
A New Lunar Lineament Extraction Method Based on Improved UNet++ and YOLOv5
Abstract
1. Introduction
- A new Lunar lineaments dataset, which is one of the few datasets of its kind, is created. This dataset contains lineament structures based on Charge-Coupled Device (CCD) data from the Lunar Reconnaissance Orbiter Camera (LROC). With a total of 1000 manually collected Lunar lineaments samples, this dataset provides a unique and valuable resource for lunar research. The scarcity of such datasets is due to the complexity and time-consuming nature of the data collection and processing.
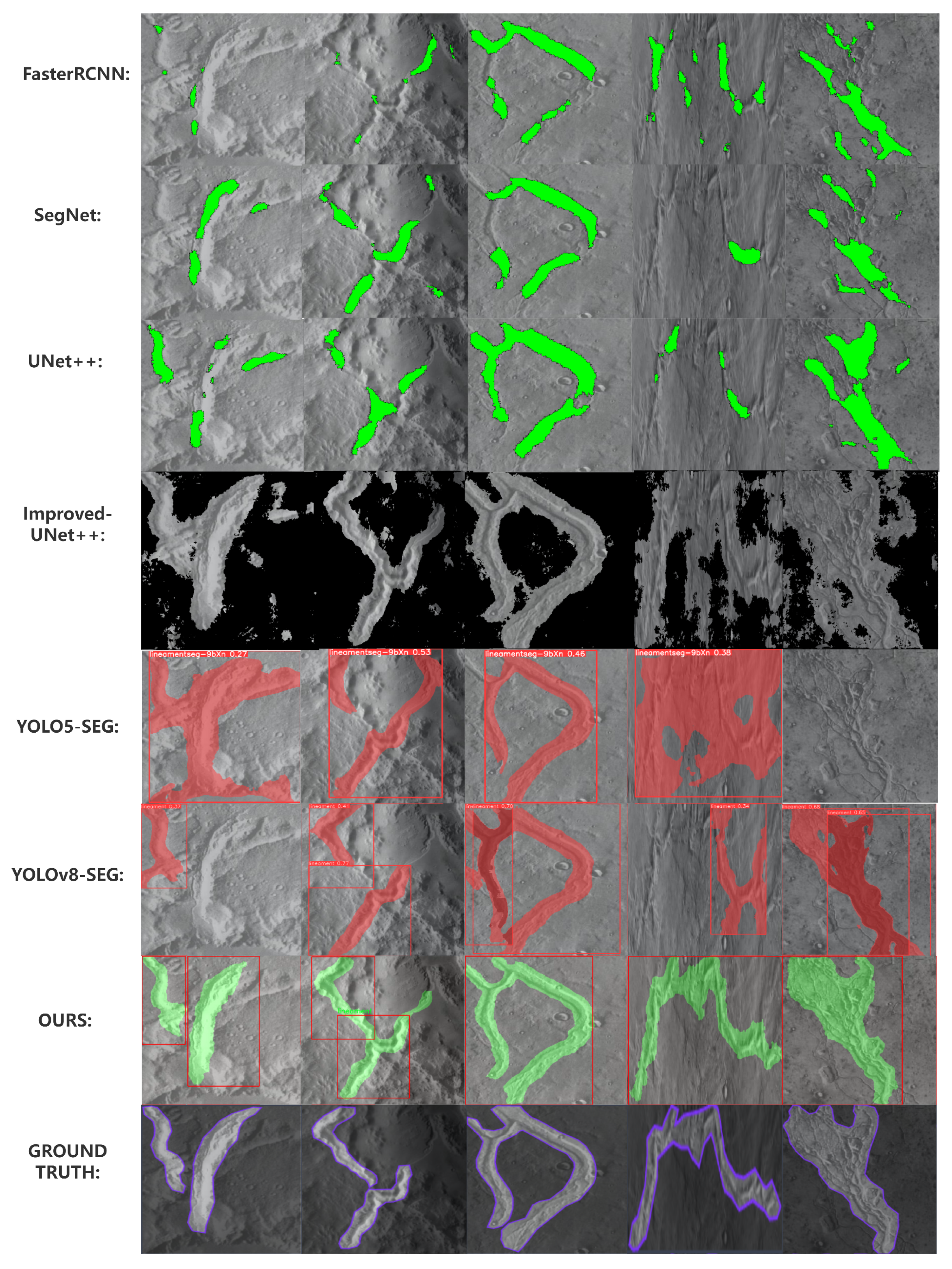
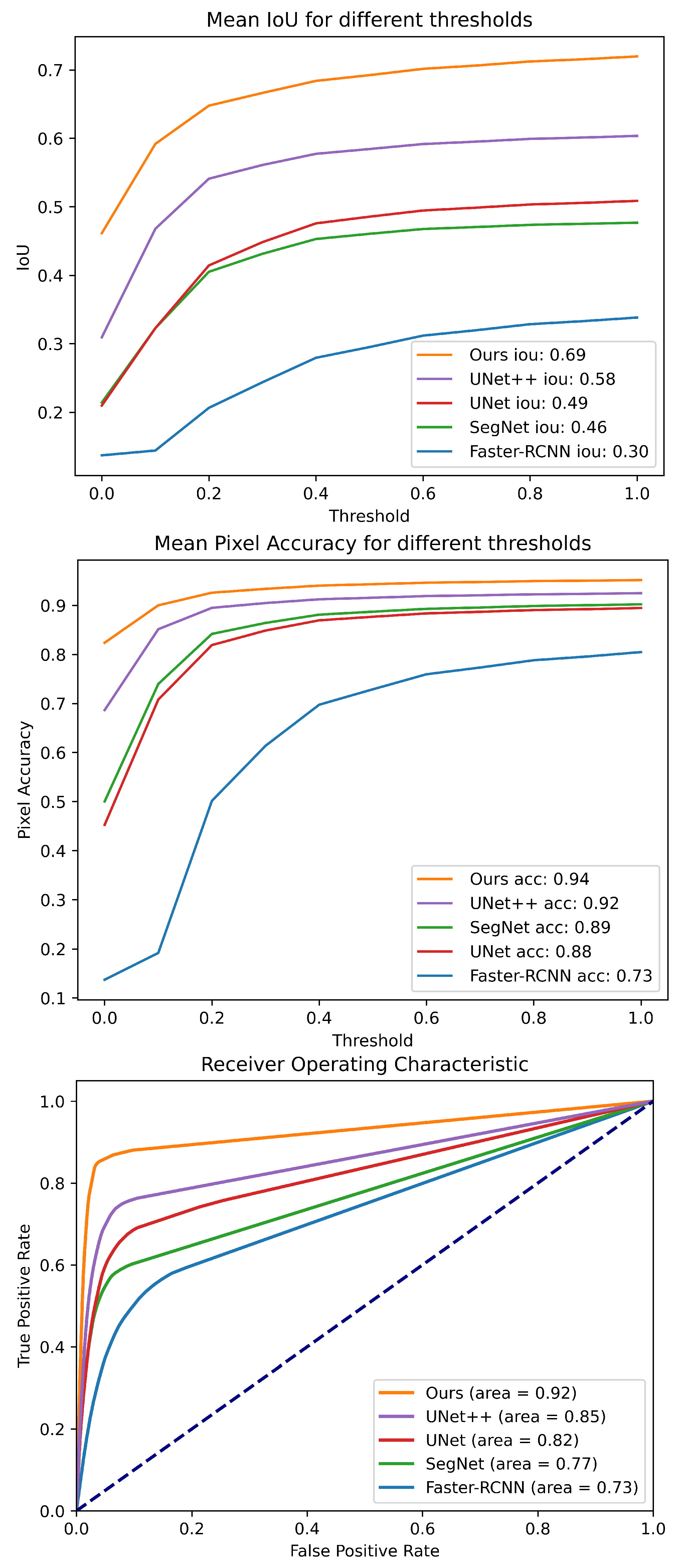
- A new lineament extraction method based on improved-UNet++ and YOLOv5 is proposed. It is able to extract lineament structure with relatively better and more stable performance compared with current mainstream networks and the original UNet++ network. The experiment results show that our method increase the accuracy from 0.64 to 0.67, precision from 0.432 to 0.679, maAP@50 from 0.58 to 0.60 and maAP@50:95 from 0.34 to 0.38, IoU from 0.58 to 0.69, mean pixel accuracy from 0.92 to 0.94.
- A polygon-match strategy is proposed to extract lineament structure with perciser edge detail. It is able to perform preciser edge detail in the instance segmentation of lineament structure result.
