
Research on Collision Access Method for Satellite Internet of Things Based on Bayliss Window Function




Abstract
1. Introduction
- ▪
- To overcome throughput limitations imposed by fixed auxiliary beam patterns, we propose a novel auxiliary beam design scheme utilizing Bayliss window function-based optimization. This scheme generates a main lobe with a central null and precisely controlled roll-off regions to enhance power gain disparities between colliding signals.
- ▪
- Simulations validate the superiority of the proposed scheme over existing methods, demonstrating a 108% improvement in collision resolution success rate compared to prior auxiliary beam adjustments. Moreover, the proposed scheme exhibits strong robustness, achieving a 28% peak throughput improvement by combining angle and amplitude–phase errors.
2. System Model
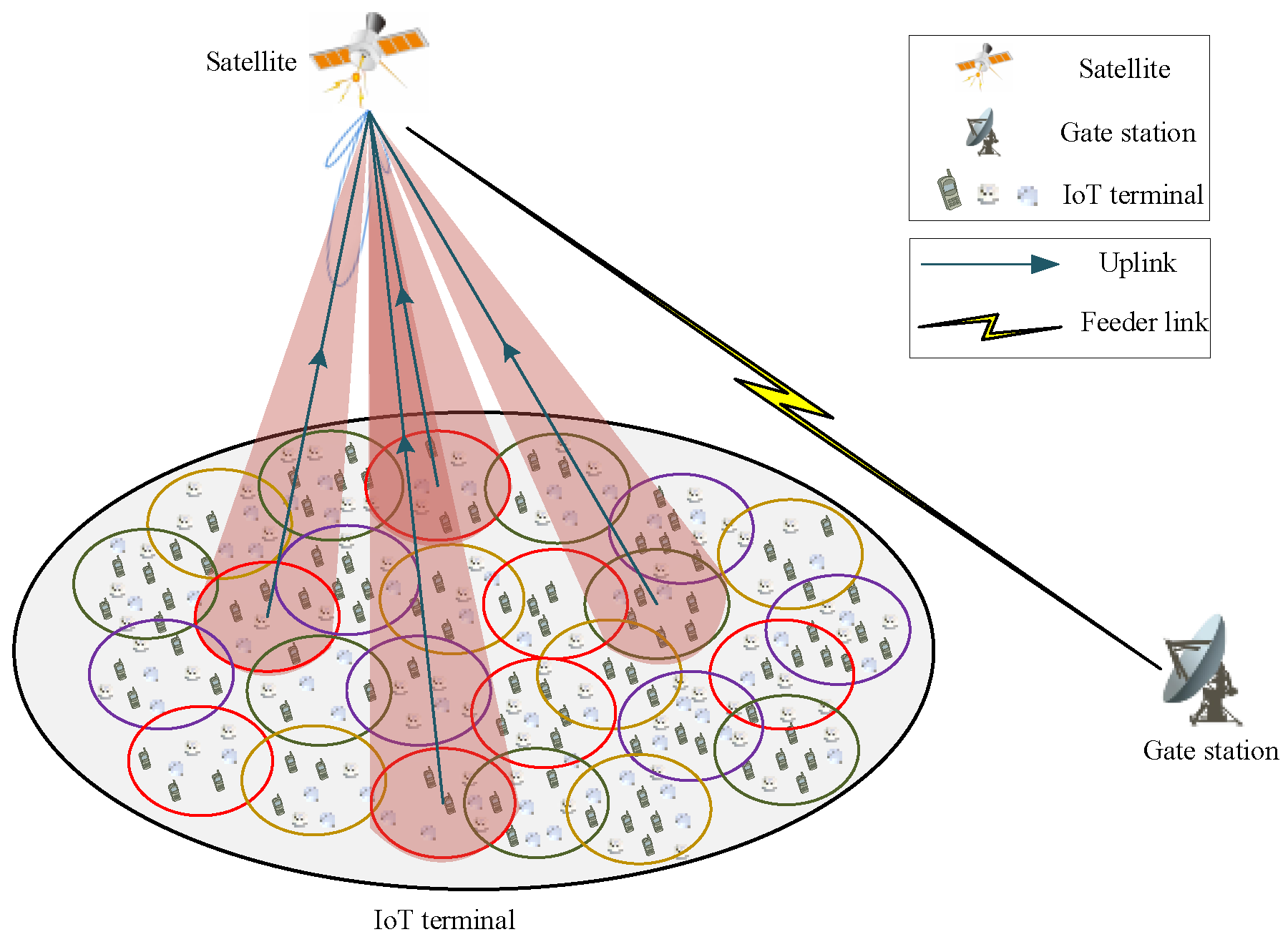
2.1. Signal Access Scenario
2.2. System Access Model
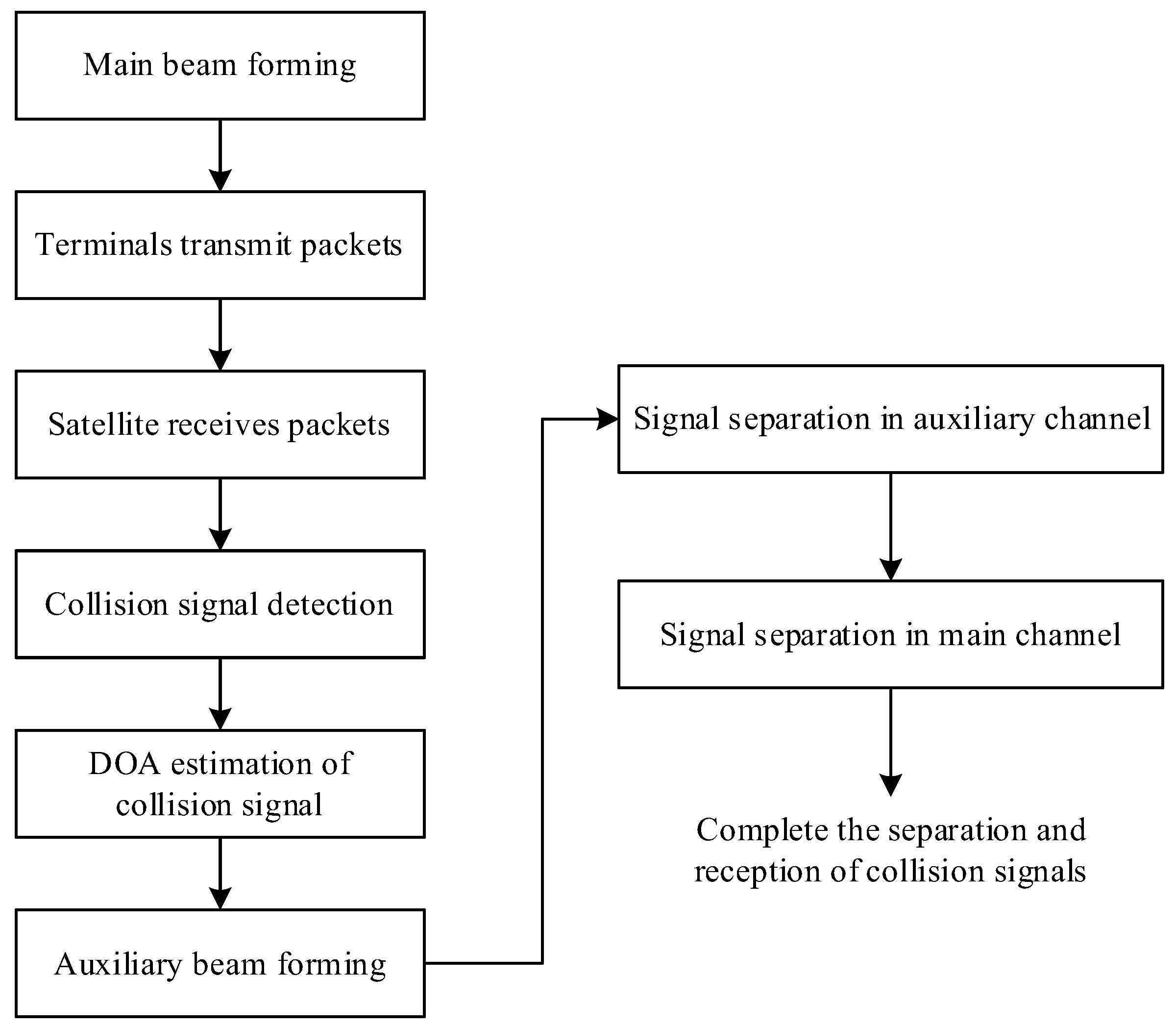
2.3. Overall Process
3. Methods
3.1. Basic Principle of Bayliss Weighting Method
3.2. Establishment of Optimization Model
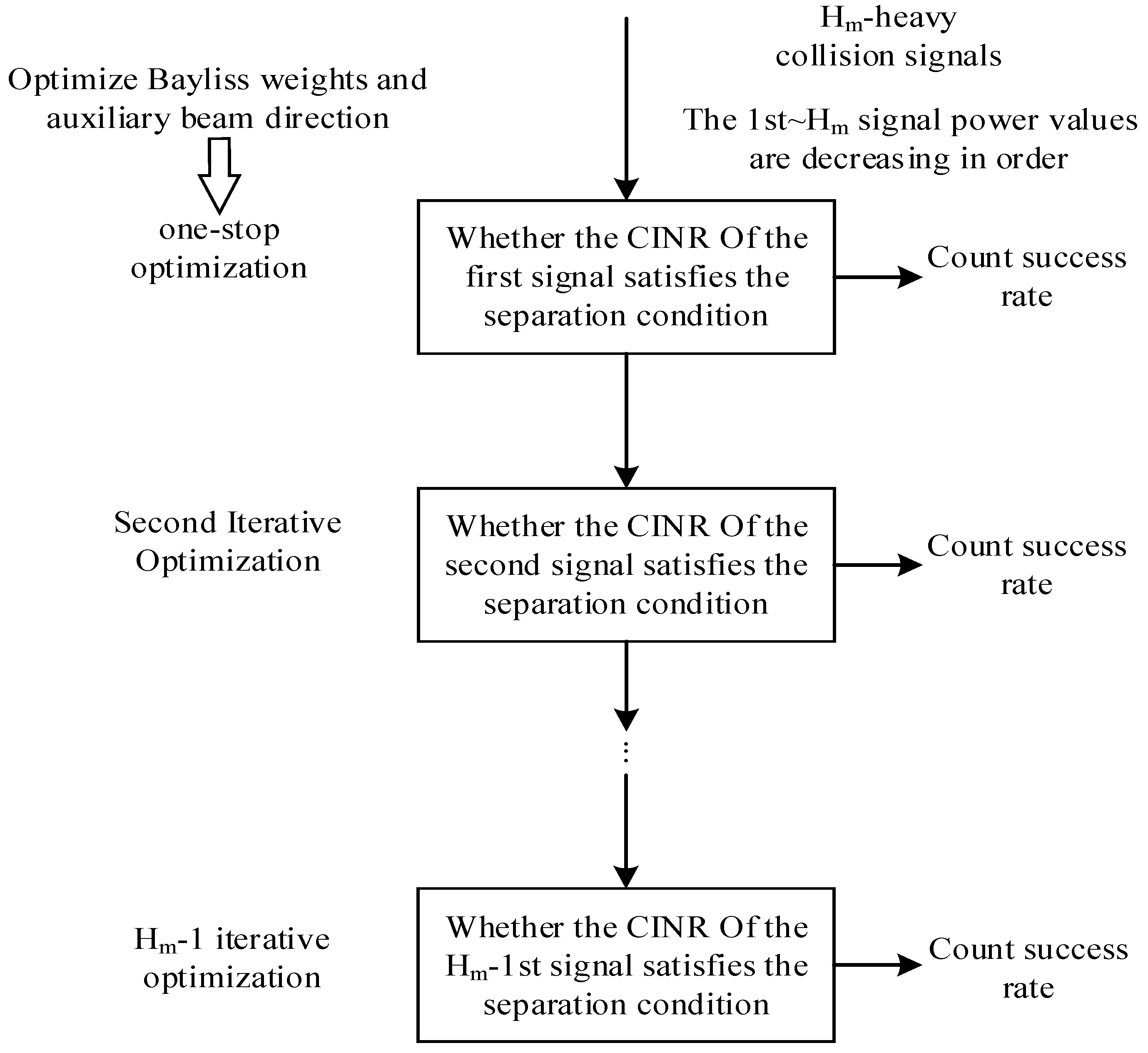
3.3. Optimization Model Solution
4. Results
4.1. System Access Performance Analysis
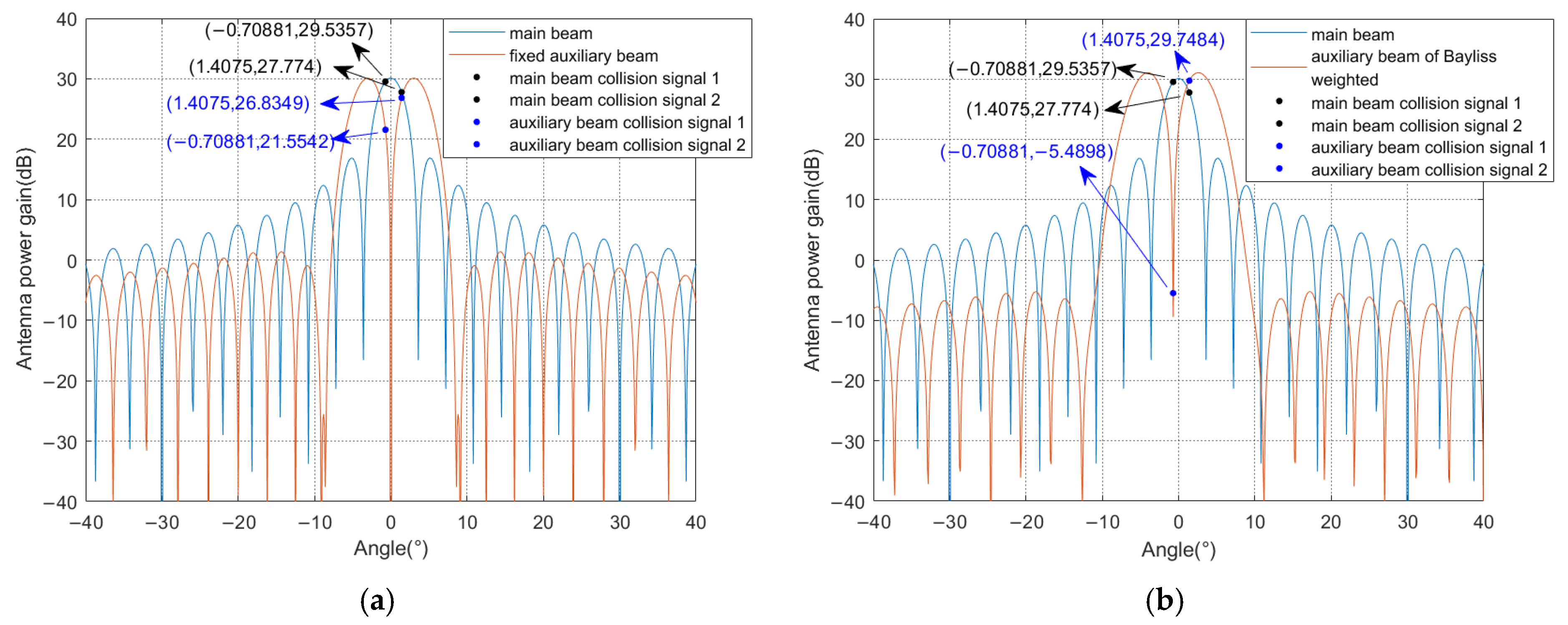
4.1.1. Example of Collision Signal Separation
