
A Novel Multistep Wavelet Convolutional Transfer Diagnostic Framework for Cross-Machine Bearing Fault Diagnosis


Abstract
1. Introduction
- A cutting-edge framework—MSWCTD is introduced for cross-machine fault diagnosis scenarios, which integrates a wavelet convolutional network and transfer learning techniques. This method is designed to handle two tasks, data reconstruction and fault diagnosis, to distill generalizable and transferable features for fault diagnosis across different machines. The performance of this approach is assessed using four distinct datasets.
- A multistep time shift wavelet convolutional network (MTSWCN) based on wavelet transform and the time shift technique is proposed to explore the diversity of original vibration data and enhance feature expression ability. The proposed multistep time shift technique can fully utilize features extracted by MTSWCN and extract valuable features through the wavelet convolutional network. Furthermore, the multistep time shift technique improves data utilization and enhances diversity in feature extraction.
- A multi-view confusion transfer method (MVCT) is proposed to obtain transferable knowledge of fault diagnosis and identify the health status of rolling bearings across machines. The method mines features from the perspectives of probability distribution and information to improve transfer diagnosis ability.
2. Related Works
2.1. Transfer Learning
2.2. Wavelet Transform
3. The Multistep Wavelet Convolutional Transfer Diagnostic Method
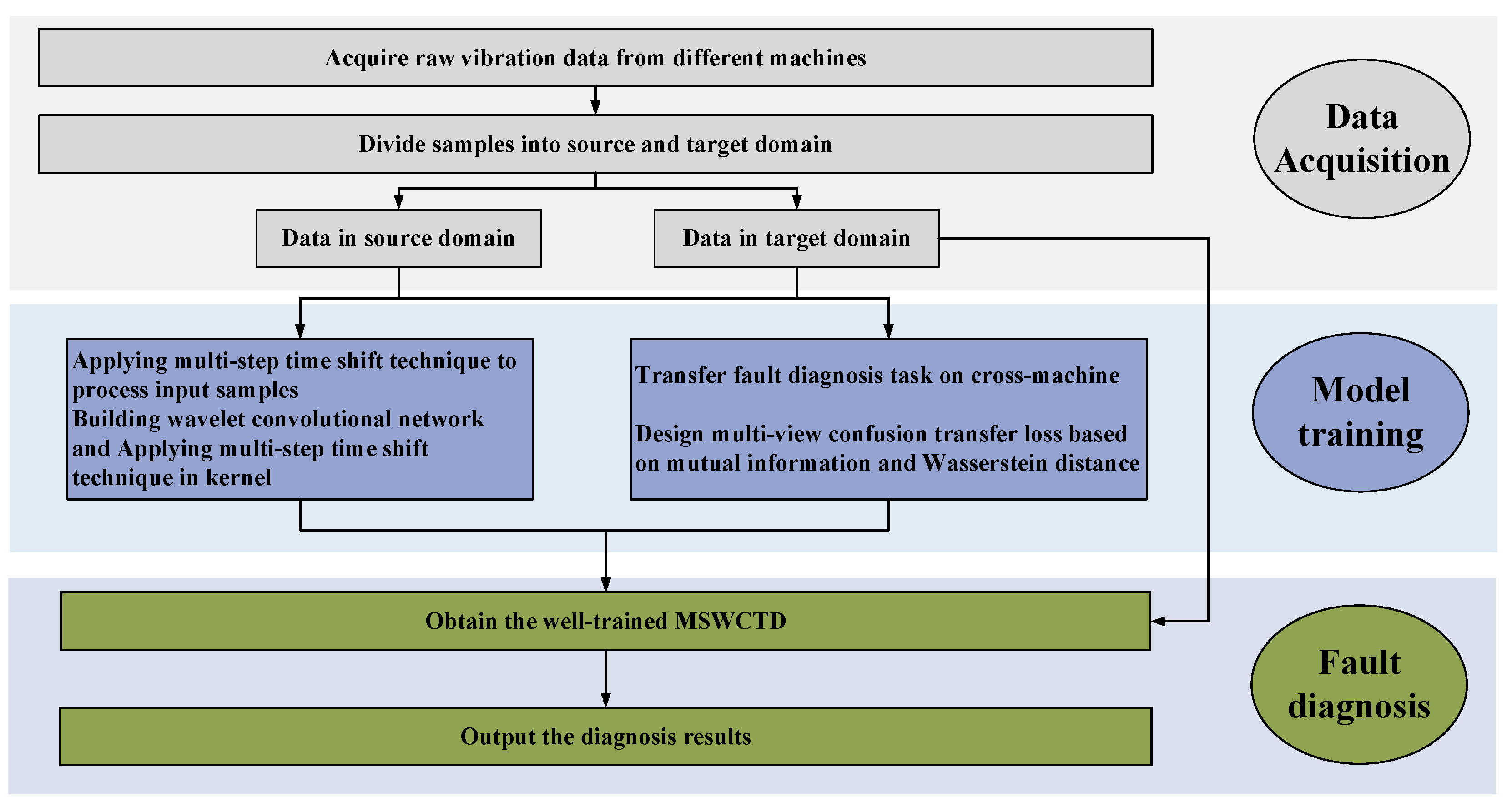
3.1. The Procedure of MSWCTD
| Algorithm 1: Datasets from different machines |
| 1. Randomly initialize: parameters θ of the proposed method 2. while not reaching the maximum number of iterations do: 3. calculate the output in Equation (6) 4. calculate the loss of transfer learning in Equation (9) 5. calculate the final loss in Equation (10) 6. update parameters with gradient descent: , where is the learning rate. 7. end while |
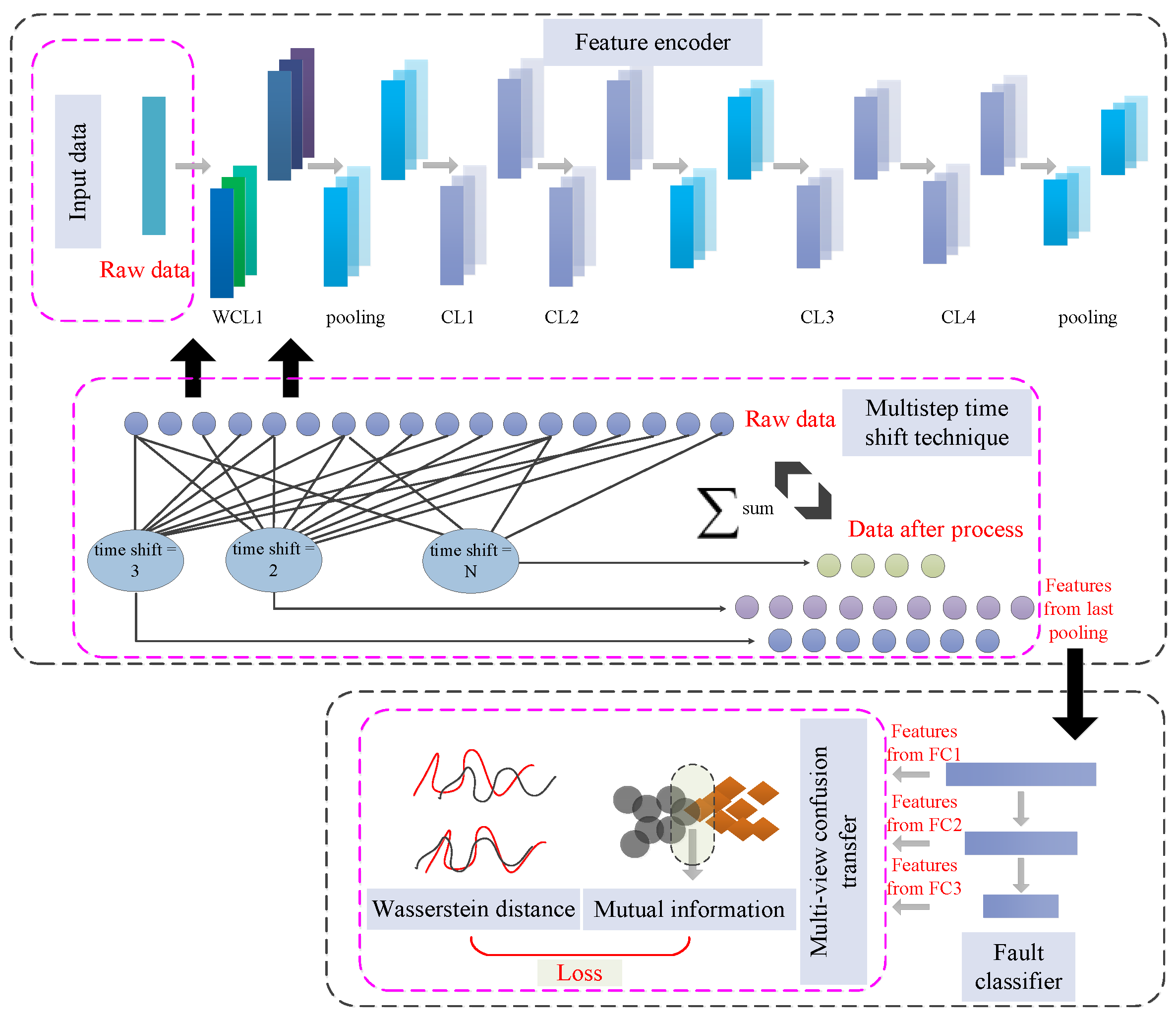
3.2. Multistep Time Shift Wavelet Convolutional Network
3.3. Multi-View Confusion Transfer
3.4. The Loss Function of MSWCTD
4. Case Verification
4.1. Case 1: CWRU and Ottawa
4.1.1. Dataset Description
4.1.2. Result Analysis
- TCA represents a seminal approach within the realm of transfer learning, employing MMD as its metric for aligning cross-domain data into a unified space to assess distributional disparities, without the integration of deep learning techniques.
