





Risks of Drone Use in Light of Literature Studies



Abstract
1. Introduction
- Civilian group—refers to civilian applications of drones and includes drones used in such areas as photography, construction, mining, delivery, agriculture, logistics, disaster management, and surveillance.
- Environment group—concerned with the use of drones for ecosystem monitoring. This includes drones used primarily in the areas of soil monitoring, crop monitoring, water, underwater, mountain inspection, and air quality monitoring.
- Defence group—concerned with the use of UAVs in military applications. This includes drones used in the area of combat aircraft, spying, bomb dropping, missile launching, surveillance at the border, and warzone medical supplies.
- The results of the bibliometric analysis show contemporary publication trends related to the topic of risk in the application of drones.
- The proposed thematic classification for research areas related to drone application risk.
- Arrangement of publications related to drone application risks according to the proposed research classification.
- Identification of current research gaps in publications related to drone application risks.
2. Methodology
2.1. Stages of the Research Procedure
2.2. PRISMA
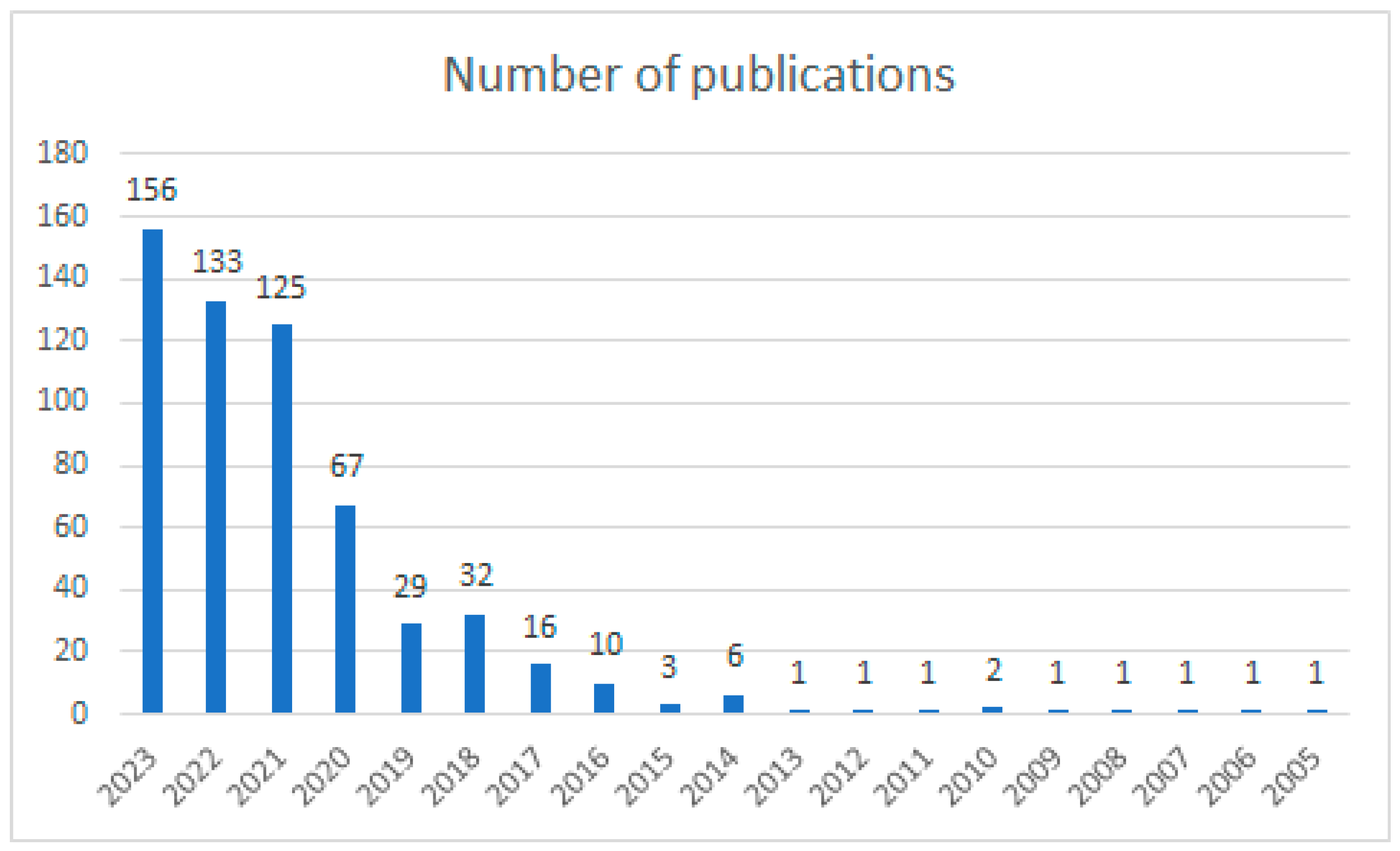
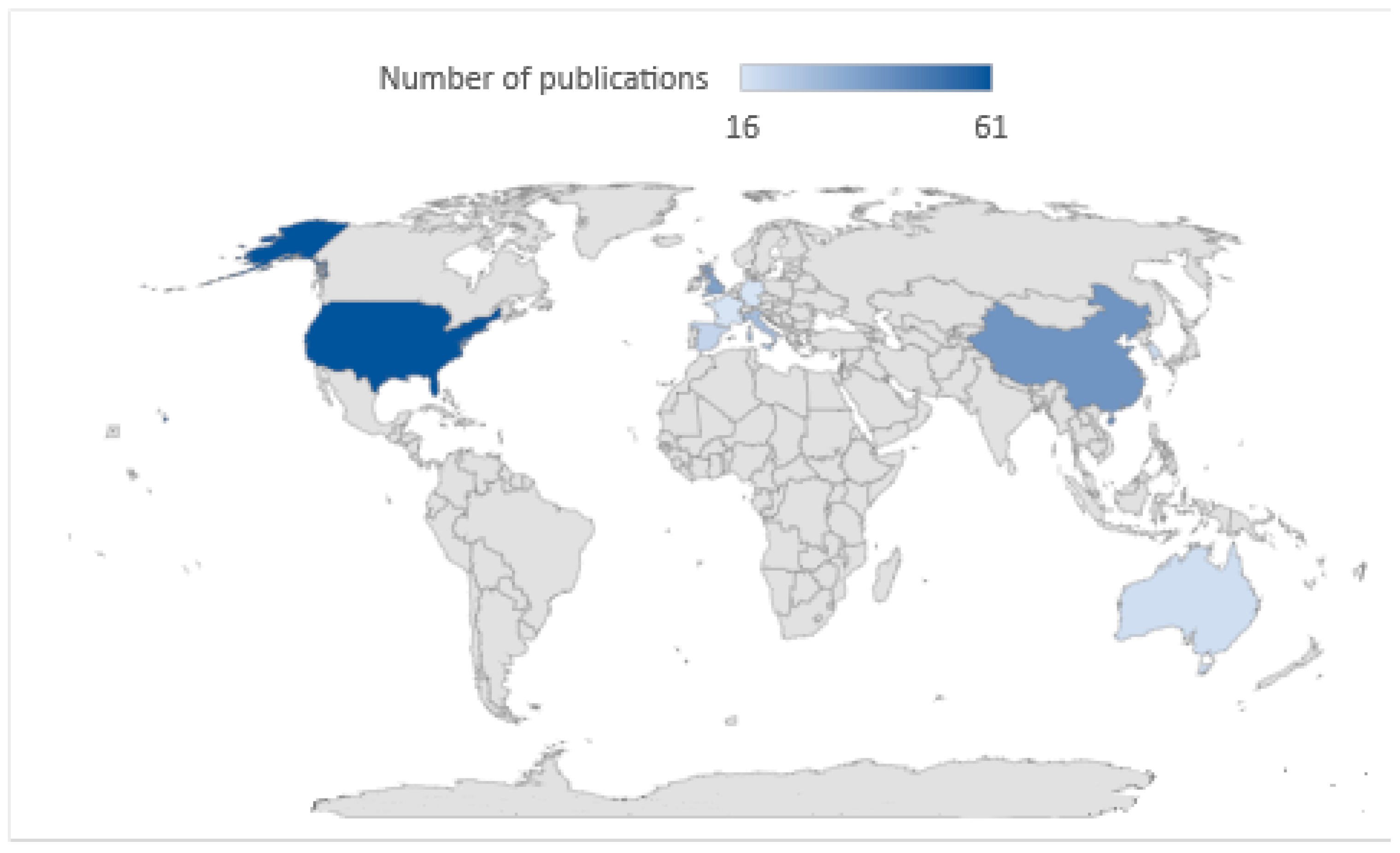
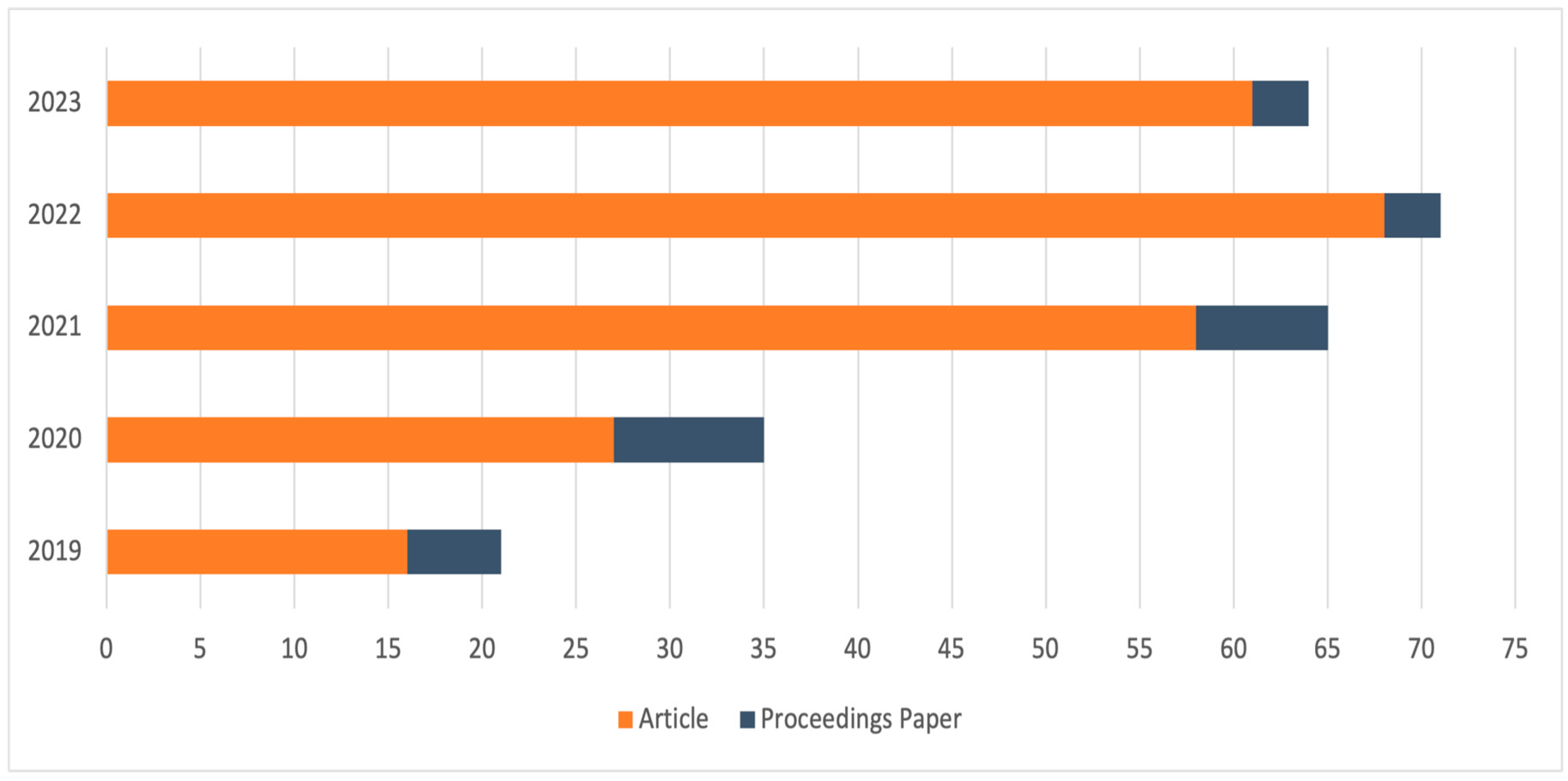
3. Bibliometric Analysis
4. Results
4.1. Monitoring—102 Documents
