

Pulse Compression Shape-Based ADC/DAC Chain Synchronization Measurement Algorithm with Sub-Sampling Resolution


Abstract
1. Introduction
- We propose an algorithm that can directly obtain the delay parameters of the entire ADC/DAC chain without the need for any additional hardware expenses.
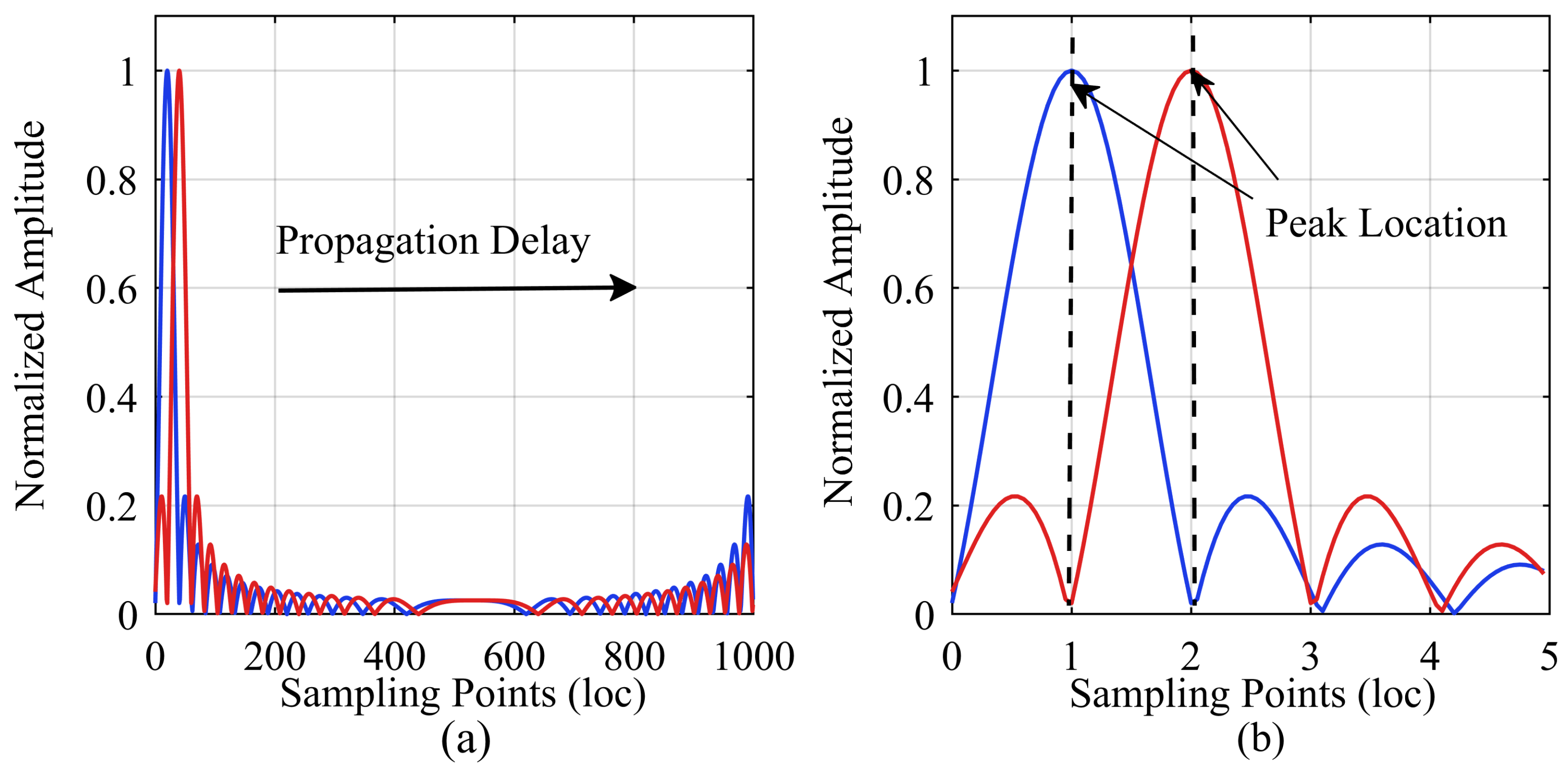
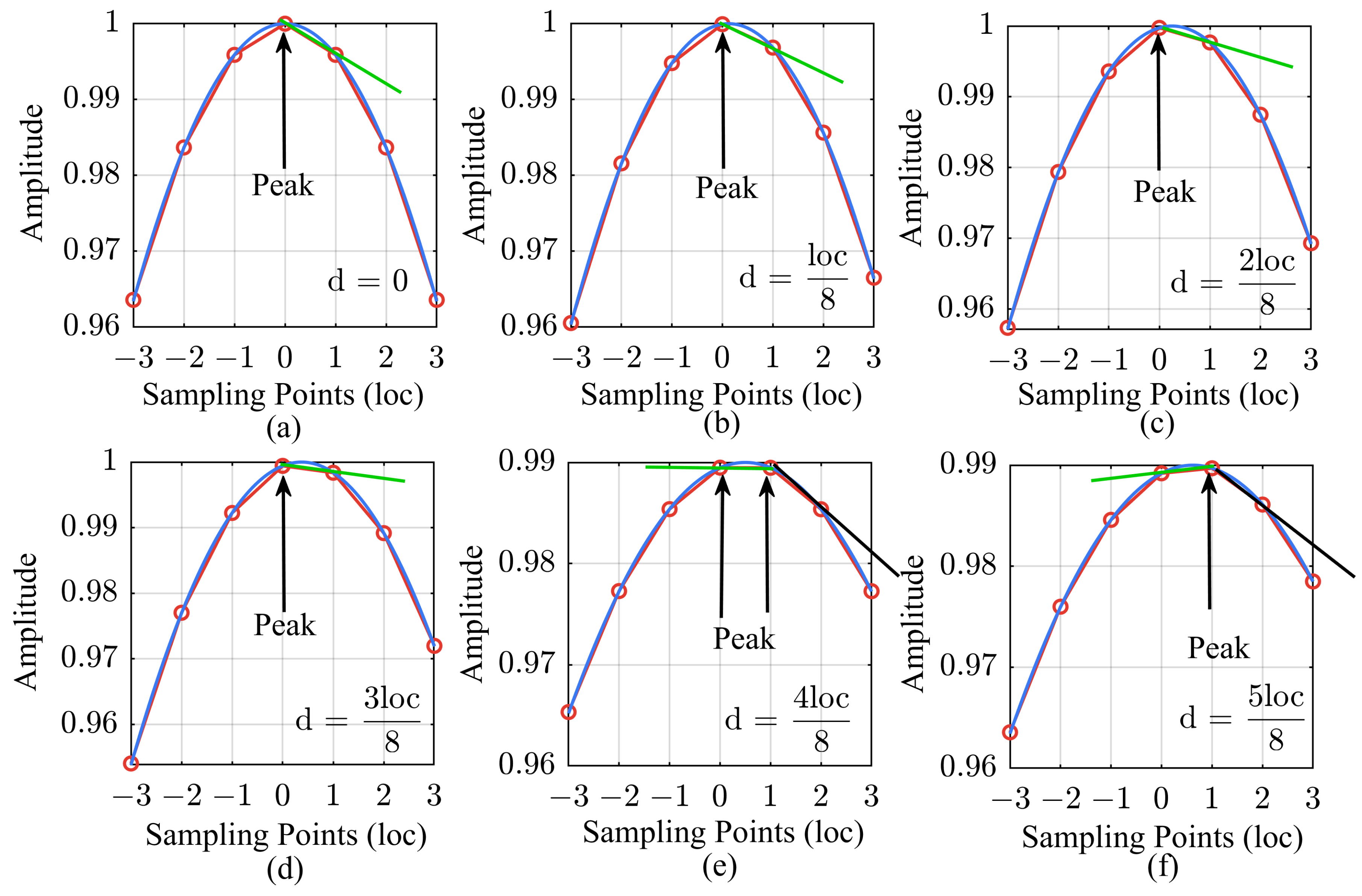
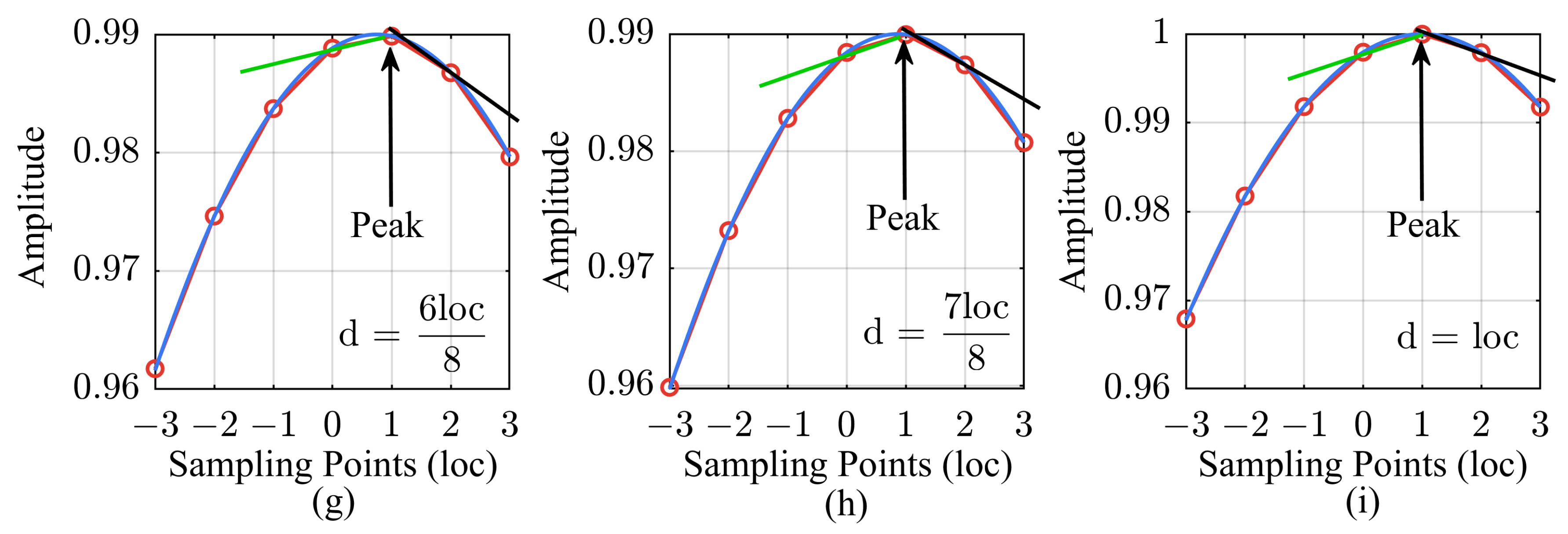
- We map the location of the pulse compression peak within the calculation window to the delay parameters and model the discretized peak shape to