
Practical RGB-to-XYZ Color Transformation Matrix Estimation under Different Lighting Conditions for Graffiti Documentation

 ,
,  , and
, and 
Abstract
1. Introduction
- Assessment of the WPP technique under different illumination conditions;
- Evaluation of the influence of color charts from different manufacturers on this process;
- Comparison of an ordinary least squares (OLS) model versus a set of linear regression algorithms;
- Analysis of the color accuracy achieved by applying the RGB-to-XYZ transformation matrix to a real-world scenario with graffiti photos.
2. Materials and Methods
2.1. RGB-to-XYZ Color Transformation Matrix Computation
2.2. White Point Preservation Constraint
2.3. Spectral Data
- Calibrite ColorChecker Digital SG (CCDSG, 96 patches or color samples when the achromatic patches from the edges are removed);
- Calibrite ColorChecker Classic (CCC, 24 patches);
- X-rite ColorChecker Passport Photo 2 (XRCCPP, 24 patches);
- Datacolor Spyder Checkr (SCK100, 48 patches).
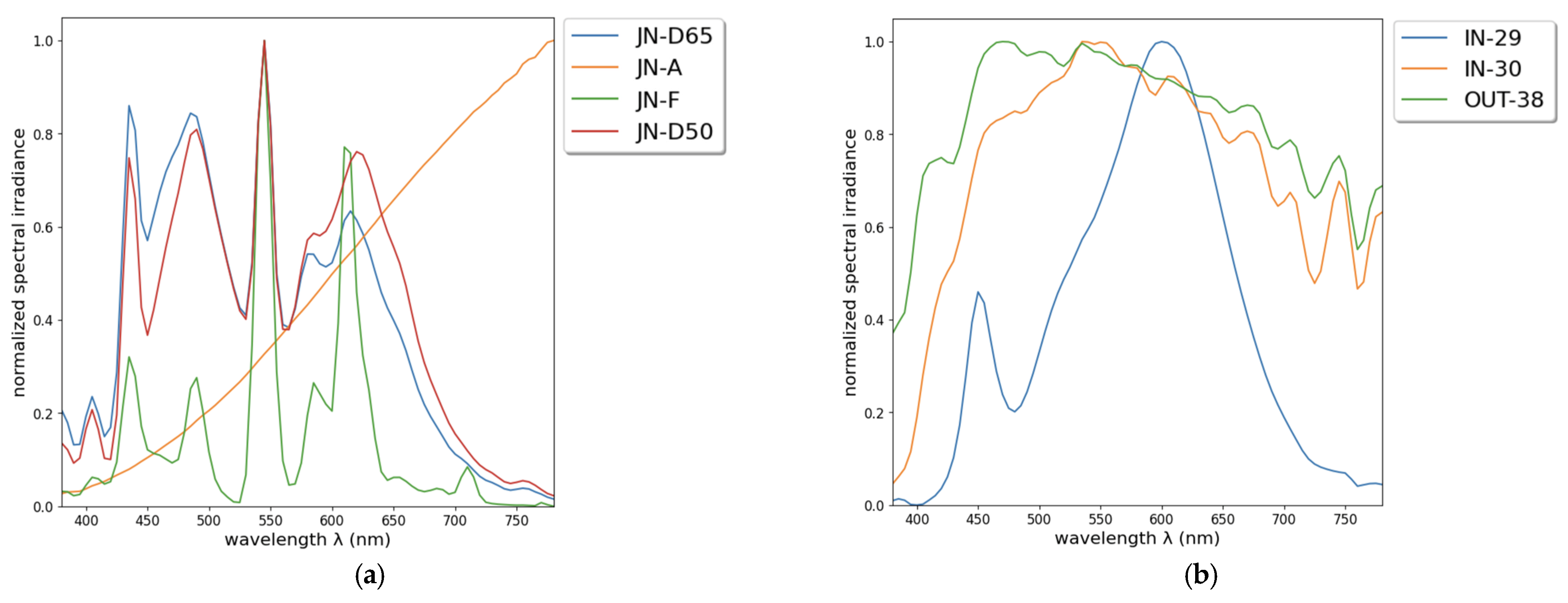
2.4. Illuminants
2.5. Digital Photos
2.6. Three Model Datasets
2.7. Linear Regression Model Comparison
- Loading the model data (i.e., the RAW RGB and CIE XYZ triplets of the color patches).
- Splitting these patches into two randomly selected datasets: training (80%) and testing (20%).
- OLS model regression adjustment using the training data to obtain the coefficients for the transformation matrix.
- Model assessment from test data. The RMSE and the CIE XYZ residuals for the predicted values were computed. Also, color difference metrics were calculated to evaluate the color accuracy obtainable via the computed transformation matrix (Section 2.8).
