

Migration through Resolution Cell Correction and Sparse Aperture ISAR Imaging for Maneuvering Target Based on Whale Optimization Algorithm—Fast Iterative Shrinkage Thresholding Algorithm

Abstract
1. Introduction
2. Signal Model
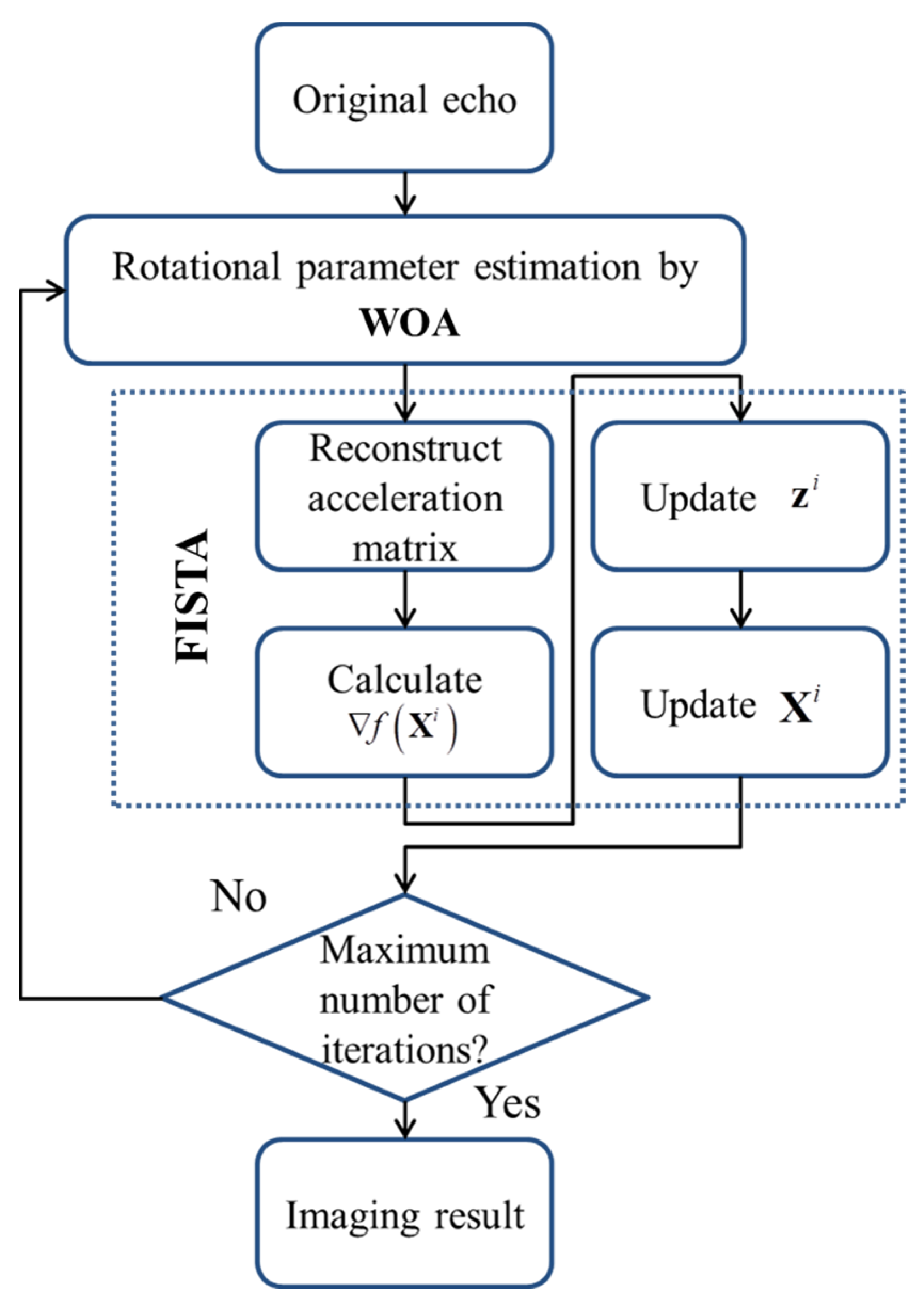
3. The Principle of WOA-FISTA
| Algorithm 1. The pseudocode of FISTA |
| Input: original echo , measured matrix , dictionary matrix , iteration number I, shrinkage threshold Output: Imaging result without MTRC 1. Initialize |
| 2. for i = 1 to I do |
| 3. Calculate |
| 4. Update as 5. Update as |
| 6. end |
| 7. Return |
| Algorithm 2. The pseudocode of WOA |
| Input: Maximum number of iterations , the spiral parameter , number of individuals Output: |
| 1. Generate initial population randomly 2. Repeat 3. Calculate and 4. If then 5. Update the location of all individuals as (24) 6. Else 7. Update the location of all individuals as (25) 8. End if 9. Until 10. return |
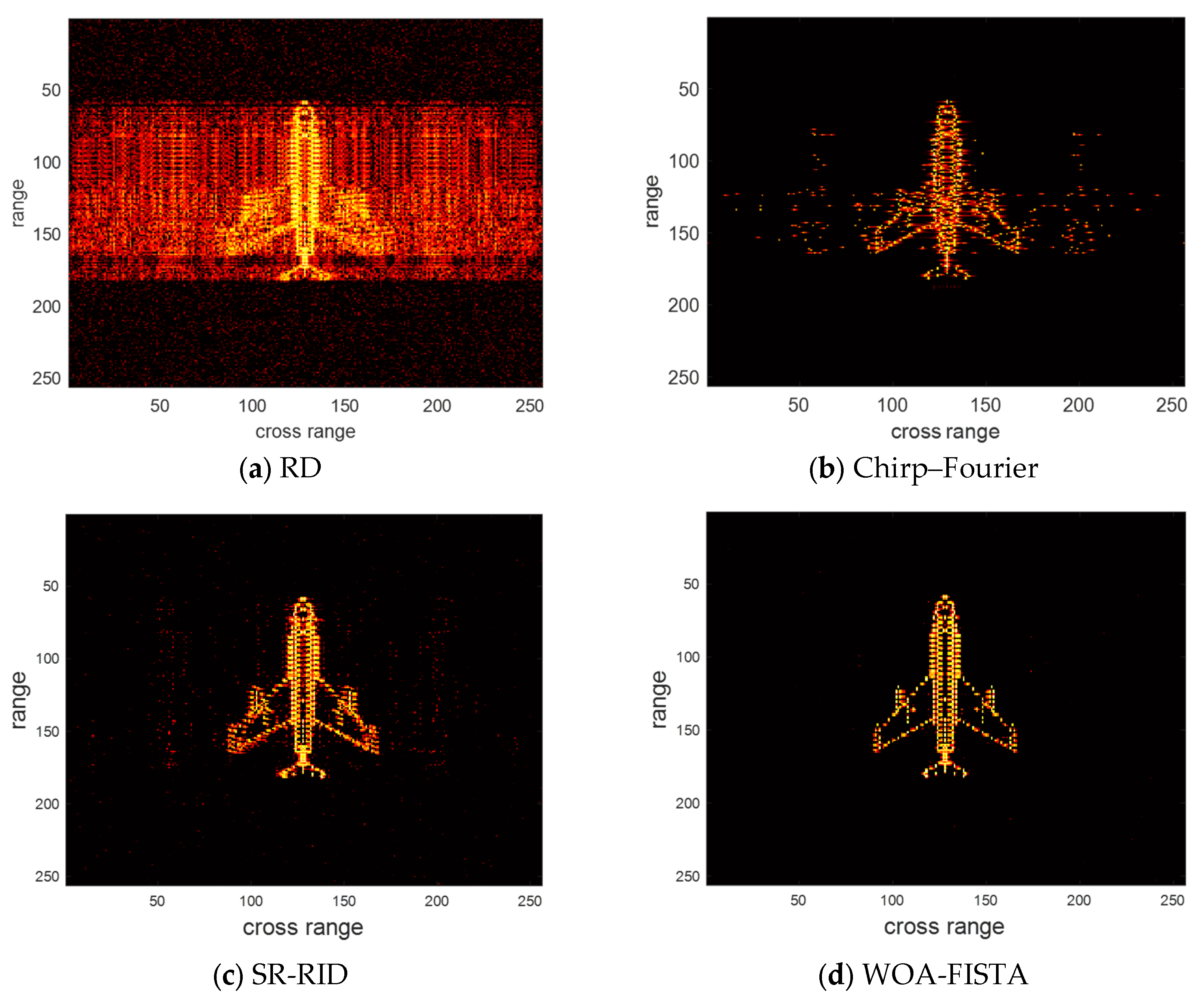
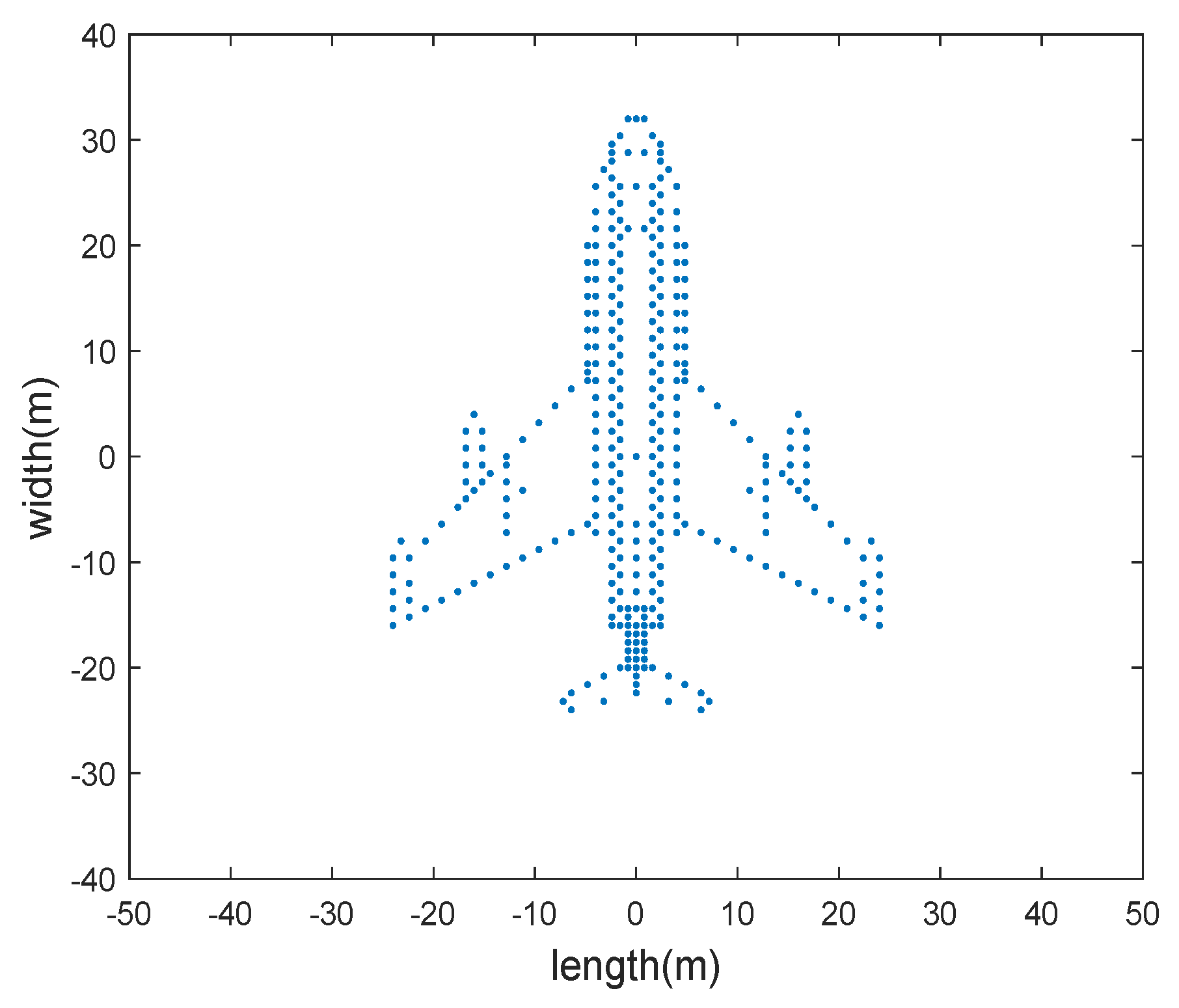
4. Experiments
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ye, W.; Yeo, T.S.; Bao, Z. Weighted least-squares estimation of phase errors for SAR/ISAR autofocus. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2487–2494. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V., Jr. Phase gradient autofocus—A robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef]
- Cai, J.; Martorella, M.; Chang, S.; Liu, Q.; Ding, Z.; Long, T. Efficient Nonparametric ISAR Autofocus Algorithm Based on Contrast Maximization and Newton’s Method. IEEE Sens. J. 2021, 21, 4474–4487. [Google Scholar] [CrossRef]
- Chen, J.; Xing, M.; Yu, H.; Liang, B.; Peng, J.; Sun, G.-C. Motion compensation/autofocus in airborne synthetic aperture radar: A review. IEEE Geosci. Remote Sens. Mag. 2021, 10, 185–206. [Google Scholar] [CrossRef]