- The ability to conduct territorial surveys over a larger area in a shorter time.
- Lower costs of conducted surveys in the field.
- Increased safety of performed surveys in dangerous and difficult-to-access areas.
- The ability to obtain real-time images and immediately analyse them for decision-making.
4.2. Other Applications of Drones—48 Documents
4.2.1. Rapid Response Operations
- Detection of chemical substances [155];
- Disaster victim identification [150];
- Restoring radio communication [149];
- Support for police patrols [161];
- Responding to the gestures of a person participating in a response mission [162];
- Surveillance in areas with diverse radiation levels [163];
- Detecting anomalies in pollution [113].
4.2.2. Transport
4.2.3. Other Applications
4.3. Technology Development Related to the Operation of Drones—43 Documents
4.4. Drones as a Source of Risk—16 Documents
4.5. Cybersecurity—12 Documents
4.6. Preventive Activities against the Risks Associated with Drones—32 Documents
4.7. Opinion Survey—11 Documents
4.8. Other—7 Documents
- Adapting drones for unrestricted and safe indoor use [287];
- The safety of racing drones [288];
- The use of ultrasonic sensors in autonomous devices [289];
- The dangers associated with filming VLOS flights, which arise from the need for the pilot to manage variable supervision at two levels, i.e., filming and flying [290];
- Aspects related to the operation and use of drones [292].