2.8. Model Assessment
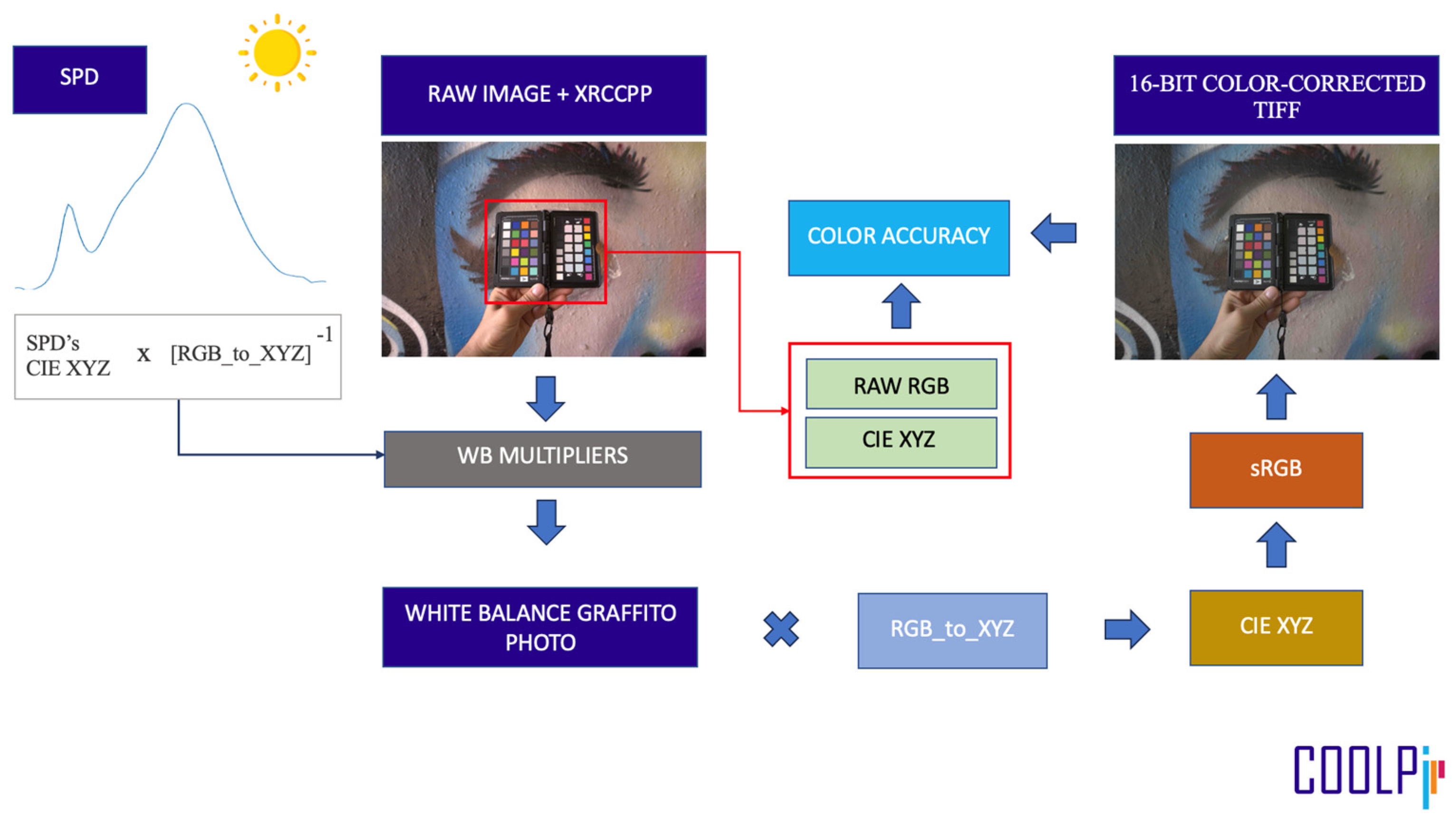
2.9. Methodological Application in a Real Scenario
- Load and minimally process (see Section 2.5) the RAW graffito sample photo, which includes an XRCCPP as a colorimetric reference;
- Obtain the measured SPD of the illuminant corresponding to the graffito photo;
- Compute the SPD’s CIE XYZ values and multiply them by the inverse of the transformation matrix to yield the white balance multipliers;
- Apply the multipliers to compute the white-balanced graffito photo;
- Apply the RGB-to-XYZ color transformation to the white-balanced graffito photo;
- Transform the CIE XYZ to sRGB to obtain a 16-bit color-corrected TIFF image;
- Extract the RAW RGB data of the patches of the XRCCPP (for color accuracy evaluation);
- Assess the color accuracy achieved after the process (computing the metrics described in Section 2.8).
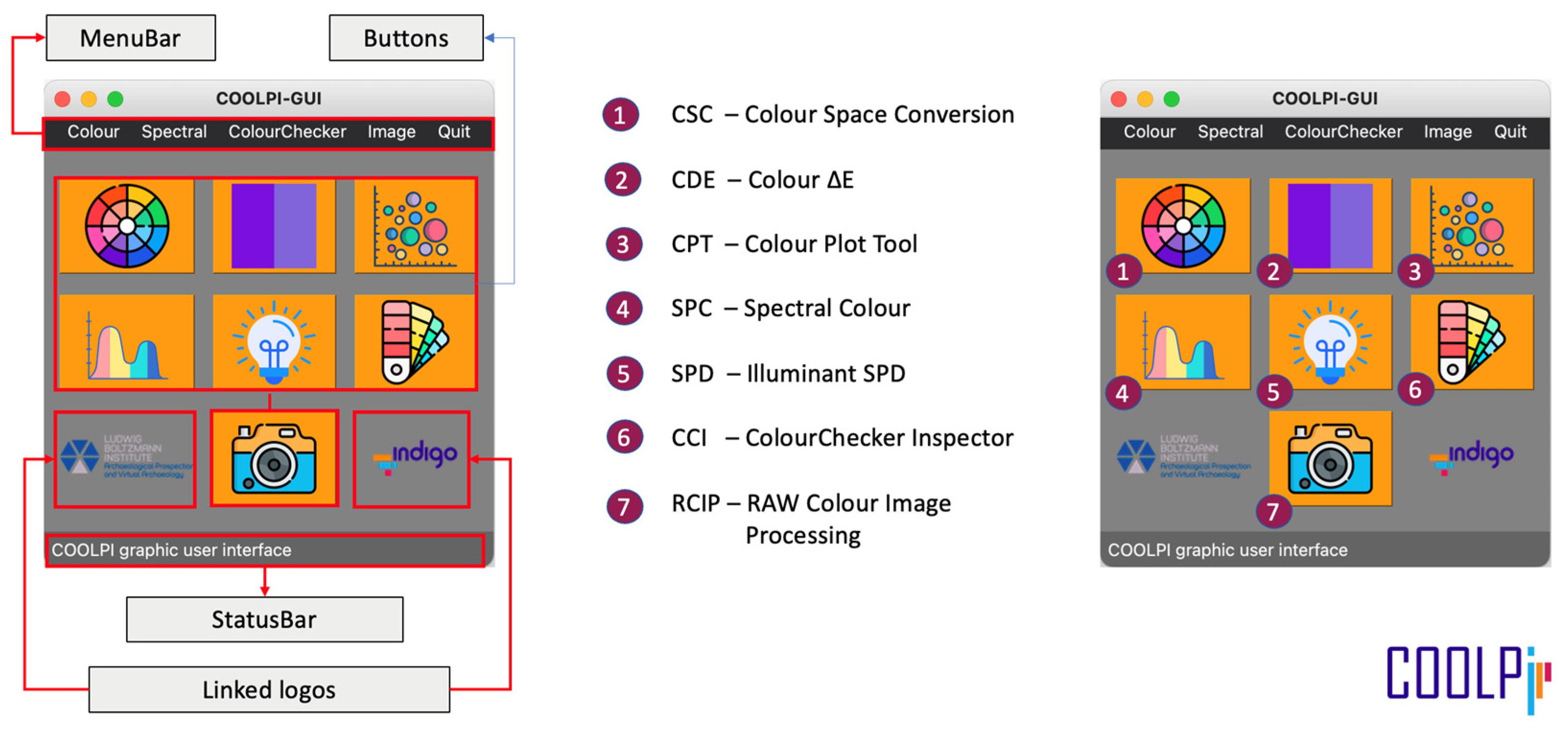
2.10. COOLPI
3. Results and Discussion
3.1. White Point Preservation Assessment
3.2. Linear Regression Model Comparison
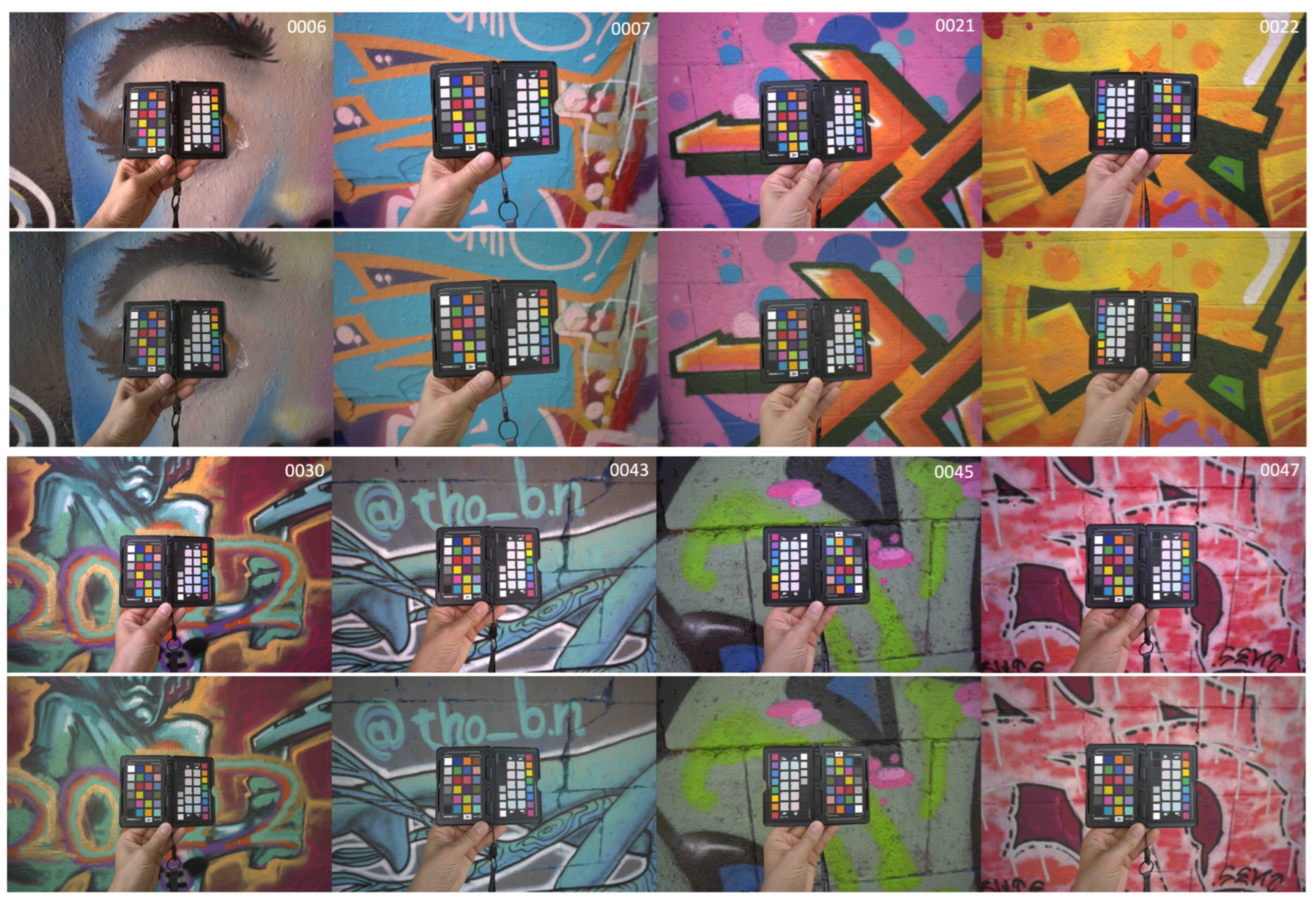
4. Practical Application in a Graffiti Scenario
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boochs, F.; Bentkowska-Kafel, A.; Degrigny, C.; Karaszewski, M.; Karmacharya, A.; Kato, Z.; Picollo, M.; Sitnik, R.; Trémeau, A.; Tsiafaki, D.; et al. Colour and Space in Cultural Heritage: Key Questions in 3D Optical Documentation of Material Culture for Conservation, Study and Preservation. In Digital Heritage. Progress in Cultural Heritage: Documentation, Preservation, and Protection; Ioannides, M., Magnenat-Thalmann, N., Fink, E., Žarnić, R., Yen, A.-Y., Quak, E., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 11–24. [Google Scholar]
