
Advancing Slim-Hole Drilling Accuracy: A C-I-WOA-CNN Approach for Temperature-Compensated Pressure Measurements

Abstract
1. Introduction
2. Related Works
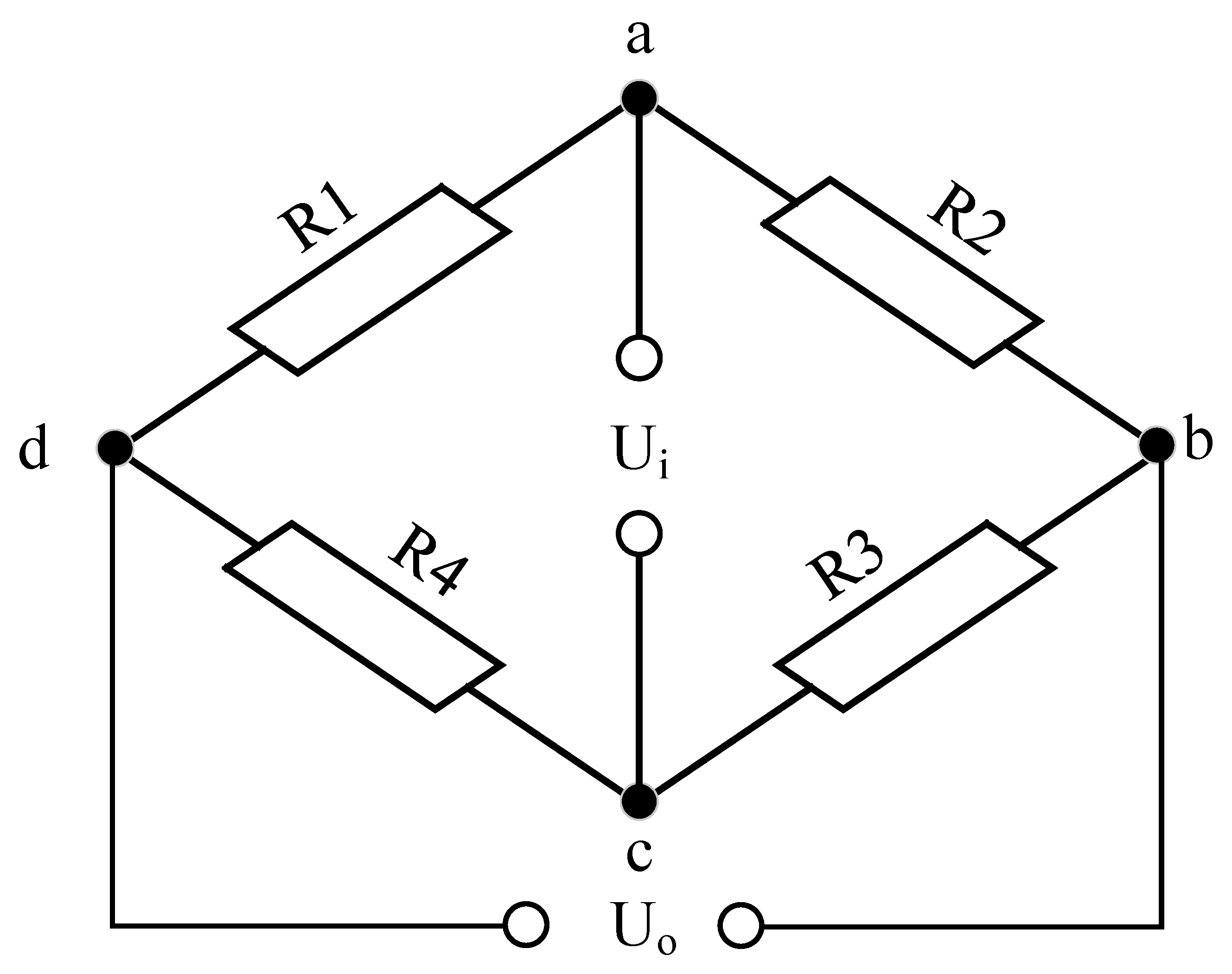
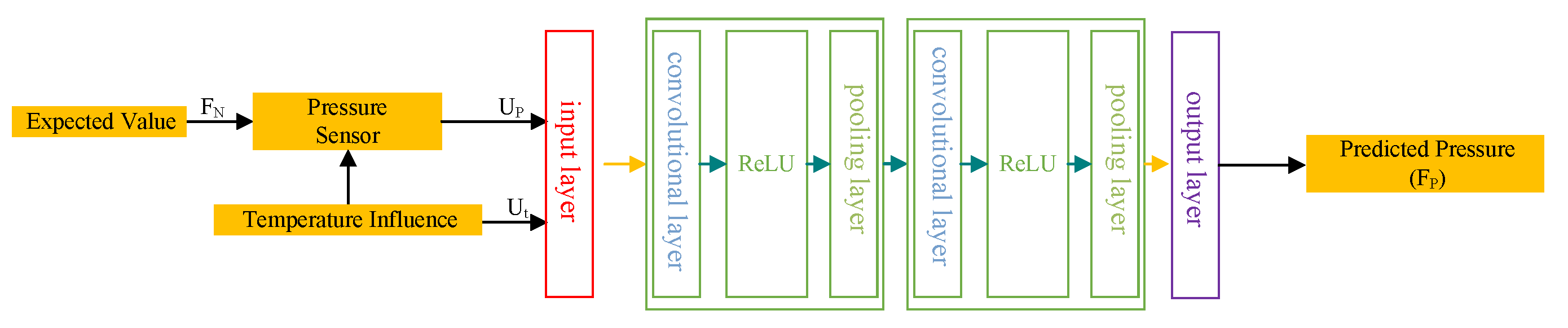
3. Principle of Drilling Pressure Measurement
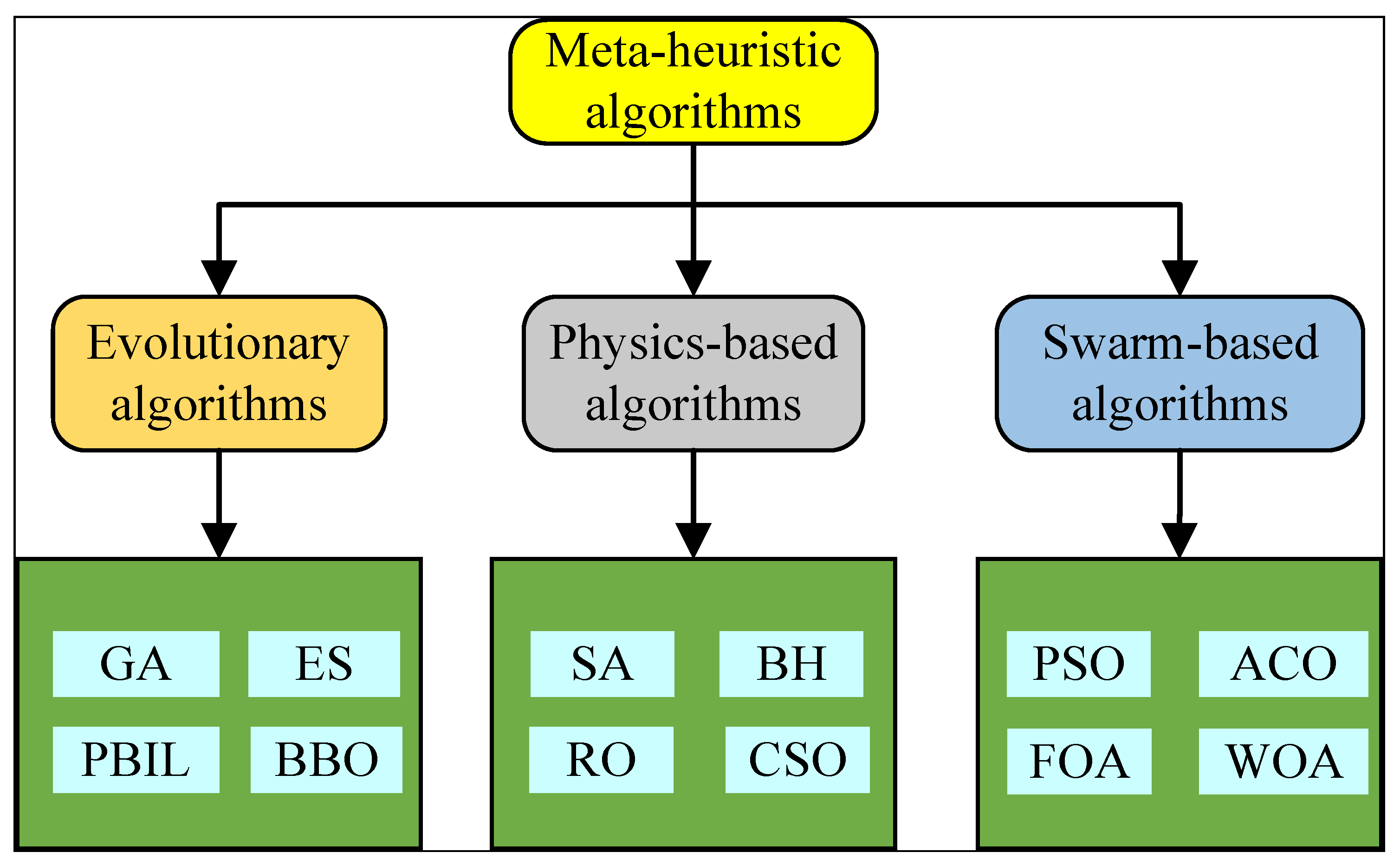
4. Principle of C-I-WOA-CNN
4.1. Neural Network Methods
4.2. Enhancing CNN with Whale Optimization Algorithm (WOA)
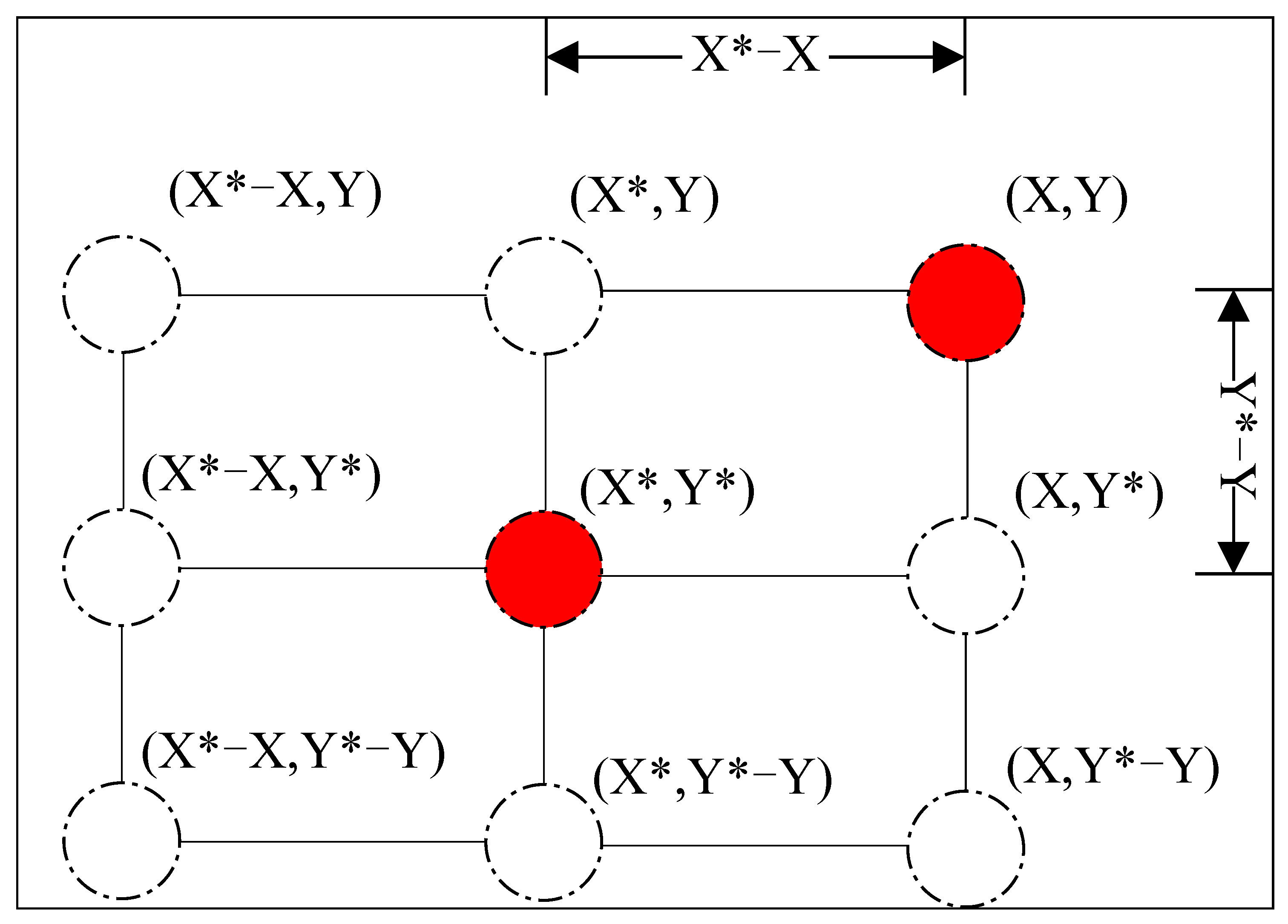
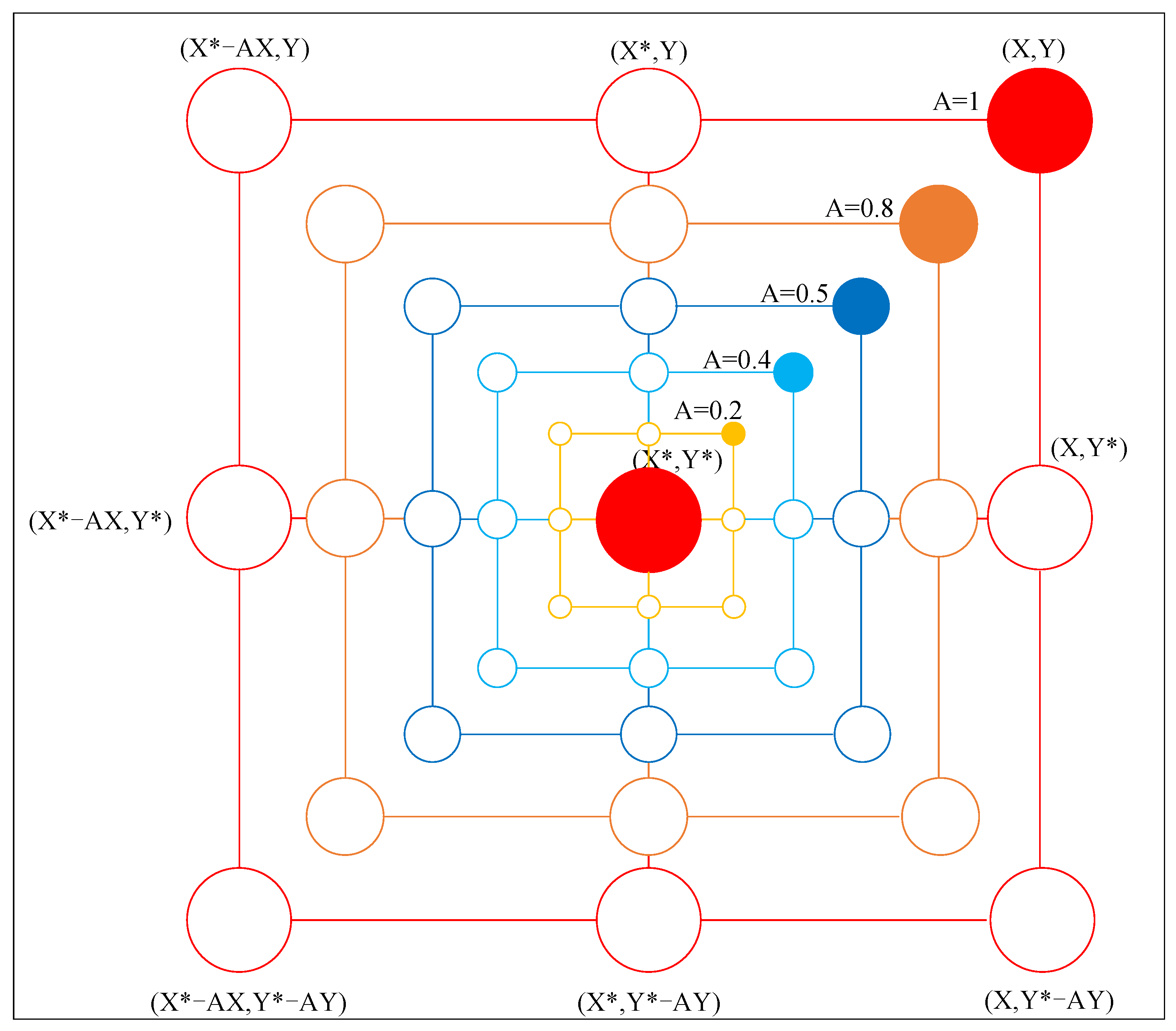
4.2.1. Encircling Prey
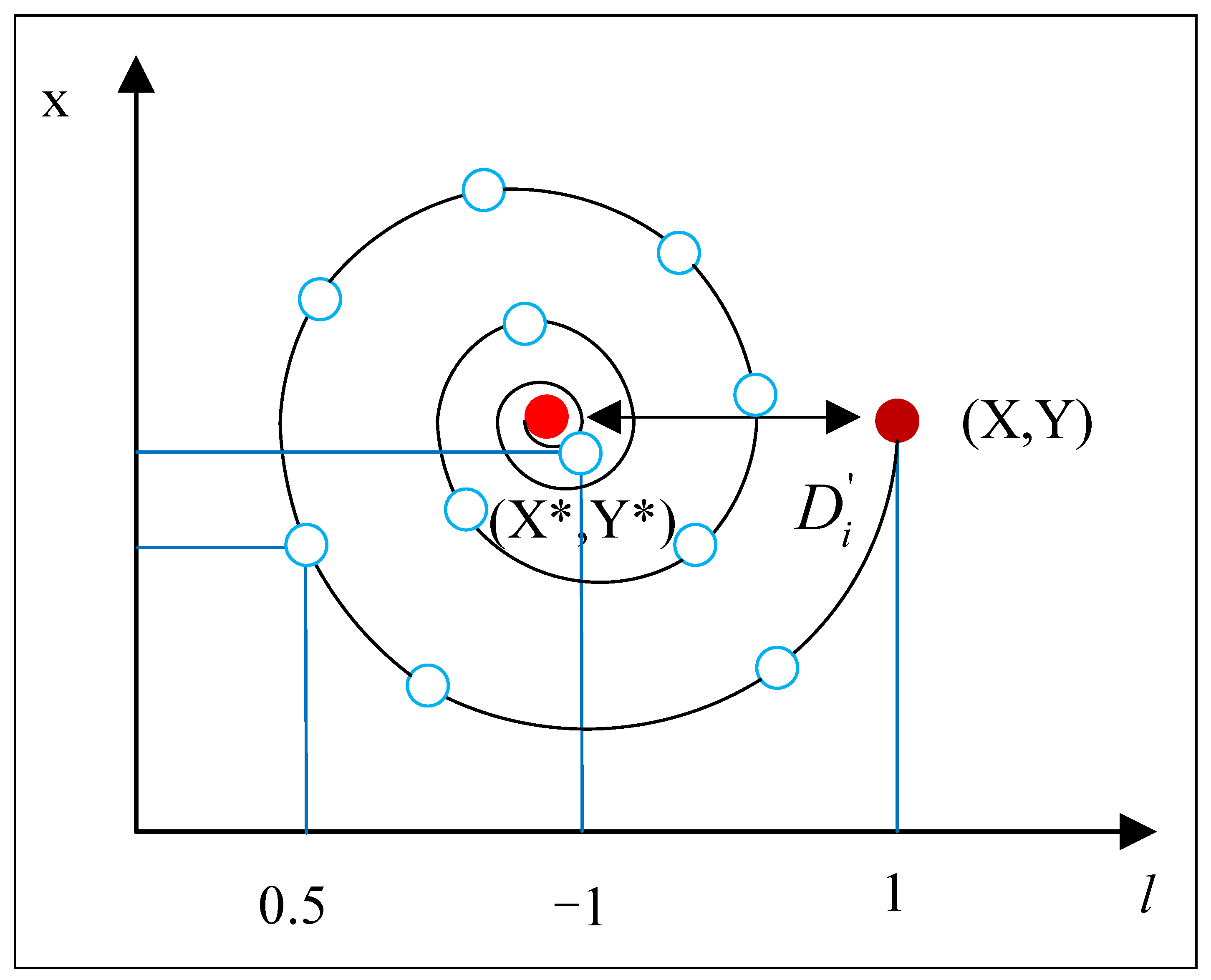
4.2.2. Bubble-Net Attacking Method
4.2.3. Search for Prey
| Algorithm 1 Whale Optimization Algorithm |
|
4.3. Whale Optimization Algorithm Improvement
4.3.1. Chaotic Mapping Whale Optimization Algorithm
4.3.2. Combining Multiple Strategies in Whale Optimization
5. Enhanced Temperature Error Mitigation
5.1. Experimental Setup for Pressure Measurement
5.2. Temperature Compensation Approach
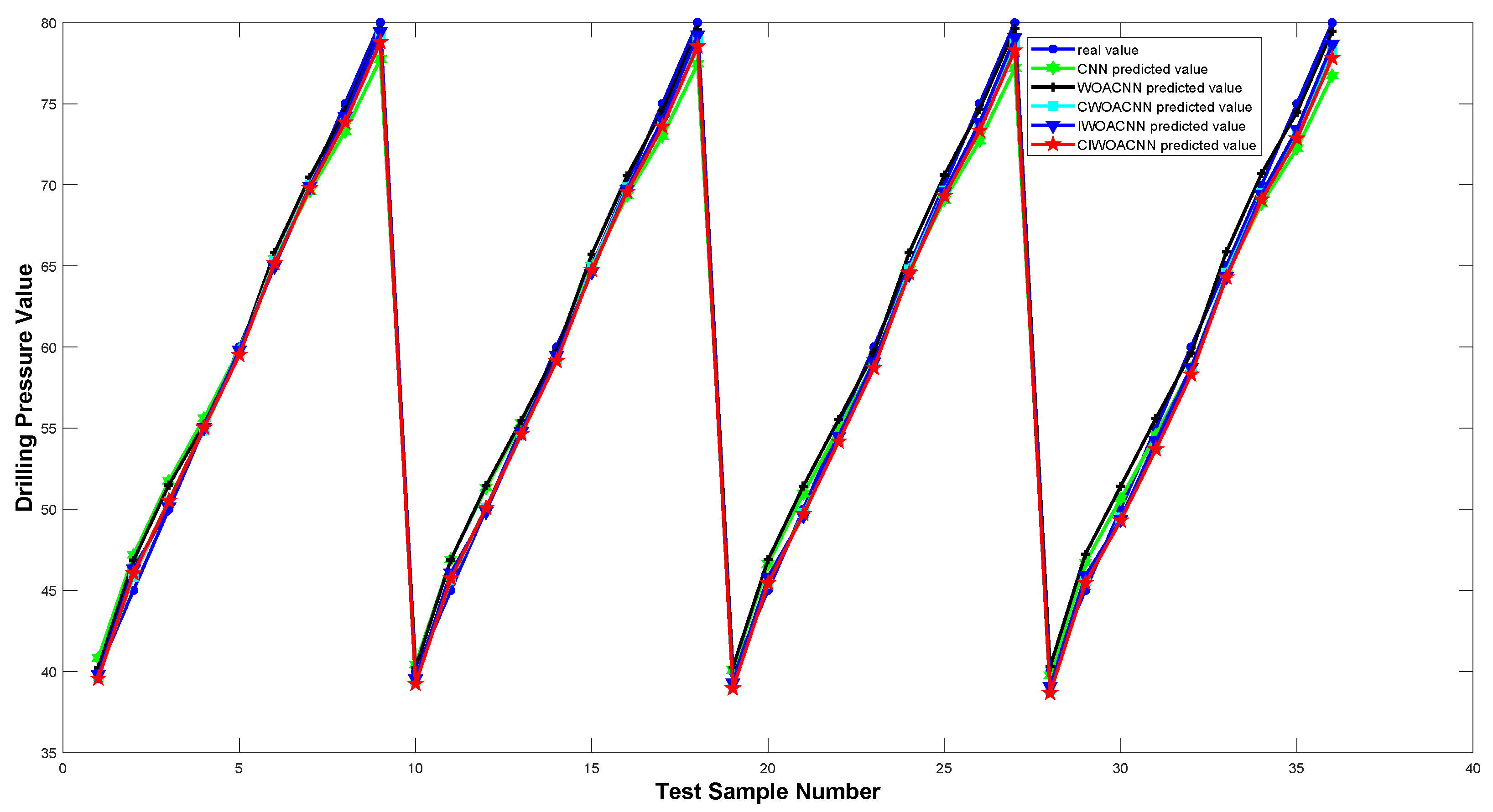
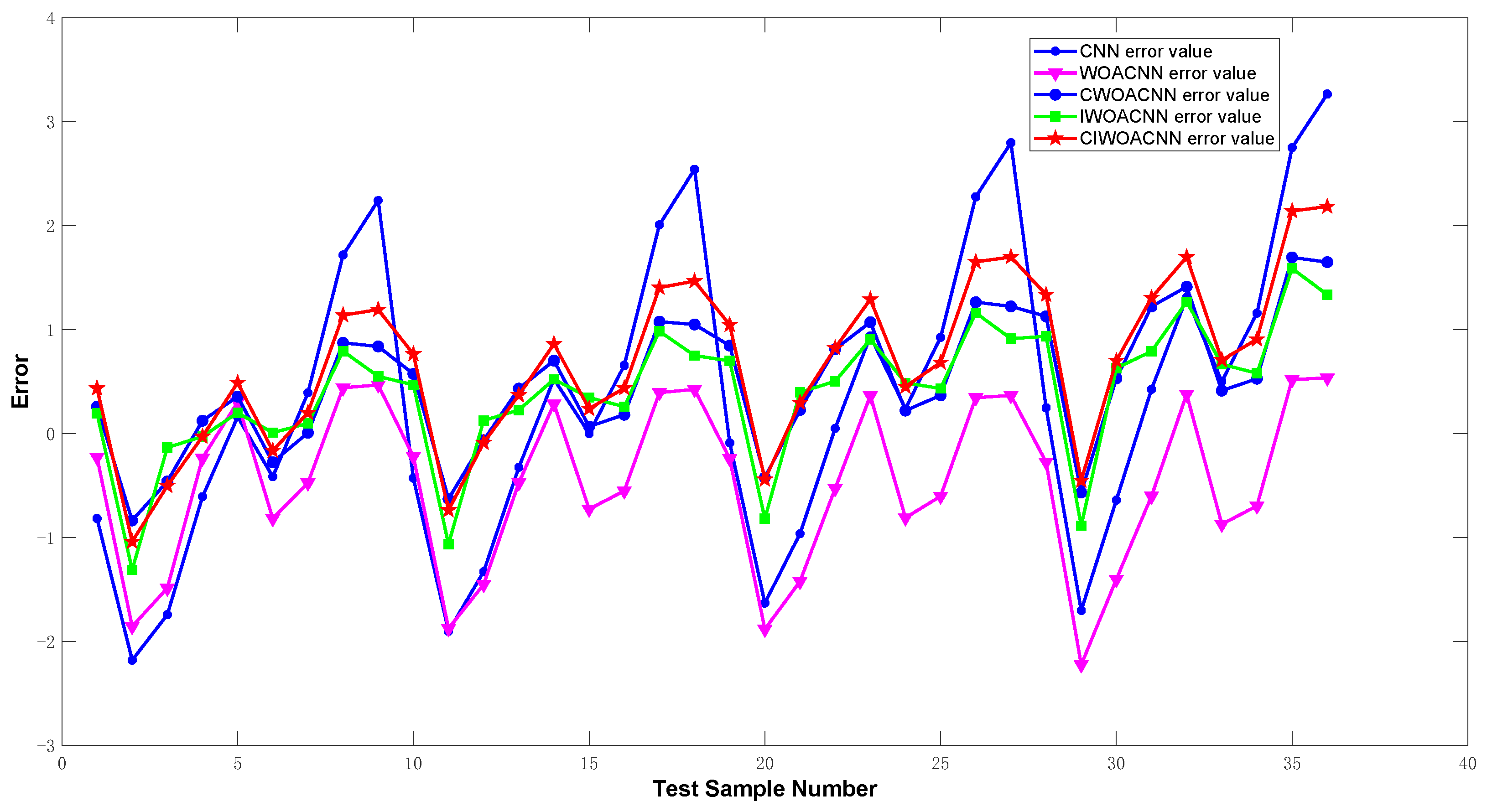
5.3. Comparative Analysis of Optimized Neural Network Models
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bai, J.; Zhang, B.; Zhang, C. Status quo of directional drilling technology for ultra deep ultra slim holes and proposals for future development. Oil Drill. Prod. Technol. 2018, 41, 5–8. [Google Scholar]
- Jones, S.; Smith, J. Advancements in small borehole drilling: A review. J. Pet. Technol. 2019, 71, 430–441. [Google Scholar]