5. Discussion
5.1. Analysis of the Obtained Results
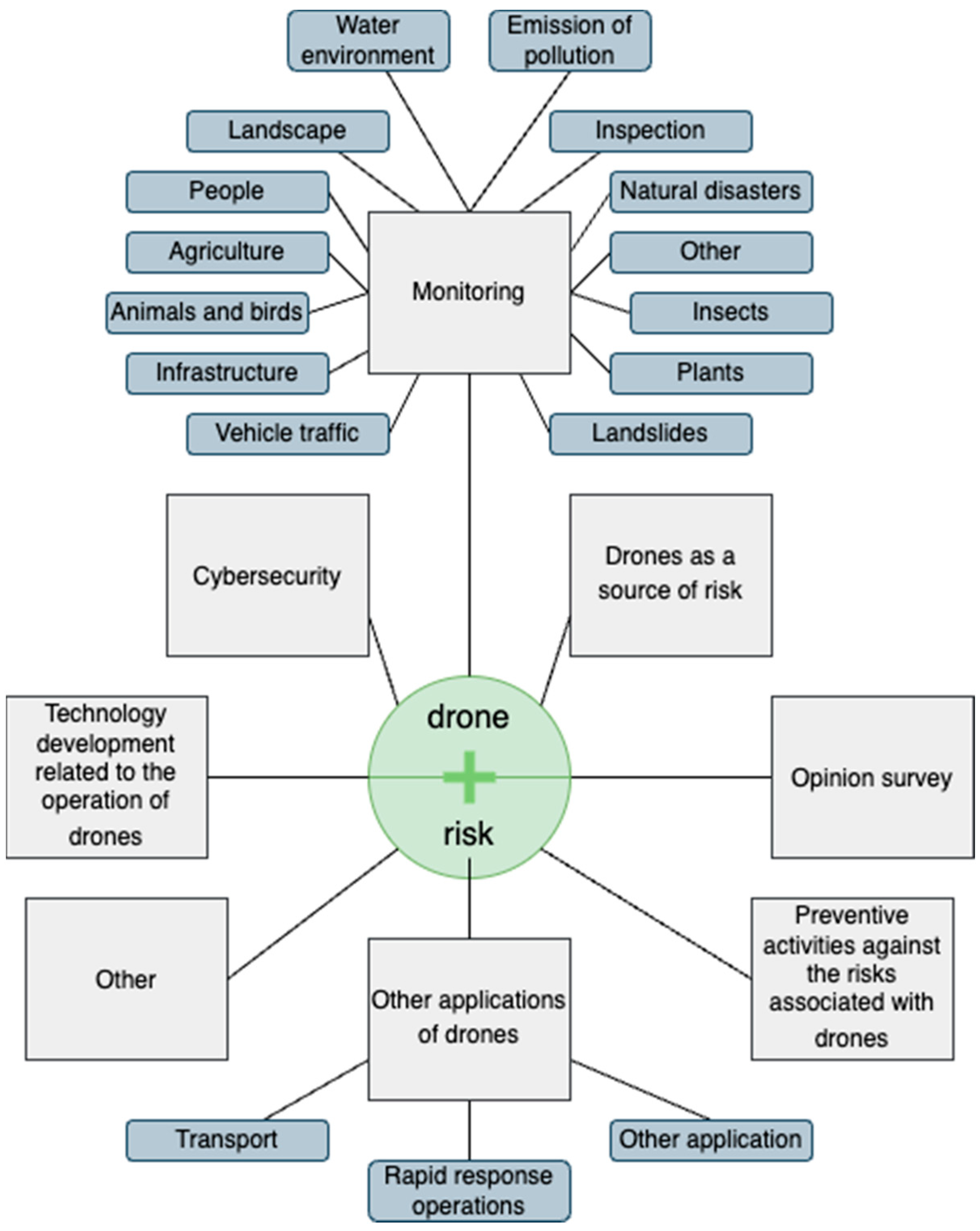
- Monitoring (Section 4.1) is the main area of research related to the risks of using UAV systems. Due to the size of this group, we divided it, according to the most popular areas of drone application, into 14 subcategories.
- Other applications (Section 4.2), where two leading trends can already be distinguished, regarding using drones in transportation and as support in rapid response organisations. This group has the potential for further development as the functionality offered by modern UAV systems expands.
5.2. Identification of the Research Gap
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hodgkinson, D.; Johnston, R. Aviation Law and Drones: Unmanned Aircraft and the Future of Aviation; Routledge: Oxfordshire, UK; New York, NY, USA, 2018. [Google Scholar]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. Drone-Aided Routing: A Literature Review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone Delivery: Factors Affecting the Public’s Attitude and Intention to Adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Preprints 2018, 2018110601. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, Applications, and Design Challenges of Drones: A Review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research Avenues for Drone-Based Models in Logistics: A Classification and Review. Expert. Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Garg, V.; Niranjan, S.; Prybutok, V.; Pohlen, T.; Gligor, D. Drones in Last-Mile Delivery: A Systematic Review on Efficiency, Accessibility, and Sustainability. Transp. Res. D Transp. Environ. 2023, 123, 103831. [Google Scholar] [CrossRef]
- Eskandaripour, H.; Boldsaikhan, E. Last-Mile Drone Delivery: Past, Present, and Future. Drones 2023, 7, 77. [Google Scholar] [CrossRef]
- Gohari, A.; Ahmad, A.B.; Rahim, R.B.A.; Supa’at, A.S.M.; Abd Razak, S.; Gismalla, M.S.M. Involvement of Surveillance Drones in Smart Cities: A Systematic Review. IEEE Access 2022, 10, 56611–56628. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Haleem, H.; Lavagetto, F.; Sciarrone, A. A Systematic Review of Drone Based Road Traffic Monitoring System. IEEE Access 2022, 10, 101537–101555. [Google Scholar] [CrossRef]
- Gohari, A.; Ahmad, A.B.; Rahim, R.B.A.; Elamin, N.I.M.; Gismalla, M.S.M.; Oluwatosin, O.O.; Hasan, R.; Latip, A.S.A.; Lawal, A. Drones for Road Accident Management: A Systematic Review. IEEE Access 2023, 11, 109247–109256. [Google Scholar] [CrossRef]
- Raoult, V.; Colefax, A.P.; Allan, B.M.; Cagnazzi, D.; Castelblanco-Martínez, N.; Ierodiaconou, D.; Johnston, D.W.; Landeo-Yauri, S.; Lyons, M.; Pirotta, V.; et al. Operational Protocols for the Use of Drones in Marine Animal Research. Drones 2020, 4, 64. [Google Scholar] [CrossRef]
- Butcher, P.; Colefax, A.; Gorkin, R.; Kajiura, S.; López, N.; Mourier, J.; Purcell, C.; Skomal, G.; Tucker, J.; Walsh, A.; et al. The Drone Revolution of Shark Science: A Review. Drones 2021, 5, 8. [Google Scholar] [CrossRef]
- Poljak, M.; Šterbenc, A. Use of Drones in Clinical Microbiology and Infectious Diseases: Current Status, Challenges and Barriers. Clin. Microbiol. Infect. 2020, 26, 425–430. [Google Scholar] [CrossRef] [PubMed]
- Hiebert, B.; Nouvet, E.; Jeyabalan, V.; Donelle, L. The Application of Drones in Healthcare and Health-Related Services in North America: A Scoping Review. Drones 2020, 4, 30. [Google Scholar] [CrossRef]
- Rosser, J.C.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef] [PubMed]
- Sevilla-Sevilla, C.; Mendieta-Aragón, A.; Ruiz-Gómez, L.M. Drones in Hospitality and Tourism: A Literature Review and Research Agenda. Tour. Rev. 2023, 79, 378–391. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in Agriculture: A Review and Bibliometric Analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Zailani, M.A.H.; Sabudin, R.Z.A.R.; Rahman, R.A.; Saiboon, I.M.; Ismail, A.; Mahdy, Z.A. Drone for Medical Products Transportation in Maternal Healthcare. Medicine 2020, 99, e21967. [Google Scholar] [CrossRef]
- Agapiou, A. Drones in Construction: An International Review of the Legal and Regulatory Landscape. Proc. Inst. Civ. Eng.-Manag. Procure. Law 2021, 174, 118–125. [Google Scholar] [CrossRef]
- Nwaogu, J.M.; Yang, Y.; Chan, A.P.C.; Chi, H. Application of Drones in the Architecture, Engineering, and Construction (AEC) Industry. Autom. Constr. 2023, 150, 104827. [Google Scholar] [CrossRef]
- Schad, L.; Fischer, J. Opportunities and Risks in the Use of Drones for Studying Animal Behaviour. Methods Ecol. Evol. 2023, 14, 1864–1872. [Google Scholar] [CrossRef]
- Mohd Daud, S.M.S.; Mohd Yusof, M.Y.P.; Heo, C.C.; Khoo, L.S.; Chainchel Singh, M.K.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef] [PubMed]
- Zitar, R.A.; Mohsen, A.; Seghrouchni, A.E.; Barbaresco, F.; Al-Dmour, N.A. Intensive Review of Drones Detection and Tracking: Linear Kalman Filter versus Nonlinear Regression, an Analysis Case. Arch. Comput. Methods Eng. 2023, 30, 2811–2830. [Google Scholar] [CrossRef]
- Khan, M.A.; Menouar, H.; Eldeeb, A.; Abu-Dayya, A.; Salim, F.D. On the Detection of Unauthorized Drones—Techniques and Future Perspectives: A Review. IEEE Sens. J. 2022, 22, 11439–11455. [Google Scholar] [CrossRef]
- Sabino, H.; Almeida, R.V.S.; de Moraes, L.B.; da Silva, W.P.; Guerra, R.; Malcher, C.; Passos, D.; Passos, F.G.O. A Systematic Literature Review on the Main Factors for Public Acceptance of Drones. Technol. Soc. 2022, 71, 102097. [Google Scholar] [CrossRef]
- Wang, N.; Mutzner, N.; Blanchet, K. Societal Acceptance of Urban Drones: A Scoping Literature Review. Technol. Soc. 2023, 75, 102377. [Google Scholar] [CrossRef]
