
Fast and Fault-Tolerant Passive Hyperbolic Localization Using Sensor Consensus


Abstract
1. Introduction
- A new, fast evaluation method is introduced.
- The main contribution is the theoretical proof that ensures that the proposed algorithm always finds the global maximum of the consensus function over a finite grid.
- Finally, a comprehensive performance analysis is provided using simulations and real measurements.
2. Related Work
2.1. The TDOA Localization Problem
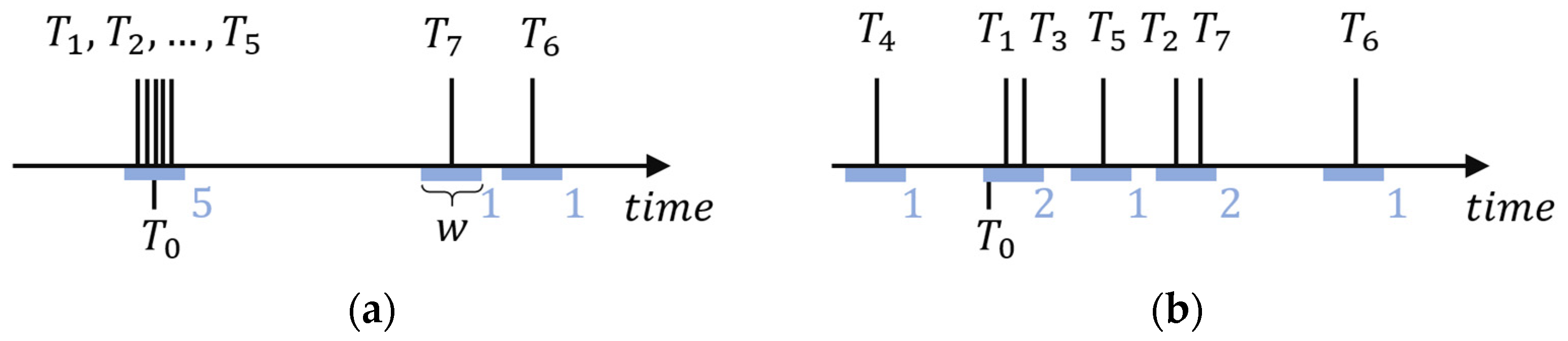
2.2. Consensus-Function-Based Localization
2.3. Calculation of the Consensus-Function-Based Location Estimate
3. Fast Consensus-Based Localization
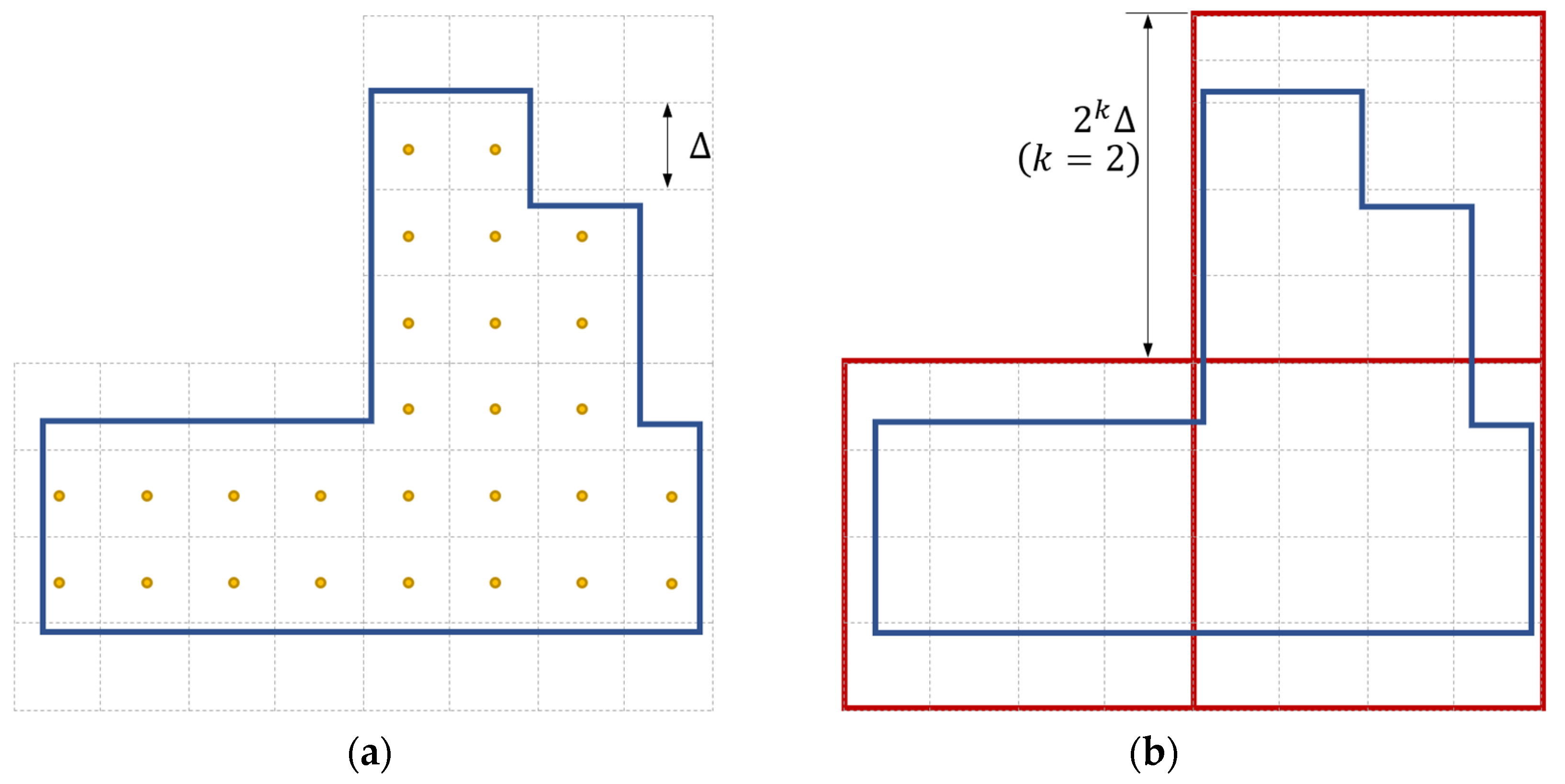
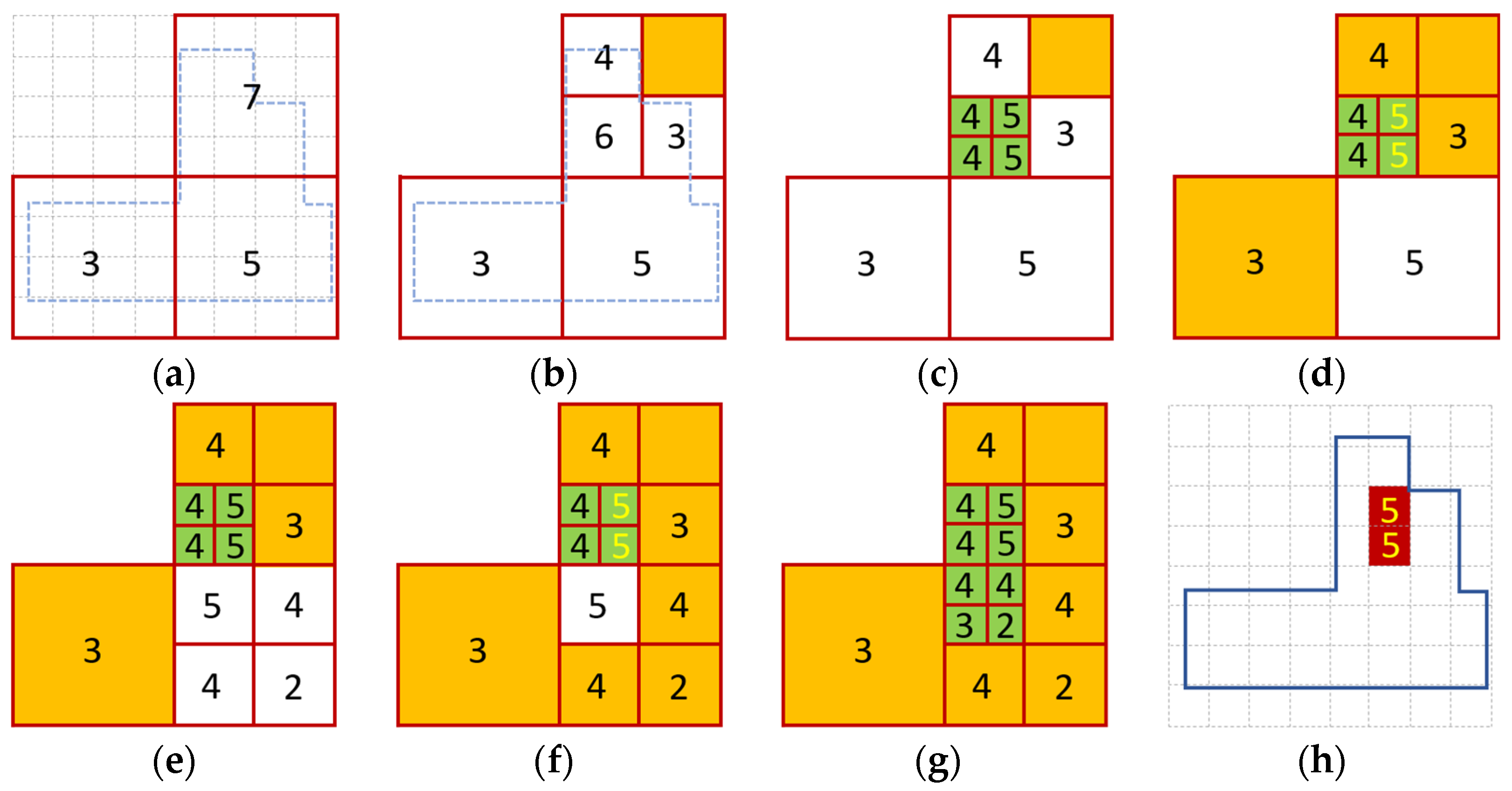
3.1. Fast Search on a Finite Grid
