
Low-Cost Recognition of Plastic Waste Using Deep Learning and a Multi-Spectral Near-Infrared Sensor


Abstract
1. Introduction
2. Related Work
3. Methods
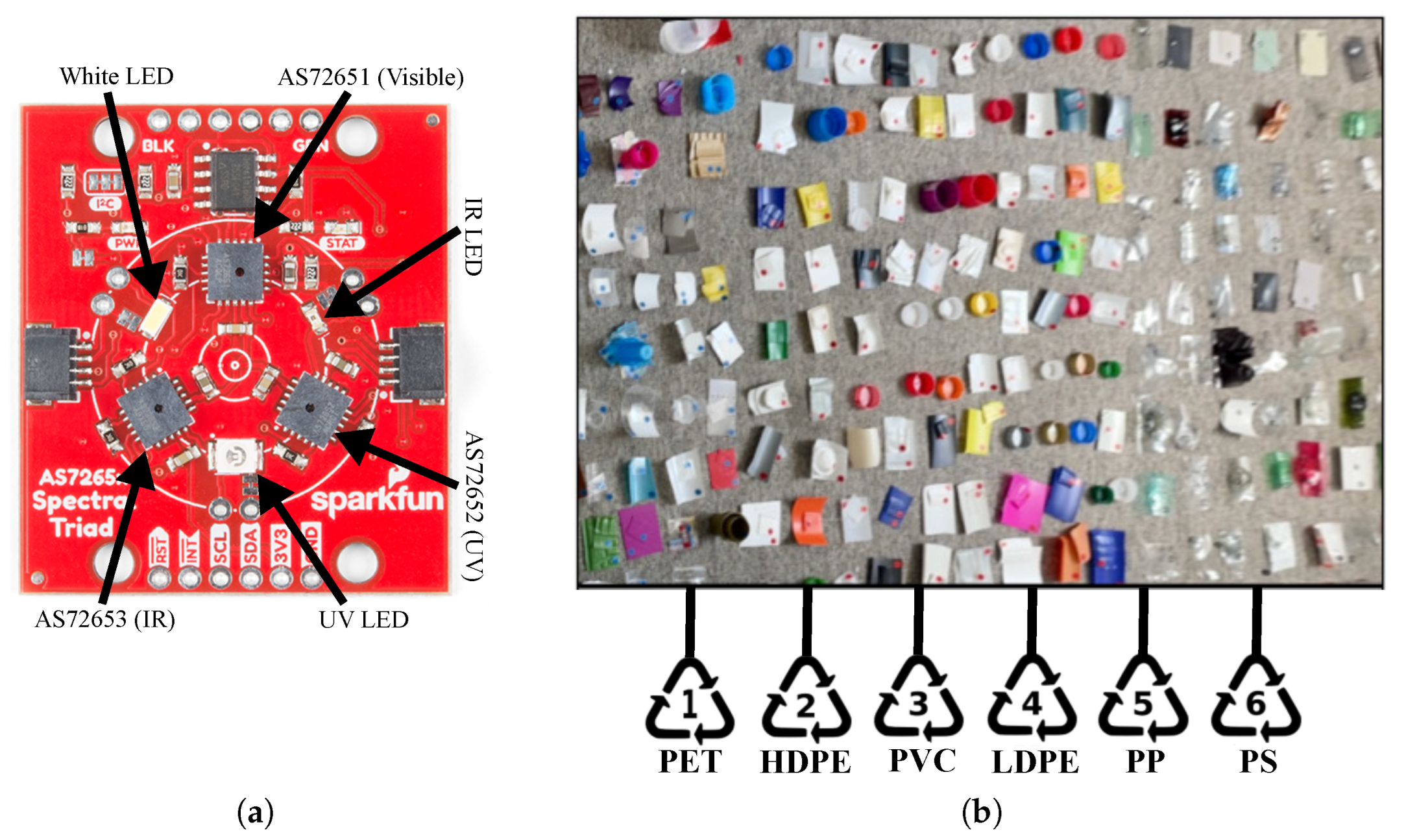
3.1. Multi-Spectral Sensor
3.2. Plastics Used for Data Collection
3.3. Experimental Setup for Data Collection
3.4. Data Collection
3.5. Machine Learning Methods for Recognition
3.5.1. Data Processing
3.5.2. Machine Learning Pipeline
3.5.3. Performance Metrics
3.5.4. Optimisation Process
4. Experiments and Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barnes, S.J. Understanding plastics pollution: The role of economic development and technological research. Environ. Pollut. 2019, 249, 812–821. [Google Scholar] [CrossRef] [PubMed]
- Williams, A.T.; Rangel-Buitrago, N. The past, present, and future of plastic pollution. Mar. Pollut. Bull. 2022, 176, 113429. [Google Scholar] [CrossRef] [PubMed]
- Bruno, E.A. Automated Sorting of Plastics for Recycling; North Carolina Department of Environment and Natural Resources: Raleigh, NC, USA, 2000.