- The foundational architecture of the DAN aligns with that of the proposed technique, with the key distinction being the absence of a decoder component. It employs multi-kernel MMD and assesses disparities in the multi-layer output features.
- EWSNet and DCC are the same as in the raw literature.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Accuracy on T-A (%) | Accuracy on T-B (%) |
|---|---|---|
| TCA | 63.33 | 59.17 |
| DAN | 78.33 | 74.17 |
| EWSNet | 90.00 | 91.67 |
| DCC | 92.50 | 88.33 |
| Ref. [35] | 95.83 | 95.00 |
| MSWCTD (this paper) | 100.00 | 98.33 |
4.1.3. Ablation Experiment
- (1)
- WCN-MVCT: A fault diagnosis model built by combining a single-scale wavelet convolutional network (WCN) with the multiview cross-domain transfer (MVCT) method.
- (2)
- MTSWCN-WD: A fault diagnosis model constructed by combining the multiscale time-shifted wavelet convolutional network (MTSWCN) with a single weighted distance (WD) metric.
- (3)
- MSWCTD: The method proposed in this paper.
4.2. Case 2: SEU and CWRU
4.2.1. Dataset
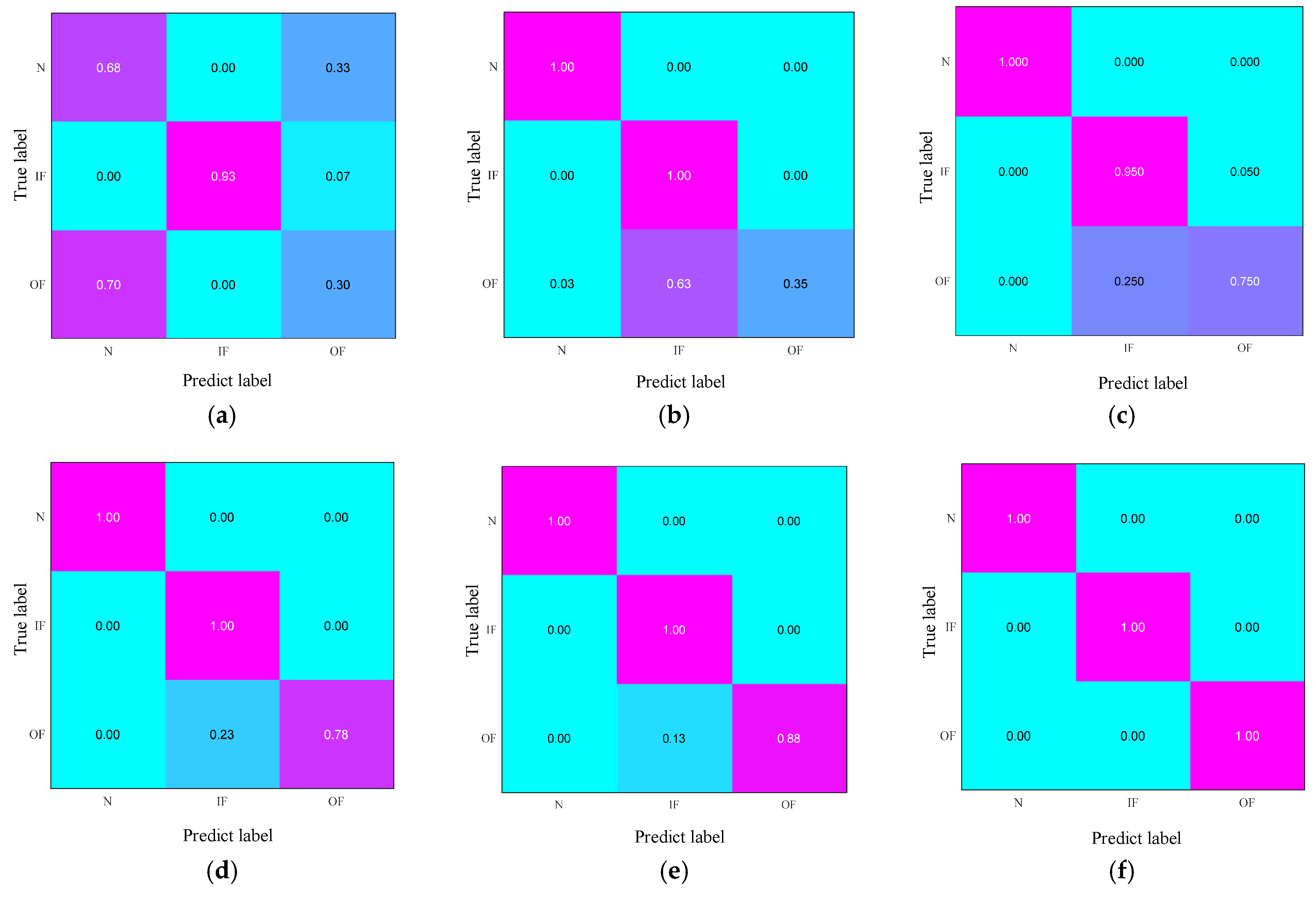
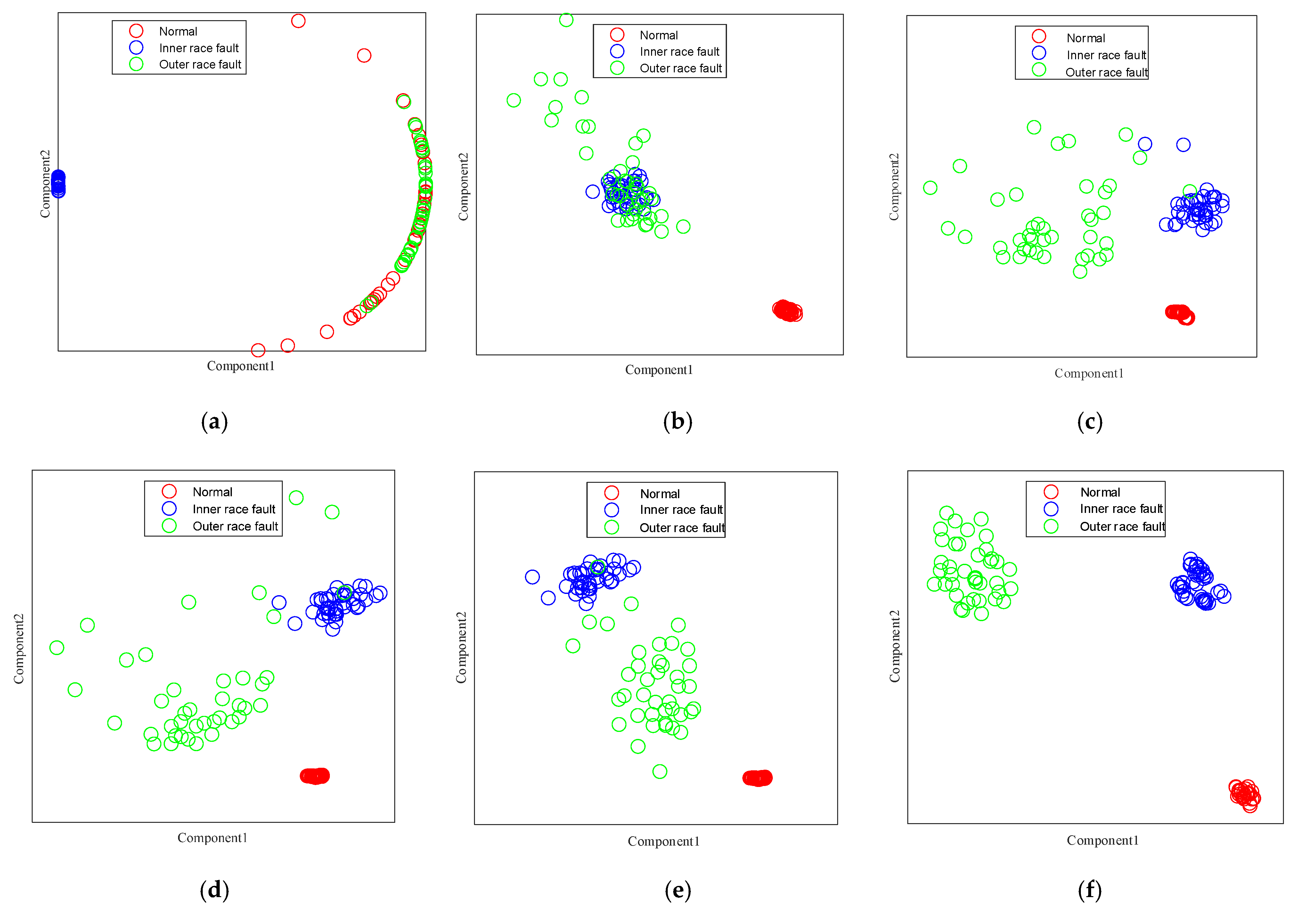
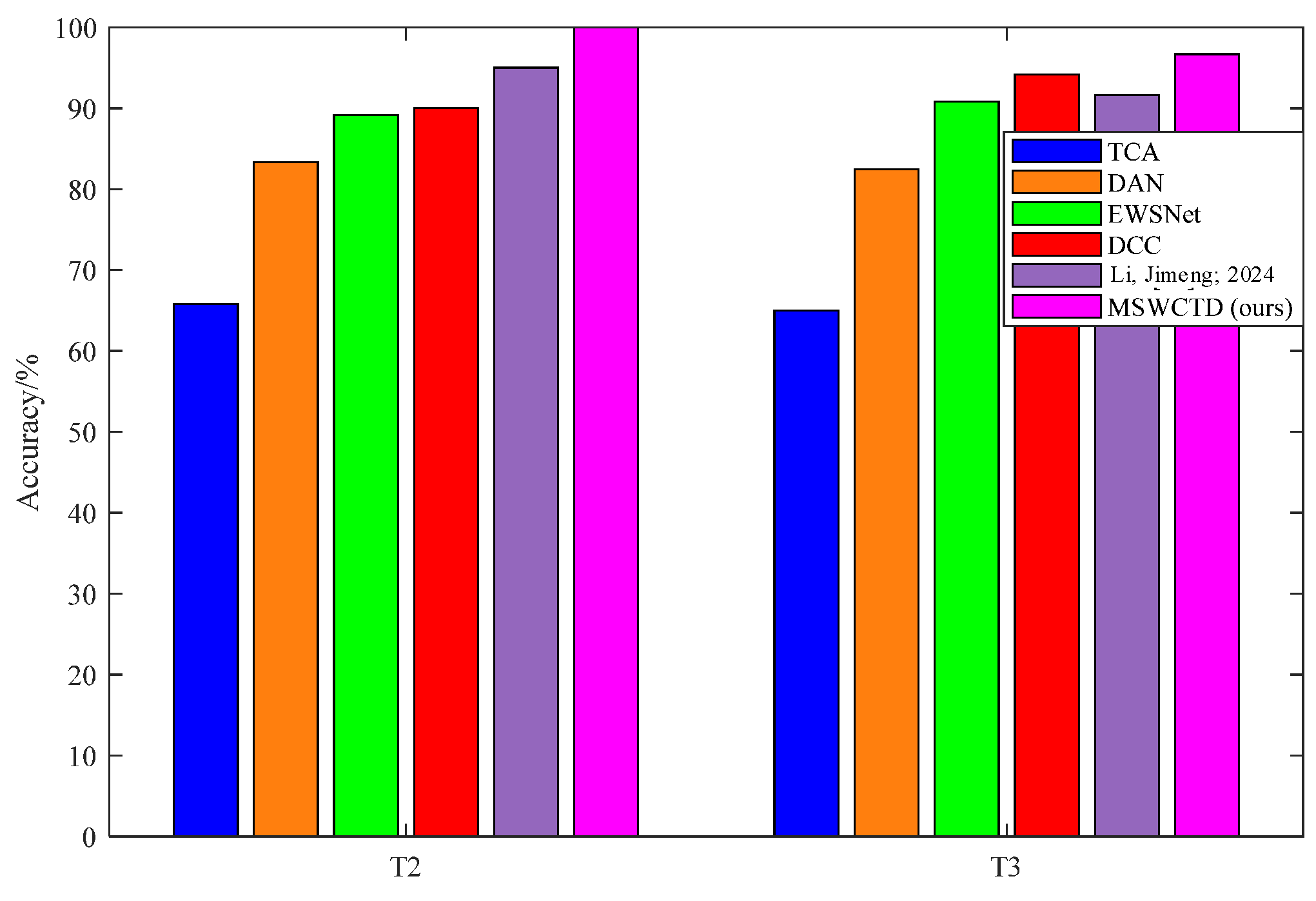
4.2.2. Result Analysis
4.2.3. Computational Efficiency
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fang, H.; An, J.; Sun, B.; Chen, D.; Bai, J.; Liu, H.; Wu, Y. Empowering intelligent manufacturing with edge computing: A portable diagnosis and distance localization approach for bearing faults. Adv. Eng. Inform. 2024, 59, 102246. [Google Scholar] [CrossRef]
- Su, H.; Xiang, L.; Hu, A.; Gao, B.; Yang, X. A novel hybrid method based on KELM with SAPSO for fault diagnosis of rolling bearing under variable operating conditions. Measurement 2021, 177, 109276. [Google Scholar] [CrossRef]
- Zheng, J.; Cao, S.; Pan, H.; Ni, Q. Spectral envelope-based adaptive empirical Fourier decomposition method and its application to rolling bearing fault diagnosis. ISA Trans. 2022, 129, 476–492. [Google Scholar] [CrossRef]