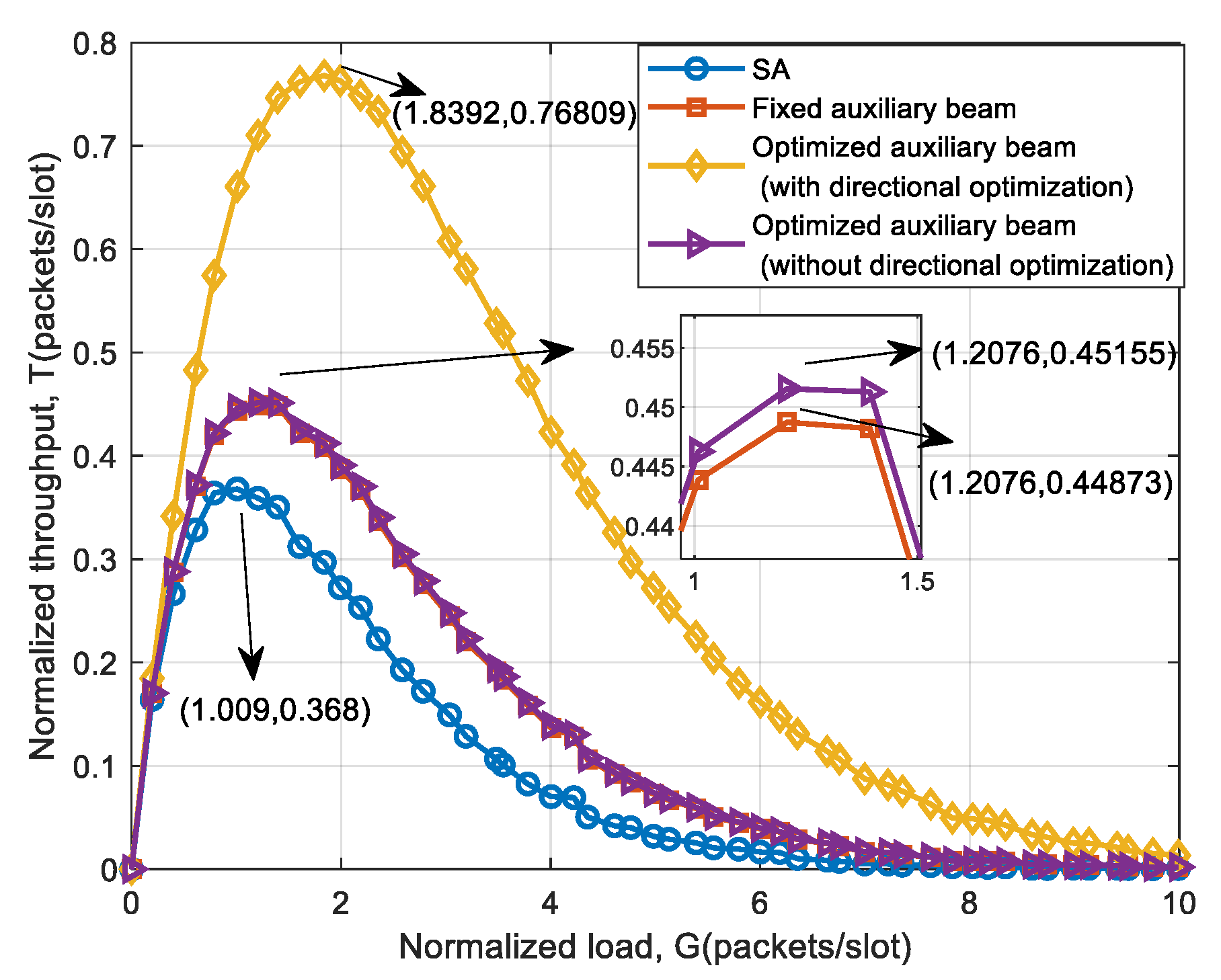
4.1.2. Access Performance Without Error
4.2. Error Robustness Analysis
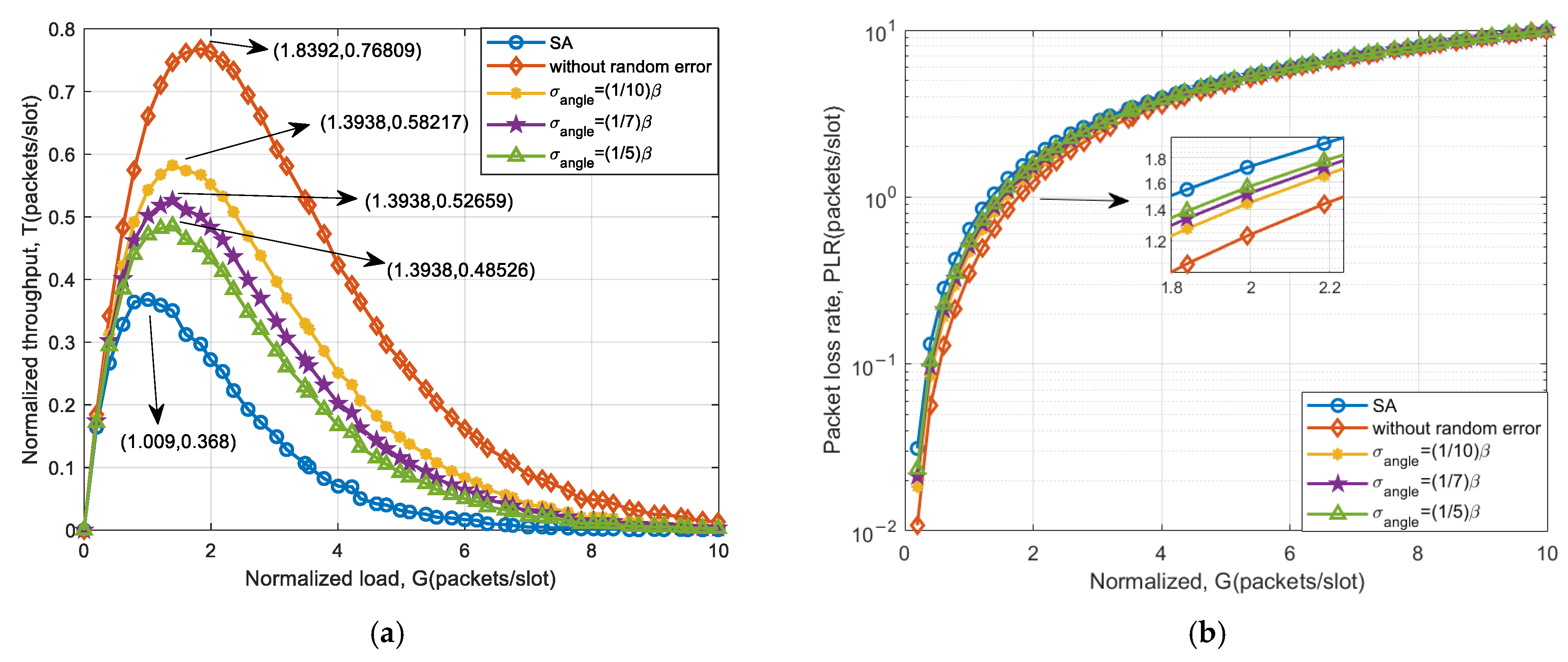
4.2.1. Estimation Error of DOA
4.2.2. Estimation Error of Amplitude and Phase
4.2.3. Estimation Errors of DOA and Amplitude–Phase
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cioni, S.; Gaudenzi, R.D.; Herrero, O.D.R.; Girault, N. On the Satellite Role in the Era of 5G Massive Machine Type Communications. IEEE Netw. 2018, 32, 54–61. [Google Scholar] [CrossRef]
- Chien, W.C.; Lai, C.F.; Hossain, M.S.; Muhammad, G. Heterogeneous Space and Terrestrial Integrated Networks for IoT: Architecture and Challenges. IEEE Netw. 2019, 33, 15–21. [Google Scholar] [CrossRef]
- Yu, H.G.; Fang, Z.X. LEO satellite Internet: Development, application and new technology prospects. Radio Eng. 2023, 52, 2699–2707. [Google Scholar]
- Zhang, G.X.; Wang, Y.F.; Ding, X.J.; Hong, T.; Liu, Z.W.; Zhang, C. Research on several key technologies of satellite Internet. J. Commun. 2021, 42, 1–14. [Google Scholar] [CrossRef]
- Abramson, N. The ALOHA system: Another alternative for computer communications. In Proceedings of the the Fall Joint Computer Conference, New York, NY, USA, 17–19 November 1970; pp. 281–285. [Google Scholar]