2. Related Work
3. Dataset and Methodology
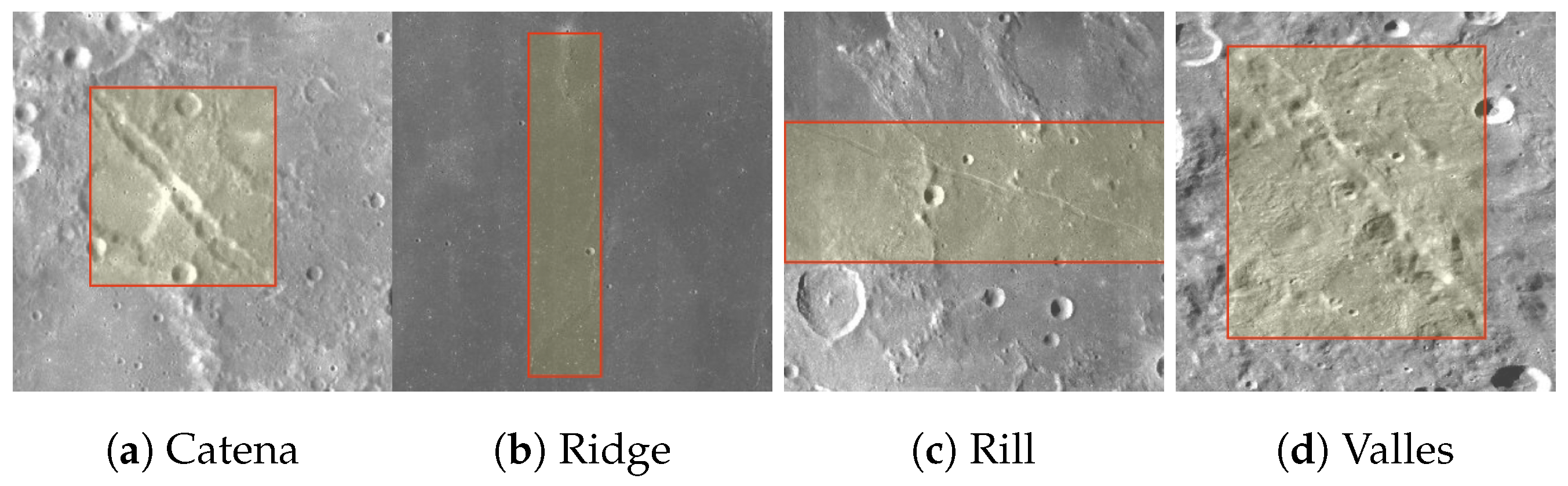
3.1. Dataset Construction
3.2. Diagram of Algorithm
3.3. Network Architecture
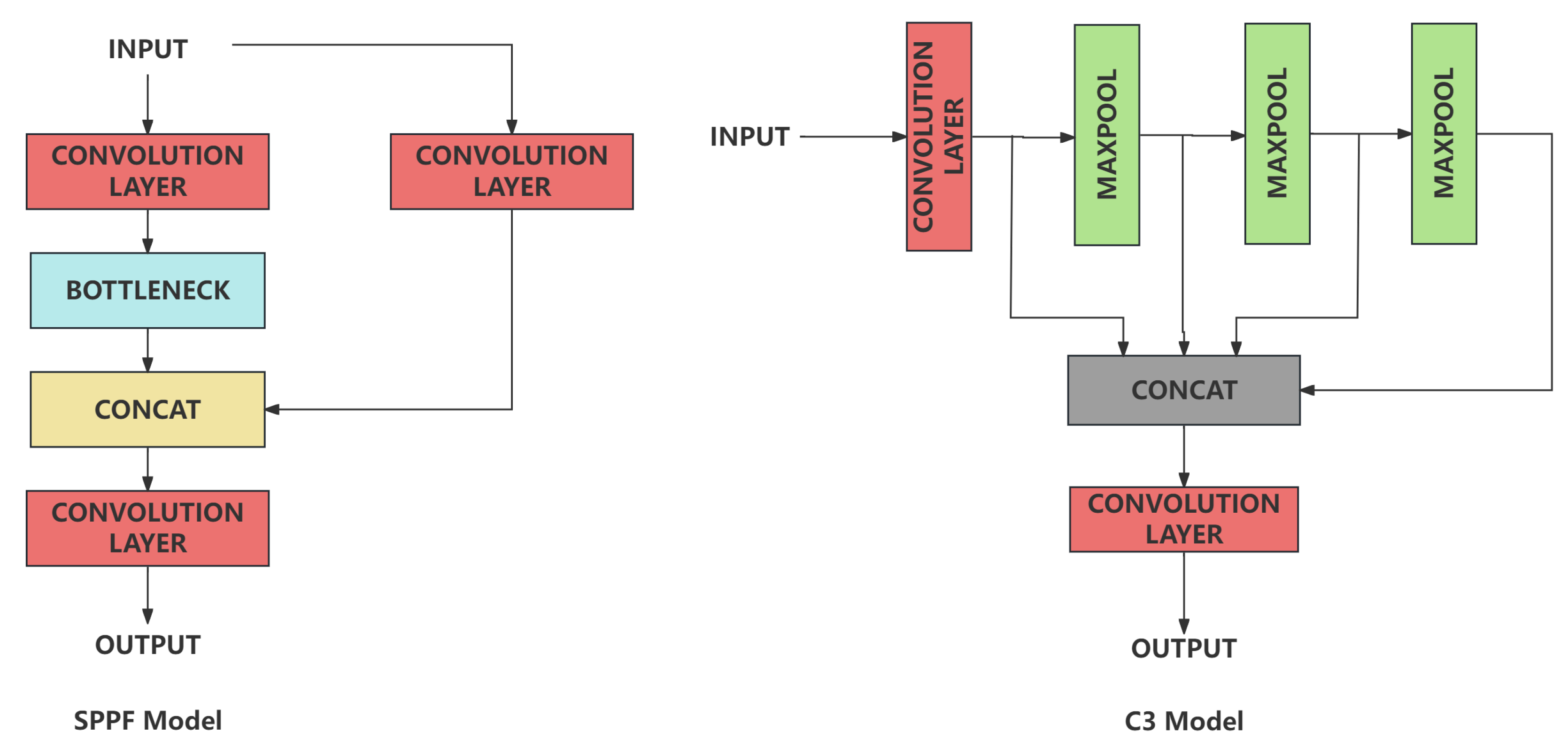
3.3.1. YOLOv5 Network Architecture
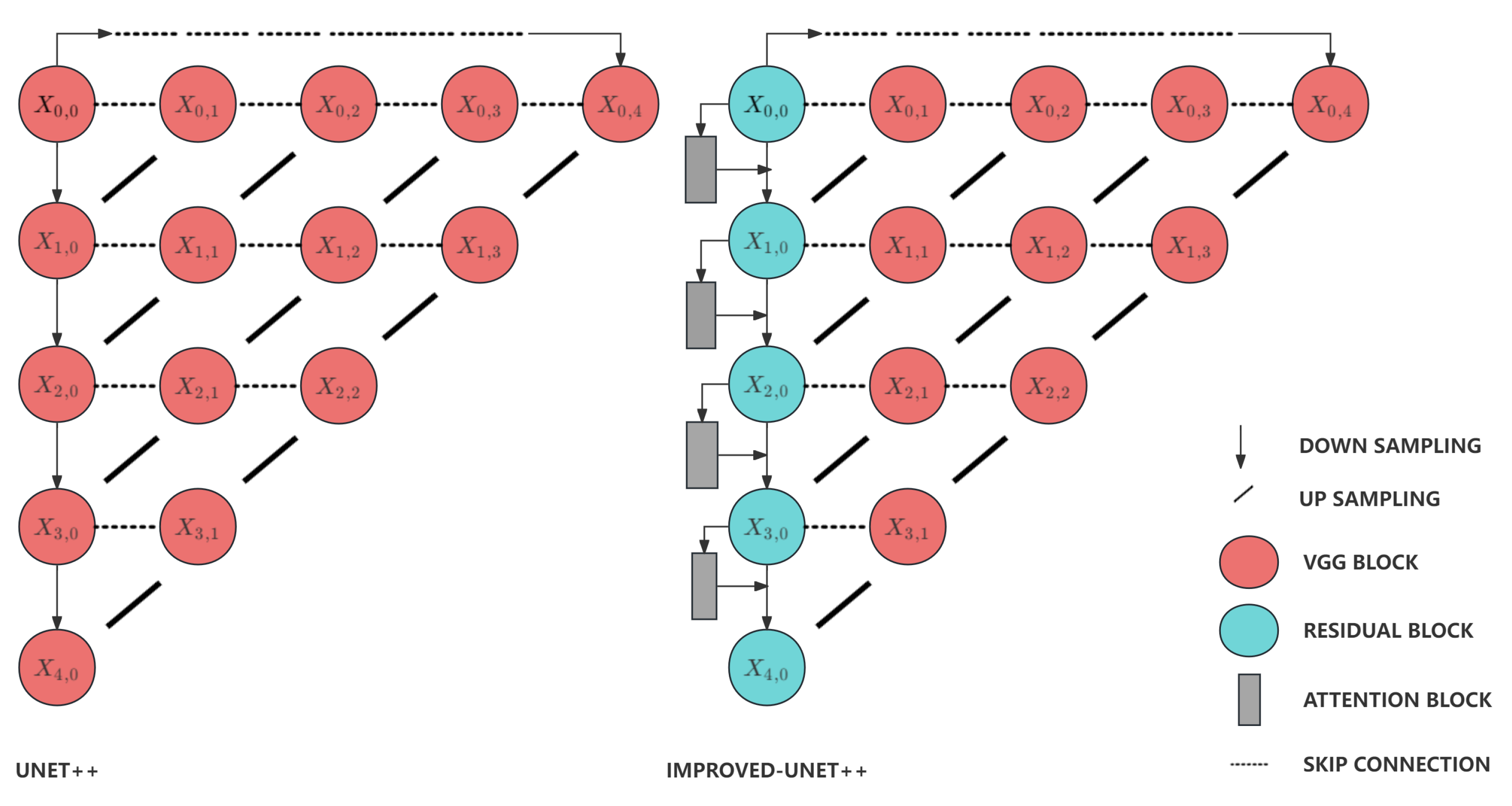
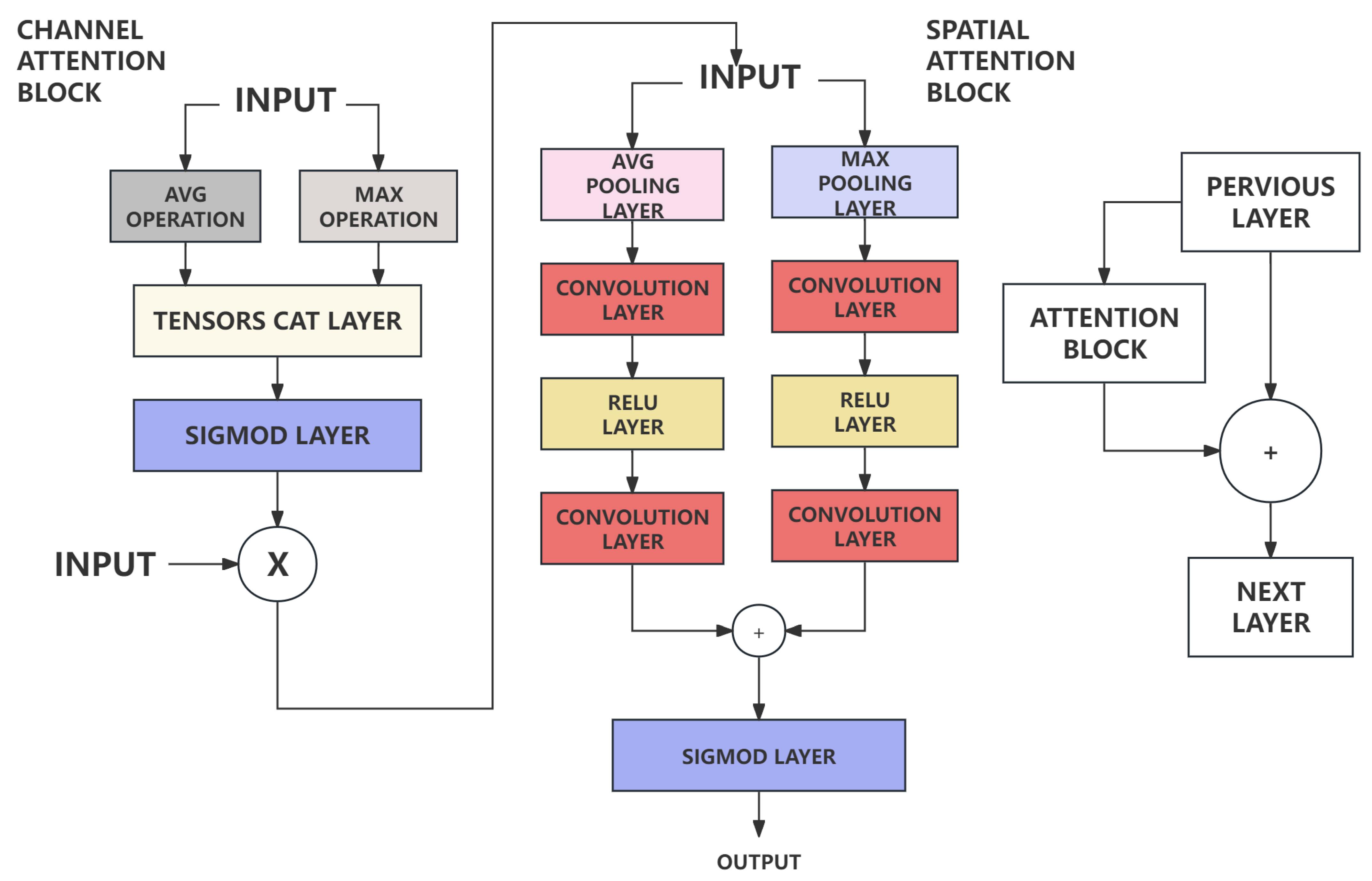
3.3.2. Improved-UNet++ and UNet++ Network Architecture
3.4. Polygon-Match Strategy Algorithm
| Algorithm 1 Polygon-match Algorithm |
|
4. Experiment Results
4.1. Experiment Environment Configuration
- GPU: A4000 x4, RTX3080 x1, RTX3080Ti x1
- CPU: Intel(R) Xeon(R) Gold 6254 CPU @ 3.10 GHz x1,Intel(R) Core 10-10900k CPU @ 3.70GHz x2
- Memory: 16 GB DDR4 3200 MHz x4, 32 GB DDR4 3200 MHz x2
- PyTorch: 2.0.1
- CUDA: 12.3
- Batch Size: 16 (for YOLO networks), 4 (for UNet++ networks)
- Epoch: 300
- Learning Rate: 0.001
- Optimizer: SGD (for YOLO networks), Adam (for UNet++ networks)
4.2. Evaluation Metrics
- FLOPS: (Floating Point Operations Per Second): Usually, this metric is used to measure the complexity of a model and its time consumption. It is calculated based on the number of floating-point operations in the network and the time consumed by the network.