achieve sub-sampling resolution. This breakthrough enables us to overcome the limitation of sampling frequency on the accuracy of digital signal processing.
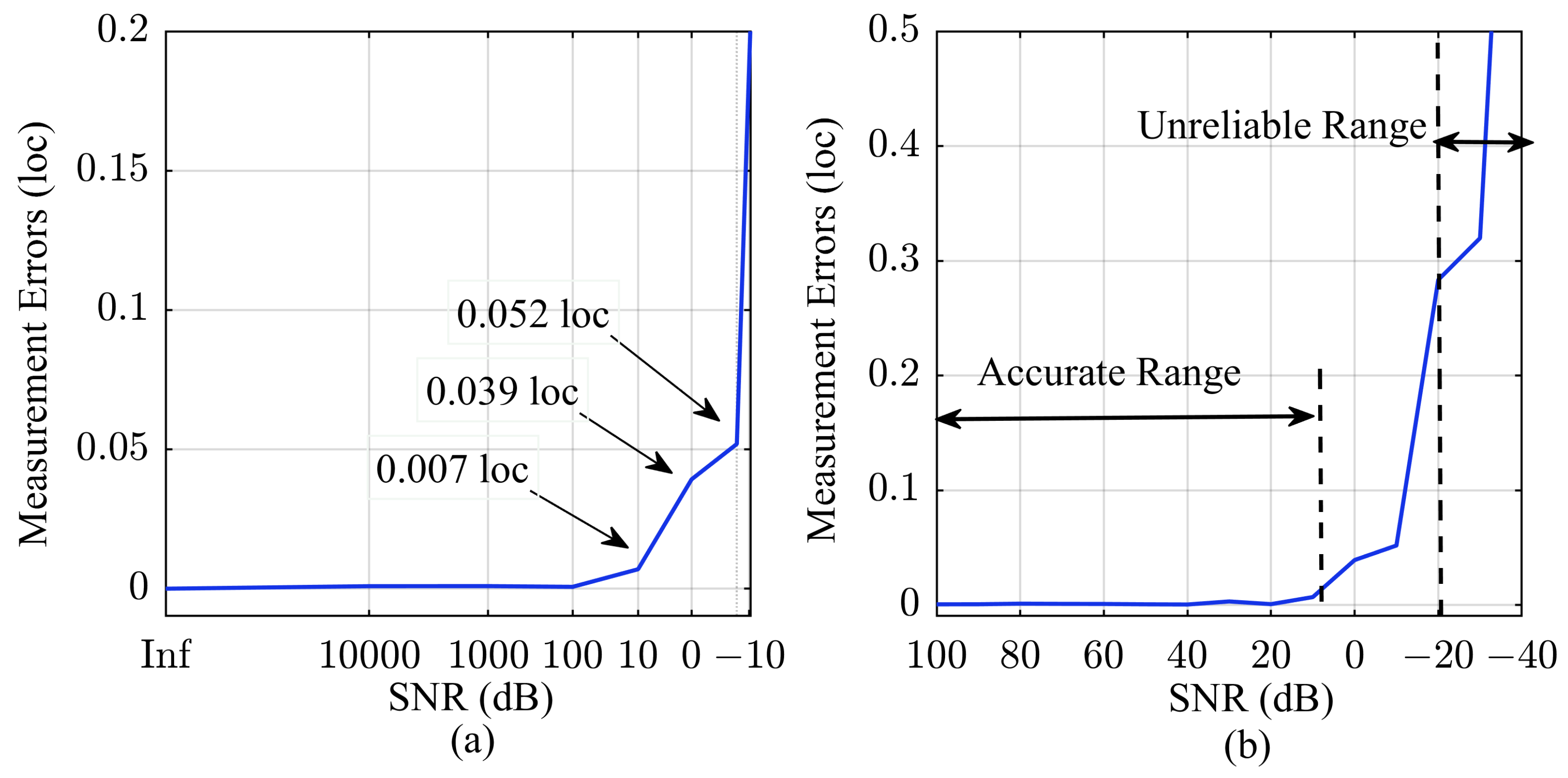
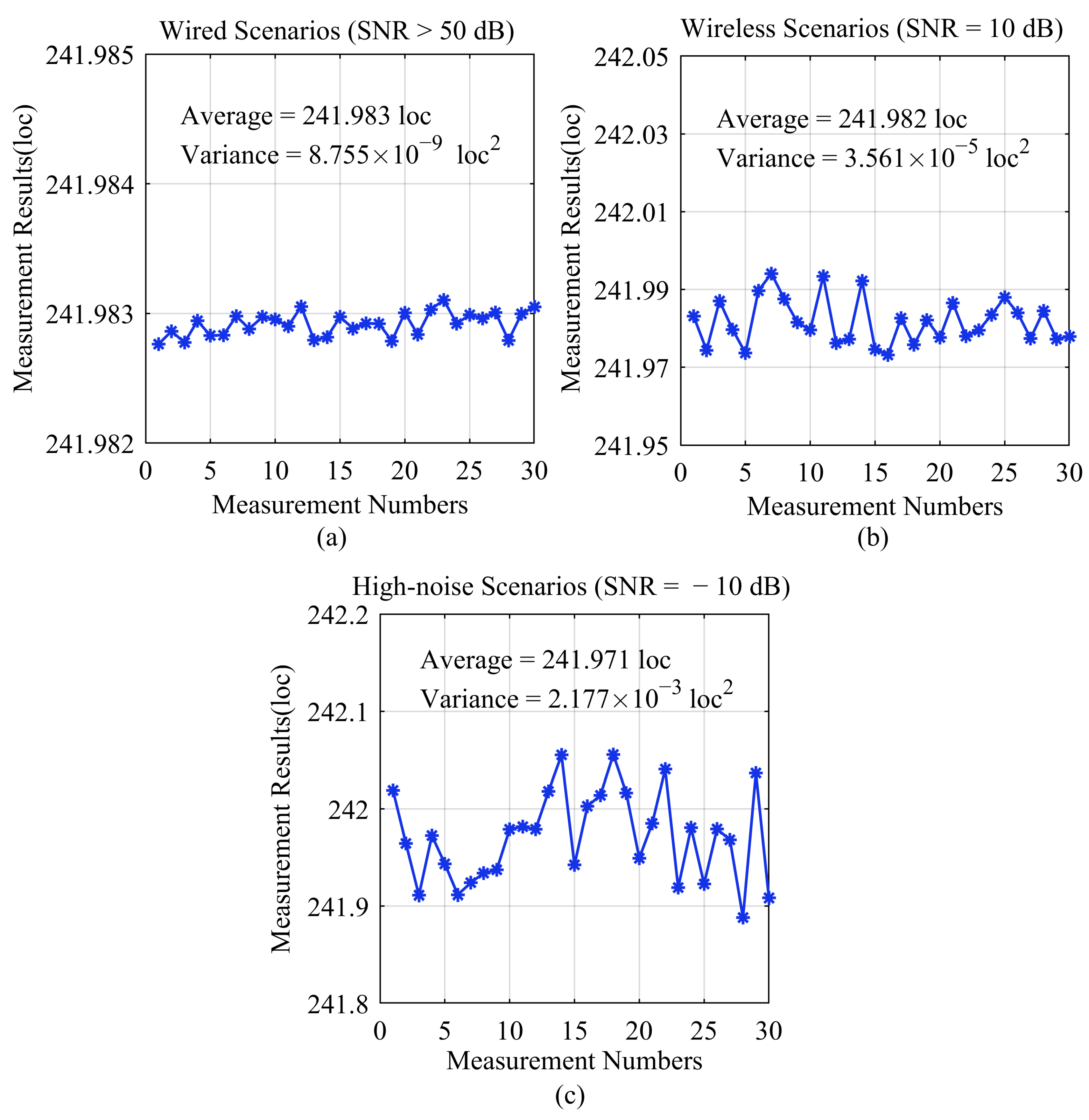
- The algorithm exhibits good noise performance. In typical wireless scenarios with an SNR greater than 10 dB, the results can be accurately measured up to 0.01 sampling points. Additionally, its resolution can still be maintained at 0.1 sampling points in high-noise scenarios with an SNR ranging between 10 dB and −10 dB.