- Korytkowski, P.; Olejnik-Krugly, A. Precise Capture of Colors in Cultural Heritage Digitization. Color Res. Appl. 2017, 42, 333–336. [Google Scholar] [CrossRef]
- Molada-Tebar, A.; Marqués-Mateu, Á.; Lerma, J.L. Correct Use of Color for Cultural Heritage Documentation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2-W6, 107–113. [Google Scholar] [CrossRef]
- Feitosa-Santana, C.; Gaddi, C.M.; Gomes, A.E.; Nascimento, S.M.C. Art through the Colors of Graffiti: From the Perspective of the Chromatic Structure. Sensors 2020, 20, 2531. [Google Scholar] [CrossRef] [PubMed]
- Gaiani, M.; Apollonio, F.I.; Ballabeni, A.; Remondino, F. Securing Color Fidelity in 3D Architectural Heritage Scenarios. Sensors 2017, 17, 2437. [Google Scholar] [CrossRef]
- Markiewicz, J.; Pilarska, M.; Łapiński, S.; Kaliszewska, A.; Bieńkowski, R.; Cena, A. Quality Assessment of the Use of a Medium Format Camera in the Investigation of Wall Paintings: An Image-Based Approach. Measurement 2019, 132, 224–237. [Google Scholar] [CrossRef]
- Rowlands, D.A. Color Conversion Matrices in Digital Cameras: A Tutorial. OE 2020, 59, 110801. [Google Scholar] [CrossRef]
- Punnappurath, A.; Brown, M.S. Learning Raw Image Reconstruction-Aware Deep Image Compressors. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 1013–1019. [Google Scholar] [CrossRef] [PubMed]
- Sharma, G. Color Fundamentals for Digital Imaging. In Digital Color Imaging Handbook; CRC Press: Boca Raton, FL, USA, 2003; ISBN 978-1-315-22008-6. [Google Scholar]
- CIE TC 1-85; CIE 015:2018 Colorimetry. 4th ed. International Commission on Illumination (CIE): Vienna, Austria, 2019.