- Liang, Y.-J.; Luo, Z.-X. A Survey of Truck–Drone Routing Problem: Literature Review and Research Prospects. J. Oper. Res. Soc. China 2022, 10, 343–377. [Google Scholar] [CrossRef]
- Pasha, J.; Elmi, Z.; Purkayastha, S.; Fathollahi-Fard, A.M.; Ge, Y.-E.; Lau, Y.-Y.; Dulebenets, M.A. The Drone Scheduling Problem: A Systematic State-of-the-Art Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14224–14247. [Google Scholar] [CrossRef]
- Raivi, A.M.; Huda, S.M.A.; Alam, M.M.; Moh, S. Drone Routing for Drone-Based Delivery Systems: A Review of Trajectory Planning, Charging, and Security. Sensors 2023, 23, 1463. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones 2023, 7, 169. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned Aerial Vehicles/Drones in Vehicle Routing Problems: A Literature Review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Kucharczyk, M.; Hugenholtz, C.H. Remote Sensing of Natural Hazard-Related Disasters with Small Drones: Global Trends, Biases, and Research Opportunities. Remote Sens. Environ. 2021, 264, 112577. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. Int. J. Surg. 2010, 8, 336–341. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the Drone Revolution: A Systematic Literature Review into the Current Use of Airborne Drones and Future Strategic Directions for Their Effective Control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef] [PubMed]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of Unmanned Aerial Vehicle (UAV) in Road Safety, Traffic and Highway Infrastructure Management: Recent Advances and Challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Guo, D.; Long, F.; Mateos, L.A.; Ding, H.; Xiu, Z.; Hellman, R.B.; King, A.; Chen, S.; Zhang, C.; et al. Robots under COVID-19 Pandemic: A Comprehensive Survey. IEEE Access 2021, 9, 1590–1615. [Google Scholar] [CrossRef]
- Shamsoshoara, A.; Afghah, F.; Razi, A.; Zheng, L.; Fulé, P.Z.; Blasch, E. Aerial Imagery Pile Burn Detection Using Deep Learning: The FLAME Dataset. Comput. Netw. 2021, 193, 108001. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Y.; Song, H. Counter-Unmanned Aircraft System(s) (C-UAS): State of the Art, Challenges, and Future Trends. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–29. [Google Scholar] [CrossRef]
- Shayea, I.; Ergen, M.; Hadri Azmi, M.; Aldirmaz Colak, S.; Nordin, R.; Daradkeh, Y.I. Key Challenges, Drivers and Solutions for Mobility Management in 5G Networks: A Survey. IEEE Access 2020, 8, 172534–172552. [Google Scholar] [CrossRef]
- Annis, A.; Nardi, F.; Petroselli, A.; Apollonio, C.; Arcangeletti, E.; Tauro, F.; Belli, C.; Bianconi, R.; Grimaldi, S. UAV-DEMs for Small-Scale Flood Hazard Mapping. Water 2020, 12, 1717. [Google Scholar] [CrossRef]
- Tarolli, P.; Straffelini, E. Agriculture in Hilly and Mountainous Landscapes: Threats, Monitoring and Sustainable Management. Geogr. Sustain. 2020, 1, 70–76. [Google Scholar] [CrossRef]
- Akiva, P.; Planche, B.; Roy, A.; Dana, K.; Oudemans, P.; Mars, M. AI on the Bog: Monitoring and Evaluating Cranberry Crop Risk. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 2492–2501. [Google Scholar]
- Andreasen, C.; Rasmussen, J.; Bitarafan, Z. Site-Specific Seed Yield Prediction of Red Fescue (Festuca rubra L.) Based on Drone Imaging and Local Regression Models. Agronomy 2023, 13, 316. [Google Scholar] [CrossRef]
- Shafi, U.; Mumtaz, R.; Anwar, Z.; Ajmal, M.M.; Khan, M.A.; Mahmood, Z.; Qamar, M.; Jhanzab, H.M. Tackling Food Insecurity Using Remote Sensing and Machine Learning-Based Crop Yield Prediction. IEEE Access 2023, 11, 108640–108657. [Google Scholar] [CrossRef]
- Alexandris, S.; Psomiadis, E.; Proutsos, N.; Philippopoulos, P.; Charalampopoulos, I.; Kakaletris, G.; Papoutsi, E.-M.; Vassilakis, S.; Paraskevopoulos, A. Integrating Drone Technology into an Innovative Agrometeorological Methodology for the Precise and Real-Time Estimation of Crop Water Requirements. Hydrology 2021, 8, 131. [Google Scholar] [CrossRef]
- Hama, A.; Tanaka, K.; Mochizuki, A.; Tsuruoka, Y.; Kondoh, A. Estimating the Protein Concentration in Rice Grain Using UAV Imagery Together with Agroclimatic Data. Agronomy 2020, 10, 431. [Google Scholar] [CrossRef]
- Drimaj, J.; Skoták, V.; Kamler, J.; Plhal, R.; Adamec, Z.; Mikulka, O.; Janata, P. Comparison of Methods for Estimating Damage by Wild Ungulates on Field Crops. Agriculture 2023, 13, 1184. [Google Scholar] [CrossRef]
- McCarthy, C.; Nyoni, Y.; Kachamba, D.J.; Banda, L.B.; Moyo, B.; Chisambi, C.; Banfill, J.; Hoshino, B. Can Drones Help Smallholder Farmers Improve Agriculture Efficiencies and Reduce Food Insecurity in Sub-Saharan Africa? Local Perceptions from Malawi. Agriculture 2023, 13, 1075. [Google Scholar] [CrossRef]
- Alsumayt, A.; El-Haggar, N.; Amouri, L.; Alfawaer, Z.M.; Aljameel, S.S. Smart Flood Detection with AI and Blockchain Integration in Saudi Arabia Using Drones. Sensors 2023, 23, 5148. [Google Scholar] [CrossRef]
- Belcore, E.; Piras, M.; Pezzoli, A. Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping. Sensors 2022, 22, 5622. [Google Scholar] [CrossRef]
- Sodnik, J.; Mikoš, M.; Bezak, N. Torrential Hazards’ Mitigation Measures in a Typical Alpine Catchment in Slovenia. Appl. Sci. 2023, 13, 11136. [Google Scholar] [CrossRef]
- Tiepolo, M.; Belcore, E.; Braccio, S.; Issa, S.; Massazza, G.; Rosso, M.; Tarchiani, V. Method for Fluvial and Pluvial Flood Risk Assessment in Rural Settlements. MethodsX 2021, 8, 101463. [Google Scholar] [CrossRef] [PubMed]
- Whitehurst, D.; Friedman, B.; Kochersberger, K.; Sridhar, V.; Weeks, J. Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development. Remote Sens. 2021, 13, 1739. [Google Scholar] [CrossRef]
- Hernández-López, D.; López-Rebollo, J.; Moreno, M.A.; Gonzalez-Aguilera, D. Automatic Processing for Identification of Forest Fire Risk Areas along High-Voltage Power Lines Using Coarse-to-Fine LiDAR Data. Forests 2023, 14, 662. [Google Scholar] [CrossRef]