- Smith, A.; Johnson, E. Evaluating the accuracy of linear interpolation for atmospheric and environmental data. Environ. Model. Softw. 2020, 127, 104673. [Google Scholar]
- Thompson, M.; Davis, L. Polynomial fitting for sensor data analysis: Risks and alternatives. Sens. Actuators A Phys. 2021, 319, 112489. [Google Scholar]
- Zhu, Z.F.; Zhang, H.N. Research on nonlinear calibration and temperature compensation method of pressure transmitter. Electron. Meas. Technol. 2021, 44, 71–76. [Google Scholar]
- Martin, G.; Patel, A. Lookup table optimization for sensor data compensation. IEEE Sens. J. 2020, 20, 6789–6796. [Google Scholar]
- Liu, H.; Li, H. Research on temperature compensation method of pressure sensor based on BP neural network. Chin. J. Sens. Actuators 2020, 33, 688–692+732. [Google Scholar]
- Williams, R.; O’Connor, M. Improving BP neural network performance in complex data environments. Neurocomputing 2020, 407, 86–94. [Google Scholar]
- Kumari, N.; Sathiya, S. An Intelligent Temperature Sensor with Non-linearity Compensation Using Convolutional Neural Network. In Proceedings of the International Conference on Industrial Instrumentation and Control: ICI2C 2021, Khourigba, Morocco, 10–11 November 2021; Springer: Singapore, 2022; pp. 319–327. [Google Scholar]
- Chae, M.; Han, S.; Lee, H. Outdoor particulate matter correlation analysis and prediction based deep learning in the Korea. Electronics 2020, 9, 1146. [Google Scholar] [CrossRef]