- Orset, C.; Barret, N.; Lemaire, A. How consumers of plastic water bottles are responding to environmental policies? Waste Manag. 2017, 61, 13–27. [Google Scholar] [CrossRef] [PubMed]
- Blettler, M.C.; Abrial, E.; Khan, F.R.; Sivri, N.; Espinola, L.A. Freshwater plastic pollution: Recognizing research biases and identifying knowledge gaps. Water Res. 2018, 143, 416–424. [Google Scholar] [CrossRef]
- Lau, W.W.; Shiran, Y.; Bailey, R.M.; Cook, E.; Stuchtey, M.R.; Koskella, J.; Velis, C.A.; Godfrey, L.; Boucher, J.; Murphy, M.B.; et al. Evaluating scenarios toward zero plastic pollution. Science 2020, 369, 1455–1461. [Google Scholar] [CrossRef] [PubMed]
- Dawson, L. ‘Our Waste, our Resources; A Strategy for England’—Switching to a circular economy through the use of extended producer responsibility. Environ. Law Rev. 2019, 21, 210–218. [Google Scholar] [CrossRef]
- Dahlbo, H.; Poliakova, V.; Mylläri, V.; Sahimaa, O.; Anderson, R. Recycling potential of post-consumer plastic packaging waste in Finland. Waste Manag. 2018, 71, 52–61. [Google Scholar] [CrossRef] [PubMed]
- ASTM D7611-20; Change to Resin Identification Code Standard. American National Standards Institute: Washington, DC, USA, 2020. Available online: https://blog.ansi.org/2020/03/astm-d7611-20-resin-identification-code-ric/#gref (accessed on 20 July 2023).
- Lahtela, V.; Hyvärinen, M.; Kärki, T. Composition of plastic fractions in waste streams: Toward more efficient recycling and utilization. Polymers 2019, 11, 69. [Google Scholar] [CrossRef] [PubMed]
- Duan, Q.; Li, J. Classification of common household plastic wastes combining multiple methods based on near-infrared spectroscopy. ACS ES&T Eng. 2021, 1, 1065–1073. [Google Scholar] [CrossRef]
- Michel, A.P.; Morrison, A.E.; Preston, V.L.; Marx, C.T.; Colson, B.C.; White, H.K. Rapid identification of marine plastic debris via spectroscopic techniques and machine learning classifiers. Environ. Sci. Technol. 2020, 54, 10630–10637. [Google Scholar] [CrossRef]
- Rani, M.; Marchesi, C.; Federici, S.; Rovelli, G.; Alessandri, I.; Vassalini, I.; Ducoli, S.; Borgese, L.; Zacco, A.; Bilo, F.; et al. Miniaturized near-infrared (MicroNIR) spectrometer in plastic waste sorting. Materials 2019, 12, 2740. [Google Scholar] [CrossRef]
- West, G.; Assaf, T.; Martinez-Hernandez, U. Towards Low-cost Plastic Recognition using Machine Learning and Multi-spectra Near-infrared Sensor. In Proceedings of the 2023 IEEE SENSORS, Vienna, Austria, 29 October–1 November 2023; pp. 1–4. [Google Scholar]
- Vidal, M.; Gowen, A.; Amigo, J.M. NIR hyperspectral imaging for plastics classification. NIR News 2012, 23, 13–15. [Google Scholar] [CrossRef]
- Fang, Z.; Hu, W.; Wang, R.; Chen, S. Application of hyperspectral CT technology combined with machine learning in recognition of plastic components. NDT Int. 2019, 102, 287–294. [Google Scholar] [CrossRef]