- Munawar, H.S.; Gharineiat, Z.; Akram, J.; Imran Khan, S. A Framework for Burnt Area Mapping and Evacuation Problem Using Aerial Imagery Analysis. Fire 2022, 5, 122. [Google Scholar] [CrossRef]
- Andrade, S.D.; Saltos, E.; Nogales, V.; Cruz, S.; Lee, G.; Barclay, J. Detailed Cartography of Cotopaxi’s 1877 Primary Lahar Deposits Obtained by Drone-Imagery and Field Surveys in the Proximal Northern Drainage. Remote Sens. 2022, 14, 631. [Google Scholar] [CrossRef]
- Minervino Amodio, A.; Di Paola, G.; Rosskopf, C.M. Monitoring Coastal Vulnerability by Using DEMs Based on UAV Spatial Data. ISPRS Int. J. Geoinf. 2022, 11, 155. [Google Scholar] [CrossRef]
- Casagrande, G.; Bezzi, A.; Fracaros, S.; Martinucci, D.; Pillon, S.; Salvador, P.; Sponza, S.; Fontolan, G. Quantifying Transgressive Coastal Changes Using UAVs: Dune Migration, Overwash Recovery, and Barrier Flooding Assessment and Interferences with Human and Natural Assets. J. Mar. Sci. Eng. 2023, 11, 1044. [Google Scholar] [CrossRef]
- Alberico, I.; Casalbore, D.; Pelosi, N.; Tonielli, R.; Calidonna, C.; Dominici, R.; De Rosa, R. Remote Sensing and Field Survey Data Integration to Investigate on the Evolution of the Coastal Area: The Case Study of Bagnara Calabra (Southern Italy). Remote Sens. 2022, 14, 2459. [Google Scholar] [CrossRef]
- Kaiser, S.; Boike, J.; Grosse, G.; Langer, M. The Potential of UAV Imagery for the Detection of Rapid Permafrost Degradation: Assessing the Impacts on Critical Arctic Infrastructure. Remote Sens. 2022, 14, 6107. [Google Scholar] [CrossRef]
- Mackinnon, S. The Ontological Multiplicity of Digital Heritage Objects: 3D Modelling in the Cherish Project. Heritage 2023, 6, 1397–1410. [Google Scholar] [CrossRef]
- Nicu, I.C.; Rubensdotter, L.; Stalsberg, K.; Nau, E. Coastal Erosion of Arctic Cultural Heritage in Danger: A Case Study from Svalbard, Norway. Water 2021, 13, 784. [Google Scholar] [CrossRef]
- Muñiz-Sánchez, V.; Valdez-Delgado, K.M.; Hernandez-Lopez, F.J.; Moo-Llanes, D.A.; González-Farías, G.; Danis-Lozano, R. Use of Unmanned Aerial Vehicles for Building a House Risk Index of Mosquito-Borne Viral Diseases. Machines 2022, 10, 1161. [Google Scholar] [CrossRef]
- Saavedra-Ruiz, M.; Pinto-Vargas, A.M.; Romero-Cano, V. Monocular Visual Autonomous Landing System for Quadcopter Drones Using Software in the Loop. IEEE Aerosp. Electron. Syst. Mag. 2022, 37, 2–16. [Google Scholar] [CrossRef]
- Song, S.; Huang, T.; Li, C.; Shao, G.; Gao, Y.; Zhu, Q. A Safety-Assured Semantic Map for an Unstructured Terrain Environment towards Autonomous Engineering Vehicles. Drones 2023, 7, 550. [Google Scholar] [CrossRef]
- Fernandez Romero, S.; Morata Barrado, P.; Rivero Rodriguez, M.A.; Vazquez Yañez, G.A.; De Diego Custodio, E.; Michelena, M.D. Vector Magnetometry Using Remotely Piloted Aircraft Systems: An Example of Application for Planetary Exploration. Remote Sens. 2021, 13, 390. [Google Scholar] [CrossRef]
- Carvalho, R.C.; Woodroffe, C.D. Morphological Exposure of Rocky Platforms: Filling the Hazard Gap Using UAVs. Drones 2019, 3, 42. [Google Scholar] [CrossRef]
- Al-Dosari, K.; Hunaiti, Z.; Balachandran, W. Mega Sporting Event Scenario Analysis and Drone Camera Surveillance Impacts on Command-and-Control Centre Situational Awareness for Dynamic Decision-Making. Safety 2023, 9, 54. [Google Scholar] [CrossRef]
- Alrammah, I.A.; AlShareef, M.R. A Digitalized Framework for Responding to Radiological Accidents in a Public Major Event. J. Radiat. Res. Appl. Sci. 2023, 16, 100536. [Google Scholar] [CrossRef]
- Castenschiold, J.H.F.; Gehrlein, J.B.; Bech-Hansen, M.; Kallehauge, R.M.; Pertoldi, C.; Bruhn, D. Monitoring Dropping Densities with Unmanned Aerial Vehicles (UAV): An Effective Tool to Assess Distribution Patterns in Field Utilization by Foraging Geese. Symmetry 2022, 14, 2175. [Google Scholar] [CrossRef]
- Lefcourt, A.; Siemens, M.; Rivadeneira, P. Optical Parameters for Using Visible-Wavelength Reflectance or Fluorescence Imaging to Detect Bird Excrements in Produce Fields. Appl. Sci. 2019, 9, 715. [Google Scholar] [CrossRef]
- Fudala, K.; Bialik, R.J. The Use of Drone-Based Aerial Photogrammetry in Population Monitoring of Southern Giant Petrels in ASMA 1, King George Island, Maritime Antarctica. Glob. Ecol. Conserv. 2022, 33, e01990. [Google Scholar] [CrossRef]
- Michez, A.; Broset, S.; Lejeune, P. Ears in the Sky: Potential of Drones for the Bioacoustic Monitoring of Birds and Bats. Drones 2021, 5, 9. [Google Scholar] [CrossRef]
- Bollard, B.; Doshi, A.; Gilbert, N.; Poirot, C.; Gillman, L. Drone Technology for Monitoring Protected Areas in Remote and Fragile Environments. Drones 2022, 6, 42. [Google Scholar] [CrossRef]
- Detka, J.; Coyle, H.; Gomez, M.; Gilbert, G.S. A Drone-Powered Deep Learning Methodology for High Precision Remote Sensing in California’s Coastal Shrubs. Drones 2023, 7, 421. [Google Scholar] [CrossRef]
- Han, S.M.; Lee, J.R.; Nam, K.-H. Drone-Based Monitoring and Mapping for LMO Confined Field Management under the Ministry of Environment. Appl. Sci. 2023, 13, 10627. [Google Scholar] [CrossRef]
- Del Curto, D.; Garzulino, A.; Menini, G.; Schiesaro, C. Sustainable Conservation and Management of a 20th-Century Landscape in the Alps: The Former Sanatorium Village of Sondalo. Sustainability 2022, 14, 7424. [Google Scholar] [CrossRef]
- Takeshige, R.; Onishi, M.; Aoyagi, R.; Sawada, Y.; Imai, N.; Ong, R.; Kitayama, K. Mapping the Spatial Distribution of Fern Thickets and Vine-Laden Forests in the Landscape of Bornean Logged-Over Tropical Secondary Rainforests. Remote Sens. 2022, 14, 3354. [Google Scholar] [CrossRef]