- IoU (Intersection over Union): IoU is usually used to measure the accuracy of the model. It is calculated based on the intersection area and the union area of the prediction and the ground truth.
- Recall: The ratio of the number of correctly predicted positive samples to the total number of positive samples in the dataset. It is usually used to measure the ability of the model to detect positive samples.
- Precision: The ratio of the number of correctly predicted positive samples to the total number of positive samples predicted by the model. It is usually used to measure the ability of the model to detect positive samples.
- mAP50: The average precision of the model when the IoU is greater than 0.5. mAP is the average of the average precision (AP) of all categories. For each category, AP is the average of precision at different recall levels. It is usually used to measure the accuracy of the model.
- mAP@50:95: The average precision of the model when the IoU is greater than 0.5 and less than 0.95. It is usually used to measure the accuracy of the model.
4.3. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Young, R.A.; Brennan, W.J.; Wolfe, R.W.; Nichols, D.J. Volcanism in the lunar maria. Apollo 17: Prelim. Sci. Rep. 1973, 330, 31-1–31-11. [Google Scholar]
- McGill, G.E. Attitude of fractures bounding straight and arcuate lunar rilles. Icarus 1971, 14, 53–58. [Google Scholar] [CrossRef]
- Lucchitta, B.K.; Watkins, J.A. Age of graben systems on the Moon. In Proceedings of the 9th Lunar and Planetary Science Conference, Houston, TX, USA, 13–17 March 1978; Volume 3; (A79-39253 16–91); Pergamon Press, Inc.: New York, NY, USA, 1978; Volume 9, pp. 3459–3472. [Google Scholar]
- Cruikshank, D.; Wood, C. Lunar rilles and Hawaiian volcanic features: Possible analogues. Moon 1972, 3, 412–447. [Google Scholar] [CrossRef]
- Watters, T.R.; Robinson, M.S.; Banks, M.E.; Tran, T.; Denevi, B.W. Recent extensional tectonics on the Moon revealed by the Lunar Reconnaissance Orbiter Camera. Nat. Geosci. 2012, 5, 181–185. [Google Scholar] [CrossRef]
- Mège, D.; Cook, A.; Garel, E.; Lagabrielle, Y.; Cormier, M.H. Surface collapse and volcanic rifting on Mars. In Proceedings of the Lunar and Planetary Science Conference, Houston, TX, USA, 11–15 March 2002; p. 2042. [Google Scholar]
- Melosh, H.J.; Schenk, P. Split comets and the origin of crater chains on Ganymede and Callisto. Nature 1993, 365, 731–733. [Google Scholar] [CrossRef]
- Ferrill, D.A.; Wyrick, D.Y.; Morris, A.P.; Sims, D.W.; Franklin, N.M. Dilational fault slip and pit chain formation on Mars. GsA Today 2004, 14, 4. [Google Scholar] [CrossRef]
- Li, K.; Chen, J.; Tarolli, P.; Sofia, G.; Feng, Z.; Jing, L. Geomorphometric multi-scale analysis for the automatic detection of linear structures on the lunar surface. Earth Sci. Front. 2014, 21, 212–222. [Google Scholar]
- Lin, L.; Jianzhong, L.; Li, Z.; Jinzhu, J.; Dijun, G.; Jingwen, L. Research on the classification system of lunar lineaments. Acta Petrol. Sin. 2017, 33, 3285–3301. [Google Scholar]
- Ahmadi, H.; Pekkan, E. Fault-based geological lineaments extraction using remote sensing and GIS—A review. Geosciences 2021, 11, 183. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Lemoine, F.G.; Mazarico, E.; Torrence, M.H.; McGarry, J.F.; Rowlands, D.D.; Head, J.W., III; Duxbury, T.H.; et al. Initial observations from the lunar orbiter laser altimeter (LOLA). Geophys. Res. Lett. 2010, 37, L18204. [Google Scholar] [CrossRef]
- Vondrak, R.; Keller, J.; Chin, G.; Garvin, J. Lunar Reconnaissance Orbiter (LRO): Observations for lunar exploration and science. Space Sci. Rev. 2010, 150, 7–22. [Google Scholar] [CrossRef]
- Strom, R.G. Analysis of Lunar Lineaments. i-Tectonic Maps of the Moon. 1964. Available online: https://ntrs.nasa.gov/citations/19650040560 (accessed on 2 February 2024).