- Molada-Tebar, A.; Lerma, J.L.; Marqués-Mateu, Á. Camera Characterization for Improving Color Archaeological Documentation. Color Res. Appl. 2018, 43, 47–57. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Drew, M.S. The Maximum Ignorance Assumption with Positivity; Society for Imaging Science and Technology: Springfield, VA, USA, 1996; pp. 202–205. [Google Scholar]
- Finlayson, G.D.; Drew, M.S. White-Point Preserving Color Correction. CIC 1997, 5, 258–261. [Google Scholar] [CrossRef]
- Bianco, S.; Gasparini, F.; Russo, A.; Schettini, R. A New Method for RGB to XYZ Transformation Based on Pattern Search Optimization. IEEE Trans. Consum. Electron. 2007, 53, 1020–1028. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Morovic, P.M. Metamer Constrained Color Correction. J. Imaging Sci. Technol. 2000, 44, 295–300. [Google Scholar] [CrossRef]
- Funt, B.; Ghaffari, R.; Bastani, B. Optimal Linear RGB-to-XYZ Mapping for Color Display Calibration. Available online: https://summit.sfu.ca/item/18268 (accessed on 2 November 2023).
- Hubel, P.M.; Holm, J.; Finlayson, G.D.; Drew, M.S. Matrix Calculations for Digital Photography. Color Imaging Conf. 1997, 5, 105–111. [Google Scholar] [CrossRef]
- Rao, A.R.; Mintzer, F. Color Calibration of a Colorimetric Scanner Using Non-Linear Least Squares. In Proceedings of the IS&T’s 1998 PICS Conference, Portland, OR, USA, 17–20 May 1998. [Google Scholar]
- Vazquez-Corral, J.; Connah, D.; Bertalmío, M. Perceptual Color Characterization of Cameras. Sensors 2014, 14, 23205–23229. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Scharstein, D.; Zickler, T.E. An Empirical Camera Model for Internet Color Vision. In Proceedings of the British Machine Vision Conference (BMVC), London, UK, 7–10 September 2009; Volume 1, p. 4. [Google Scholar]
- Ramanath, R.; Snyder, W.E.; Yoo, Y.; Drew, M.S. Color Image Processing Pipeline. IEEE Signal Process. Mag. 2005, 22, 34–43. [Google Scholar] [CrossRef]
- Tominaga, S.; Nishi, S.; Ohtera, R. Measurement and Estimation of Spectral Sensitivity Functions for Mobile Phone Cameras. Sensors 2021, 21, 4985. [Google Scholar] [CrossRef] [PubMed]
- Molada-Teba, A.; Verhoeven, G.J. Towards Colour-Accurate Documentation of Anonymous Expressions. Disseminate Graffiti-Scapes 2022, 86–130. [Google Scholar] [CrossRef]
- Verhoeven, G.; Wild, B.; Schlegel, J.; Wieser, M.; Pfeifer, N.; Wogrin, S.; Eysn, L.; Carloni, M.; Koschiček-Krombholz, B.; Molada-Tebar, A.; et al. Project INDIGO: Document, Disseminate & Analyse a Graffiti-Scape. In Proceedings of the 9th International Workshop 3D-ARCH" 3D Virtual Reconstruction and Visualization of Complex Architectures, Mantova, Italy, 2–4 March 2022; ISPRS: Baton Rouge, LA, USA, 2022; Volume XLVI-2/W1-2022, pp. 513–520. [Google Scholar]
- Wild, B.; Verhoeven, G.J.; Wieser, M.; Ressl, C.; Schlegel, J.; Wogrin, S.; Otepka-Schremmer, J.; Pfeifer, N. AUTOGRAF—AUTomated Orthorectification of GRAFfiti Photos. Heritage 2022, 5, 2987–3009. [Google Scholar] [CrossRef]
- Verhoeven, G.J.; Wogrin, S.; Schlegel, J.; Wieser, M.; Wild, B. Facing a Chameleon—How Project INDIGO Discovers and Records New Graffiti. Disseminate Graffiti-Scapes 2022, 63–85. [Google Scholar] [CrossRef]
- Molada-Tebar, A.; Riutort-Mayol, G.; Marqués-Mateu, Á.; Lerma, J.L. A Gaussian Process Model for Color Camera Characterization: Assessment in Outdoor Levantine Rock Art Scenes. Sensors 2019, 19, 4610. [Google Scholar] [CrossRef] [PubMed]
- Molada-Tebar, A.; Marqués-Mateu, Á.; Lerma, J.L.; Westland, S. Dominant Color Extraction with K-Means for Camera Characterization in Cultural Heritage Documentation. Remote Sens. 2020, 12, 520. [Google Scholar] [CrossRef]
- Molada-Tebar, A. COOLPI: COlour Operations Library for Processing Images 2022. Available online: https://pypi.org/project/coolpi/ (accessed on 24 February 2024).
- Molada-Tebar, A. COOLPI Documentation 2023. Available online: https://graffitiprojectindigo.github.io/COOLPI/ (accessed on 24 February 2024).
- Darrodi, M.M.; Finlayson, G.; Goodman, T.; Mackiewicz, M. Reference Data Set for Camera Spectral Sensitivity Estimation. J. Opt. Soc. Am. A JOSAA 2015, 32, 381–391. [Google Scholar] [CrossRef]
- ISO 17321-1:2012. Available online: https://www.iso.org/standard/56537.html (accessed on 2 November 2023).
- Calibrite. Available online: https://calibrite.com/us/ (accessed on 2 November 2023).
- Spyder. Available online: https://www.datacolor.com/spyder/ (accessed on 2 November 2023).
- X-Rite Color Management, Measurement, Solutions, and Software. Available online: https://www.xrite.com/en (accessed on 2 November 2023).
- Color Viewing Light PRO (EN). Available online: https://www.just-normlicht.com/en/articlelist.html?id=36&name=Color-Viewing-Light-PRO (accessed on 2 November 2023).
- Bianco, S.; Schettini, R.; Vanneschi, L. Empirical Modeling for Colorimetric Characterization of Digital Cameras. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009; pp. 3469–3472. [Google Scholar]
- Cheung, V.; Westland, S.; Connah, D.; Ripamonti, C. A Comparative Study of the Characterisation of Colour Cameras by Means of Neural Networks and Polynomial Transforms. Color. Technol. 2004, 120, 19–25. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Mackiewicz, M.; Hurlbert, A. Color Correction Using Root-Polynomial Regression. IEEE Trans. Image Process. 2015, 24, 1460–1470. [Google Scholar] [CrossRef]
- Hong, G.; Luo, M.R.; Rhodes, P.A. A Study of Digital Camera Colorimetric Characterization Based on Polynomial Modeling. Color Res. Appl. 2001, 26, 76–84. [Google Scholar] [CrossRef]
- Pointer, M.R.; Attridge, G.G.; Jacobson, R.E. Practical Camera Characterization for Colour Measurement. Imaging Sci. J. 2001, 49, 63–80. [Google Scholar] [CrossRef]
- Scikit-Learn. Linear Models. Available online: https://scikit-learn/stable/modules/linear_model.html (accessed on 3 November 2023).
