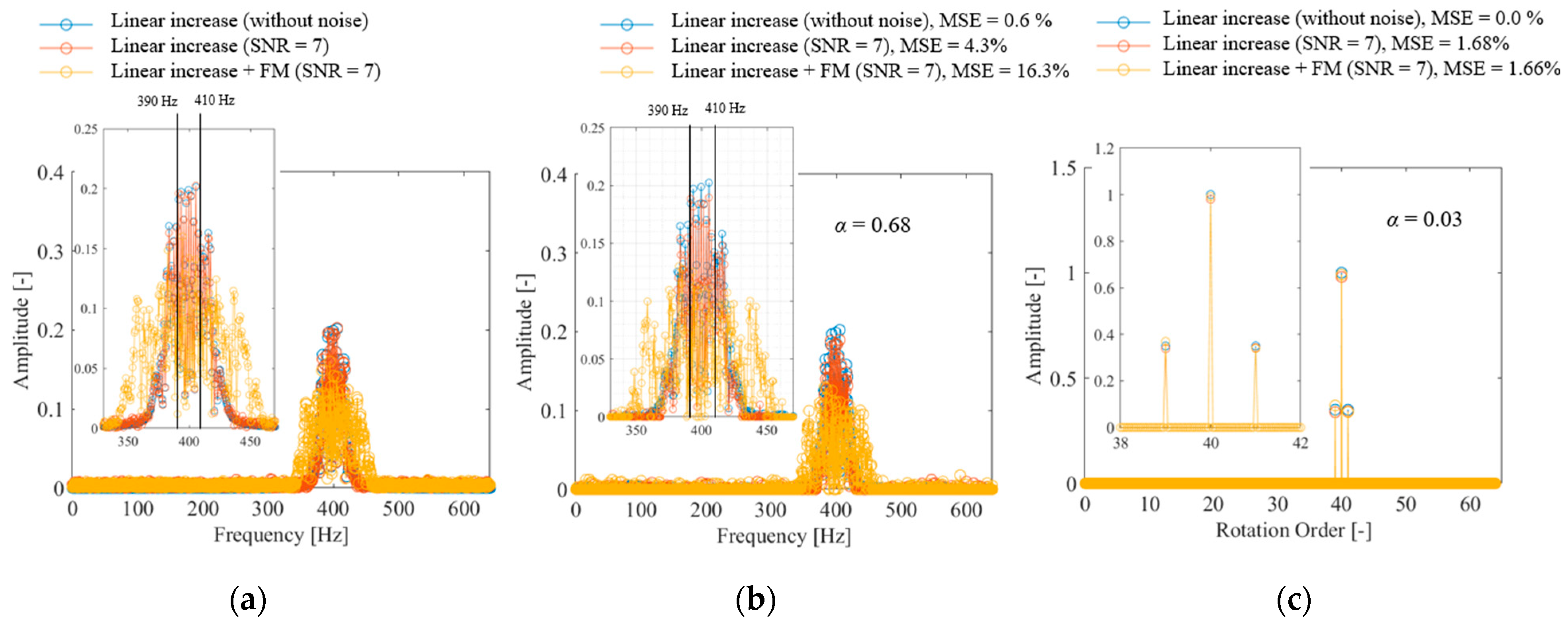
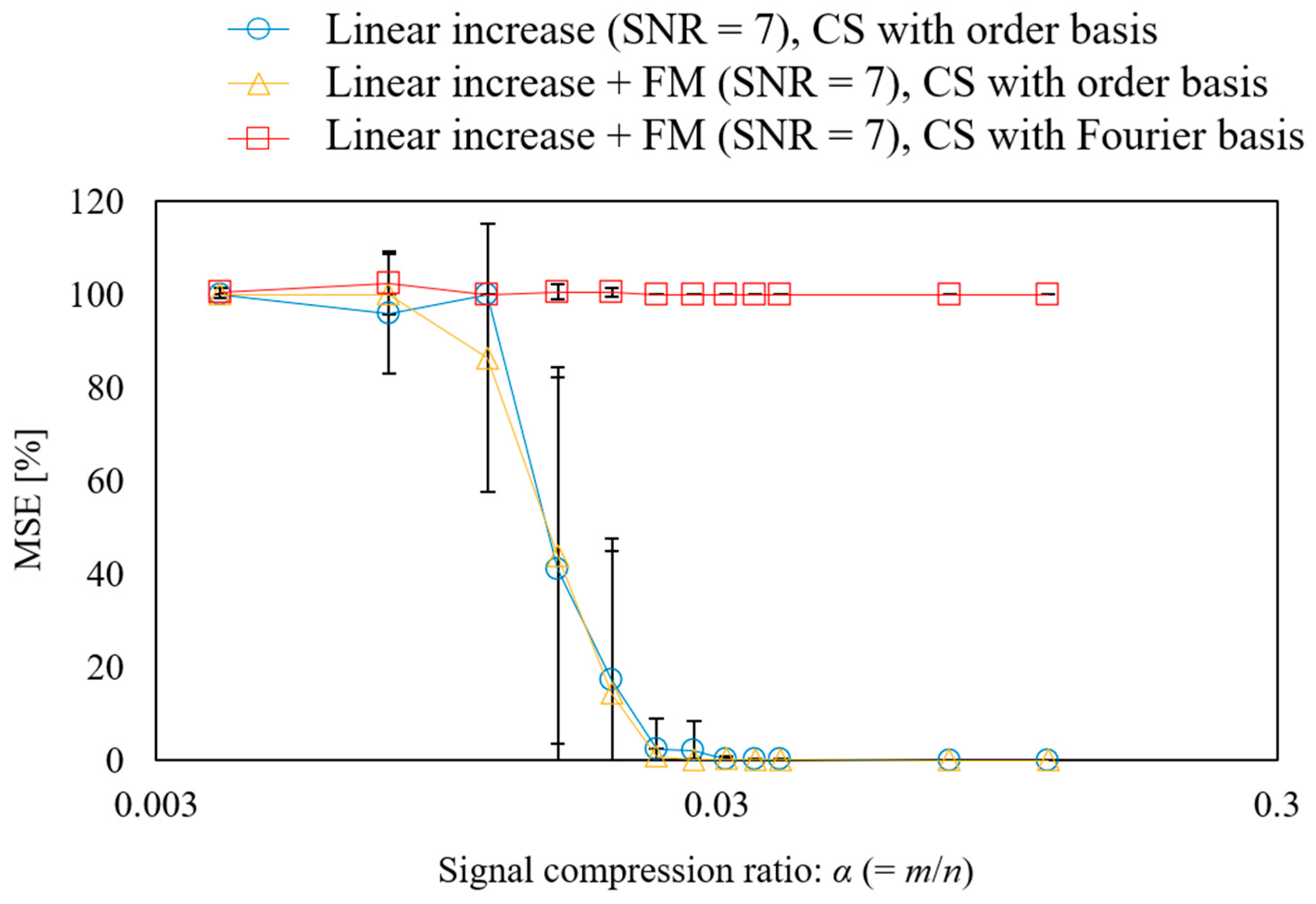
- Numerical experimental results showed that for the CS of rotational vibrations with a velocity variation of approximately 10% of the mean value, the proposed method can reconstruct the spectrum from approximately 1/20 of the number of measurement points in the Fourier basis [11,17,18,19,20,46,50]. In terms of noise tolerance, when the SNR is 7 or higher, the method can reconstruct a spectrum if the number of measurement points is within the theoretically guaranteed range; however, when the SNR is 0.4, the performance deteriorates drastically.