- Henriksen, M.L.; Karlsen, C.B.; Klarskov, P.; Hinge, M. Plastic classification via in-line hyperspectral camera analysis and unsupervised machine learning. Vib. Spectrosc. 2022, 118, 103329. [Google Scholar] [CrossRef]
- Cunanan, C.F. PET-Bottle-Recognizer: A Machine Vision Recognition of Polyethylene-Terephthalate Based-Bottle for Plastic Waste Classification and Recycling. In Proceedings of the 2020 IEEE 7th International Conference on Engineering Technologies and Applied Sciences (ICETAS), Kuala Lumpur, Malaysia, 18–20 December 2020; pp. 1–5. [Google Scholar]
- Lu, W.; Chen, J. Computer vision for solid waste sorting: A critical review of academic research. Waste Manag. 2022, 142, 29–43. [Google Scholar] [CrossRef] [PubMed]
- Maharjan, N.; Miyazaki, H.; Pati, B.M.; Dailey, M.N.; Shrestha, S.; Nakamura, T. Detection of river plastic using UAV sensor data and deep learning. Remote Sens. 2022, 14, 3049. [Google Scholar] [CrossRef]
- Cucuzza, P.; Serranti, S.; Capobianco, G.; Bonifazi, G. Multi-level color classification of post-consumer plastic packaging flakes by hyperspectral imaging for optimizing the recycling process. Spectrochim. Acta Part Mol. Biomol. Spectrosc. 2023, 302, 123157. [Google Scholar] [CrossRef]
- Armitage, S.; Awty-Carroll, K.; Clewley, D.; Martinez-Vicente, V. Detection and Classification of Floating Plastic Litter Using a Vessel-Mounted Video Camera and Deep Learning. Remote Sens. 2022, 14, 3425. [Google Scholar] [CrossRef]
- Wang, Z.; Peng, B.; Huang, Y.; Sun, G. Classification for plastic bottles recycling based on image recognition. Waste Manag. 2019, 88, 170–181. [Google Scholar] [CrossRef]
- He, X.; He, Z.; Zhang, S.; Zhao, X. A novel vision-based PET bottle recycling facility. Meas. Sci. Technol. 2016, 28, 025601. [Google Scholar] [CrossRef]
- Özkan, K.; Ergin, S.; Işık, Ş.; Işıklı, İ. A new classification scheme of plastic wastes based upon recycling labels. Waste Manag. 2015, 35, 29–35. [Google Scholar] [CrossRef] [PubMed]
- Bobulski, J.; Kubanek, M. Deep learning for plastic waste classification system. Appl. Comput. Intell. Soft Comput. 2021, 2021, 6626948. [Google Scholar] [CrossRef]
- Lopez-Ruiz, N.; Granados-Ortega, F.; Carvajal, M.A.; Martinez-Olmos, A. Portable multispectral imaging system based on Raspberry Pi. Sens. Rev. 2017, 37, 322–329. [Google Scholar] [CrossRef]
- Hipolito, J.C.; Alon, A.S.; Amorado, R.V.; Fernando, M.G.Z.; De Chavez, P.I.C. Detection of Underwater Marine Plastic Debris Using an Augmented Low Sample Size Dataset for Machine Vision System: A Deep Transfer Learning Approach. In Proceedings of the 2021 IEEE 19th Student Conference on Research and Development (SCOReD), Kota Kinabalu, Malaysia, 23–25 November 2021; pp. 82–86. [Google Scholar]