- Berizzi, F.; Mese, E.; Diani, M.; Martorella, M. High-resolution ISAR imaging of maneuvering targets by means of the range instantaneous Doppler technique: Modeling and performance analysis. IEEE Trans. Image Process. 2001, 10, 1880–1890. [Google Scholar] [CrossRef] [PubMed]
- Barbarossa, S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform. IEEE Trans. Signal Process. 1995, 43, 1511–1515. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. ISAR imaging of maneuvering target based on the L-class of fourth-order complex-lag PWVD. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1518–1527. [Google Scholar] [CrossRef]
- Wood, J.; Barry, D. Radon transformation of time-frequency distributions for analysis of multicomponent signals. IEEE Trans. Signal Process. 1994, 42, 3166–3177. [Google Scholar] [CrossRef]
- Li, W.-C.; Wang, X.-S.; Wang, G.-Y. Scaled Radon–Wigner transform imaging and scaling of maneuvering target. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 2043–2051. [Google Scholar] [CrossRef]
- Sun, C.; Wang, B.; Fang, Y.; Yang, K.; Song, Z. High-resolution ISAR imaging of maneuvering targets based on sparse reconstruction. Signal Process. 2015, 108, 535–548. [Google Scholar] [CrossRef]
- He, X.; Tong, N.; Hu, X. Dynamic ISAR imaging of maneuvering targets based on sparse matrix recovery. Signal Process. 2017, 134, 123–129. [Google Scholar] [CrossRef]
- Li, X.; Cui, G.; Kong, L.; Yi, W. Fast Non-Searching Method for Maneuvering Target Detection and Motion Parameters Estimation. IEEE Trans. Signal Process. 2016, 64, 2232–2244. [Google Scholar] [CrossRef]
- Yang, T.L.; Yang, L.; BI, G.A. ISAR cross-range scaling algorithm based on LVD. In Proceedings of the 2016 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016. [Google Scholar]