- An evaluation of the proposed method on a simulated vibration signal of a broken gear demonstrated that it is possible to reconstruct the vibration with an MSE of less than 2% from several measurement points (α = 0.029), which is approximately 1/35 of the full sampling. In addition, the method can clearly detect sidebands originating from gear eccentricity, which could not be observed in the Fourier basis owing to the effect of rotational speed fluctuation and the identification in the order domain.
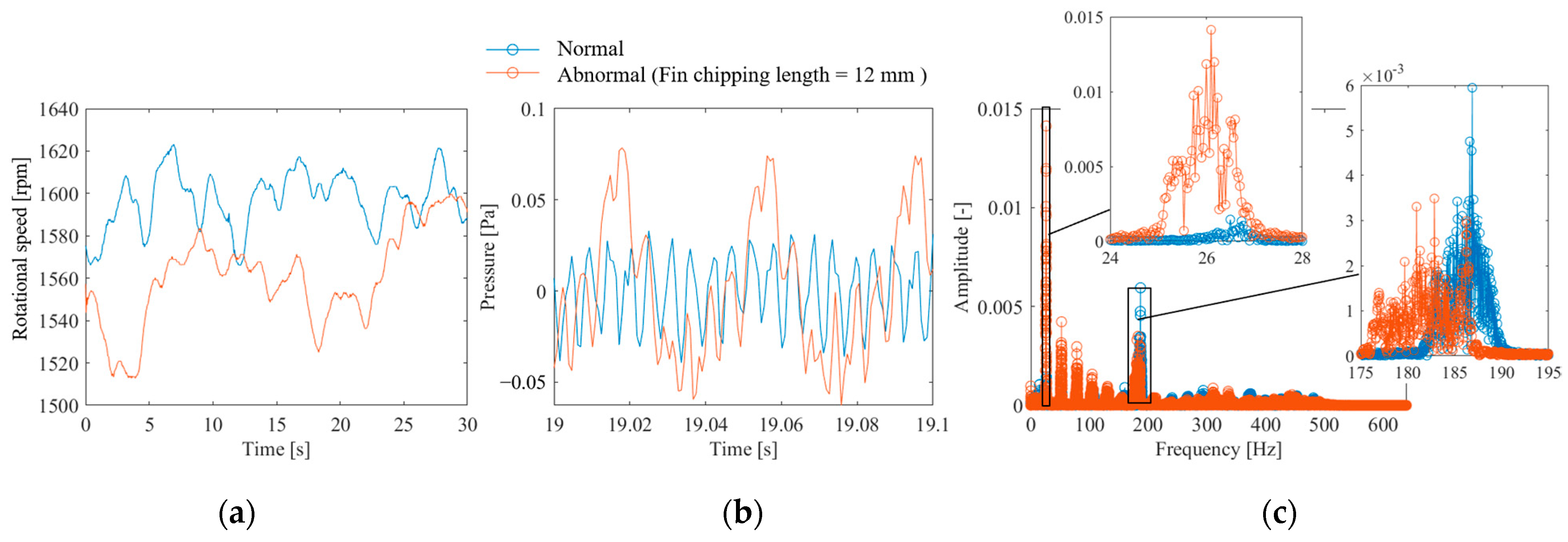
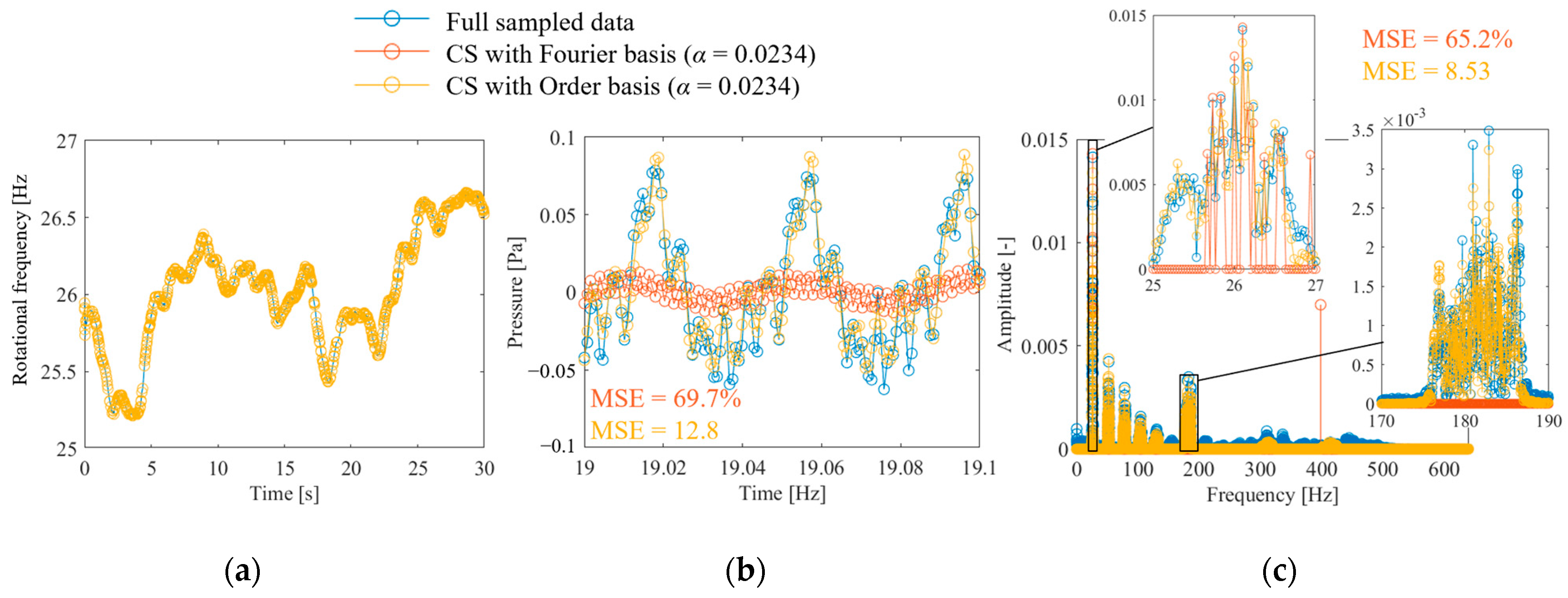
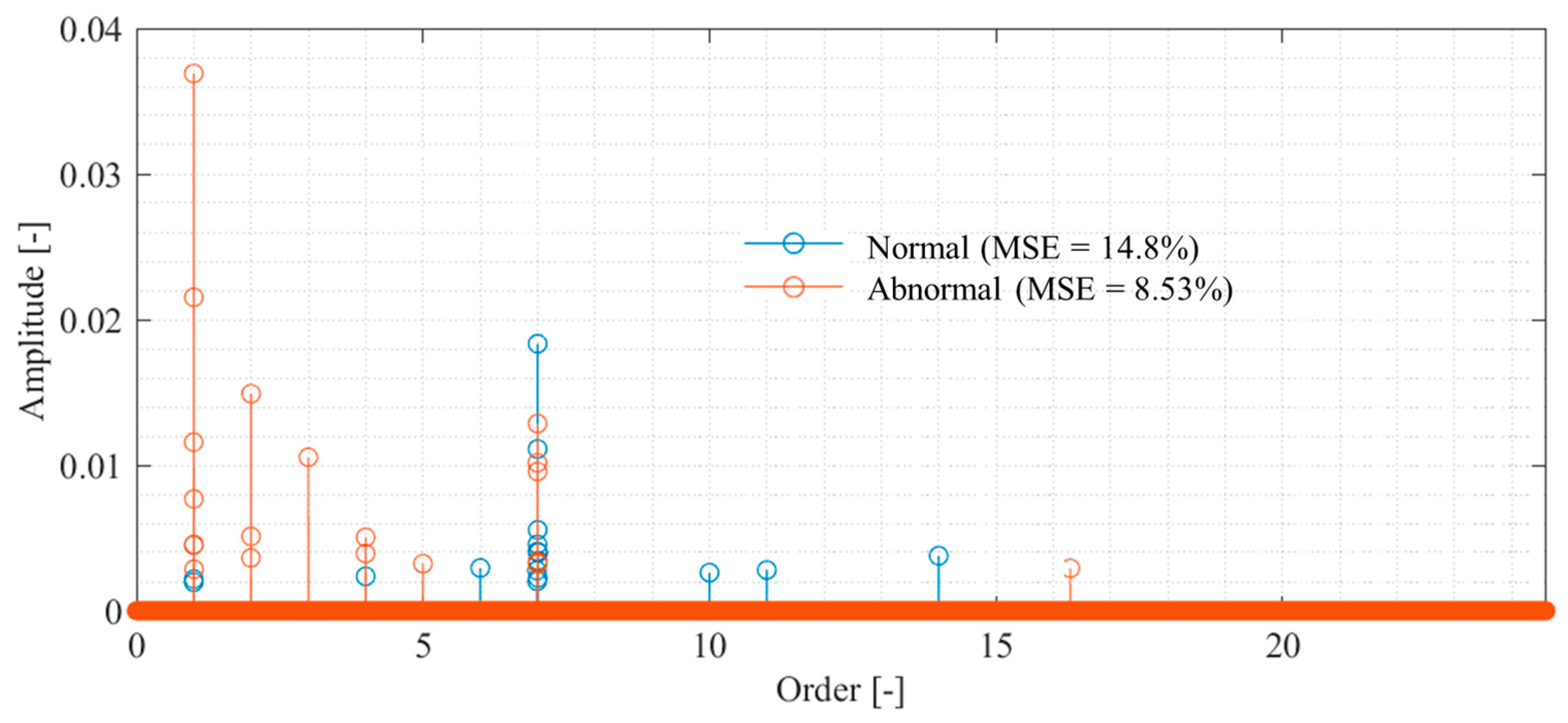
- The results of the propeller drive experiment showed that the proposed method enables CS with an MSE of 8.5% even with the number of points amounting to approximately 1/43 of full sampling (α = 0.023). In addition, the findings suggest that fault diagnosis can be performed by monitoring the increase in the rotation frequency component and decrease in the propeller passing frequency component in the order spectrum measured using the proposed method.