- Lopez, J.; Hernandez, S. Challenges and strategies for CNN-based image recognition. Artif. Intell. Rev. 2021, 54, 3213–3234. [Google Scholar]
- Nguyen, T.T.; Nguyen, T.H.; Nguyen, T.T.; Nguyen, T.N. Whale optimization algorithm combined with chaotic maps for feature selection. Expert Syst. Appl. 2021, 173, 114726. [Google Scholar]
- Patel, H.; Singh, R.; Kumar, R. Chaotic salp swarm algorithm based optimal power flow for microgrid. Swarm Evol. Comput. 2021, 63, 100899. [Google Scholar]
- Wang, B.; Li, H. Temperature compensation of piezoresistive pressure sensor based on the interpolation of third order splines. Chin. J. Sens. Actuators 2015, 28, 1003–1007. [Google Scholar]
- He, X.; Yuan, Y. Cubic regularization for nonconvex optimization. arXiv 2021, arXiv:2104.06487. [Google Scholar]
- Björck, Å.; Vandewalle, S. Numerical Methods for Least Squares Problems; SIAM: Philadelphia, PA, USA, 1996; Volume 57, pp. 1–32. [Google Scholar]
- Lawson, C.; Hanson, R. Solving Least Squares Problems; SIAM: Philadelphia, PA, USA, 1995; Volume 15. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Zhang, Y.; Wang, J.; Wang, X. Short-term load forecasting by BP neural network with rough set and PSO. Energy Procedia 2011, 12, 471–477. [Google Scholar]
- Young, S.R.; Rose, D.C.; Karnowski, T.P.; Lim, S.H.; Patton, R.M. Optimizing deep learning hyper-parameters through an evolutionary algorithm. In Proceedings of the Workshop on Machine Learning in High-Performance Computing Environments, Austin, TX, USA, 15 November 2015; p. 4. [Google Scholar]