| Algorithm 1 Branch and Bound algorithm to find the maximum of the consensus function |
Input:
Branch:
|
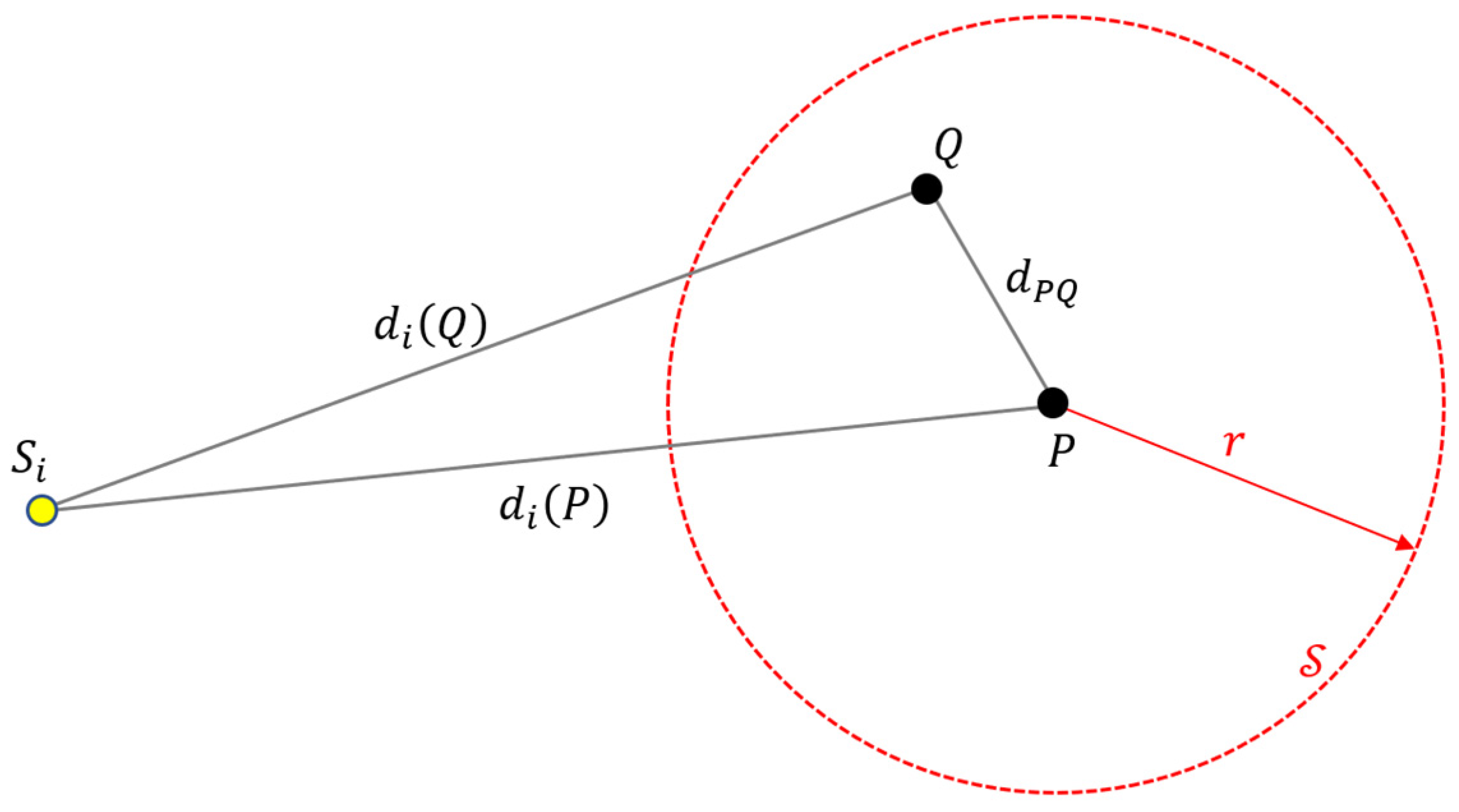
3.2. Upper Bound of the Consensus Function
3.3. Global Convergence
4. Performance Evaluation
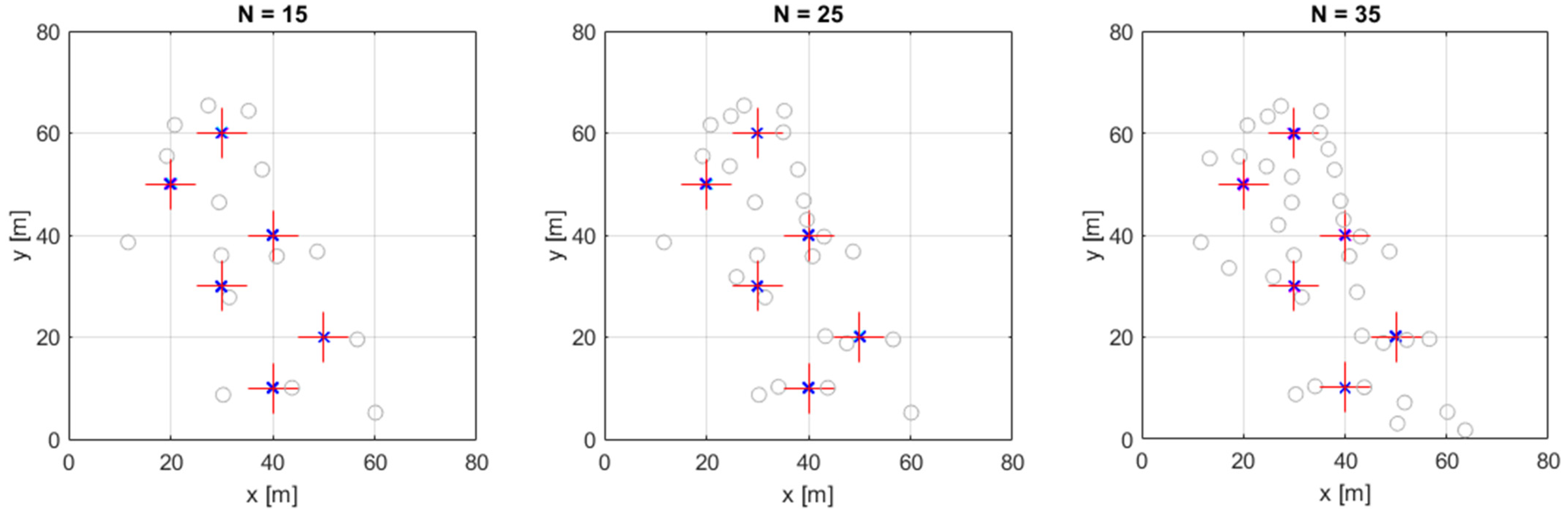
4.1. Simulations
- For each target position, we calculated the exact distances between the target position and the sensors.