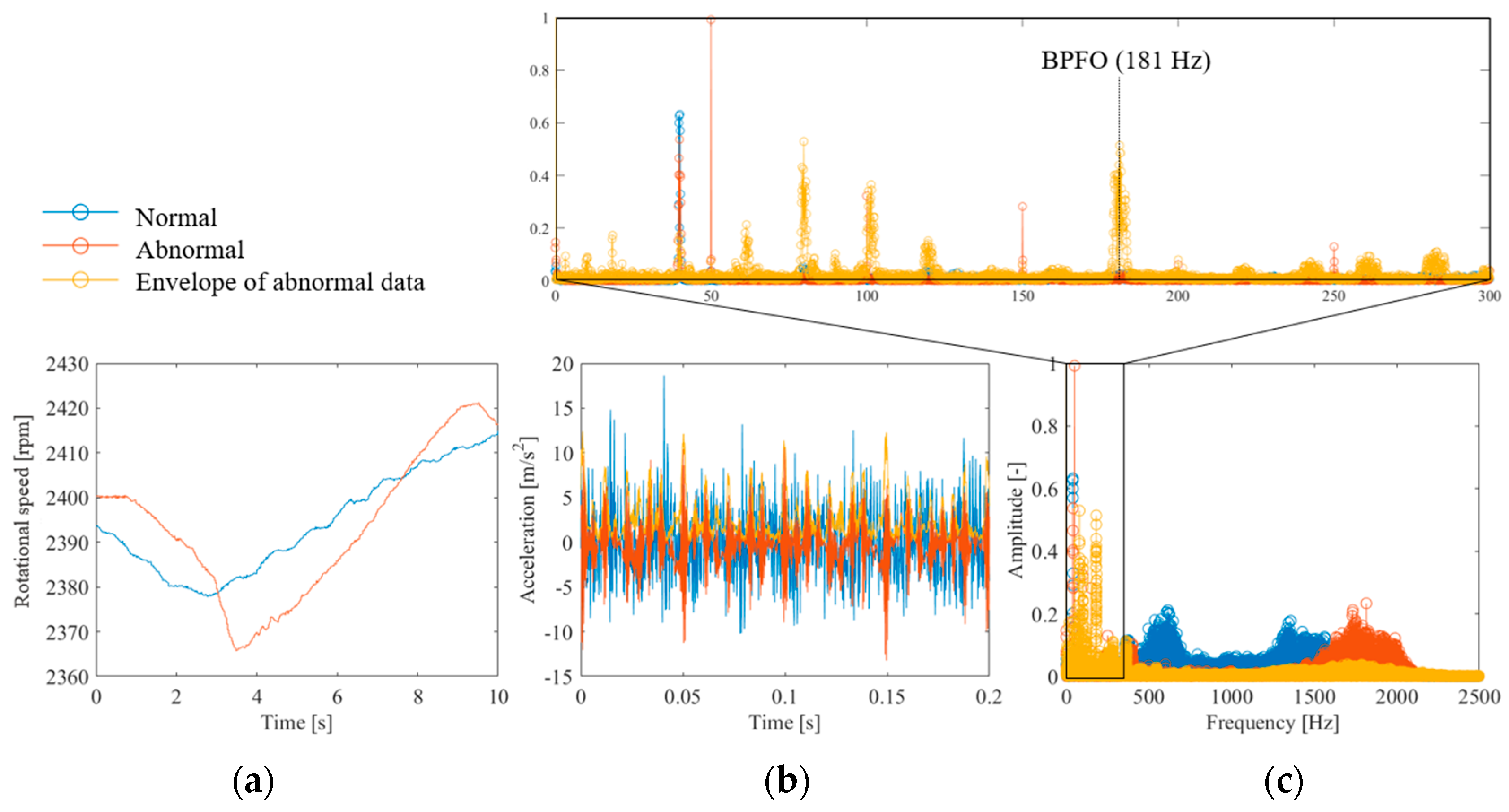
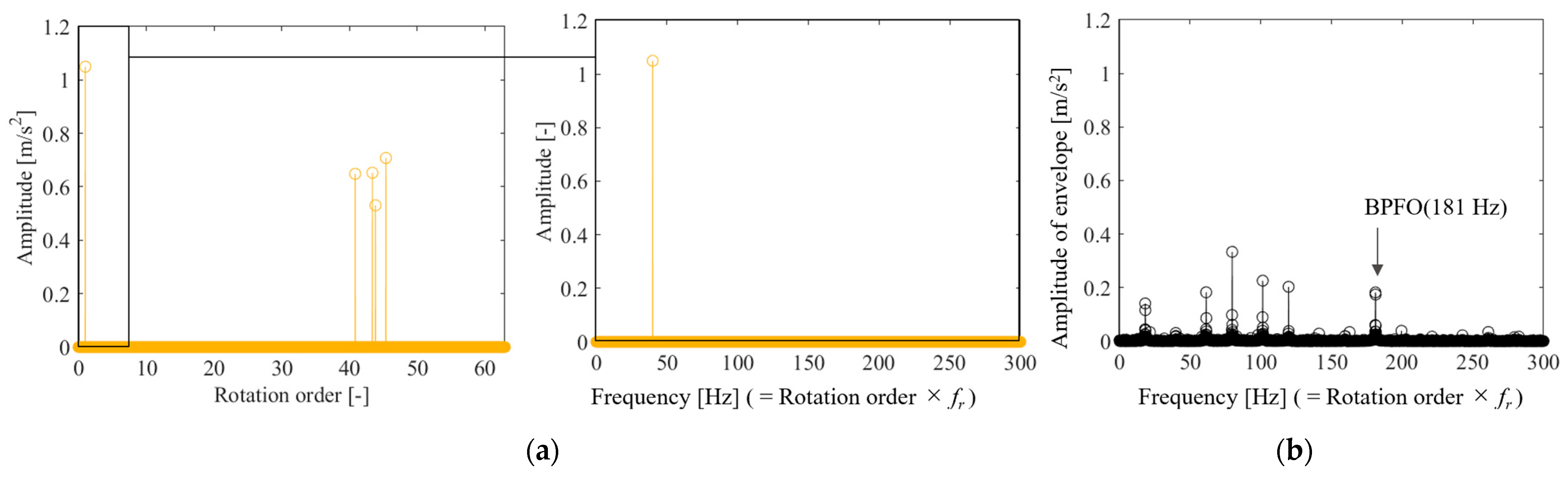
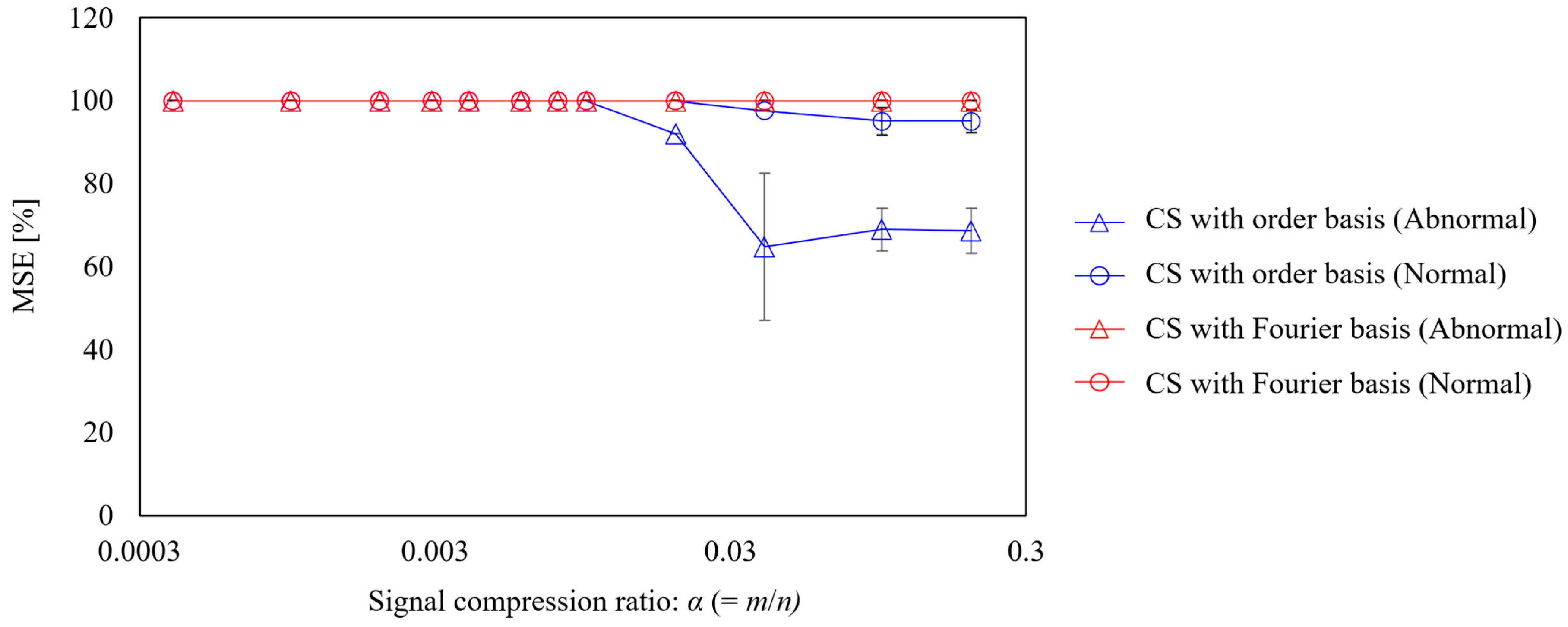
- The experiments conducted on a bearing with a defective outer ring showed that the proposed method can perform the CS of a portion of the anomalous vibration caused by an outer ring defect with the number of points (α = 0.039) amounting to approximately 1/26 of the full sampling. By applying envelope processing and Fourier transform to the signal reconstructed via CS, components consistent with the BPFO can be extracted. Therefore, fault detection is concluded to be possible; however, the reconstruction error is large and the MSE is greater than 60%. This is possibly because the vibration caused by the outer ring defect and the natural vibration of the bearing are shock waveforms with many components in the 1500–2000 Hz range and damped vibration with a wide peak bandwidth, which are not sparse in the order basis.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Li, Z.; Pan, J.; Chen, G.; Zi, Y.; Yuan, J.; Chen, B.; He, Z. Wavelet transform based on inner product in fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2016, 70, 1–35. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.V.; Li, C.; Pacheco, F.; Cabrera, D.; Valente de Oliveira, J.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Feng, Z. Dynamic modeling of gearbox faults: A review. Mech. Syst. Signal Process. 2018, 98, 852–876. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.C.; Ni, Q.; Beer, M. A review of vibration-based gear wear monitoring and prediction techniques. Mech. Syst. Signal Process. 2023, 182, 109605. [Google Scholar] [CrossRef]
- Gao, Y.; Cain, T.; Cooper, P. Automatic detection of underwater propeller signals using cyclostationarity analysis. Mech. Syst. Signal Process. 2021, 146, 107032. [Google Scholar] [CrossRef]
- Tong, W.; Wu, K.; Wang, H.; Cao, L.; Huang, B.; Wu, D.; Antoni, J. Adaptive weighted envelope spectrum: A robust spectral quantity for passive acoustic detection of underwater propeller based on spectral coherence. Mech. Syst. Signal Process. 2024, 212, 111265. [Google Scholar] [CrossRef]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-based solution for fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef]
- Candés, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inform. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Bao, Y.; Beck, J.L.; Li, H. Compressive sampling for accelerometer signals in structural health monitoring. Struct. Health Monit. 2011, 10, 235–246. [Google Scholar]
- Gkoktsi, K.; Giaralis, A. A multi-sensor sub-Nyquist power spectrum blind sampling approach for low-power wireless sensors in operational modal analysis applications. Mech. Syst. Signal Process. 2019, 116, 879–899. [Google Scholar] [CrossRef]
- Amini, F.; Hedayati, Y.; Zanddizari, H. Exploiting the inter-correlation of structural vibration signals for data loss recovery: A distributed compressive sensing based approach. Mech. Syst. Signal Process. 2021, 152, 107473. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Harnessing data structure for recovery of randomly missing structural vibration responses time history: Sparse representation versus low-rank. Mech. Syst. Signal Process. 2016, 74, 165–182. [Google Scholar] [CrossRef]