- Roberts, L.G. ALOHA packet system with and without slots and capture. ACM SIGCOMM Comput. Commun. Rev. 1975, 5, 28–42. [Google Scholar] [CrossRef]
- Choudhury, G.; Rappaport, S. Diversity ALOHA-A Random Access Scheme for Satellite Communications. IEEE Trans. Commun. 1983, 31, 450–457. [Google Scholar] [CrossRef]
- Casini, E.; Gaudenzi, R.D.; Herrero, O.D.R. Contention Resolution Diversity Slotted ALOHA (CRDSA): An Enhanced Random Access Schemefor Satellite Access Packet Networks. IEEE Trans. Wirel. Commun. 2007, 6, 1408–1419. [Google Scholar] [CrossRef]
- Gaudenzi, R.D.; del Rio Herrero, O. Advances in Random Access protocols for satellite networks. In Proceedings of the 2009 International Workshop on Satellite and Space Communications, Siena, Italy, 9–11 September 2009; pp. 331–336. [Google Scholar] [CrossRef]
- Liva, G. Graph-Based Analysis and Optimization of Contention Resolution Diversity Slotted ALOHA. IEEE Trans. Commun. 2011, 59, 477–487. [Google Scholar] [CrossRef]
- Paolini, E.; Liva, G.; Chiani, M. Coded Slotted ALOHA: A Graph-Based Method for Uncoordinated Multiple Access. IEEE Trans. Inf. Theory 2015, 61, 6815–6832. [Google Scholar] [CrossRef]
- Wang, Q.; Ren, G.; Gao, S.; Wu, K. A Framework of Non-Orthogonal Slotted Aloha (NOSA) Protocol for TDMA-Based Random Multiple Access in IoT-Oriented Satellite Networks. IEEE Access 2018, 6, 77542–77553. [Google Scholar] [CrossRef]