- Li, Y.; Su, T.; Zheng, J.; He, X. ISAR imaging of targets with complex motions based on modified Lv’s distribution for cubic phase signal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4775–4784. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Q.; Zhao, B. ISAR imaging of target with complex motion based on novel approach for the parameters estimation of multi-component cubic phase signal. Multidimens. Syst. Signal Process. 2017, 29, 1285–1307. [Google Scholar] [CrossRef]
- Wang, B.; Xu, S.; Wu, W.; Hu, P.; Chen, Z. Adaptive ISAR imaging of maneuvering targets based on a modified Fourier transform. Sensors 2018, 18, 1370. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, Y.; Li, S. Inverse synthetic aperture radar imaging of ship targets with complex motion based on match Fourier transform for cubic chirps model. IET Radar Sonar Navig. 2013, 7, 994–1003. [Google Scholar] [CrossRef]
- Wang, Y. Inverse synthetic aperture radar imaging of manoeuvring target based on range-instantaneous-Doppler and range-instantaneous-chirp-rate algorithms. IET Radar Sonar Navig. 2012, 6, 921–928. [Google Scholar] [CrossRef]
- Djurovic, I.; Simeunovic, M.; Djukanovic, S.; Wang, P. A Hybrid CPF-HAF Estimation of Polynomial-Phase Signals: Detailed Statistical Analysis. IEEE Trans. Signal Process. 2012, 60, 5010–5023. [Google Scholar] [CrossRef]
- Xing, M.; Wu, R.; Lan, J.; Bao, Z. Migration through resolution cell compensation in ISAR imaging. IEEE Geosci. Remote Sens. Lett. 2004, 1, 141–144. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Wang, X.; Xia, X.G. ISAR imaging of maneuvering targets via matching pursuit. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 1625–1628. [Google Scholar]
- Liu, Z.; You, P.; Wei, X.; Li, X. Dynamic ISAR imaging of maneuvering targets based on sequential SL0. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1041–1045. [Google Scholar] [CrossRef]