- We conducted a validation of the algorithm’s effectiveness and precision by designing a multi-channel radio platform. The results indicate that it can accurately measure the delay values of the ADC/DAC chains, making it widely applicable for optimizing the synchronization performance in multi-channel systems.
2. Methods
2.1. Pulse Compression Theory
2.2. Algorithm Description
| Algorithm 1 Synchronization Delay Measurement. |
|
3. Error and Noise Performance Analysis
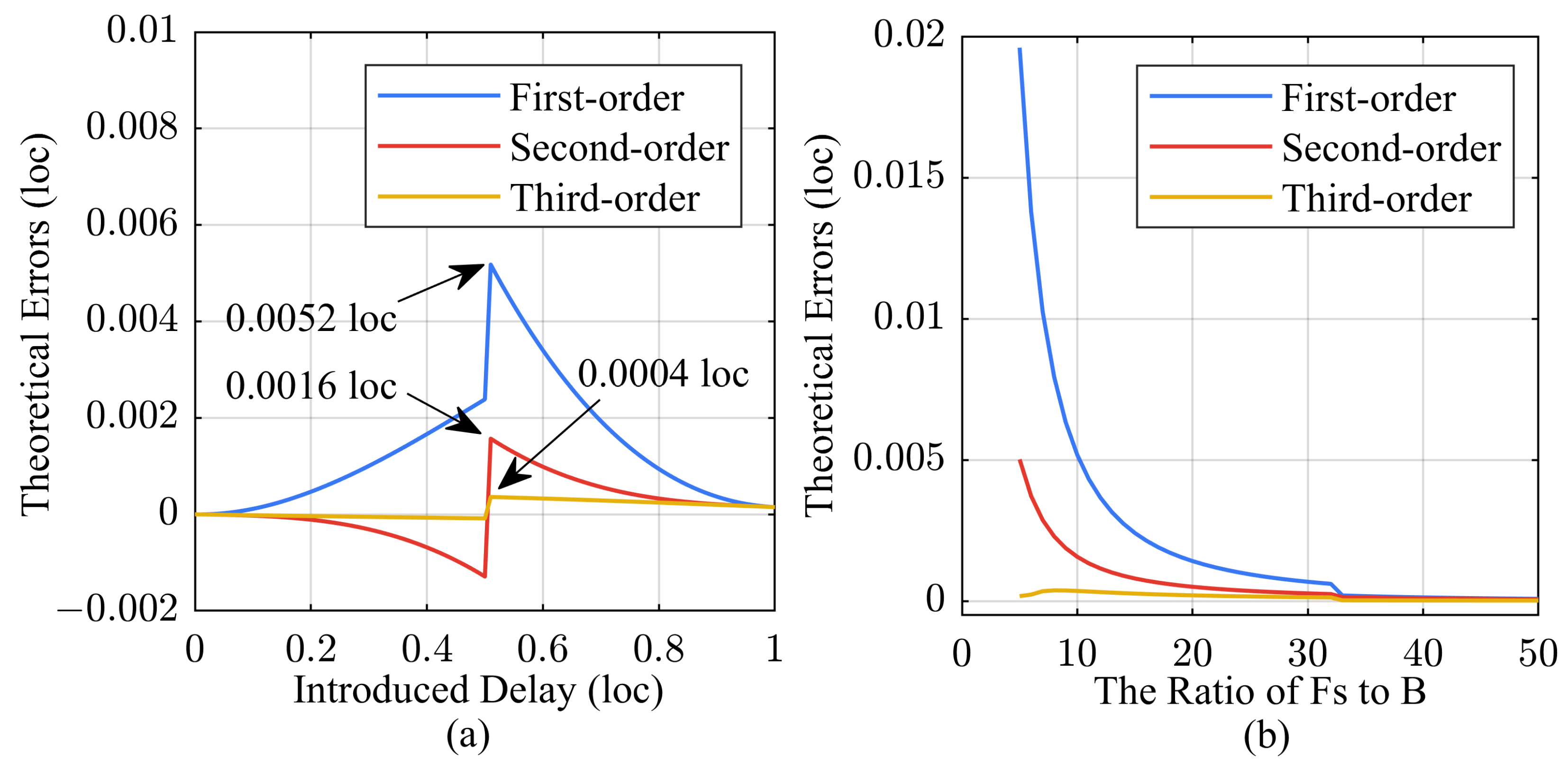
3.1. Error Analysis
3.2. Noise Performance
4. Results
4.1. Experiment Platform
4.2. Chain Delay Measurement
4.3. Precision Verification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Albreem, M.A.; Juntti, M.; Shahabuddin, S. Massive MIMO detection techniques: A survey. IEEE Commun. Surv. Tutor. 2019, 21, 3109–3132. [Google Scholar] [CrossRef]
- Beydoun, A.; Alaeddine, H.; elmokdad, H. New fast time synchronization method for MIMO-OFDM systems. In Proceedings of the 2018 11th IFIP Wireless and Mobile Networking Conference (WMNC), Prague, Czech Republic, 3–5 September 2018; pp. 1–6. [Google Scholar]
- Nanzer, J.A.; Mghabghab, S.R.; Ellison, S.M.; Schlegel, A. Distributed phased arrays: Challenges and recent advances. IEEE Trans. Microw. Theory Tech. 2021, 69, 4893–4907. [Google Scholar] [CrossRef]
- Ly, A.; Yao, Y.D. A review of deep learning in 5G research: Channel coding, massive MIMO, multiple access, resource allocation, and network security. IEEE Open J. Commun. Soc. 2021, 2, 396–408. [Google Scholar] [CrossRef]
- Song, Y.; Lu, W.; Sun, B.; Hong, Y.; Qu, F.; Han, J.; Zhang, W.; Xu, J. Experimental demonstration of MIMO-OFDM underwater wireless optical communication. Opt. Commun. 2017, 403, 205–210. [Google Scholar] [CrossRef]
- Black, W.C.; Hodges, D.A. Time interleaved converter arrays. IEEE J. Solid-State Circuits 1980, 15, 1022–1029. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, C.; Wang, X.; Chang, Y.; Liu, M. A Reconfigurable 8-to-10-bit 20-to-5-GS/s time-interleaved time-domain ADC. Microelectron. J. 2023, 138, 105836. [Google Scholar] [CrossRef]
- Im, J.; Zheng, K.; Chou, C.H.A.; Zhou, L.; Kim, J.W.; Chen, S.; Wang, Y.; Hung, H.W.; Tan, K.; Lin, W.; et al. A 112-Gb/s PAM-4 long-reach wireline transceiver using a 36-way time-interleaved SAR ADC and inverter-based RX analog front-end in 7-nm FinFET. IEEE J. Solid-State Circuits 2020, 56, 7–18. [Google Scholar] [CrossRef]
- Thomas, P.; Finkbeiner, J.; Grözing, M.; Berroth, M. Time-Interleaved Switched Emitter Followers to Extend Front-End Sampling Rates to up to 200 GS/s. IEEE J. Solid-State Circuits 2022, 57, 2599–2610. [Google Scholar] [CrossRef]
- Alizadeh Meghrazi, M.; Tian, Y.; Mahnam, A.; Bhattachan, P.; Eskandarian, L.; Taghizadeh Kakhki, S.; Popovic, M.R.; Lankarany, M. Multichannel ECG recording from waist using textile sensors. BioMed. Eng. Online 2020, 19, 48. [Google Scholar] [CrossRef]