- Wan, H.P.; Dong, G.S.; Luo, Y.; Ni, Y.Q. An improved complex multi-task Bayesian compressive sensing approach for compression and reconstruction of SHM data. Mech. Syst. Signal Process. 2022, 167, 108531. [Google Scholar] [CrossRef]
- An, Y.; Xue, Z.; Ou, J. Deep learning-based sparsity-free compressive sensing method for high accuracy structural vibration response reconstruction. Mech. Syst. Signal Process. 2024, 211, 111168. [Google Scholar] [CrossRef]
- O’Connor, S.M.; Lynch, J.P.; Gilbert, A.C. Compressed sensing embedded in an operational wireless sensor network to achieve energy efficiency in long-term monitoring applications. Smart Mater. Struct. 2014, 23, 085014. [Google Scholar] [CrossRef]
- Zou, Z.; Bao, Y.; Li, H.; Spencer, B.F.; Ou, J. Embedding compressive sensing-based data loss recovery algorithm into wireless smart sensors for structural health monitoring. IEEE Sens. J. 2014, 15, 797–808. [Google Scholar]
- Gkoktsi, K.; Giaralis, A. Assessment of sub-Nyquist deterministic and random data sampling techniques for operational modal analysis. Struct. Health Monit. 2017, 16, 630–646. [Google Scholar] [CrossRef]
- Bao, Y.; Shi, Z.; Wang, X.; Li, H. Compressive sensing of wireless sensors based on group sparse optimization for structural health monitoring. Struct. Health Monit. 2018, 17, 823–836. [Google Scholar] [CrossRef]
- Bao, Y.; Li, H.; Sun, X.; Yu, Y.; Ou, J. Compressive sampling-based data loss recovery for wireless sensor networks used in civil structural health monitoring. Struct. Health Monit. 2013, 12, 78–95. [Google Scholar] [CrossRef]
- Bao, Y.; Yu, Y.; Li, H.; Mao, X.; Jiao, W.; Zou, Z.; Ou, J. Compressive sensing-based lost data recovery of fast-moving wireless sensing for structural health monitoring. Struct. Control Health Monit. 2015, 22, 433–448. [Google Scholar] [CrossRef]
- Almasri, N.; Sadhu, A.; Ray Chaudhuri, S. Toward compressed sensing of structural monitoring data using discrete cosine transform. J. Comput. Civ. Eng. 2020, 34, 04019041. [Google Scholar] [CrossRef]
- Lu, Y.; Wang, Y. A physics-constrained dictionary learning approach for compression of vibration signals. Mech. Syst. Signal Process. 2021, 153, 107434. [Google Scholar] [CrossRef]
- Pan, Z.; Meng, Z.; Zhang, Y.; Zhang, G.; Pang, X. High-precision bearing signal recovery based on signal fusion and variable stepsize forward-backward pursuit. Mech. Syst. Signal Process. 2021, 157, 107647. [Google Scholar] [CrossRef]
- Rani, M.; Dhok, S.; Deshmukh, R. A machine condition monitoring framework using compressed signal processing. Sensors 2020, 20, 319. [Google Scholar] [CrossRef]
- Sun, J.; Yu, Y.; Wen, J. Compressed-sensing reconstruction based on block sparse Bayesian learning in bearing-condition monitoring. Sensors 2017, 17, 1454. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, H.O.; Nandi, A.K. Three-stage hybrid fault diagnosis for rolling bearings with compressively sampled data and subspace learning techniques. IEEE Trans. Ind. Electron. 2018, 66, 5516–5524. [Google Scholar] [CrossRef]