- Kang, H.; Li, J.; Guo, Q.; Martorella, M. Pattern Coupled Sparse Bayesian Learning Based on UTAMP for Robust High Resolution ISAR Imaging. IEEE Sens. J. 2020, 20, 13734–13742. [Google Scholar] [CrossRef]
- Wei, S.; Liang, J.; Wang, M.; Shi, J.; Zhang, X.; Ran, J. AF-AMPNet: A Deep Learning Approach for Sparse Aperture ISAR Imaging and Autofocusing. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–14. [Google Scholar] [CrossRef]
- Li, R.; Zhang, S.; Zhang, C.; Liu, Y.; Li, X. Deep Learning Approach for Sparse Aperture ISAR Imaging and Autofocusing Based on Complex-Valued ADMM-Net. IEEE Sens. J. 2020, 21, 3437–3451. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Song, X.F.; Zhang, Y.; Gong, D.W.; Gao, X.Z. A fast hybrid feature selection based on correlation-guided clustering and whale optimization algorithm for high-dimensional data. IEEE Trans. Cybern. 2021, 52, 9573–9586. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Wu, X.; Palade, V.; Fang, W.; Shi, Y. Random drift whale optimization algorithm: Convergence analysis and parameter selection. Mach. Learn. 2015, 101, 345–376. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, B.; Chen, Y. Robust airfoil optimization based on improved whale optimization algorithm method. Appl. Math. Mech. 2011, 32, 1245–1254. [Google Scholar] [CrossRef]
- Tian, Y.; Si, L.; Zhang, X.; Cheng, R.; He, C.; Tan, K.C.; Jin, Y. Evolutionary large-scale multi-objective optimization: A survey. ACM Comput. Surv. (CSUR) 2021, 54, 1–34. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.6532 | 7.2164 | 7.4761 | 6.7806 |
| Contrast | 5.3621 | 8.6965 | 9.2114 | 11.3673 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 9.8706 | 7.9654 | 8.2361 | 7.4120 |
| Contrast | 4.2034 | 8.1012 | 7.3644 | 10.0287 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.8768 | 7.8175 | 7.3484 | 6.6332 |
| Contrast | 3.7621 | 6.7904 | 8.0337 | 10.9128 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 7.8936 | 7.0361 | 7.3685 | 6.7612 |