- Lee, S.; Cho, H.; Kim, K.; Jun, S.C. Simultaneous EEG acquisition system for multiple users: Development and related issues. Sensors 2019, 19, 4592. [Google Scholar] [CrossRef]
- Yi, X.; Li, G.; Lin, L. Noninvasive hemoglobin measurement using dynamic spectrum. Rev. Sci. Instrum. 2017, 88, 083109. [Google Scholar] [CrossRef]
- Giri Prasad, R.; Venkatesan, P. Group based multi-channel synchronized spectrum sensing in cognitive radio network with 5G. Mob. Netw. Appl. 2019, 24, 327–339. [Google Scholar] [CrossRef]
- Du, S.; Hu, J.; Zhu, Y.; Hu, C. Analysis and compensation of synchronous measurement error for multi-channel laser interferometer. Meas. Sci. Technol. 2017, 28, 055201. [Google Scholar] [CrossRef]
- Ye, R.; Redfield, S.; Liu, H. High-precision indoor UWB localization: Technical challenges and method. In Proceedings of the 2010 IEEE International Conference on Ultra-Wideband, Nanjing, China, 20–23 September 2010; Volume 2, pp. 1–4. [Google Scholar]
- Liu, Q.; Wang, Y.; Fathy, A.E. Towards low cost, high speed data sampling module for multifunctional real-time UWB radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1301–1316. [Google Scholar] [CrossRef]
- Schroeer, G. A real-time UWB multi-channel indoor positioning system for industrial scenarios. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–5. [Google Scholar]
- Xiao, J.; Song, J.; Liang, Y. A 102.1-dB SNDR oversampling merge-mismatch-error-shaping SAR ADC in 180 nm CMOS. Microelectron. J. 2024, 143, 106053. [Google Scholar] [CrossRef]
- Dong, L.; Song, Y.; Zhang, B.; Lan, Z.; Xin, Y.; Liu, L.; Li, K.; Wang, X.; Geng, L. Theoretical total harmonic distortion evaluation based on digital to analogue converter mismatch to improve the linearity of successive approximation register analogue to digital converter. IET Circuits Devices Syst. 2022, 16, 189–199. [Google Scholar] [CrossRef]
- Cao, Z.; Chuang, C.H.; King, J.K.; Lin, C.T. Multi-channel EEG recordings during a sustained-attention driving task. Sci. Data 2019, 6, 19. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; McDonald, B.E.; Farrell, T.R.; Huang, X.; Clancy, E.A. Comparison between Two Time Synchronization and Data Alignment Methods for Multi-Channel Wearable Biosensor Systems Using BLE Protocol. Sensors 2023, 23, 2465. [Google Scholar] [CrossRef]
- Dian, F.J. Low-power synchronized multi-channel data acquisition communication system. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019; pp. 1027–1031. [Google Scholar]
- Xiaohui, Z.; Songqing, T.; Rui, L. Research and design of high precision synchronization data acquisition system. Nucl. Tech. 2014, 37, 3–7. [Google Scholar]
- Pflugradt, M.; Mann, S.; Tigges, T.; Goernig, M.; Orglmeister, R. Multi-modal signal acquisition using a synchronized wireless body sensor network in geriatric patients. Biomed. Eng. Tech. 2016, 61, 57–68. [Google Scholar] [CrossRef]