- Kiranov, D.M.; Ryndin, M.A.; Kozlov, I.S. Active learning and transfer learning for document segmentation. Program. Comput. Softw. 2023, 49, 566–573. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Zhu, H.; Huang, Z.; Lu, B.; Cheng, F.; Zhou, C. Imbalance domain adaptation network with adversarial learning for fault diagnosis of rolling bearing. Signal Image Video Process. 2022, 16, 2249–2257. [Google Scholar] [CrossRef]
- Yan, J.; Cheng, Y.; Wang, Q.; Liu, L.; Zhang, W.; Jin, B. Transformer and Graph Convolution-Based Unsupervised Detection of Machine Anomalous Sound Under Domain Shifts. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 8, 2827–2842. [Google Scholar] [CrossRef]
- Xie, J.; Zhang, L.; Duan, L.; Wang, J. On Cross-Domain Feature Fusion in Gearbox Fault Diagnosis Under Various Operating Conditions Based on Transfer Component Analysis. In Proceedings of the IEEE International Conference on Prognostics and Health Management, Ottawa, ON, Canada, 20–22 June 2016; pp. 1–6. [Google Scholar]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Liang, K. Residual joint adaptation adversarial network for intelligent transfer fault diagnosis. Mech. Syst. Signal Process. 2020, 145, 106962. [Google Scholar] [CrossRef]
- Chunfeng, W.; Zheng, L.; Jun, Z.; Wei, W. Heterogeneous Transfer Learning Based on Stack Sparse Auto-Encoders for Fault Diagnosis. In Proceedings of the Chinese Automation Congress, Xi’an, China, 30 November–2 December 2018; pp. 4277–4281. [Google Scholar]
- Li, X.; Zhang, W.; Ding, Q. A robust intelligent fault diagnosis method for rolling element bearings based on deep distance metric learning. Neurocomputing 2018, 310, 77–95. [Google Scholar] [CrossRef]
- Tahri, O.; Usman, M.; Demonceaux, C.; Fofi, D.; Hittawe, M.M. Fast Earth Mover’s Distance Computation for Catadioptric Image Sequences. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 2485–2489. [Google Scholar]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. A transfer learning method for intelligent fault diagnosis from laboratory machines to real-case machines. In Proceedings of the International Conference on Sensing, Diagnostics, Prognostics, and Control, Xi’an, China, 15–17 August 2018; pp. 35–40. [Google Scholar]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. An intelligent fault diagnosis approach based on transfer learning from laboratory bearings to locomotive bearings. Mech. Syst. Signal Process. 2019, 122, 692–706. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep convolutional transfer learning network: A new method for intelligent fault diagnosis of machines with unlabeled data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Yan, J.; Cheng, Y.; Zhang, F.; Zhou, N.; Wang, H.; Jin, B.; Zhang, W. Multimodal Imitation Learning for Arc Detection in Complex Railway Environments. IEEE Trans. Instrum. Meas. 2025, 74, 3529413. [Google Scholar] [CrossRef]
- Cheng, Y.; Yan, J.; Zhang, F.; Li, M.; Zhou, N.; Shi, C.; Zhang, W. Surrogate modeling of pantograph-catenary system interactions. Mech. Syst. Signal Process. 2025, 224, 112134. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, X. Separation of fault characteristic impulses of flexible thin-wall bearing based on wavelet transform and correlated Gini index. Mech. Syst. Signal Process. 2024, 209, 111118. [Google Scholar] [CrossRef]
- Fu, X.; Tao, J.; Jiao, K.; Liu, C. A novel semi-supervised prototype network with two-stream wavelet scattering convolutional encoder for TBM main bearing few-shot fault diagnosis. Knowl.-Based Syst. 2024, 286, 111408. [Google Scholar] [CrossRef]
- Wang, J.; Guo, J.; Wang, L.; Yang, Y.; Wang, Z.; Wang, R. A hybrid intelligent rolling bearing fault diagnosis method combining WKN-BiLSTM and attention mechanism. Meas. Sci. Technol. 2023, 34, 85106. [Google Scholar] [CrossRef]
- He, C.; Shi, H.; Liu, X.; Li, J. Interpretable physics-informed domain adaptation paradigm for cross-machine transfer diagnosis. Knowl.-Based Syst. 2024, 288, 111499. [Google Scholar] [CrossRef]