- Shen, H.; Wang, R.; Zhang, J.; McKenna, S.J. Brain tumor segmentation and survival prediction using 3D attention UNet. arXiv 2019, arXiv:1907.07000. [Google Scholar]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Zhang, H.; Yang, Z. Image pattern recognition using neural network based on ant colony optimization. Int. J. Comput. Sci. Netw. Secur. 2008, 8, 109–114. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95. Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Kennedy, J. Particle Swarm Optimization. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2011; pp. 760–766. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man, Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Ma, H.; Zeng, G.; Huang, B. Research on temperature compensation of pressure transmitter based on WOA-BP. Instrum. Tech. Sens. 2020, 6, 33–36. [Google Scholar]
- Zhou, L.; Wang, J.; Li, S.; Zhang, Q.; Liu, Y. Temperature compensation of gas sensor array based on improved whale optimization algorithm. Sens. Actuators B Chem. 2022, 350, 130845. [Google Scholar]
- Yusuf, S.A.; Samad, A.; Garrity, D.J. CLEverReg: A CNN-LSTM based Linear Regression Technique for Temporal Fire Event Modelling. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–7. [Google Scholar]
- Gao, J.; Ye, X.; Lei, X.; Huang, B.; Wang, X.; Wang, L. A Multichannel-Based CNN and GRU Method for Short-Term Wind Power Prediction. Electronics 2023, 12, 4479. [Google Scholar] [CrossRef]