- We calculated the exact times of arrivals as .
- We added measurement noise with normal distribution to and added additional measurement noise with normal distribution to to emulate the faulty (outlier) sensors. The number of outliers was For each target position, 100 independent measurements were created.
- Using measurements and the sensor positions , the estimated target positions were calculated by LS, COM-W, and CF.
- The tests were conducted using Matlab version R2021b on a computer with i5-8265 CPU with clock frequency of 1.6 GHz, and 24 GB of RAM.
- The LS algorithm was started from a random position within 1 m of the true position.
- The CF method was implemented in Matlab according to Algorithm 1. Apart from Matlab’s built-in vector operations, no acceleration methods (e.g., multithreading) were used.
- The final resolution of the CF method was .
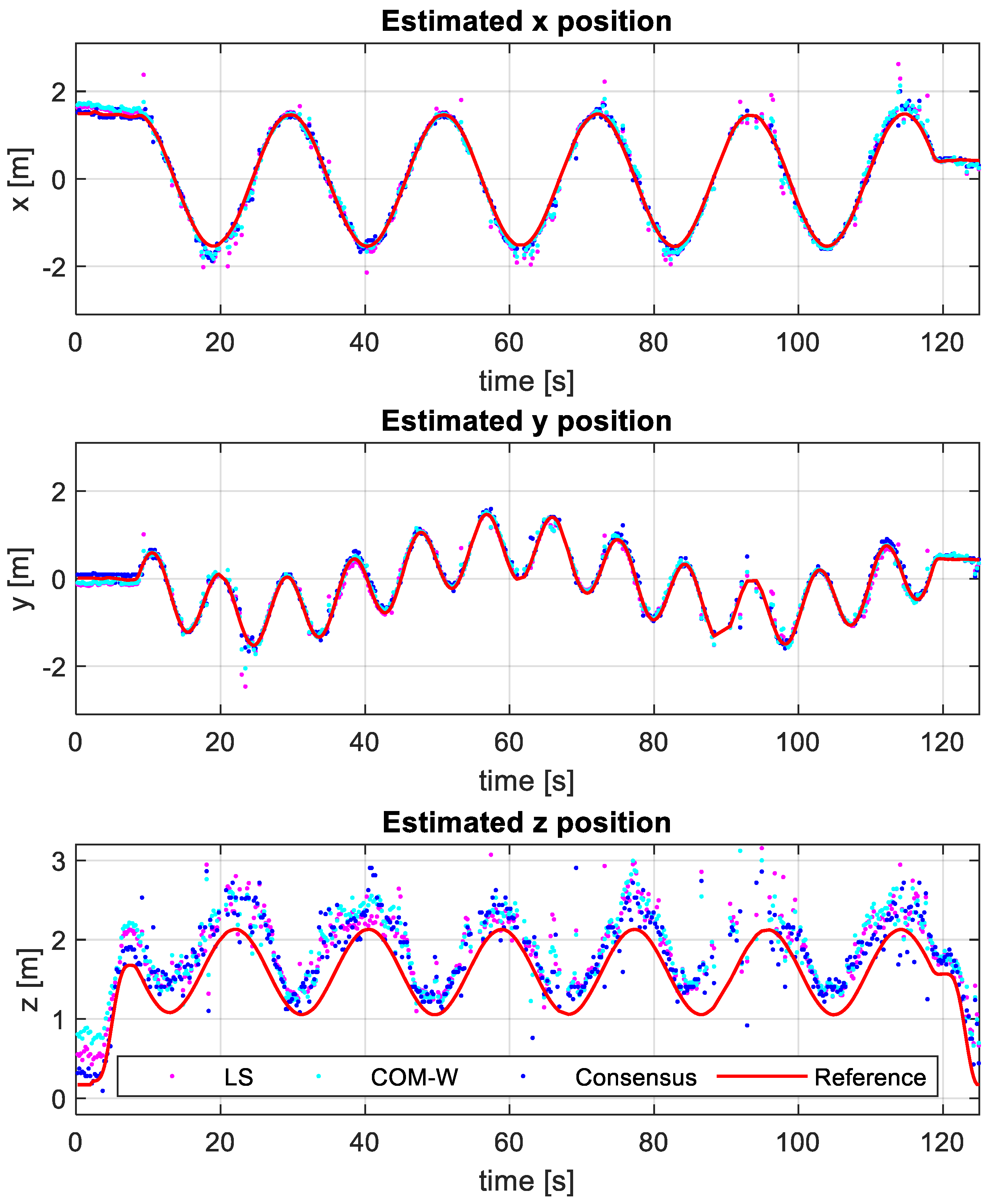
4.2. Measurements
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Symbols
| Notations | Definition |
| propagation speed | |
| dimension of the search space | |
| coarse grid | |
| fine grid | |
| source position | |
| emission time | |
| window length | |
| location estimate | |
| maximum sensor location error | |
| maximum time measurement error | |
| window function | |
| set of points where the consensus function takes its maximum |
References
- Lechner, W.; Baumann, S. Global navigation satellite systems. Comput. Electron. Agric. 2000, 25, 67–85. [Google Scholar] [CrossRef]
- Indelman, V.; Gurfil, P.; Rivlin, E.; Rotstein, H. Real-time vision-aided localization and navigation based on three-view geometry. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2239–2259. [Google Scholar] [CrossRef]
- Placed, J.A.; Strader, J.; Carrillo, H.; Atanasov, N.; Indelman, V.; Carlone, L.; Castellanos, J.A. A survey on active simultaneous localization and mapping: State of the art and new frontiers. IEEE Trans. Robot. 2023, 39, 1686–1705. [Google Scholar] [CrossRef]
- Guan, W.; Chen, S.; Wen, S.; Tan, Z.; Song, H.; Hou, W. High-Accuracy Robot Indoor Localization Scheme Based on Robot Operating System Using Visible Light Positioning. IEEE Photonics J. 2020, 12, 7901716. [Google Scholar] [CrossRef]
- Lin, H.; Zhan, J. GNSS-denied UAV indoor navigation with UWB incorporated visual inertial odometry. Measurement 2023, 206, 112256. [Google Scholar] [CrossRef]
- Zhou, Z.; Feng, W.; Li, P.; Liu, Z.; Xu, X.; Yao, Y. A fusion method of pedestrian dead reckoning and pseudo indoor plan based on conditional random field. Measurement 2023, 207, 112417. [Google Scholar] [CrossRef]
- Gao, S.; Liu, J.; Zong, Y.; Wang, M.; Jin, X.; Tian, G.; Dai, X. Blast source TDOA localization with time synchronization estimation based on spatial overpressure-monitoring network. Measurement 2022, 204, 112080. [Google Scholar] [CrossRef]
- Sun, S.; Zhao, C.; Zheng, C.; Zhao, C.; Wang, Y. High-Precision Underwater Acoustical Localization of the Black Box Based on an Improved TDOA Algorithm. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1317–1321. [Google Scholar] [CrossRef]
- Mercuri, M.; Sacco, G.; Hornung, R.; Zhang, P.; Visser, H.J.; Hijdra, M.; Liu, Y.H.; Pisa, S.; van Liempd, B.; Torfs, T. 2-D localization, angular separation and vital signs monitoring using a SISO FMCW radar for smart long-term health monitoring environments. IEEE Internet Things J. 2021, 8, 11065–11077. [Google Scholar] [CrossRef]