- Tamililakkiya, V.; Vani, K. Feature Extraction from Lunar Images. In Proceedings of the International Conference on Digital Image Processing and Information Technology, Tirunelveli, India, 23–25 September 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 34–43. [Google Scholar]
- Yan, P.; Su, Y.; Tian, X. Classification of Mars Lineament and Non-Lineament Structure Based on ResNet50. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 25–27 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 437–441. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Yuan, X.; Zhu, J.; Lei, H.; Peng, S.; Wang, W.; Li, X. Duplex-Hierarchy Representation Learning for Remote Sensing Image Classification. Sensors 2024, 24, 1130. [Google Scholar] [CrossRef] [PubMed]
- Raniga, D.; Amarasingam, N.; Sandino, J.; Doshi, A.; Barthelemy, J.; Randall, K.; Robinson, S.A.; Gonzalez, F.; Bollard, B. Monitoring of Antarctica’s Fragile Vegetation Using Drone-Based Remote Sensing, Multispectral Imagery and AI. Sensors 2024, 24, 1063. [Google Scholar] [CrossRef] [PubMed]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Yu, J.; Tan, H.; Wan, X.; Qi, K. MSA-YOLO: A Remote Sensing Object Detection Model Based on Multi-Scale Strip Attention. Sensors 2023, 23, 6811. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Yuan, J.; Li, G.; Wang, H.; Li, X.; Li, D.; Wang, X. RSI-YOLO: Object detection method for remote sensing images based on improved YOLO. Sensors 2023, 23, 6414. [Google Scholar] [CrossRef]
- Kavran, D.; Mongus, D.; Žalik, B.; Lukač, N. Graph Neural Network-Based Method of Spatiotemporal Land Cover Mapping Using Satellite Imagery. Sensors 2023, 23, 6648. [Google Scholar] [CrossRef]
- Aghaee, A.; Shamsipour, P.; Hood, S.; Haugaard, R. A convolutional neural network for semi-automated lineament detection and vectorisation of remote sensing data using probabilistic clustering: A method and a challenge. Comput. Geosci. 2021, 151, 104724. [Google Scholar] [CrossRef]
- Li, Z.; Yan, P.; Liang, J.; Tian, X. Automatic DEM data classification of Mars lineament structure. In Proceedings of the International Conference on Computer Application and Information Security (ICCAIS 2021), Wuhan, China, 18–19 December 2021; SPIE: Cergy, France, 2022; Volume 12260, pp. 474–479. [Google Scholar]
- Lee, C. Automated crater detection on Mars using deep learning. Planet. Space Sci. 2019, 170, 16–28. [Google Scholar] [CrossRef]
- Hsu, C.Y.; Li, W.; Wang, S. Knowledge-driven GeoAI: Integrating spatial knowledge into multi-scale deep learning for Mars Crater detection. Remote Sens. 2021, 13, 2116. [Google Scholar] [CrossRef]
- Li, W.; Zhou, B.; Hsu, C.Y.; Li, Y.; Ren, F. Recognizing terrain features on terrestrial surface using a deep learning model: An example with crater detection. In Proceedings of the 1st Workshop on Artificial Intelligence and Deep Learning for Geographic Knowledge Discovery, Los Angeles, CA, USA, 7–10 November 2017; pp. 33–36. [Google Scholar]
- Robinson, M.S.; Brylow, S.; Tschimmel, M.; Humm, D.; Lawrence, S.; Thomas, P.; Denevi, B.W.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.; et al. Lunar reconnaissance orbiter camera (LROC) instrument overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar] [CrossRef]
- Baranyi, P. PDS Geosciences Node at Washington University in St. Louis. Available online: https://ode.rsl.wustl.edu/moon/index.aspx (accessed on 2 February 2024).