- Apeiranthitis, S.; Zacharia, P.; Chatzopoulos, A.; Papoutsidakis, M. Predictive Maintenance of Machinery with Rotating Parts Using Convolutional Neural Networks. Electronics 2024, 13, 460. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Z.; Guo, Y.; Xing, K. Review of whale optimization algorithm. Appl. Res. Comput. 2023, 40, 328–336. [Google Scholar]
- Sun, Y.; Wang, X.; Chen, Y.; Liu, Z. A modified whale optimization algorithm for large-scale global optimization problems. Expert Syst. Appl. 2018, 114, 563–577. [Google Scholar] [CrossRef]
- Li, M.; Xu, G.; Lai, Q.; Chen, J. A chaotic strategy-based quadratic opposition-based learning adaptive variable-speed whale optimization algorithm. Math. Comput. Simul. 2022, 193, 71–99. [Google Scholar] [CrossRef]
- Wu, G.; Li, Y. Non-maximum suppression for object detection based on the chaotic whale optimization algorithm. J. Vis. Commun. Image Represent. 2021, 74, 102985. [Google Scholar] [CrossRef]
- Feng, J.; Zhang, J.; Zhu, X.; Lian, W. A novel chaos optimization algorithm. Multimed. Tools Appl. 2017, 76, 17405–17436. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, H.; Chen, X.; Yang, J. A grey wolf optimization algorithm based on Cubic mapping and its application. Comput. Eng. Sci. 2021, 43, 2035–2042. [Google Scholar]