- Hakim, M.; Omran, A.A.B.; Ahmed, A.N.; Al-Waily, M.; Abdellatif, A. A systematic review of rolling bearing fault diagnoses based on deep learning and transfer learning: Taxonomy, overview, application, open challenges, weaknesses and recommendations. Ain Shams Eng. J. 2023, 14, 101945. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, S.; Zhu, Y.; Ke, W. Cross-domain bearing fault diagnosis using dual-path convolutional neural networks and multi-parallel graph convolutional networks. ISA Trans. 2024, 152, 129–142. [Google Scholar] [CrossRef]
- Guo, Z.; Xu, L.; Zheng, Y.; Xie, J.; Wang, T. Bearing fault diagnostic framework under unknown working conditions based on condition-guided diffusion model. Measurement 2025, 242, 115951. [Google Scholar] [CrossRef]
- Fang, L.; Liu, Y.; Li, X.; Chang, J. Intelligent Fault Diagnosis of Rolling Bearing Based on Deep Transfer Learning. In Proceedings of the 6th International Conference on Natural Language Processing (ICNLP), Xi’an, China, 22–24 March 2024; pp. 753–757. [Google Scholar]
- Gao, Z.; Zheng, J.; Pan, H.; Cheng, J.; Tong, J. Adaptive generalized empirical wavelet transform and its application to fault diagnosis of rolling bearing. Measurement 2025, 249, 116958. [Google Scholar] [CrossRef]
- He, C.; Shi, H.; Si, J.; Li, J. Physics-informed interpretable wavelet weight initialization and balanced dynamic adaptive threshold for intelligent fault diagnosis of rolling bearings. J. Manuf. Syst. 2023, 70, 579–592. [Google Scholar] [CrossRef]
- Bouindour, S.; Hittawe, M.M.; Mahfouz, S.; Snoussi, H. Abnormal Event Detection Using Convolutional Neural Networks and 1-Class SVM classifier. In Proceedings of the 8th International Conference on Imaging for Crime Detection and Prevention (ICDP 2017), Madrid, Spain, 13–15 December 2017; pp. 1–6. [Google Scholar]
- Hu, T.; Guo, Y.; Gu, L.; Zhou, Y.; Zhang, Z.; Zhou, Z. Remaining useful life estimation of bearings under different working conditions via Wasserstein distance-based weighted domain adaptation. Reliab. Eng. Syst. Saf. 2022, 224, 108526. [Google Scholar] [CrossRef]