- Bibbò, L.; Carotenuto, R.; Della Corte, F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors 2022, 22, 8119. [Google Scholar] [CrossRef]
- Maroti, M.; Simon, G.; Ledeczi, A.; Sztipanovits, J. Shooter localization in urban terrain. Computer 2004, 37, 60–61. [Google Scholar] [CrossRef]
- Abiri, A.; Parsayan, A. The Bullet Shockwave-Based Real-Time Sniper Sound Source Localization. IEEE Sens. J. 2020, 20, 7253–7264. [Google Scholar] [CrossRef]
- Kundu, T. Acoustic source localization. Ultrasonics 2014, 54, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Bai, L.; Yang, Y.; Chen, M.; Feng, C.; Guo, C.; Saad, W.; Cui, S. Computer Vision-Based Localization with Visible Light Communications. IEEE Trans. Wirel. Commun. 2022, 21, 2051–2065. [Google Scholar] [CrossRef]
- Wolf, J.; Burgard, W.; Burkhardt, H. Robust vision-based localization by combining an image-retrieval system with Monte Carlo localization. IEEE Trans. Robot. 2005, 21, 208–216. [Google Scholar] [CrossRef]
- Simon, G.; Zachár, G.; Vakulya, G. Lookup: Robust and Accurate Indoor Localization Using Visible Light Communication. IEEE Trans. Instrum. Meas. 2017, 66, 2337–2348. [Google Scholar] [CrossRef]
- Widdison, E.; Long, D.G. A Review of Linear Multilateration Techniques and Applications. IEEE Access 2024, 12, 26251–26266. [Google Scholar] [CrossRef]
- Ho, K.C.; Chan, Y.T. Solution and performance analysis of geolocation by TDOA. IEEE Trans. Aerosp. Electron. Syst. 1992, 29, 1311–1322. [Google Scholar] [CrossRef]
- Li, J.; Lv, S.; Jin, Y.; Wang, C.; Liu, Y.; Liao, S. Geolocation and Tracking by TDOA Measurements Based on Space–Air–Ground Integrated Network. Remote Sens. 2023, 15, 44. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. TDOA positioning irrespective of source range. IEEE Trans. Signal Process. 2017, 65, 1447–1460. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, F.; Wan, Q. Wireless Sensor Network-Based Localization Method Using TDOA Measurements in MPR. IEEE Sens. J. 2019, 19, 3741–3750. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. TDOA-based indoor positioning using visible light. Photon Netw. Commun. 2014, 27, 80–88. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Z.; Zhou, Z.; Fu, J.; Qiu, H. Analysis of the Applicability of Dilution of Precision in the Base Station Configuration Optimization of Ultrawideband Indoor TDOA Positioning System. IEEE Access 2020, 8, 225076–225087. [Google Scholar] [CrossRef]
- Zhao, K.; Zhao, T.; Zheng, Z.; Yu, C.; Ma, D.; Rabie, K.; Kharel, R. Optimization of Time Synchronization and Algorithms with TDOA Based Indoor Positioning Technique for Internet of Things. Sensors 2020, 20, 6513. [Google Scholar] [CrossRef]
- Wang, G.; Zhu, W.; Ansari, N. Robust TDOA-Based Localization for IoT via Joint Source Position and NLOS Error Estimation. IEEE Internet Things J. 2019, 6, 8529–8541. [Google Scholar] [CrossRef]
- Swindlehurst, A.L.; Stoica, P. Maximum likelihood methods in radar array signal processing. Proc. IEEE 1998, 86, 421–441. [Google Scholar] [CrossRef]
- Smith, J.; Abel, J. Closed-form least-squares source location estimation from range-difference measurements. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1661–1669. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Mahajan, A.; Walworth, M. 3D position sensing using the differences in the time-of-flights from a wave source to various receivers. IEEE Trans. Robot. Autom. 2001, 17, 91–94. [Google Scholar] [CrossRef]