- Fan, Y.; Li, J.; Guo, Y.; Xie, L.; Zhang, G. Digital Image Colorimetry on Smartphone for Chemical Analysis: A Review. Measurement 2021, 171, 108829. [Google Scholar] [CrossRef]
- Luo, M.R.; Cui, G.; Rigg, B. The Development of the CIE 2000 Colour-Difference Formula: CIEDE2000. Color Res. Appl. 2001, 26, 340–350. [Google Scholar] [CrossRef]
- Paravina, R.D.; Aleksić, A.; Tango, R.N.; García-Beltrán, A.; Johnston, W.M.; Ghinea, R.I. Harmonization of Color Measurements in Dentistry. Measurement 2021, 169, 108504. [Google Scholar] [CrossRef]
- Nguyen, C.-N.; Vo, V.-T.; Nguyen, L.-H.-N.; Thai Nhan, H.; Nguyen, C.-N. In Situ Measurement of Fish Color Based on Machine Vision: A Case Study of Measuring a Clownfish’s Color. Measurement 2022, 197, 111299. [Google Scholar] [CrossRef]
- Sharma, G.; Wu, W.; Dalal, E.N. The CIEDE2000 Color-Difference Formula: Implementation Notes, Supplementary Test Data, and Mathematical Observations. Color Res. Appl. 2005, 30, 21–30. [Google Scholar] [CrossRef]
- Melgosa, M.; Alman, D.H.; Grosman, M.; Gómez-Robledo, L.; Trémeau, A.; Cui, G.; García, P.A.; Vázquez, D.; Li, C.; Luo, M.R. Practical Demonstration of the CIEDE2000 Corrections to CIELAB Using a Small Set of Sample Pairs. Color Res. Appl. 2013, 38, 429–436. [Google Scholar] [CrossRef]
- Vrhel, M.J.; Trussell, H.J. Color Correction Using Principal Components. Color Res. Appl. 1992, 17, 328–338. [Google Scholar] [CrossRef]
- Song, T.; Luo, R. Testing Color-Difference Formulae on Complex Images Using a CRT Monitor. In Proceedings of the Color Science and Engineering Systems, Technologies, Applications, Scottsdale, AZ, USA, 1 January 2000; Volume 2000, pp. 44–48. [Google Scholar]
- Van Dormolen, H. Metamorfoze Preservation Imaging Guidelines. Archiving 2008, 5, 162–165. [Google Scholar] [CrossRef]
- Paravina, R.D.; Pérez, M.M.; Ghinea, R. Acceptability and Perceptibility Thresholds in Dentistry: A Comprehensive Review of Clinical and Research Applications. J. Esthet. Restor. Dent. 2019, 31, 103–112. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.-K.; Powers, J.M. Comparison of CIE Lab, CIEDE 2000, and DIN 99 Color Differences between Various Shades of Resin Composites. Int. J. Prosthodont. 2005, 18, 150. [Google Scholar] [PubMed]
- Westland, S.; Ripamondi, C.; Cheung, V. Characterisation of Cameras. In Computational Colour Science using MATLAB®; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; pp. 143–157. ISBN 978-0-470-71089-0. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Illuminant | CCT (K) | Xn | Yn | Zn | |
|---|---|---|---|---|---|
| Laboratory | JN-D65 | 6658 | 96.49 | 100 | 113.77 |
| JN-A | 2681 | 112.11 | 100 | 30.53 | |
| JN-F | 3872 | 99.70 | 100 | 56.42 | |
| JND50 | 4963 | 99.13 | 100 | 87.52 | |
| In situ | IN-29 | 3066 | 106.69 | 100 | 38.75 |
| IN-30 | 5027 | 93.60 | 100 | 76.96 | |
| OUT-38 | 5557 | 96.41 | 100 | 94.72 | |
| Camera | Dataset | Laboratory | In Situ | Total | |||
|---|---|---|---|---|---|---|---|
| Photos | Patches | Photos | Patches | Photos | Patches | ||
| Nikon D5600 | ND-ODS | 16 | 768 | 12 | 576 | 28 | 1344 |
| ND-WPPDS | 16 | 768 | 12 | 576 | 28 | 1344 | |
| Nikon Z 7II | NZ-WPPDS | - | - | 12 | 576 | 12 | 576 |
| Reference Target | Training Patches | Test Patches | RMSE | R2 | Avg. Res. X | Avg. Res. Y | Avg. Res. Z | ||
|---|---|---|---|---|---|---|---|---|---|
| CCDSG | 76 | 20 | 0.046 | 0.952 | 0.020 | 0.023 | 0.020 | 6.571 | 4.143 |