- Shi, Y.; Eberhart, R.C. A modified particle swarm optimizer. In Proceedings of the Evolutionary Computation Proceedings, 1998 IEEE World Congress on Computational Intelligence, the 1998 IEEE International Conference on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| p/MPa | 0 °C | 6 °C | 12 °C | 18 °C | 24 °C | 30 °C | 36 °C | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | |
| 0.4 | 83.24 | 0.34 | 83.41 | 6.59 | 86.95 | 12.45 | 87.123 | 18.57 | 88.56 | 24.51 | 90.46 | 30.21 | 91.36 | 36.32 |
| 0.45 | 95.71 | 0.37 | 96.37 | 6.61 | 98.36 | 12.51 | 101.54 | 18.62 | 103.18 | 24.56 | 104.84 | 30.41 | 106.12 | 36.41 |
| 0.5 | 104.8 | 0.42 | 106 | 6.65 | 108.03 | 12.56 | 111.32 | 18.65 | 112.24 | 24.62 | 113.87 | 30.43 | 115.54 | 36.52 |
| 0.55 | 113.4 | 0.46 | 115.6 | 6.73 | 118.37 | 12.58 | 120.51 | 18.67 | 122.56 | 24.75 | 123.67 | 30.47 | 125.17 | 36.56 |
| 0.6 | 124.4 | 0.57 | 129.1 | 6.76 | 130.09 | 12.62 | 131.86 | 18.71 | 133.23 | 24.78 | 134.51 | 30.62 | 135.62 | 36.61 |
| 0.65 | 136.5 | 0.63 | 138.5 | 6.79 | 141.39 | 12.65 | 143.23 | 18.73 | 144.04 | 24.83 | 146.13 | 30.64 | 147.86 | 36.65 |
| 0.7 | 147.9 | 0.74 | 149.4 | 6.83 | 151.31 | 12.68 | 152.64 | 18.78 | 153.62 | 24.87 | 155.05 | 30.71 | 156.63 | 36.68 |
| 0.75 | 155.8 | 0.78 | 157.3 | 6.87 | 158.55 | 12.71 | 160.46 | 18.81 | 162.87 | 24.76 | 164.05 | 30.75 | 165.74 | 36.71 |
| 0.8 | 164.8 | 0.81 | 167.7 | 6.93 | 168.31 | 12.73 | 172.04 | 18.83 | 173.16 | 24.51 | 174.83 | 30.83 | 176.04 | 36.76 |
| p/MPa | 42 °C | 48 °C | 54 °C | 60 °C | 66 °C | 72 °C | 78 °C | |||||||
| Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | Up/mV | Ut/°C | |
| 0.4 | 92.65 | 42.65 | 94.14 | 48.36 | 95.65 | 54.36 | 96.04 | 60.24 | 96.74 | 66.45 | 97.45 | 72.24 | 98.24 | 78.46 |
| 0.45 | 107.8 | 42.68 | 109.2 | 48.39 | 110.36 | 54.39 | 110.87 | 60.26 | 111.63 | 66.47 | 112.31 | 72.26 | 113.79 | 78.48 |
| 0.5 | 117 | 42.71 | 118.5 | 48.42 | 119.65 | 54.42 | 121.24 | 60.34 | 121.87 | 66.51 | 122.47 | 72.29 | 123.14 | 78.51 |
| 0.55 | 126.7 | 42.73 | 128.2 | 48.46 | 129.41 | 54.48 | 130.63 | 60.39 | 131.42 | 66.56 | 131.89 | 72.34 | 132.41 | 78.53 |
| 0.6 | 137.1 | 42.76 | 138.8 | 48.51 | 139.87 | 54.51 | 140.74 | 60.42 | 141.36 | 66.59 | 141.76 | 72.37 | 142.32 | 78.57 |
| 0.65 | 149.2 | 42.82 | 150.6 | 48.56 | 151.64 | 54.53 | 152.68 | 60.47 | 153.13 | 66.62 | 153.89 | 72.41 | 154.65 | 78.62 |
| 0.7 | 158.1 | 42.86 | 159.6 | 48.63 | 161.13 | 54.56 | 161.97 | 60.51 | 162.75 | 66.63 | 163.45 | 72.46 | 164.27 | 78.65 |
| 0.75 | 167.2 | 42.87 | 168.7 | 48.68 | 169.65 | 54.57 | 170.12 | 60.58 | 170.84 | 66.69 | 171.53 | 72.48 | 171.82 | 78.68 |
| 0.8 | 176.5 | 42.93 | 178 | 48.74 | 179.21 | 54.63 | 180.04 | 60.64 | 180.76 | 66.84 | 181.46 | 72.53 | 181.76 | 78.74 |
| P/MPa | 12 °C | 30 °C | 48 °C | 66 °C |
|---|---|---|---|---|
| 0.40 | 39.8323 | 39.6606 | 39.5244 | 39.3895 |
| 0.45 | 46.0485 | 45.9305 | 45.8047 | 46.0165 |
| 0.50 | 50.764 | 50.5898 | 50.431 | 50.2723 |
| 0.55 | 55.2128 | 55.2261 | 55.0571 | 54.8855 |
| 0.60 | 59.6937 | 59.5285 | 59.2875 | 59.0914 |