- Yan, X.A.; Liu, Y.; Jia, M.P. Multiscale cascading deep belief network for fault identification of rotating machinery under various working conditions. Knowl.-Based Syst. 2020, 193, 105484. [Google Scholar] [CrossRef]
- Mert Sehri, Patrick Dumond, Michel Bouchard, University of Ottawa constant load and speed rolling-element bearing vibration and acoustic fault signature datasets. Data Brief 2023, 49, 109327. [CrossRef]
- Li, G.; Kang, G.; Zhu, Y.; Wei, Y.; Yang, Y. Domain Consensus Clustering for Universal Domain Adaptation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 9752–9761. [Google Scholar]
- Li, B.T.; Pi, D.C.; Lin, Y.X. Learning ladder neural networks for semi-supervised node classification in social network. Expert Syst. Appl. 2021, 165, 113957. [Google Scholar] [CrossRef]
- Li, J.; Ye, Z.; Gao, J.; Meng, Z.; Tong, K.; Yu, S. Fault transfer diagnosis of rolling bearings across different devices via multi-domain information fusion and multi-kernel maximum mean discrepancy. Appl. Soft Comput. 2024, 159, 111620. [Google Scholar] [CrossRef]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly Accurate Machine Fault Diagnosis Using Deep Transfer Learning. IEEE Trans. Ind. Inform. 2018, 15, 2446–2455. [Google Scholar] [CrossRef]

| Modules | Description of Layer | Parameter |
|---|---|---|
| Feature encoder | Kernel shape of WCL1 | 1 ∗ 64 |
| Channels | (1,32) | |
| Kernel shape and stride of pooling operation | 2 ∗ 2/2 | |
| Kernel shape of CL1 | 1 ∗ 3 | |
| Channels | (32,32) | |
| Kernel shape of CL2 | 1 ∗ 3 | |
| Channels | (32,32) | |
| Kernel shape and stride of pooling operation | 2 ∗ 2/2 | |
| Kernel shape of CL3 | 1 ∗ 3 | |
| Channels | (32,16) | |
| Kernel shape of CL4 | 1 ∗ 3 | |
| Channels | (16,16) | |
| Kernel shape and stride of pooling operation | 2 ∗ 2/2 | |
| Classifier | The neurons in FC1 | 16 ∗ 120/1024 |
| The neurons in FC2 | 1024/256 | |
| The neurons in FC3 | 256/3 |
| No. | Source Dataset | Target Dataset | Health Condition | The Number of Samples |