- Aishwarya, A.; Wadhwa, P.; Owais, O.; Vashisht, V. A waste management technique to detect and separate non-biodegradable waste using machine learning and YOLO algorithm. In Proceedings of the 2021 11th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 28–29 January 2021; pp. 443–447. [Google Scholar]
- Yang, G.; Jin, J.; Lei, Q.; Wang, Y.; Zhou, J.; Sun, Z.; Li, X.; Wang, W. Garbage classification system with yolov5 based on image recognition. In Proceedings of the 2021 IEEE 6th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 22–24 October 2021; pp. 11–18. [Google Scholar]
- Serranti, S.; Cucuzza, P.; Bonifazi, G. Hyperspectral imaging for VIS-SWIR classification of post-consumer plastic packaging products by polymer and color. In Proceedings of the SPIE Future Sensing Technologies, Online, 9–13 November 2020; Volume 11525, pp. 212–217. [Google Scholar]
- Zhang, Q.; Yang, Q.; Zhang, X.; Wei, W.; Bao, Q.; Su, J.; Liu, X. A multi-label waste detection model based on transfer learning. Resour. Conserv. Recycl. 2022, 181, 106235. [Google Scholar] [CrossRef]
- Yang, M.; Thung, G. Classification of trash for recyclability status. CS229 Proj. Rep. 2016, 2016, 3. [Google Scholar]
- Zhang, Q.; Yang, Q.; Zhang, X.; Bao, Q.; Su, J.; Liu, X. Waste image classification based on transfer learning and convolutional neural network. Waste Manag. 2021, 135, 150–157. [Google Scholar] [CrossRef] [PubMed]
- Qin, J.; Wang, C.; Ran, X.; Yang, S.; Chen, B. A robust framework combined saliency detection and image recognition for garbage classification. Waste Manag. 2022, 140, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Bonifazi, G.; Fiore, L.; Gasbarrone, R.; Hennebert, P.; Serranti, S. Detection of brominated plastics from e-waste by short-wave infrared spectroscopy. Recycling 2021, 6, 54. [Google Scholar] [CrossRef]
- Komarskiy, A.; Korzhenevskiy, S.; Komarov, N. Detection of plastic articles behind metal layers of variable thickness on dual-energy X-ray images using artificial neural networks. In Proceedings of the 8th International Conference on X-ray, Electrovacuum and Biomedical Technique, Saint Petersburg, Russia, 25–26 November 2021; Volume 2726. [Google Scholar]
- Mao, W.L.; Chen, W.C.; Wang, C.T.; Lin, Y.H. Recycling waste classification using optimized convolutional neural network. Resour. Conserv. Recycl. 2021, 164, 105132. [Google Scholar] [CrossRef]
- Ricketts, P.; Voutchkov, M.; Gordon, A. Characterization of inorganic elements in common consumer plastics using handheld X-ray fluorescence analyzer. Environ. Sci. Pollut. Res. 2022, 29, 55666–55674. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, X.; Chen, L.; Yang, Z.; Fang, Z. Plastic classification with X-ray absorption spectroscopy based on back propagation neural network. Appl. Spectrosc. 2017, 71, 2538–2548. [Google Scholar] [CrossRef] [PubMed]
- Sparkfun Triad Spectroscopy Sensor—AS7265x (Qwiic). Available online: https://www.sparkfun.com/products/15050 (accessed on 18 July 2023).