- Penglase, K.; Lewis, T.; Srivastava, S.K. A New Approach to Estimate Fuel Budget and Wildfire Hazard Assessment in Commercial Plantations Using Drone-Based Photogrammetry and Image Analysis. Remote Sens. 2023, 15, 2621. [Google Scholar] [CrossRef]
- Valdez-Delgado, K.M.; Garcia-Salazar, O.; Moo-Llanes, D.A.; Izcapa-Treviño, C.; Cruz-Pliego, M.A.; Domínguez-Posadas, G.Y.; Armendáriz-Valdez, M.O.; Correa-Morales, F.; Cisneros-Vázquez, L.A.; Ordóñez-González, J.G.; et al. Mapping the Urban Environments of Aedes Aegypti Using Drone Technology. Drones 2023, 7, 581. [Google Scholar] [CrossRef]
- Trujillano, F.; Jimenez Garay, G.; Alatrista-Salas, H.; Byrne, I.; Nunez-del-Prado, M.; Chan, K.; Manrique, E.; Johnson, E.; Apollinaire, N.; Kouame Kouakou, P.; et al. Mapping Malaria Vector Habitats in West Africa: Drone Imagery and Deep Learning Analysis for Targeted Vector Surveillance. Remote Sens. 2023, 15, 2775. [Google Scholar] [CrossRef]
- Niwa, H.; Hirata, T. A New Method for Surveying the World’s Smallest Class of Dragonfly in Wetlands Using Unoccupied Aerial Vehicles. Drones 2022, 6, 427. [Google Scholar] [CrossRef]
- Lee, K.H. Improvement in Target Range Estimation and the Range Resolution Using Drone. Electronics 2020, 9, 1136. [Google Scholar] [CrossRef]
- Lee, K.-H. A Study on Distance Measurement Module for Driving Vehicle Velocity Estimation in Multi-Lanes Using Drones. Appl. Sci. 2021, 11, 3884. [Google Scholar] [CrossRef]
- Mahajan, V.; Barmpounakis, E.; Alam, M.R.; Geroliminis, N.; Antoniou, C. Treating Noise and Anomalies in Vehicle Trajectories from an Experiment with a Swarm of Drones. IEEE Trans. Intell. Transp. Syst. 2023, 24, 9055–9067. [Google Scholar] [CrossRef]
- Jiang, B.; Givigi, S.N.; Delamer, J.-A. A MARL Approach for Optimizing Positions of VANET Aerial Base-Stations on a Sparse Highway. IEEE Access 2021, 9, 133989–134004. [Google Scholar] [CrossRef]
- Wang, C.; Wei, L.; Wang, K.; Tang, H.; Yang, B.; Li, M. Investigating the Factors Affecting Rider’s Decision on Overtaking Behavior: A Naturalistic Riding Research in China. Sustainability 2022, 14, 11495. [Google Scholar] [CrossRef]
- Wang, K.; Lu, J.J. A Two-Layer Risky Driver Recognition Model with Context Awareness. IEEE Access 2021, 9, 138483–138495. [Google Scholar] [CrossRef]
- Carić, H.; Cukrov, N.; Omanović, D. Nautical Tourism in Marine Protected Areas (MPAs): Evaluating an Impact of Copper Emission from Antifouling Coating. Sustainability 2021, 13, 11897. [Google Scholar] [CrossRef]
- Bandini, F.; Kooij, L.; Mortensen, B.K.; Caspersen, M.B.; Thomsen, L.G.; Olesen, D.; Bauer-Gottwein, P. Mapping Inland Water Bathymetry with Ground Penetrating Radar (GPR) on Board Unmanned Aerial Systems (UASs). J. Hydrol. 2023, 616, 128789. [Google Scholar] [CrossRef]
- Carlson, D.F.; Akbulut, S.; Rasmussen, J.F.; Hestbech, C.S.; Andersen, M.H.; Melvad, C. Compact and Modular Autonomous Surface Vehicle for Water Research: The Naval Operating Research Drone Assessing Climate Change (NORDACC). HardwareX 2023, 15, e00453. [Google Scholar] [CrossRef]
- Graham, C.T.; O’Connor, I.; Broderick, L.; Broderick, M.; Jensen, O.; Lally, H.T. Drones Can Reliably, Accurately and with High Levels of Precision, Collect Large Volume Water Samples and Physio-Chemical Data from Lakes. Sci. Total Environ. 2022, 824, 153875. [Google Scholar] [CrossRef]
- Douglas Greene, S.B.; LeFevre, G.H.; Markfort, C.D. Improving the Spatial and Temporal Monitoring of Cyanotoxins in Iowa Lakes Using a Multiscale and Multi-Modal Monitoring Approach. Sci. Total Environ. 2021, 760, 143327. [Google Scholar] [CrossRef]
- Bourke, E.; Raoult, V.; Williamson, J.E.; Gaston, T.F. Estuary Stingray (Dasyatis fluviorum) Behaviour Does Not Change in Response to Drone Altitude. Drones 2023, 7, 164. [Google Scholar] [CrossRef]
- Bousquet, O.; Barruol, G.; Cordier, E.; Barthe, C.; Bielli, S.; Calmer, R.; Rindraharisaona, E.; Roberts, G.; Tulet, P.; Amelie, V.; et al. Impact of Tropical Cyclones on Inhabited Areas of the SWIO Basin at Present and Future Horizons. Part 1: Overview and Observing Component of the Research Project RENOVRISK-CYCLONE. Atmosphere 2021, 12, 544. [Google Scholar] [CrossRef]
- Gorkin, R.; Adams, K.; Berryman, M.J.; Aubin, S.; Li, W.; Davis, A.R.; Barthelemy, J. Sharkeye: Real-Time Autonomous Personal Shark Alerting via Aerial Surveillance. Drones 2020, 4, 18. [Google Scholar] [CrossRef]
- Liu, Z.Y.-C.; Chamberlin, A.J.; Tallam, K.; Jones, I.J.; Lamore, L.L.; Bauer, J.; Bresciani, M.; Wolfe, C.M.; Casagrandi, R.; Mari, L.; et al. Deep Learning Segmentation of Satellite Imagery Identifies Aquatic Vegetation Associated with Snail Intermediate Hosts of Schistosomiasis in Senegal, Africa. Remote Sens. 2022, 14, 1345. [Google Scholar] [CrossRef]
- Tait, L.W.; Orchard, S.; Schiel, D.R. Missing the Forest and the Trees: Utility, Limits and Caveats for Drone Imaging of Coastal Marine Ecosystems. Remote Sens. 2021, 13, 3136. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Mury, A.; Collin, A.; Houet, T.; Alvarez-Vanhard, E.; James, D. Using Multispectral Drone Imagery for Spatially Explicit Modeling of Wave Attenuation through a Salt Marsh Meadow. Drones 2020, 4, 25. [Google Scholar] [CrossRef]
- Yan, S.; Li, J.; Wang, J.; Liu, G.; Ai, A.; Liu, R. A Novel Strategy for Extracting Richer Semantic Information Based on Fault Detection in Power Transmission Lines. Entropy 2023, 25, 1333. [Google Scholar] [CrossRef]
- Jalil, B.; Leone, G.R.; Martinelli, M.; Moroni, D.; Pascali, M.A.; Berton, A. Fault Detection in Power Equipment via an Unmanned Aerial System Using Multi Modal Data. Sensors 2019, 19, 3014. [Google Scholar] [CrossRef]
- Filatov, A.; Zaslavskiy, M.; Krinkin, K. Multi-Drone 3D Building Reconstruction Method. Mathematics 2021, 9, 3033. [Google Scholar] [CrossRef]