- Wu, W.; Liu, H.; Li, L.; Long, Y.; Wang, X.; Wang, Z.; Li, J.; Chang, Y. Application of local fully Convolutional Neural Network combined with YOLO v5 algorithm in small target detection of remote sensing image. PLoS ONE 2021, 16, e0259283. [Google Scholar] [CrossRef] [PubMed]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. UNet++: Redesigning Skip Connections to Exploit Multiscale Features in Image Segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; Kwon, Y.; Michael, K.; Fang, J.; Yifu, Z.; Wong, C.; Montes, D.; et al. ultralytics/yolov5: V7. 0-yolov5 sota Realtime Instance Segmentation; Zenodo: Geneva, Switzerland, 2022. [Google Scholar]
- Jocher, G.; Chaurasia, A.; Qiu, J. Ultralytics YOLOv8. 2023. Available online: https://docs.ultralytics.com/ (accessed on 2 February 2024).
- Bandi, A.; Adapa, P.V.S.R.; Kuchi, Y.E.V.P.K. The power of generative ai: A review of requirements, models, input–output formats, evaluation metrics, and challenges. Future Internet 2023, 15, 260. [Google Scholar] [CrossRef]
- Croitoru, F.A.; Hondru, V.; Ionescu, R.T.; Shah, M. Diffusion models in vision: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 10850–10869. [Google Scholar] [CrossRef]
- Cao, Y.; Li, S.; Liu, Y.; Yan, Z.; Dai, Y.; Yu, P.S.; Sun, L. A comprehensive survey of ai-generated content (aigc): A history of generative ai from gan to chatgpt. arXiv 2023, arXiv:2303.04226. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | P | R | mAP@50 | mAP@50:95 |
|---|---|---|---|---|
| UNet++ | 0.4326 | 0.6452 | 0.5843 | 0.3493 |
| Residual Block + UNet++ | 0.493 | 0.6642 | 0.6052 | 0.3786 |
| CBAM + UNet++ | 0.40 | 0.39 | 0.0511 | 0.0979 |
| Ours (Residual Block + CBAM + UNet++) | 0.679 | 0.6766 | 0.6081 | 0.3887 |
| Model | P | R | mAP@50 | mAP@50:95 | Parameters | FLOPS |
|---|---|---|---|---|---|---|
| FCN | 0.413 | 0.282 | 0.213 | 0.086 | 102,760,448 | 136.2 G |
| Faster-RCNN | 0.481 | 0.344 | 0.296 | 0.103 | 19,234,523 | 239 G |
| SegNet | 0.4377 | 0.451 | 0.3248 | 0.1422 | 29,461,472 | 165.2 G |
| Deeplabv3+ | 0.4526 | 0.4918 | 0.3943 | 0.1923 | 42,004,074 | 173.82 G |
| UNet++ | 0.4326 | 0.6452 | 0.5843 | 0.3493 | 9,207,472 | 56.88 G |
| YOLOv5-seg | 0.623 | 0.477 | 0.464 | 0.147 | 7,398,422 | 25.7 G |
| YOLOv8-seg | 0.623 | 0.477 | 0.464 | 0.147 | 3,258,259 | 12.0 G |
| Ours | 0.679 | 0.6766 | 0.6081 | 0.3887 | 12,688,568 | 73.81 G |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, P.; Liang, J.; Tian, X.; Zhai, Y. A New Lunar Lineament Extraction Method Based on Improved UNet++ and YOLOv5. Sensors 2024, 24, 2256. https://doi.org/10.3390/s24072256
Yan P, Liang J, Tian X, Zhai Y. A New Lunar Lineament Extraction Method Based on Improved UNet++ and YOLOv5. Sensors. 2024; 24(7):2256. https://doi.org/10.3390/s24072256
Chicago/Turabian StyleYan, Pengcheng, Jiarui Liang, Xiaolin Tian, and Yikui Zhai. 2024. "A New Lunar Lineament Extraction Method Based on Improved UNet++ and YOLOv5" Sensors 24, no. 7: 2256. https://doi.org/10.3390/s24072256
APA StyleYan, P., Liang, J., Tian, X., & Zhai, Y. (2024). A New Lunar Lineament Extraction Method Based on Improved UNet++ and YOLOv5. Sensors, 24(7), 2256. https://doi.org/10.3390/s24072256