- Gholamiangonabadi, D.; Kiselov, N.; Grolinger, K. Deep neural networks for human activity recognition with wearable sensors: Leave-one-subject-out cross-validation for model selection. IEEE Access 2020, 8, 133982–133994. [Google Scholar] [CrossRef]
- Wong, T.T. Performance evaluation of classification algorithms by k-fold and leave-one-out cross validation. Pattern Recognit. 2015, 48, 2839–2846. [Google Scholar] [CrossRef]
- Archana, H.T.; Sachin, D. Dimensionality reduction and classification through PCA and LDA. Int. J. Comput. Appl. 2015, 122, 4–8. [Google Scholar]
- Behera, B.; Kumaravelan, G.; Kumar, P. Performance evaluation of deep learning algorithms in biomedical document classification. In Proceedings of the 2019 11th international conference on advanced computing (ICoAC), Chennai, India, 18–20 December 2019; pp. 220–224. [Google Scholar]
- Male, J.; Martinez-Hernandez, U. Deep learning based robot cognitive architecture for collaborative assembly tasks. Robot.-Comput.-Integr. Manuf. 2023, 83, 102572. [Google Scholar] [CrossRef]
- Mohamed, S.A.; Martinez-Hernandez, U. A light-weight artificial neural network for recognition of activities of daily living. Sensors 2023, 23, 5854. [Google Scholar] [CrossRef]
- Sun, Y.; Ding, S.; Zhang, Z.; Jia, W. An improved grid search algorithm to optimize SVR for prediction. Soft Comput. 2021, 25, 5633–5644. [Google Scholar] [CrossRef]
- Syarif, I.; Prugel-Bennett, A.; Wills, G. SVM parameter optimization using grid search and genetic algorithm to improve classification performance. Telkomnika (Telecommun. Comput. Electron. Control) 2016, 14, 1502–1509. [Google Scholar] [CrossRef]
- Masoumi, H.; Safavi, S.M.; Khani, Z. Identification and classification of plastic resins using near infrared reflectance. Int. J. Mech. Ind. Eng. 2012, 6, 213–220. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Best Classifier | Dimensionality Reduction | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|---|
| CNN | PCA | 72.50% | 72.43% | 72.50% | 72.38% |
| CNN | Raw data | 72.17% | 72.08% | 72.17% | 72.03% |
| MLP | PCA | 70.25% | 70.24% | 70.25% | 70.18% |
| MLP | Raw data | 70.08% | 70.03% | 70.08% | 70.00% |
| Authors | Sensor | Plastic Types | Number of Samples | Accuracy | Method | Sensor Cost |
|---|---|---|---|---|---|---|
| [11] | Ocean Optics–NIR512 | HDPE, LDPE, PC, PS, PET, PVC | 184 (Waste) | 95.7% | PCA–SVM | >GBP 25,000 |
| [13] | VIAVI—MicroNIR | PE, PP, PVC, PET, PS | 250 (Waste) | 99% | PLS–DA | >GBP 8500 |
| [12] | Ocean Optics—Flame NIR | PET, HDPE, PVC, LDPE, PP & PS | 180 (Waste) | 91% | LDA | ∼GBP 6000 |
| [36] | ASD Field Spec 4 | ABS, PS | 26 (Waste) | 80.56% | PLS–DA | ∼GBP 52,000 |
| This work | Triad Spectroscopy Sensor module | PET, HDPE, PVC, LDPE, PP & PS | 423 (Waste) | 72.5% | PCA–CNN | ∼GBP 56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Hernandez, U.; West, G.; Assaf, T. Low-Cost Recognition of Plastic Waste Using Deep Learning and a Multi-Spectral Near-Infrared Sensor. Sensors 2024, 24, 2821. https://doi.org/10.3390/s24092821
Martinez-Hernandez U, West G, Assaf T. Low-Cost Recognition of Plastic Waste Using Deep Learning and a Multi-Spectral Near-Infrared Sensor. Sensors. 2024; 24(9):2821. https://doi.org/10.3390/s24092821
Chicago/Turabian StyleMartinez-Hernandez, Uriel, Gregory West, and Tareq Assaf. 2024. "Low-Cost Recognition of Plastic Waste Using Deep Learning and a Multi-Spectral Near-Infrared Sensor" Sensors 24, no. 9: 2821. https://doi.org/10.3390/s24092821
APA StyleMartinez-Hernandez, U., West, G., & Assaf, T. (2024). Low-Cost Recognition of Plastic Waste Using Deep Learning and a Multi-Spectral Near-Infrared Sensor. Sensors, 24(9), 2821. https://doi.org/10.3390/s24092821