- Sun, J.; Yan, C.; Wen, J. Intelligent bearing fault diagnosis method combining compressed data acquisition and deep learning. IEEE Trans. Instrum. Meas. 2017, 67, 185–195. [Google Scholar] [CrossRef]
- Hu, Z.X.; Wang, Y.; Ge, M.F.; Liu, J. Data-driven fault diagnosis method based on compressed sensing and improved multiscale network. IEEE Trans. Ind. Electron. 2019, 67, 3216–3225. [Google Scholar] [CrossRef]
- Liang, C.; Chen, C.; Liu, Y.; Jia, X. A novel intelligent fault diagnosis method for rolling bearings based on compressed sensing and stacked multi-granularity convolution denoising auto-encoder. IEEE Access 2021, 9, 154777–154787. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, W.; Wang, X.; Gu, H. A novel wind turbine fault diagnosis method based on compressed sensing and DTL-CNN. Renew. Energy 2022, 194, 249–258. [Google Scholar] [CrossRef]
- Wang, H.; Yang, S.; Liu, Y.; Li, Q. Compressive sensing reconstruction for rolling bearing vibration signal based on improved iterative soft thresholding algorithm. Measurement 2023, 210, 112528. [Google Scholar] [CrossRef]
- Li, Q. Wavelet-based spatiotemporal sparse quaternion dictionary learning for reconstruction of multi-channel vibration data. Appl. Soft Comput. 2024, 167, 112354. [Google Scholar] [CrossRef]
- Jian, T.; Cao, J.; Liu, W.; Xu, G.; Zhong, J. A novel wind turbine fault diagnosis method based on compressive sensing and lightweight squeezenet model. Expert Syst. Appl. 2025, 260, 125440. [Google Scholar] [CrossRef]
- Tang, G.; Hou, W.; Wang, H.; Luo, G.; Ma, J. Compressive Sensing of Roller Bearing Faults via Harmonic Detection from Under-Sampled Vibration Signals. Sensors 2015, 15, 25648–25662. [Google Scholar] [CrossRef]
- Tang, G.; Yang, Q.; Wang, H.Q.; Luo, G.G.; Ma, J.W. Sparse classification of rotating machinery faults based on compressive sensing strategy. Mechatronics 2015, 31, 60–67. [Google Scholar] [CrossRef]
- Ahmed, H.O.A.; Wong, M.D.; Nandi, A.K. Intelligent condition monitoring method for bearing faults from highly compressed measurements using sparse over-complete features. Mech. Syst. Signal Process. 2018, 99, 459–477. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhang, H.; Duan, W.; Liang, T.; Wu, S. Rolling bearing fault feature learning using improved convolutional deep belief network with compressed sensing. Mech. Syst. Signal Process. 2018, 100, 743–765. [Google Scholar] [CrossRef]
- Yuan, H.; Lu, C. Rolling bearing fault diagnosis under fluctuant conditions based on compressed sensing. Struct. Control. Health Monit. 2017, 24, e1918. [Google Scholar] [CrossRef]
- Ahmed, H.O.; Nandi, A.K. Intrinsic dimension estimation-based feature selection and multinomial logistic regression for classification of bearing faults using compressively sampled vibration signals. Entropy 2022, 24, 511. [Google Scholar] [CrossRef]