- Puce, A.; Hämäläinen, M.S. A review of issues related to data acquisition and analysis in EEG/MEG studies. Brain Sci. 2017, 7, 58. [Google Scholar] [CrossRef]
- Stackler, M.; Bouin, E.; Laube, R.; Ligozat, J. A novel method to synchronize high-speed data converters. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar]
- Su, Z.; Huschle, J.; Redfield, S.; Qiao, T.; Liu, H.; Liu, F. High-speed real-time multi-channel data-acquisition unit: Challenges and results. In Proceedings of the 2014 IEEE 11th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2014; pp. 105–112. [Google Scholar]
- Pan, Z.; Ye, P.; Yang, K.; Huang, W.; Zhao, Y. Frequency response mismatch calibration in generalized time-interleaved systems. IEEE Trans. Instrum. Meas. 2022, 71, 1–17. [Google Scholar] [CrossRef]
- Li, J.; Pan, J.; Zhang, Y. Automatic calibration method of channel mismatches for wideband TI-ADC system. Electronics 2019, 8, 56. [Google Scholar] [CrossRef]
- Monsurrò, P.; Rosato, F.; Trifiletti, A. New models for the calibration of four-channel time-interleaved ADCs using filter banks. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 141–145. [Google Scholar] [CrossRef]
- Huang, W.; Wang, H.; Ye, P.; Yang, K.; Jiang, J.; Pan, H. Novel sifting-based solution for multiple-converter synchronization of ultra-fast TIADC systems. IEICE Electron. Express 2015, 12, 20150585. [Google Scholar] [CrossRef]
- Diniz, G. JESD204B vs. serial LVDS interface considerations for wideband data converter applications. Analog Devices Tech. Art. 2013, MS-2442, 1–4. [Google Scholar]
- Guan, Y.; Wang, Y.; Ji, S. The Design of Digital Sub-array Synchronization for Phased Array Radar. In Proceedings of the 2020 9th Asia-Pacific Conference on Antennas and Propagation (APCAP), Xiamen, China, 4–7 August 2020; pp. 1–2. [Google Scholar]
- Yin, P.; Shu, Z.; Xia, Y.; Shen, T.; Guan, X.; Wang, X.; Mohammad, U.; Zang, J.; Fu, D.; Zeng, X.; et al. A low-area and low-power comma detection and word alignment circuits for JESD204B/C controller. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2925–2935. [Google Scholar] [CrossRef]
- Xie, M.; Liu, S.; Zhai, D.; Yuan, J. Application of Synchronous Acquisition Technology Based on JESD204B Protocol in Phased Array Radar. In Proceedings of the 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018; pp. 1–5. [Google Scholar]
- Naldi, G.; Comoretto, G.; Pastore, S.; Alderighi, M.; Bortolotti, C.; Gravina, A.; Monari, J.; Roma, M.; Schiaffino, M. Cabinet clock distribution network for low-frequency aperture array. J. Astron. Telesc. Instrum. Syst. 2022, 8, 011015. [Google Scholar] [CrossRef]
- Jatin, J.; Fouziya, C.; Pakharia, D.; Ch, V. A Configurable, Multi-Channel, Direct Wideband RF Sampling SWaP-C Optimized Transceiver and Processing Module for EW Systems. In Proceedings of the 2023 International Conference on Control, Communication and Computing (ICCC), Thiruvananthapuram, India, 19–21 May 2023; pp. 1–5. [Google Scholar]