- Gillette, M.D.; Silverman, H.F. A Linear Closed-Form Algorithm for Source Localization from Time-Differences of Arrival. IEEE Signal Process. Lett. 2008, 15, 1–4. [Google Scholar] [CrossRef]
- Liu, N.; Xu, Z.; Sadler, B.M. Low-Complexity Hyperbolic Source Localization with a Linear Sensor Array. IEEE Signal Process. Lett. 2008, 15, 865–868. [Google Scholar] [CrossRef]
- Cao, S.; Chen, X.; Zhang, X.; Chen, X. Combined Weighted Method for TDOA-Based Localization. IEEE Trans. Instrum. Meas. 2020, 69, 1962–1971. [Google Scholar] [CrossRef]
- Foy, W.H. Position-Location Solutions by Taylor-Series Estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, AES-12, 187–194. [Google Scholar] [CrossRef]
- Zhou, Z.; Rui, Y.; Cai, X.; Lu, J. Constrained total least squares method using TDOA measurements for jointly estimating acoustic emission source and wave velocity. Measurement 2021, 182, 109758. [Google Scholar] [CrossRef]
- Mikhalev, A.; Ormondroyd, R.F. Comparison of Hough Transform and Particle Filter Methods of Emitter Geolocation using Fusion of TDOA Data. In Proceedings of the 2007 4th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 22 March 2007; pp. 121–127. [Google Scholar] [CrossRef]
- Mikhalev, A.; Hughes, E.J.; Ormondroyd, R.F. Comparison of Hough Transform and particle filter methods of passive emitter geolocation using fusion of TDOA and AOA data. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Simon, G.; Leitold, F. Passive TDOA Emitter Localization Using Fast Hyperbolic Hough Transform. Appl. Sci. 2023, 13, 13301. [Google Scholar] [CrossRef]
- Simon, G.; Maróti, M.; Lédeczi, A.; Balogh, G.; Kusy, B.; Nádas, A.; Pap, G.; Sallai, J.; Frampton, K. Sensor network-based countersniper system. In Proceedings of the SenSys ‘04 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 1–12. [Google Scholar] [CrossRef]
- Lédeczi, Á.; Nádas, A.; Völgyesi, P.; Balogh, G.; Kusy, B.; Sallai, J.; Pap, G.; Dóra, S.; Molnár, K.; Maróti, M.; et al. Countersniper system for urban warfare. ACM Trans. Sens. Netw. 2005, 1, 153–177. [Google Scholar] [CrossRef]
- Simon, G.; Vakulya, G. Fast Calculation Method for Time Difference of Arrival-based Localization. In Proceedings of the 2023 13th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nuremberg, Germany, 25–28 September 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Compagnoni, M.; Pini, A.; Canclini, A.; Bestagini, P.; Antonacci, F.; Tubaro, S.; Sarti, A. A Geometrical–Statistical Approach to Outlier Removal for TDOA Measurements. IEEE Trans. Signal Process. 2017, 65, 3960–3975. [Google Scholar] [CrossRef]
- Apolinário, J.A.; Yazdanpanah, H.; Nascimento, A.S.; de Campos, M.L.R. A Data-selective LS Solution to TDOA-based Source Localization. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4400–4404. [Google Scholar] [CrossRef]
- Khalaf-Allah, M. Particle Filtering for Three-Dimensional TDoA-Based Positioning Using Four Anchor Nodes. Sensors 2020, 20, 4516. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H. TDOA Localization With Unknown Signal Propagation Speed and Sensor Position Errors. IEEE Commun. Lett. 2020, 24, 1024–1027. [Google Scholar] [CrossRef]
- Sadeghi, M.; Behnia, F.; Amiri, R. Optimal Geometry Analysis for TDOA-Based Localization Under Communication Constraints. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3096–3106. [Google Scholar] [CrossRef]
- Wang, W.; Wang, G.; Ho, K.C.; Huang, L. Robust TDOA localization based on maximum correntropy criterion with variable center. Signal Process. 2023, 205, 108860. [Google Scholar] [CrossRef]