|---|---|---|---|---|
| T-A | CWRU | Ottawa | Normal | 40 |
| Inner race fault | ||||
| Outer race fault | ||||
| T-B | Ottawa | CWRU | Normal | 40 |
| Inner race fault | ||||
| Outer race fault |
| Approach | Accuracy on T-A (%) | Accuracy on T-B (%) |
|---|---|---|
| WCN-MVCT | 86.67 | 85.83 |
| MTSWCN-WD | 90.83 | 91.67 |
| MSWCTD (this paper) | 100.00 | 98.33 |
| No. | Source Dataset | Target Dataset | Health Condition | The Number of Samples |
|---|---|---|---|---|
| T-C | CWRU 1 | SEU | N | 40 |
| IF | ||||
| OF | ||||
| T-D | SEU 2 | CWRU | N | 40 |
| IF | ||||
| OF |
| Method | Accuracy of T-C (%) | Accuracy of T-D (%) |
|---|---|---|
| TCA | 65.83 | 65.00 |
| DAN | 83.33 | 82.50 |
| EWSNet | 89.17 | 90.83 |
| DCC | 90.00 | 94.17 |
| Ref. [35] | 95.00 | 91.67 |
| MSWCTD (this paper) | 100.00 | 96.67 |
| Method | Model Parameters/MB | FLOPs/GB | Inference Time/s |
|---|---|---|---|
| TCA | \ | \ | 2.76 |
| DAN | 1.12 | 0.006 | 0.45 |
| EWSNet | 1.28 | 0.007 | 0.78 |
| DCC | 1.87 | 0.011 | 0.88 |
| Ref. [35] | 1.22 | 0.006 | 0.50 |
| MSWCTD (this paper) | 1.26 | 0.007 | 0.56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; He, Y.; Zheng, H.; Dai, D. A Novel Multistep Wavelet Convolutional Transfer Diagnostic Framework for Cross-Machine Bearing Fault Diagnosis. Sensors 2025, 25, 3141. https://doi.org/10.3390/s25103141
Zhao L, He Y, Zheng H, Dai D. A Novel Multistep Wavelet Convolutional Transfer Diagnostic Framework for Cross-Machine Bearing Fault Diagnosis. Sensors. 2025; 25(10):3141. https://doi.org/10.3390/s25103141
Chicago/Turabian StyleZhao, Lujia, Yuling He, Hai Zheng, and Derui Dai. 2025. "A Novel Multistep Wavelet Convolutional Transfer Diagnostic Framework for Cross-Machine Bearing Fault Diagnosis" Sensors 25, no. 10: 3141. https://doi.org/10.3390/s25103141
APA StyleZhao, L., He, Y., Zheng, H., & Dai, D. (2025). A Novel Multistep Wavelet Convolutional Transfer Diagnostic Framework for Cross-Machine Bearing Fault Diagnosis. Sensors, 25(10), 3141. https://doi.org/10.3390/s25103141