- Mayer, Z.; Heuer, J.; Volk, R.; Schultmann, F. Aerial Thermographic Image-Based Assessment of Thermal Bridges Using Representative Classifications and Calculations. Energies 2021, 14, 7360. [Google Scholar] [CrossRef]
- Storch, M.; Jarmer, T.; Adam, M.; de Lange, N. Systematic Approach for Remote Sensing of Historical Conflict Landscapes with UAV-Based Laserscanning. Sensors 2021, 22, 217. [Google Scholar] [CrossRef]
- Aurell, J.; Gullett, B.; Holder, A.; Kiros, F.; Mitchell, W.; Watts, A.; Ottmar, R. Wildland Fire Emission Sampling at Fishlake National Forest, Utah Using an Unmanned Aircraft System. Atmos. Environ. 2021, 247, 118193. [Google Scholar] [CrossRef]
- Molnár, A. Gamma Radiation Dose Measurement Using an Energy-Selective Method with the Help of a Drone. Sensors 2022, 22, 9062. [Google Scholar] [CrossRef]
- García-Cobos, F.J.; Paniagua-Sánchez, J.M.; Gordillo-Guerrero, A.; Marabel-Calderón, C.; Rufo-Pérez, M.; Jiménez-Barco, A. Personal Exposimeter Coupled to a Drone as a System for Measuring Environmental Electromagnetic Fields. Environ. Res. 2023, 216, 114483. [Google Scholar] [CrossRef]
- Reaney, S.M.; Mackay, E.B.; Haygarth, P.M.; Fisher, M.; Molineux, A.; Potts, M.; Benskin, C. McW.H. Identifying Critical Source Areas Using Multiple Methods for Effective Diffuse Pollution Mitigation. J. Environ. Manag. 2019, 250, 109366. [Google Scholar] [CrossRef]
- Fumian, F.; Di Giovanni, D.; Martellucci, L.; Rossi, R.; Gaudio, P. Application of Miniaturized Sensors to Unmanned Aerial Systems, A New Pathway for the Survey of Polluted Areas: Preliminary Results. Atmosphere 2020, 11, 471. [Google Scholar] [CrossRef]
- Jia, X.; Cao, Y.; O’Connor, D.; Zhu, J.; Tsang, D.C.W.; Zou, B.; Hou, D. Mapping Soil Pollution by Using Drone Image Recognition and Machine Learning at an Arsenic-Contaminated Agricultural Field. Environ. Pollut. 2021, 270, 116281. [Google Scholar] [CrossRef] [PubMed]
- Duangsuwan, S.; Prapruetdee, P.; Subongkod, M.; Klubsuwan, K. 3D AQI Mapping Data Assessment of Low-Altitude Drone Real-Time Air Pollution Monitoring. Drones 2022, 6, 191. [Google Scholar] [CrossRef]
- Mokhtari, I.; Bechkit, W.; Rivano, H. A Generic Framework for Monitoring Pollution Plumes in Emergencies Using UAVs. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–9. [Google Scholar]
- Chen, T.-H.K.; Prishchepov, A.V.; Fensholt, R.; Sabel, C.E. Detecting and Monitoring Long-Term Landslides in Urbanized Areas with Nighttime Light Data and Multi-Seasonal Landsat Imagery across Taiwan from 1998 to 2017. Remote Sens Environ. 2019, 225, 317–327. [Google Scholar] [CrossRef]
- de Sousa, A.M.; Viana, C.D.; Garcia, G.P.B.; Grohmann, C.H. Monitoring Geological Risk Areas in the City of São Paulo Based on Multi-Temporal High-Resolution 3D Models. Remote Sens. 2023, 15, 3028. [Google Scholar] [CrossRef]
- Di, Y.; Wei, Y.; Tan, W.; Xu, Q. Research on Development Characteristics and Landslide Dam Hazard Prediction of Zhuangfang Landslide in the Upper Reaches of the Nu River. Sustainability 2023, 15, 15036. [Google Scholar] [CrossRef]
- Robiati, C.; Mastrantoni, G.; Francioni, M.; Eyre, M.; Coggan, J.; Mazzanti, P. Contribution of High-Resolution Virtual Outcrop Models for the Definition of Rockfall Activity and Associated Hazard Modelling. Land 2023, 12, 191. [Google Scholar] [CrossRef]
- Morante, F.; Aguilar, M.; Ramírez, G.; Blanco, R.; Carrión, P.; Briones, J.; Berrezueta, E. Evaluation of Slope Stability Considering the Preservation of the General Patrimonial Cemetery of Guayaquil, Ecuador. Geosciences 2019, 9, 103. [Google Scholar] [CrossRef]
- Cao, H.; Ma, G.; Liu, P.; Qin, X.; Wu, C.; Lu, J. Multi-Factor Analysis on the Stability of High Slopes in Open-Pit Mines. Appl. Sci. 2023, 13, 5940. [Google Scholar] [CrossRef]
- Li, Y.; Shen, J.; Huang, M.; Peng, Z. Debris Flow Classification and Risk Assessment Based on Combination Weighting Method and Cluster Analysis: A Case Study of Debris Flow Clusters in Longmenshan Town, Pengzhou, China. Appl. Sci. 2023, 13, 7551. [Google Scholar] [CrossRef]
- Vanneschi, C.; Di Camillo, M.; Aiello, E.; Bonciani, F.; Salvini, R. SfM-MVS Photogrammetry for Rockfall Analysis and Hazard Assessment along the Ancient Roman via Flaminia Road at the Furlo Gorge (Italy). ISPRS Int. J. Geoinf. 2019, 8, 325. [Google Scholar] [CrossRef]
- Lin, C.-S.; Chen, S.-H.; Chang, C.-M.; Shen, T.-W. Crack Detection on a Retaining Wall with an Innovative, Ensemble Learning Method in a Dynamic Imaging System. Sensors 2019, 19, 4784. [Google Scholar] [CrossRef] [PubMed]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P.V. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- da Silva, Y.; Andrade, F.; Sousa, L.; de Castro, G.; Dias, J.; Berger, G.; Lima, J.; Pinto, M. Computer Vision Based Path Following for Autonomous Unmanned Aerial Systems in Unburied Pipeline Onshore Inspection. Drones 2022, 6, 410. [Google Scholar] [CrossRef]
- Forkan, A.R.M.; Kang, Y.-B.; Jayaraman, P.P.; Liao, K.; Kaul, R.; Morgan, G.; Ranjan, R.; Sinha, S. CorrDetector: A Framework for Structural Corrosion Detection from Drone Images Using Ensemble Deep Learning. Expert. Syst. Appl. 2022, 193, 116461. [Google Scholar] [CrossRef]
- Kabbabe Poleo, K.; Crowther, W.J.; Barnes, M. Estimating the Impact of Drone-Based Inspection on the Levelised Cost of Electricity for Offshore Wind Farms. Results Eng. 2021, 9, 100201. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Jacobsen, R.H.; Matlekovic, L.; Shi, L.; Malle, N.; Ayoub, N.; Hageman, K.; Hansen, S.; Nyboe, F.F.; Ebeid, E. Design of an Autonomous Cooperative Drone Swarm for Inspections of Safety Critical Infrastructure. Appl. Sci. 2023, 13, 1256. [Google Scholar] [CrossRef]
- Kim, S.; Kim, S.; Lee, D.-E. Sustainable Application of Hybrid Point Cloud and BIM Method for Tracking Construction Progress. Sustainability 2020, 12, 4106. [Google Scholar] [CrossRef]