- Bai, J.; Ren, G. Polarized MIMO Slotted ALOHA Random Access Scheme in Satellite Network. IEEE Access 2017, 5, 26354–26363. [Google Scholar] [CrossRef]
- Liu, Y.; Qin, Z.; Elkashlan, M.; Ding, Z.; Nallanathan, A.; Hanzo, L. Nonorthogonal Multiple Access for 5G and Beyond. Proc. IEEE 2017, 105, 2347–2381. [Google Scholar] [CrossRef]
- Wieselthier, J.E.; Ephremides, A.; Michaels, L.A. An exact analysis and performance evaluation of framed ALOHA with capture. IEEE Trans. Commun. 1989, 37, 125–137. [Google Scholar] [CrossRef]
- Kan, P.C.; Wang, Z.N.; Kong, H.C.; Ou-yang, J.; Lin, M. Robust beamforming algorithm for multi beam satellite communication based on downlink NOMA. Space-Integr.-Ground Inf. Netw. 2021, 2, 53–59. [Google Scholar]
- Chu, J.; Chen, X.; Zhong, C.; Zhang, Z. Robust Design for NOMA-Based Multibeam LEO Satellite Internet of Things. IEEE Internet Things J. 2021, 8, 1959–1970. [Google Scholar] [CrossRef]
- Ramatryana, I.N.A.; Shin, S.Y. NOMA-Based CRDSA with Access Control for Next-Generation IoT Networks. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 20–22 October 2021; pp. 997–1001. [Google Scholar] [CrossRef]
- Alvi, S.; Durrani, S.; Zhou, X. Enhancing CRDSA With Transmit Power Diversity for Machine-Type Communication. IEEE Trans. Veh. Technol. 2018, 67, 7790–7794. [Google Scholar] [CrossRef]