- Wang, W.; Wang, G.; Zhang, F.; Li, Y. Second-order cone relaxation for TDOA-based localization under mixed LOS/NLOS conditions. IEEE Signal Process. Lett. 2016, 23, 1872–1876. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. Semidefinite programming for NLOS error mitigation in TDOA localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Ma, X.; Ballal, T.; Chen, H.; Aldayel, O.; Al-Naffouri, T.Y. A Maximum-Likelihood TDOA Localization Algorithm Using Difference-of-Convex Programming. IEEE Signal Process. Lett. 2021, 28, 309–313. [Google Scholar] [CrossRef]
- Xiong, W.; Schindelhauer, C.; So, H.C.; Bordoy, J.; Gabbrielli, A.; Liang, J. TDOA-based localization with NLOS mitigation via robust model transformation and neurodynamic optimization. Signal Process. 2021, 178, 107774. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.; Hua, L.; Yang, X.; Cao, X.; Zhang, P.; Cao, Y.; Qi, L.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Vakulya, G.; Simon, G. Fast Adaptive Acoustic Localization for Sensor Networks. IEEE Trans. Instrum. Meas. 2011, 60, 1820–1829. [Google Scholar] [CrossRef]
- Zhao, W.; Goudar, A.; Qiao, X.; Schoellig, A.P. UTIL: An ultra-wideband time-difference-of-arrival indoor localization dataset. arXiv 2022, arXiv:2203.14471. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | x (m) | y (m) | z2D (m) | z3D (m) |
|---|---|---|---|---|
| 1 | 20 | 50 | 0 | 1.5 |
| 2 | 30 | 30 | 0 | 3.1 |
| 3 | 40 | 10 | 0 | 0.5 |
| 4 | 30 | 60 | 0 | 0.2 |
| 5 | 40 | 40 | 0 | 1.1 |
| 6 | 50 | 20 | 0 | 0.1 |
| RMSE (m) | RMSE (m) | RMSE (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | LS | COMW | CF | LS | COMW | CF | LS | COMW | CF | |||
| 1 | 0.071 | 0.103 | 0.086 | 0.077 | 0.061 | 0.090 | 0.076 | 0.068 | 0.048 | 0.084 | 0.063 | 0.060 |
| 2 | 0.068 | 0.092 | 0.091 | 0.077 | 0.051 | 0.073 | 0.057 | 0.057 | 0.044 | 0.079 | 0.052 | 0.059 |
| 3 | 0.082 | 0.092 | 0.099 | 0.090 | 0.067 | 0.076 | 0.089 | 0.072 | 0.054 | 0.078 | 0.067 | 0.063 |
| 4 | 0.065 | 0.114 | 0.098 | 0.067 | 0.053 | 0.083 | 0.077 | 0.060 | 0.047 | 0.082 | 0.064 | 0.059 |
| 5 | 0.064 | 0.083 | 0.080 | 0.065 | 0.048 | 0.086 | 0.061 | 0.064 | 0.042 | 0.078 | 0.054 | 0.062 |
| 6 | 0.068 | 0.072 | 0.071 | 0.073 | 0.057 | 0.071 | 0.088 | 0.064 | 0.046 | 0.074 | 0.057 | 0.059 |
| mean | 0.070 | 0.092 | 0.088 | 0.075 | 0.056 | 0.080 | 0.075 | 0.064 | 0.047 | 0.079 | 0.060 | 0.060 |
| RMSE (m) | RMSE (m) | RMSE (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | LS | COMW | CF | LS | COMW | CF | LS | COMW | CF | |||
| 1 | 0.27 | 0.32 | 0.30 | 0.27 | 0.20 | 0.25 | 0.21 | 0.21 | 0.18 | 0.26 | 0.22 | 0.22 |
| 2 | 0.13 | 0.15 | 0.14 | 0.14 | 0.11 | 0.13 | 0.11 | 0.11 | 0.10 | 0.11 | 0.11 | 0.10 |
| 3 | 0.21 | 0.24 | 0.33 | 0.25 | 0.14 | 0.15 | 0.19 | 0.14 | 0.12 | 0.15 | 0.16 | 0.12 |
| 4 | 0.30 | 0.43 | 0.30 | 0.45 | 0.23 | 0.45 | 0.23 | 0.41 | 0.21 | 0.46 | 0.27 | 0.39 |
| 5 | 0.16 | 0.19 | 0.17 | 0.16 | 0.10 | 0.14 | 0.12 | 0.12 | 0.09 | 0.13 | 0.12 | 0.11 |
| 6 | 0.20 | 0.21 | 0.22 | 0.32 | 0.12 | 0.14 | 0.15 | 0.17 | 0.10 | 0.13 | 0.13 | 0.15 |
| mean | 0.21 | 0.26 | 0.24 | 0.27 | 0.15 | 0.21 | 0.17 | 0.19 | 0.13 | 0.21 | 0.17 | 0.18 |
| RMSE (m) | RMSE (m) | RMSE (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | LS | COMW | CF | LS | COMW | CF | LS | COMW | CF | |||
| 1 | 0.071 | 3.5 | 3.5 | 0.13 | 0.061 | 2.2 | 3.6 | 0.20 | 0.048 | 1.7 | 3.4 | 0.20 |