| CCC | 19 | 5 | 0.027 | 0.766 | −0.002 | −0.004 | 0.009 | 4.037 | 3.198 |
| XRCCPP | 19 | 5 | 0.010 | 0.968 | −0.003 | −0.004 | −0.005 | 2.254 | 1.642 |
| SCK100 | 38 | 10 | 0.087 | 0.908 | −0.020 | −0.018 | −0.011 | 6.678 | 4.540 |
| All | 153 | 39 | 0.067 | 0.909 | 0.012 | 0.012 | 0.021 | 6.562 | 4.808 |
| Illuminant | Dataset | Training Patches | Test Patches | RMSE | R2 | Avg. Res. X | Avg. Res. Y | Avg. Res. Z | ||
|---|---|---|---|---|---|---|---|---|---|---|
| JN-D65 | ND-ODS | 19 | 5 | 0.009 | 0.968 | −0.002 | −0.003 | −0.005 | 2.103 | 1.523 |
| NP-WPPDS | 19 | 5 | 0.010 | 0.968 | −0.003 | −0.004 | −0.005 | 2.254 | 1.642 | |
| JN-A | ND-ODS | 19 | 5 | 0.008 | 0.967 | −0.003 | −0.004 | −0.005 | 2.511 | 1.722 |
| NP-WPPDS | 19 | 5 | 0.011 | 0.967 | −0.006 | −0.005 | −0.021 | 3.518 | 1.854 | |
| JN-F | ND-ODS | 19 | 5 | 0.008 | 0.965 | −0.004 | −0.004 | −0.006 | 2.570 | 1.768 |
| NP-WPPDS | 19 | 5 | 0.012 | 0.965 | −0.006 | −0.005 | −0.014 | 2.917 | 2.000 | |
| JN-D50 | ND-ODS | 19 | 5 | 0.009 | 0.964 | −0.004 | −0.004 | −0.006 | 2.419 | 1.730 |
| NP-WPPDS | 19 | 5 | 0.011 | 0.964 | −0.005 | −0.005 | −0.009 | 2.621 | 1.897 | |
| IN-29 | ND-ODS | 19 | 5 | 0.006 | 0.971 | −0.001 | 0.000 | −0.008 | 2.273 | 1.264 |
| NP-WPPDS | 19 | 5 | 0.013 | 0.971 | −0.003 | 0.000 | −0.027 | 3.499 | 1.394 | |
| IN-30 | ND-ODS | 19 | 5 | 0.009 | 0.964 | 0.001 | 0.001 | −0.008 | 2.189 | 1.255 |
| NP-WPPDS | 19 | 5 | 0.014 | 0.964 | 0.001 | 0.001 | −0.013 | 2.552 | 1.272 | |
| OUT-38 | ND-ODS | 19 | 5 | 0.010 | 0.967 | 0.002 | 0.002 | −0.005 | 2.361 | 1.529 |
| NP-WPPDS | 19 | 5 | 0.013 | 0.967 | 0.002 | 0.002 | −0.006 | 2.594 | 1.584 | |
| Laboratory | ND-ODS | 76 | 20 | 0.040 | 0.955 | −0.005 | −0.003 | −0.001 | 6.746 | 4.201 |
| NP-WPPDS | 76 | 20 | 0.037 | 0.976 | −0.015 | −0.014 | −0.027 | 6.897 | 3.706 | |
| In situ | ND-ODS | 57 | 15 | 0.042 | 0.904 | −0.016 | −0.009 | −0.032 | 6.789 | 4.505 |
| NP-WPPDS | 57 | 15 | 0.019 | 0.989 | 0.009 | 0.014 | 0.011 | 3.266 | 1.856 | |
| All | ND-ODS | 134 | 34 | 0.048 | 0.927 | −0.012 | −0.012 | −0.019 | 5.925 | 4.157 |
| NP-WPPDS | 134 | 34 | 0.038 | 0.971 | −0.005 | −0.003 | −0.026 | 5.896 | 3.279 |
| Dataset | JN-D65 | JN-A | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ND-ODS | 3.5485 | 0.1360 | 0.4589 | 4.1801 | 0.4118 | 0.8701 | |||
| 1.4982 | 1.7705 | −0.3188 | 1.5919 | 2.5406 | −0.1602 | ||||
| 0.5422 | −0.8034 | 3.6980 | 0.1213 | −0.5481 | 4.1887 | ||||
| ND-WPPDS | 0.6953 | 0.0594 | 0.1624 | 0.7623 | 0.0888 | 0.0709 | |||
| 0.2819 | 0.7426 | −0.1084 | 0.3249 | 0.6133 | −0.0146 | ||||
| 0.0918 | −0.3032 | 1.1309 | 0.0830 | −0.4434 | 1.2797 | ||||
| Dataset | JN-F | JN-D50 | |||||||
| ND-ODS | 4.7730 | 0.1895 | 1.1060 | 4.1220 | 0.1895 | 0.5299 | |||
| 2.0052 | 2.3411 | −0.0003 | 1.6664 | 2.1571 | −0.3801 | ||||
| 0.2961 | −0.6924 | 5.0922 | 0.4070 | −0.8313 | 4.2663 | ||||
| ND-WPPDS | 0.7297 | 0.0500 | 0.1404 | 0.7355 | 0.0641 | 0.1255 | |||
| 0.3046 | 0.6142 | 0.0000 | 0.2937 | 0.7212 | −0.0889 | ||||
| 0.0819 | −0.3309 | 1.1703 | 0.0839 | −0.3249 | 1.1664 | ||||
| Dataset | IN-29 | IN-30 | OUT-38 | ||||||
| ND-ODS | 2.8148 | 0.4314 | 0.1301 | 3.4889 | 0.4330 | 0.1308 | 4.5453 | 0.4733 | 0.3683 |
| 1.0775 | 1.8053 | −0.4953 | 1.3130 | 2.1511 | −0.6684 | 1.7388 | 2.7641 | −0.7463 | |
| 0.0871 | −0.3682 | 2.8301 | 0.2026 | −0.6176 | 3.6019 | 0.3684 | −0.9187 | 4.9654 | |
| ND-WPPDS | 0.8150 | 0.1728 | 0.0223 | 0.7815 | 0.2029 | 0.0391 | 0.7478 | 0.1628 | 0.0918 |