- Clazzer, F.; Paolini, E.; Mambelli, I.; Stefanović, Č. Irregular repetition slotted ALOHA over the Rayleigh block fading channel with capture. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Shao, X.; Sun, Z.; Yang, M.; Gu, S.; Guo, Q. NOMA-Based Irregular Repetition Slotted ALOHA for Satellite Networks. IEEE Commun. Lett. 2019, 23, 624–627. [Google Scholar] [CrossRef]
- Xu, Y.Y.; Liu, Z.W.; Bian, D.M.; Zhang, G.X. Power-domain collision-tolerant random access method with auxiliary beam for satellite Internet of Things: A new solution. China Commun. 2024, 21, 236–248. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, Y.Q.; Wu, S.L.; Ma, Y.X.; Zhang, C. Detection of Non-Cooperative Burst Signals Employing Continuity in Frequency Domain. Trans. Beijing Inst. Technol. 2012, 10, 1071–1076. [Google Scholar] [CrossRef]
- Wu, D.; Ge, L.D.; Wang, B. Adaptive blind presence detection algorithm for burst signals. J. Comput. Appl. 2010, 30, 2221–2223. [Google Scholar] [CrossRef]
- Guo, S.H.; Hu, G.P.; Zhao, F.Z.; Zhou, H.; Zhang, Y.L. A DOA Estimation Based on Deep Convolutional Neural Network. J. Air Force Eng. Univ. 2023, 24, 62–68. [Google Scholar] [CrossRef]
- Zhang, M.Y.; Cha, S.Y.; Liu, Y.D. MUSIC Algorithm Based on Eigenvalue Clustering. J. Northwestern Polytech. Univ. 2023, 41, 574–578. [Google Scholar] [CrossRef]