| 0.65 | 65.4543 | 65.2311 | 65.1976 | 65.1327 |
| 0.70 | 70.2645 | 70.2091 | 70.1342 | 70.0941 |
| 0.75 | 74.4586 | 74.373 | 74.2958 | 73.982 |
| 0.80 | 79.5653 | 79.473 | 79.4085 | 79.099 |
| Model | R-Squared | RPD | Mean Square Error | Mean Absolute Percentage Error |
|---|---|---|---|---|
| CNN | 0.98708 | 9.0489 | 1.1641 | 1.91% |
| WOA-CNN | 0.99485 | 12.2413 | 0.74358 | 1.38% |
| C-WOA-CNN | 0.99603 | 14.0599 | 0.67828 | 1.14% |
| I-WOA-CNN | 0.99657 | 14.2482 | 0.64091 | 1.11% |
| C-I-WOA-CNN | 0.99806 | 18.7464 | 0.48678 | 0.87% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Zhang, X.; Li, X.; Gao, G. Advancing Slim-Hole Drilling Accuracy: A C-I-WOA-CNN Approach for Temperature-Compensated Pressure Measurements. Sensors 2024, 24, 2162. https://doi.org/10.3390/s24072162
Wang F, Zhang X, Li X, Gao G. Advancing Slim-Hole Drilling Accuracy: A C-I-WOA-CNN Approach for Temperature-Compensated Pressure Measurements. Sensors. 2024; 24(7):2162. https://doi.org/10.3390/s24072162
Chicago/Turabian StyleWang, Fei, Xing Zhang, Xintong Li, and Guowang Gao. 2024. "Advancing Slim-Hole Drilling Accuracy: A C-I-WOA-CNN Approach for Temperature-Compensated Pressure Measurements" Sensors 24, no. 7: 2162. https://doi.org/10.3390/s24072162
APA StyleWang, F., Zhang, X., Li, X., & Gao, G. (2024). Advancing Slim-Hole Drilling Accuracy: A C-I-WOA-CNN Approach for Temperature-Compensated Pressure Measurements. Sensors, 24(7), 2162. https://doi.org/10.3390/s24072162