| Contrast | 6.1341 | 8.8696 | 8.1777 | 9.6532 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.6212 | 7.2736 | 7.8310 | 6.9367 |
| Contrast | 4.8775 | 8.3906 | 7.5161 | 9.0168 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.1366 | 7.3736 | 7.5216 | 6.8102 |
| Contrast | 5.2047 | 8.6627 | 8.1690 | 9.3679 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.3961 | 7.7360 | 7.5933 | 6.8416 |
| Contrast | 4.7648 | 7.6724 | 8.1593 | 9.0167 |
| RD | Chirp–Fourier | SR-RID | WOA-FISTA | |
|---|---|---|---|---|
| Entropy | 8.8363 | 8.2135 | 7.6714 | 6.9726 |
| Contrast | 4.2165 | 6.3408 | 7.7109 | 8.8124 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Liu, F.; Huang, D. Migration through Resolution Cell Correction and Sparse Aperture ISAR Imaging for Maneuvering Target Based on Whale Optimization Algorithm—Fast Iterative Shrinkage Thresholding Algorithm. Sensors 2024, 24, 2148. https://doi.org/10.3390/s24072148
Guo X, Liu F, Huang D. Migration through Resolution Cell Correction and Sparse Aperture ISAR Imaging for Maneuvering Target Based on Whale Optimization Algorithm—Fast Iterative Shrinkage Thresholding Algorithm. Sensors. 2024; 24(7):2148. https://doi.org/10.3390/s24072148
Chicago/Turabian StyleGuo, Xinrong, Fengkai Liu, and Darong Huang. 2024. "Migration through Resolution Cell Correction and Sparse Aperture ISAR Imaging for Maneuvering Target Based on Whale Optimization Algorithm—Fast Iterative Shrinkage Thresholding Algorithm" Sensors 24, no. 7: 2148. https://doi.org/10.3390/s24072148
APA StyleGuo, X., Liu, F., & Huang, D. (2024). Migration through Resolution Cell Correction and Sparse Aperture ISAR Imaging for Maneuvering Target Based on Whale Optimization Algorithm—Fast Iterative Shrinkage Thresholding Algorithm. Sensors, 24(7), 2148. https://doi.org/10.3390/s24072148