- Liu, C.; Yue, X.; Zhang, J.; Shi, K. Active Disturbance Rejection Control for Delayed Electromagnetic Docking of Spacecraft in Elliptical Orbits. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2257–2268. [Google Scholar] [CrossRef]
- Lyu, B.; Liu, C.; Yue, X. Integrated Predictor–Observer Feedback Control for Vibration Mitigation of Large-Scale Spacecraft With Unbounded Input Time Delay. IEEE Trans. Aerosp. Electron. Syst. 2025, 61, 4561–4572. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polynomial Coefficients | Sidelobe Level/dB | |||||
|---|---|---|---|---|---|---|
| −15 | −20 | −25 | −30 | −35 | −40 | |
| 1.0079 | 1.2247 | 1.4355 | 1.6413 | 1.8431 | 2.0415 | |
| 1.5124 | 1.6962 | 1.8826 | 2.0708 | 2.2602 | 2.4504 | |
| 2.2561 | 2.3698 | 2.4943 | 2.6275 | 2.7675 | 2.9123 | |
| 3.1693 | 3.2473 | 3.3351 | 3.4314 | 3.5352 | 3.6452 | |
| 4.1264 | 4.1854 | 4.2527 | 4.3276 | 4.4093 | 4.4973 | |
| R | |||||
|---|---|---|---|---|---|
| 0.30387530 | −0.05042922 | −0.00027989 | −0.00000343 | −0.0000002 | |
| 0.98583020 | −0.03338850 | 0.00014064 | 0.00000190 | 0.0000001 | |
| 2.00337487 | −0.01141548 | 0.00041590 | 0.00000373 | 0.0000001 | |
| 3.00636321 | −0.00683394 | 0.00029281 | 0.00000161 | 0.0000000 | |