| 0.3323 | 0.7703 | −0.0904 | 0.2743 | 0.9397 | −0.1861 | 0.2744 | 0.9119 | −0.1783 | |
| 0.0708 | −0.4137 | 1.3605 | 0.0564 | −0.3593 | 1.3358 | 0.0632 | −0.3293 | 1.2888 | |
| Dataset | Laboratory | In situ | All | ||||||
| ND-ODS | 4.4103 | 0.3033 | 0.0664 | 2.9184 | 0.4311 | 0.8140 | 3.6604 | 0.4111 | 0.3825 |
| 1.9251 | 2.2850 | −0.8959 | 0.9099 | 2.0879 | −0.0174 | 1.4064 | 2.2066 | −0.4543 | |
| 0.3476 | −0.4924 | 3.62015 | 0.1157 | −0.7326 | 4.1765 | 0.1273 | −0.5518 | 3.9372 | |
| ND-WPPDS | 0.7397 | 0.0774 | 0.1066 | 0.7877 | 0.1662 | 0.0511 | 0.7410 | 0.1079 | 0.1084 |
| 0.3196 | 0.6702 | −0.0671 | 0.3140 | 0.8335 | −0.1426 | 0.2938 | 0.7331 | −0.0683 | |
| 0.0874 | −0.3511 | 1.1856 | 0.0737 | −0.3717 | 1.3119 | 0.0612 | −0.3385 | 1.2446 | |
| Illuminant | Training Patches | Test Patches | RMSE | R2 | Avg. Res. X | Avg. Res. Y | Avg. Res. Z | ||
|---|---|---|---|---|---|---|---|---|---|
| JN-D65 | 153 | 39 | 0.067 | 0.909 | 0.012 | 0.012 | 0.021 | 6.562 | 4.808 |
| JN-A | 153 | 39 | 0.056 | 0.943 | 0.009 | 0.006 | 0.040 | 8.342 | 4.796 |
| JN-F | 153 | 39 | 0.072 | 0.903 | 0.013 | 0.010 | 0.036 | 7.476 | 5.053 |
| JN-D50 | 153 | 39 | 0.059 | 0.932 | 0.011 | 0.011 | 0.024 | 6.345 | 4.415 |
| IN-29 | 153 | 39 | 0.054 | 0.946 | 0.007 | 0.008 | 0.022 | 4.980 | 2.844 |
| IN-30 | 153 | 39 | 0.013 | 0.997 | −0.001 | 0.000 | −0.001 | 2.984 | 1.576 |
| OUT-38 | 153 | 39 | 0.019 | 0.993 | 0.005 | 0.006 | 0.007 | 4.140 | 2.288 |
| Laboratory | 614 | 154 | 0.058 | 0.921 | 0.012 | 0.014 | 0.027 | 8.245 | 5.067 |
| In situ | 460 | 116 | 0.027 | 0.985 | 0.007 | 0.007 | 0.011 | 5.022 | 2.810 |
| All | 1075 | 269 | 0.043 | 0.966 | 0.015 | 0.017 | 0.017 | 6.071 | 3.698 |
| JN-D65 | JN-A | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.7136 | 0.3110 | −0.0204 | 0.7712 | 0.3471 | −0.1079 | |||
| 0.2745 | 1.0495 | −0.3168 | 0.3110 | 0.8950 | −0.1935 | |||
| 0.0781 | −0.2069 | 1.1252 | 0.0825 | −0.3772 | 1.2917 | |||
| JN-F | JN-D50 | |||||||
| 0.7470 | 0.2725 | −0.0108 | 0.7463 | 0.2937 | −0.0424 | |||
| 0.2956 | 0.8833 | −0.1671 | 0.2872 | 0.9863 | −0.2718 | |||
| 0.0733 | −0.2568 | 1.1813 | 0.0824 | −0.2562 | 1.1665 | |||
| IN-29 | IN-30 | OUT-38 | ||||||
| 0.7529 | 0.2819 | −0.0277 | 0.7474 | 0.2329 | 0.0283 | 0.7454 | 0.2337 | 0.0398 |
| 0.3129 | 0.8172 | −0.1206 | 0.2758 | 0.9174 | −0.1790 | 0.2939 | 0.9459 | −0.2171 |
| 0.1110 | −0.4290 | 1.3255 | 0.0780 | −0.3460 | 1.2788 | 0.0996 | −0.3195 | 1.2443 |
| Laboratory | In situ | All | ||||||
| 0.7616 | 0.2451 | 0.0008 | 0.7406 | 0.2569 | 0.0142 | 0.7524 | 0.2343 | 0.0180 |
| 0.3142 | 0.8767 | −0.1829 | 0.2916 | 0.8828 | −0.1597 | 0.3040 | 0.8636 | −0.1607 |
| 0.1025 | −0.3399 | 1.2343 | 0.0923 | −0.3644 | 1.2854 | 0.0967 | −0.3527 | 1.2582 |
| Model | Training Patches | Test Patches | RMSE | R2 | Avg. Res. X | Avg. Res. Y | Avg. Res. Z | ||
|---|---|---|---|---|---|---|---|---|---|
| OLS | 1075 | 269 | 0.043 | 0.966 | 0.015 | 0.017 | 0.017 | 6.071 | 3.698 |
| MTLCV | 1075 | 269 | 0.043 | 0.966 | 0.016 | 0.017 | 0.018 | 6.216 | 3.771 |
| BR | 1075 | 269 | 0.043 | 0.966 | 0.015 | 0.017 | 0.017 | 6.069 | 3.698 |
| HR | 1075 | 269 | 0.043 | 0.967 | 0.013 | 0.015 | 0.014 | 5.991 | 3.657 |
| TSR | 1075 | 269 | 0.044 | 0.964 | −0.002 | 0.001 | −0.013 | 6.136 | 3.701 |
| OLS | MTLCV | |||||||
|---|---|---|---|---|---|---|---|---|
| 0.7524 | 0.2343 | 0.0180 | 0.7449 | 0.2411 | 0.0188 | |||