- Ma, Y.; Jia, X.; Bai, H.; Liu, G.; Wang, G.; Guo, C.; Wang, S. A new fault diagnosis method based on convolutional neural network and compressive sensing. J. Mech. Sci. Technol. 2019, 33, 5177–5188. [Google Scholar] [CrossRef]
- You, X.; Li, J.; Deng, Z.; Zhang, K.; Yuan, H. Fault Diagnosis of Rotating Machinery Based on Two-Stage Compressed Sensing. Machines 2023, 11, 242. [Google Scholar] [CrossRef]
- Chen, X.; Du, Z.; Li, J.; Li, X.; Zhang, H. Compressed sensing based on dictionary learning for extracting impulse components. Signal Process. 2014, 96, 94–109. [Google Scholar] [CrossRef]
- Hong, S.; Lu, Y.; Dunning, R.; Ahn, S.H.; Wang, Y. Adaptive fusion based on physics-constrained dictionary learning for fault diagnosis of rotating machinery. Manuf. Lett. 2023, 35, 999–1008. [Google Scholar] [CrossRef]
- Kato, Y. Fault diagnosis of a propeller using sub-Nyquist sampling and compressed sensing. IEEE Access 2022, 10, 16969–16976. [Google Scholar] [CrossRef]
- Song, Y.C.; Wu, F.Y.; Ni, Y.Y.; Yang, K. A fast threshold OMP based on self-learning dictionary for propeller signal reconstruction. Ocean Eng. 2023, 287, 115792. [Google Scholar] [CrossRef]
- Bai, H.; Wen, L.; Ma, Y.; Jia, X. Compression Reconstruction and Fault Diagnosis of Diesel Engine Vibration Signal Based on Optimizing Block Sparse Bayesian Learning. Sensors 2022, 22, 3884. [Google Scholar] [CrossRef]
- Liu, H.; Sun, Y.; Chen, D.; Huang, T.; Hou, X.; Ren, Y.; Liu, X. An Optimized Vibration Signal Compressed Sensing Based on Phase Blocking K-SVD Algorithm for Marine Diesel Engine Cylinders. IEEE Trans. Instrum. Meas. 2025, 74, 1–22. [Google Scholar] [CrossRef]
- Lyu, F.; Wang, Y.; Mei, Y.; Li, F. A high-frequency measurement method of downhole vibration signal based on compressed sensing technology and its application in drilling tool failure analysis. IEEE Access 2023, 11, 129650–129659. [Google Scholar] [CrossRef]
- Ahmed, H.; Nandi, A.K. Condition Monitoring with Vibration Signals: Compressive Sampling and Learning Algorithms for Rotating Machines Part V; John Wiley & Sons: Hoboken, NJ, USA, 2020; pp. 321–377. [Google Scholar]
- Kato, Y.; Watahiki, S.; Otaka, M. Full-field measurements of high-frequency micro-vibration under operational conditions using sub-Nyquist-rate 3D-DIC and compressed sensing with order analysis. Mech. Syst. Signal Process. 2025, 224, 112179. [Google Scholar] [CrossRef]
- Candés, E.J.; Tao, T. Near-optimal signal recovery from random projections: Universal encoding strategies? IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Cai, T.T.; Wang, L. Orthogonal matching pursuit for sparse signal recovery with noise. IEEE Trans. Inf. Theory 2011, 57, 4680–4688. [Google Scholar] [CrossRef]
- Baraniuk, R. A lecture on compressive sensing. IEEE Signal Process. Mag. 2007, 24, 1–9. [Google Scholar] [CrossRef]
- Donoho, D.L.; Tanner, J. Exponential bounds implying construction of compressed sensing matrices, error-correcting codes, and neighborly polytopes by random sampling. IEEE Trans. Inf. Theory 2010, 56, 2002–2016. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Wang, J. Support recovery with orthogonal matching pursuit in the presence of noise. IEEE Trans. Signal Process. 2015, 63, 5868–5877. [Google Scholar] [CrossRef]