| 4.00518423 | −0.00501795 | 0.00021735 | 0.00000088 | 0.0000000 |
| Parameter | Value |
|---|---|
| Carrier frequency (GHz) | 2 |
| Distance from satellite to Earth (km) | 1000 |
| Terminal transmission gain (dBi) | 0 |
| Bandwidth (kHz) | 20 |
| Interval of array elements (m) | wavelength/2 |
| Terminal transmission power (dBW) | −10 |
| Equivalent noise temperature (K) | 290 |
| Separation threshold (dB) | 10 |
| Auxiliary Beam Type | System Throughput Improvement |
|---|---|
| Fixed auxiliary beam | 21.94% |
| Optimized auxiliary beam (without directional optimization) | 22.70% |
| Optimized auxiliary beam (with directional optimization) | 108.72% |
| Number of Array Elements | Beamwidth | DOA of Collision Signal | Estimation Error of DOA | Amplitude–Phase Error |
|---|---|---|---|---|
| 32 | 3.2° | Random value of [−1.6°, 1.6°] | Obey a normal distribution with a mean of 0 and a standard deviation | The phase error of the array element channel follows a uniformly distributed random value of 0.01–0.05, and the amplitude gain error of the array element follows a uniformly distributed random value of 0.06–0.1 |
| 10 | 10.2° | Random value of [−5.1°, 5.1°] |
| Beamwidth | System Throughput Improvement | ||
|---|---|---|---|
| Without Error | |||
| 3.2° | 108.72% | 58.35% | 31.86% |
| 10.2° | 106.93% | 55.28% | 28.24% |