| 0.3040 | 0.8636 | −0.1607 | 0.3187 | 0.8249 | −0.1368 | |||
| 0.0967 | −0.3527 | 1.2582 | 0.0807 | −0.3069 | 1.2266 | |||
| BR | HR | TSR | ||||||
| 0.7522 | 0.2345 | 0.0180 | 0.7596 | 0.2223 | 0.0282 | 0.7920 | 0.2010 | 0.0596 |
| 0.3044 | 0.8625 | −0.1600 | 0.3085 | 0.8510 | −0.1475 | 0.3377 | 0.8449 | −0.1272 |
| 0.0965 | −0.3521 | 1.2577 | 0.0877 | −0.3382 | 1.2608 | 0.1225 | −0.3924 | 1.3269 |
| Illuminant | Training Patches | Test Patches | RMSE | R2 | Avg. Res. X | Avg. Res. Y | Avg. Res. Z | ||
|---|---|---|---|---|---|---|---|---|---|
| IN-29 | 153 | 39 | 0.018 | 0.994 | 0.000 | 0.000 | 0.001 | 4.103 | 2.071 |
| IN-30 | 153 | 39 | 0.016 | 0.995 | −0.002 | −0.002 | −0.003 | 3.368 | 1.797 |
| OUT-38 | 153 | 39 | 0.030 | 0.982 | 0.008 | 0.009 | 0.008 | 4.970 | 2.759 |
| In situ | 459 | 117 | 0.027 | 0.985 | 0.007 | 0.008 | 0.007 | 4.959 | 2.911 |
| IN-29 | IN-30 | OUT-38 | ||||||
|---|---|---|---|---|---|---|---|---|
| 0.7580 | 0.2274 | 0.0119 | 0.7088 | 0.2467 | 0.0537 | 0.7243 | 0.2387 | 0.0646 |
| 0.3337 | 0.7386 | −0.0726 | 0.2764 | 0.8522 | −0.1159 | 0.3030 | 0.8829 | −0.1553 |
| 0.0620 | −0.3130 | 1.2507 | 0.0614 | −0.2798 | 1.2335 | 0.0902 | −0.2727 | 1.2178 |
| In situ | ||||||||
| 0.7237 | 0.2418 | 0.0452 | ||||||
| 0.3015 | 0.8145 | −0.1032 | ||||||
| 0.0697 | −0.2883 | 1.2330 | ||||||
| Graffito ID | Graffito ID | Graffito ID | |||
|---|---|---|---|---|---|
| 0001 | 23.497 | 0017 | 17.853 | 0034 | 18.592 |
| 0002 | 15.315 | 0018 | 6.143 | 0035 | 12.128 |
| 0003 | 18.224 | 0019 | 18.241 | 0037 | 3.700 |
| 0004 | 16.729 | 0021 | 3.074 | 0038 | 2.628 |
| 0005 | 5.513 | 0022 | 2.781 | 0039 | 3.297 |
| 0006 | 2.891 | 0023 | 2.332 | 0040 | 3.292 |
| 0007 | 3.630 | 0024 | 4.548 | 0041 | 2.980 |
| 0008 | 2.544 | 0026 | 7.701 | 0042 | 7.594 |
| 0010 | 14.004 | 0027 | 7.787 | 0043 | 2.307 |
| 0011 | 14.921 | 0028 | 9.682 | 0044 | 2.236 |
| 0012 | 19.012 | 0029 | 2.842 | 0045 | 3.444 |
| 0013 | 3.688 | 0030 | 2.563 | 0046 | 3.217 |
| 0014 | 11.019 | 0031 | 3.294 | 0047 | 3.192 |
| 0015 | 23.226 | 0032 | 3.654 | 0048 | 23.671 |
| 0016 | 20.518 | 0033 | 3.232 | 0049 | 17.991 |
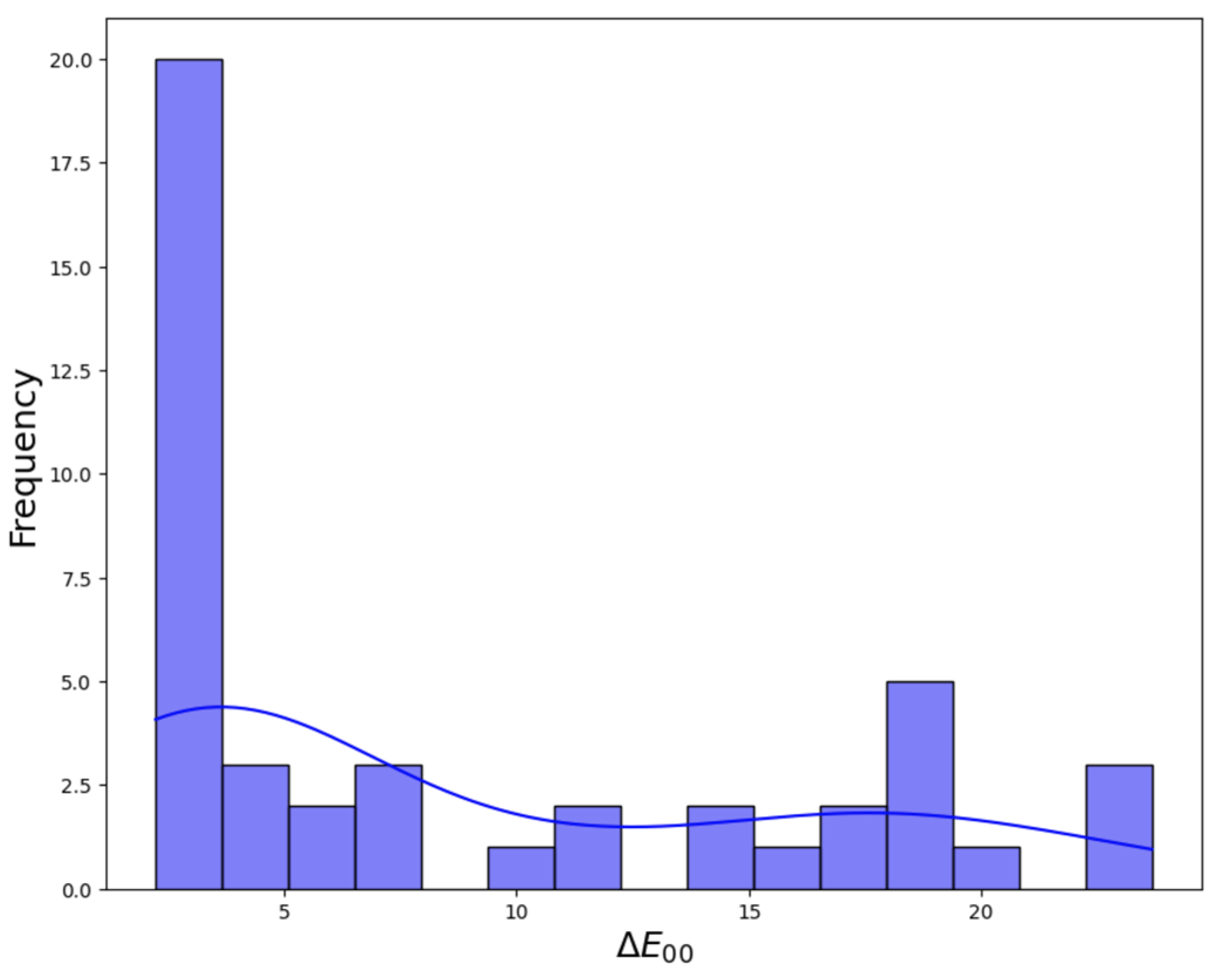
| Graffiti Photos | Percentage | ||
|---|---|---|---|
| (0, 4] | 22 | 49 | 3.037/3.133 |
| (4, 24) | 23 | 51 | 14.518/15.315 |
| Total | 45 | 100 | 8.905/4.548 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molada-Tebar, A.; Verhoeven, G.J.; Hernández-López, D.; González-Aguilera, D. Practical RGB-to-XYZ Color Transformation Matrix Estimation under Different Lighting Conditions for Graffiti Documentation. Sensors 2024, 24, 1743. https://doi.org/10.3390/s24061743
Molada-Tebar A, Verhoeven GJ, Hernández-López D, González-Aguilera D. Practical RGB-to-XYZ Color Transformation Matrix Estimation under Different Lighting Conditions for Graffiti Documentation. Sensors. 2024; 24(6):1743. https://doi.org/10.3390/s24061743
Chicago/Turabian StyleMolada-Tebar, Adolfo, Geert J. Verhoeven, David Hernández-López, and Diego González-Aguilera. 2024. "Practical RGB-to-XYZ Color Transformation Matrix Estimation under Different Lighting Conditions for Graffiti Documentation" Sensors 24, no. 6: 1743. https://doi.org/10.3390/s24061743
APA StyleMolada-Tebar, A., Verhoeven, G. J., Hernández-López, D., & González-Aguilera, D. (2024). Practical RGB-to-XYZ Color Transformation Matrix Estimation under Different Lighting Conditions for Graffiti Documentation. Sensors, 24(6), 1743. https://doi.org/10.3390/s24061743