| 2 | 0.068 | 3.4 | 1.9 | 0.14 | 0.051 | 1.9 | 1.2 | 0.12 | 0.044 | 3.2 | 1.1 | 0.13 |
| 3 | 0.082 | 3.5 | 3.8 | 0.16 | 0.067 | 2.8 | 4.8 | 0.22 | 0.054 | 4.4 | 3.1 | 0.15 |
| 4 | 0.065 | 2.2 | 3.8 | 0.22 | 0.053 | 1.6 | 4.0 | 0.19 | 0.047 | 1.9 | 4.8 | 0.37 |
| 5 | 0.064 | 4.4 | 1.5 | 0.13 | 0.048 | 2.3 | 0.8 | 0.12 | 0.042 | 2.3 | 0.7 | 0.14 |
| 6 | 0.068 | 2.7 | 2.9 | 0.38 | 0.057 | 2.9 | 2.1 | 0.47 | 0.046 | 1.9 | 1.5 | 0.15 |
| mean | 0.070 | 3.3 | 2.9 | 0.19 | 0.056 | 2.3 | 2.8 | 0.22 | 0.046 | 2.6 | 2.4 | 0.19 |
| RMSE (m) | RMSE (m) | RMSE (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ID | LS | COMW | CF | LS | COMW | CF | LS | COMW | CF | |||
| 1 | 0.27 | 16 | 9.1 | 0.40 | 0.20 | 4.8 | 2.7 | 0.37 | 0.18 | 5.2 | 2.6 | 0.27 |
| 2 | 0.13 | 6.6 | 3.3 | 0.29 | 0.11 | 2.9 | 1.2 | 0.27 | 0.10 | 18.0 | 2.3 | 0.22 |
| 3 | 0.21 | 7.2 | 6.5 | 0.38 | 0.14 | 3.9 | 4.5 | 0.24 | 0.12 | 2.2 | 3.8 | 0.25 |
| 4 | 0.30 | 5.9 | 7.7 | 0.88 | 0.23 | 6.5 | 3.5 | 0.45 | 0.21 | 10.1 | 5.7 | 0.81 |
| 5 | 0.16 | 5.7 | 3.7 | 0.19 | 0.10 | 5.2 | 2.3 | 0.44 | 0.09 | 4.3 | 0.95 | 0.17 |
| 6 | 0.20 | 9.8 | 5.4 | 0.84 | 0.12 | 2.6 | 3.1 | 0.25 | 0.10 | 4.7 | 1.7 | 0.37 |
| mean | 0.21 | 8.5 | 6.0 | 0.50 | 0.15 | 4.3 | 2.9 | 0.34 | 0.13 | 7.4 | 2.8 | 0.35 |
| Mean Execution Time, 2D (ms) | Mean Execution Time, 3D (ms) | |||||
|---|---|---|---|---|---|---|
| LS | COM-W | CF | LS | COM-W | CF | |
| 15 | 3.9 | 34.8 | 18.8 | 5.0 | 95.6 | 89.0 |
| 25 | 3.7 | 164.8 | 19.8 | 4.7 | 814.7 | 85.8 |
| 35 | 3.6 | 439.5 | 20.8 | 4.7 | 3225.7 | 83.1 |
| mean | 3.7 | 213.1 | 19.8 | 4.8 | 1378.7 | 86.0 |
| RMSE-xy (m) | RMSE-xyz (m) | Execution Times (ms) | |
|---|---|---|---|
| LS | 0.24 | 0.62 | 4.2 |
| COM-W | 0.19 | 0.47 | 4.3 |
| CF | 0.15 | 0.41 | 11.1 |
| ID | x (m) | y (m) | z (m) |
|---|---|---|---|
| 1 | 36.34 | 67.55 | 3.55 |
| 2 | 30.30 | 66.42 | −0.30 |
| 3,4 | 31.94 | 57.34 | −0.30 |
| 5,6,7,8 | 28.93 | 45.45 | 7.30 |
| 9 | 25.85 | 40.44 | −0.20 |
| 10 | 33.37 | 48.24 | −0.25 |
| ID | Position Estimation Error (m) | Run-Time (ms) | N | Cw | ||||
|---|---|---|---|---|---|---|---|---|
| LS | COM-W | CF | LS | COM-W | CF | |||
| 1 | 14.22 | 10.04 | 0.80 | 105 | 1404 | 109 | 29 | 25 |
| 2 | 2.34 | 2.74 | 1.28 | 24 | 11 | 350 | 10 | 9 |
| 3 | 1.50 | 2.00 | 1.18 | 6 | 69 | 52 | 26 | 23 |
| 4 | 4.65 | 3.91 | 0.89 | 6 | 2261 | 92 | 34 | 25 |
| 5 | 12.41 | 8.79 | 0.34 | 8 | 2789 | 60 | 38 | 23 |
| 6 | 3.29 | 6.13 | 0.14 | 6 | 292 | 141 | 21 | 19 |
| 7 | 13.00 | 12.51 | 0.50 | 4 | 215 | 490 | 20 | 16 |
| 8 | 3.54 | 3.37 | 0.77 | 5 | 67 | 125 | 15 | 14 |
| 9 | 7.82 | 11.37 | 1.06 | 6 | 1159 | 34 | 30 | 21 |
| 10 | 4.82 | 5.32 | 1.94 | 6 | 1224 | 79 | 30 | 22 |
| average | 6.76 | 6.62 | 0.89 | 18 | 949 | 153 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simon, G.; Zachár, G. Fast and Fault-Tolerant Passive Hyperbolic Localization Using Sensor Consensus. Sensors 2024, 24, 2891. https://doi.org/10.3390/s24092891
Simon G, Zachár G. Fast and Fault-Tolerant Passive Hyperbolic Localization Using Sensor Consensus. Sensors. 2024; 24(9):2891. https://doi.org/10.3390/s24092891
Chicago/Turabian StyleSimon, Gyula, and Gergely Zachár. 2024. "Fast and Fault-Tolerant Passive Hyperbolic Localization Using Sensor Consensus" Sensors 24, no. 9: 2891. https://doi.org/10.3390/s24092891
APA StyleSimon, G., & Zachár, G. (2024). Fast and Fault-Tolerant Passive Hyperbolic Localization Using Sensor Consensus. Sensors, 24(9), 2891. https://doi.org/10.3390/s24092891