- Seguna, C.; Gatt, E.; Grech, I.; Casha, O.; De Cataldo, G. Development of an New ASIC based, Multi-channel Data Acquisition and Real-Time Processing System. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; Volume 1, pp. 779–782. [Google Scholar]
- Gomez, R. Theoretical comparison of direct-sampling versus heterodyne RF receivers. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 1276–1282. [Google Scholar] [CrossRef]
- Ji, S.; Kang, J.; Guan, Y. The synchronization design of multi-channel digital TR module for phased array radar. In Proceedings of the 2020 IEEE MTT-S International Wireless Symposium (IWS), Shanghai, China, 20–23 September 2020; pp. 1–3. [Google Scholar]
- Said, H.; El-Kouny, A.; El-Henawey, A. Real Time Design and Realization of Digital Radar Pulse Compression Based on Linear Frequency Modulation (LFM) without Components around Zero Frequency Using FPGA. In Proceedings of the 2013 International Conference on Advanced ICT and Education (ICAICTE-13), Hainan, China, 22–22 September 2013; pp. 809–813. [Google Scholar]
- Skolnik, M.I. Introduction to Radar Systems; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]
- Turin, G. An introduction to matched filters. IRE Trans. Inf. Theory 1960, 6, 311–329. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Detailed Explanation | Value |
|---|---|---|
| DAC sampling frequency | 1200 MHz | |
| Carrier frequency | 300 MHz | |
| ADC sampling frequency | 1200 MHz | |
| Digital down conversion frequency | 300 MHz | |
| ADC decimation factor | 2 | |
| B | LFM signal bandwidth | 100 MHz |
| T | LFM signal duration | 10 μs |
| Connector | Cable Length (m) | Delay (ns) | Propagation Speed () |
|---|---|---|---|
| SMA KJ | 1.00 | 4.79 | 2.09 |
| SMA KJ | 1.50 | 7.18 | 2.09 |
| SMA KJ | 2.00 | 9.57 | 2.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, X.; Fang, H.; Luo, W.; Zhang, B. Pulse Compression Shape-Based ADC/DAC Chain Synchronization Measurement Algorithm with Sub-Sampling Resolution. Sensors 2024, 24, 2831. https://doi.org/10.3390/s24092831
Hao X, Fang H, Luo W, Zhang B. Pulse Compression Shape-Based ADC/DAC Chain Synchronization Measurement Algorithm with Sub-Sampling Resolution. Sensors. 2024; 24(9):2831. https://doi.org/10.3390/s24092831
Chicago/Turabian StyleHao, Xiangyu, Hongji Fang, Wei Luo, and Bo Zhang. 2024. "Pulse Compression Shape-Based ADC/DAC Chain Synchronization Measurement Algorithm with Sub-Sampling Resolution" Sensors 24, no. 9: 2831. https://doi.org/10.3390/s24092831
APA StyleHao, X., Fang, H., Luo, W., & Zhang, B. (2024). Pulse Compression Shape-Based ADC/DAC Chain Synchronization Measurement Algorithm with Sub-Sampling Resolution. Sensors, 24(9), 2831. https://doi.org/10.3390/s24092831