- Wen, J.; Zhou, Z.; Wang, J.; Tang, X.; Mo, Q. A sharp condition for exact support recovery with orthogonal matching pursuit. IEEE Trans. Signal Process. 2016, 65, 1370–1382. [Google Scholar] [CrossRef]
- Yang, M.; De Hoog, F. Orthogonal matching pursuit with thresholding and its application in compressive sensing. IEEE Trans. Signal Process. 2015, 63, 5479–5486. [Google Scholar] [CrossRef]
- Chen, S.; Cheng, Z.; Liu, C.; Xi, F. A blind stopping condition for orthogonal matching pursuit with applications to compressive sensing radar. Signal Process. 2019, 165, 331–342. [Google Scholar] [CrossRef]
- Rafiq, H. Condition Monitoring and Nonlinear Frequency Analysis Based Fault Detection of Mechanical Vibration Systems; Springer: Fachmedien, Wiesbaden, 2023. [Google Scholar]
- Yi, C.; Yu, Z.; Lv, Y.; Xiao, H. Reassigned second-order synchrosqueezing transform and its application to wind turbine fault diagnosis. Renew. Energy 2020, 161, 736–749. [Google Scholar] [CrossRef]
- Hou, B.; Wang, Y.; Tang, B.; Qin, Y.; Chen, Y.; Chen, Y. A tacholess order tracking method for wind turbine planetary gearbox fault detection. Measurement 2019, 138, 266–277. [Google Scholar] [CrossRef]
- Borghesani, P.; Pennacchi, P.; Randall, R.B.; Ricci, R. Order tracking for discrete-random separation in variable speed conditions. Mech. Syst. Signal Process. 2012, 30, 1–22. [Google Scholar] [CrossRef]
- Schmid, P. Dynamic mode decomposition and its variants. Annu. Rev. Fluid Mech. 2022, 54, 225–254. [Google Scholar] [CrossRef]
- Kato, Y.; Kumagai, R. Fault diagnosis of press dies using dynamic mode decomposition of a sound signal. J. Adv. Mech. Des. Syst. Manuf. 2023, 17, JAMDSM0040. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basis Type | Fourier | Order |
|---|---|---|
| Lower frequency limit: fbl | 0 [Hz] | 0 [-] |
| Upper frequency limit: fbh | fs/2 [Hz] | fs) [-] |
| Length of basis: n | fs Ts |
| Outer Diameter: Dout | Inside Diameter: Din | Rolling Element Diameter: d | Pitch Circle Diameter: Dp | Contact Angle: θc |
|---|---|---|---|---|
| 32 mm | 15 mm | 4.76 mm | 23.5 mm | 30° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kato, Y.; Otaka, M. Compressed Sensing of Vibration Signal for Fault Diagnosis of Bearings, Gears, and Propellers Under Speed Variation Conditions. Sensors 2025, 25, 3167. https://doi.org/10.3390/s25103167
Kato Y, Otaka M. Compressed Sensing of Vibration Signal for Fault Diagnosis of Bearings, Gears, and Propellers Under Speed Variation Conditions. Sensors. 2025; 25(10):3167. https://doi.org/10.3390/s25103167
Chicago/Turabian StyleKato, Yuki, and Masayoshi Otaka. 2025. "Compressed Sensing of Vibration Signal for Fault Diagnosis of Bearings, Gears, and Propellers Under Speed Variation Conditions" Sensors 25, no. 10: 3167. https://doi.org/10.3390/s25103167
APA StyleKato, Y., & Otaka, M. (2025). Compressed Sensing of Vibration Signal for Fault Diagnosis of Bearings, Gears, and Propellers Under Speed Variation Conditions. Sensors, 25(10), 3167. https://doi.org/10.3390/s25103167