| Amplitude–Phase Error | System Throughput Improvement | |
|---|---|---|
| Without error | 108.72% | 106.93% |
| 108.54% | 106.87% | |
| 106.84% | 102.18% | |
| Beamwidth | System Throughput Improvement | ||
|---|---|---|---|
| Without Error | |||
| 3.2° | 108.72% | 57.81% | 31.93% |
| 10.2° | 106.93% | 53.74% | 27.86% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Liu, Z.; Xu, Y.; Du, Y.; Lyu, B.; Liao, L.; Zhang, G. Research on Collision Access Method for Satellite Internet of Things Based on Bayliss Window Function. Sensors 2025, 25, 3112. https://doi.org/10.3390/s25103112
Zhao X, Liu Z, Xu Y, Du Y, Lyu B, Liao L, Zhang G. Research on Collision Access Method for Satellite Internet of Things Based on Bayliss Window Function. Sensors. 2025; 25(10):3112. https://doi.org/10.3390/s25103112
Chicago/Turabian StyleZhao, Xinjie, Ziwei Liu, Yuanyuan Xu, Yihan Du, Bin Lyu, Leiyao Liao, and Gengxin Zhang. 2025. "Research on Collision Access Method for Satellite Internet of Things Based on Bayliss Window Function" Sensors 25, no. 10: 3112. https://doi.org/10.3390/s25103112
APA StyleZhao, X., Liu, Z., Xu, Y., Du, Y., Lyu, B., Liao, L., & Zhang, G. (2025). Research on Collision Access Method for Satellite Internet of Things Based on Bayliss Window Function. Sensors, 25(10), 3112. https://doi.org/10.3390/s25103112