- Manzoor, B.; Othman, I.; Pomares, J.C.; Chong, H.-Y. A Research Framework of Mitigating Construction Accidents in High-Rise Building Projects via Integrating Building Information Modeling with Emerging Digital Technologies. Appl. Sci. 2021, 11, 8359. [Google Scholar] [CrossRef]
- Kolster, M.E.; Wigh, M.D.; Lima Simões da Silva, E.; Bjerg Vilhelmsen, T.; Døssing, A. High-Speed Magnetic Surveying for Unexploded Ordnance Using UAV Systems. Remote Sens. 2022, 14, 1134. [Google Scholar] [CrossRef]
- Yoo, L.-S.; Lee, J.-H.; Lee, Y.-K.; Jung, S.-K.; Choi, Y. Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone. Sensors 2021, 21, 3175. [Google Scholar] [CrossRef] [PubMed]
- Mandirola, M.; Casarotti, C.; Peloso, S.; Lanese, I.; Brunesi, E.; Senaldi, I. Use of UAS for Damage Inspection and Assessment of Bridge Infrastructures. Int. J. Disaster Risk Reduct. 2022, 72, 102824. [Google Scholar] [CrossRef]
- Baek, S.-C.; Lee, K.-H.; Kim, I.-H.; Seo, D.-M.; Park, K. Construction of Asbestos Slate Deep-Learning Training-Data Model Based on Drone Images. Sensors 2023, 23, 8021. [Google Scholar] [CrossRef]
- de Smet, T.S.; Nikulin, A.; Balrup, N.; Graber, N. Successful Integration of UAV Aeromagnetic Mapping with Terrestrial Methane Emissions Surveys in Orphaned Well Remediation. Remote Sens. 2023, 15, 5004. [Google Scholar] [CrossRef]
- Jenssen, R.O.R.; Eckerstorfer, M.; Jacobsen, S. Drone-Mounted Ultrawideband Radar for Retrieval of Snowpack Properties. IEEE Trans. Instrum. Meas. 2020, 69, 221–230. [Google Scholar] [CrossRef]
- Kelm, K.; Antos, S.; McLaren, R. Applying the FFP Approach to Wider Land Management Functions. Land 2021, 10, 723. [Google Scholar] [CrossRef]
- Manzoor, A.; Kim, K.; Pandey, S.R.; Kazmi, S.M.A.; Tran, N.H.; Saad, W.; Hong, C.S. Ruin Theory for Energy-Efficient Resource Allocation in UAV-Assisted Cellular Networks. IEEE Trans. Commun. 2021, 69, 3943–3956. [Google Scholar] [CrossRef]
- Hesselbrandt, M.; Erlström, M.; Sopher, D.; Acuna, J. Multidisciplinary Approaches for Assessing a High Temperature Borehole Thermal Energy Storage Facility at Linköping, Sweden. Energies 2021, 14, 4379. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Shvetsov, A.V.; Kumar, S.; Shvetsova, S.V.; Alhartomi, M.A.; Hawbani, A.; Rajput, N.S.; Srivastava, S.; Saif, A.; Nyangaresi, V.O. UAV Computing-Assisted Search and Rescue Mission Framework for Disaster and Harsh Environment Mitigation. Drones 2022, 6, 154. [Google Scholar] [CrossRef]
- Salmoral, G.; Rivas Casado, M.; Muthusamy, M.; Butler, D.; Menon, P.; Leinster, P. Guidelines for the Use of Unmanned Aerial Systems in Flood Emergency Response. Water 2020, 12, 521. [Google Scholar] [CrossRef]
- Burke, C.; McWhirter, P.R.; Veitch-Michaelis, J.; McAree, O.; Pointon, H.A.G.; Wich, S.; Longmore, S. Requirements and Limitations of Thermal Drones for Effective Search and Rescue in Marine and Coastal Areas. Drones 2019, 3, 78. [Google Scholar] [CrossRef]
- Calamoneri, T.; Coro, F.; Mancini, S. A Realistic Model to Support Rescue Operations After an Earthquake via UAVs. IEEE Access 2022, 10, 6109–6125. [Google Scholar] [CrossRef]
- Ho, Y.-H.; Tsai, Y.-J. Open Collaborative Platform for Multi-Drones to Support Search and Rescue Operations. Drones 2022, 6, 132. [Google Scholar] [CrossRef]
- McRae, J.N.; Gay, C.J.; Nielsen, B.M.; Hunt, A.P. Using an Unmanned Aircraft System (Drone) to Conduct a Complex High Altitude Search and Rescue Operation: A Case Study. Wilderness Environ. Med. 2019, 30, 287–290. [Google Scholar] [CrossRef] [PubMed]
- McRae, J.N.; Nielsen, B.M.; Gay, C.J.; Hunt, A.P.; Nigh, A.D. Utilizing Drones to Restore and Maintain Radio Communication During Search and Rescue Operations. Wilderness Environ. Med. 2021, 32, 41–46. [Google Scholar] [CrossRef] [PubMed]
- Muhamat, A.A.; Zulkifli, A.F.; Ibrahim, M.A.; Sulaiman, S.; Subramaniam, G.; Mohamad, S.; Suzuki, Y. Realising the Corporate Social Performance (CSP) of Takaful (Islamic Insurance) Operators through Drone-Assisted Disaster Victim Identification (DVI). Sustainability 2022, 14, 5440. [Google Scholar] [CrossRef]
- Fakhrulddin, S.S.; Gharghan, S.K.; Al-Naji, A.; Chahl, J. An Advanced First Aid System Based on an Unmanned Aerial Vehicles and a Wireless Body Area Sensor Network for Elderly Persons in Outdoor Environments. Sensors 2019, 19, 2955. [Google Scholar] [CrossRef] [PubMed]
- De Silvestri, S.; Pagliarani, M.; Tomasello, F.; Trojaniello, D.; Sanna, A. Design of a Service for Hospital Internal Transport of Urgent Pharmaceuticals via Drones. Drones 2022, 6, 70. [Google Scholar] [CrossRef]
- Quintanilla García, I.; Vera Vélez, N.; Alcaraz Martínez, P.; Vidal Ull, J.; Fernández Gallo, B. A Quickly Deployed and UAS-Based Logistics Network for Delivery of Critical Medical Goods during Healthcare System Stress Periods: A Real Use Case in Valencia (Spain). Drones 2021, 5, 13. [Google Scholar] [CrossRef]
- Du, L.; Li, X.; Gan, Y.; Leng, K. Optimal Model and Algorithm of Medical Materials Delivery Drone Routing Problem under Major Public Health Emergencies. Sustainability 2022, 14, 4651. [Google Scholar] [CrossRef]
- Marturano, F.; Martellucci, L.; Chierici, A.; Malizia, A.; Di Giovanni, D.; d’Errico, F.; Gaudio, P.; Ciparisse, J.-F. Numerical Fluid Dynamics Simulation for Drones’ Chemical Detection. Drones 2021, 5, 69. [Google Scholar] [CrossRef]
- Redi, A.A.N.P.; Sopha, B.M.; Asih, A.M.S.; Liperda, R.I. Collaborative Hybrid Aerial and Ground Vehicle Routing for Post-Disaster Assessment. Sustainability 2021, 13, 12841. [Google Scholar] [CrossRef]
- Peña, P.F.; Ragab, A.R.; Luna, M.A.; Ale Isaac, M.S.; Campoy, P. WILD HOPPER: A Heavy-Duty UAV for Day and Night Firefighting Operations. Heliyon 2022, 8, e09588. [Google Scholar] [CrossRef]
- Aydin, B.; Selvi, E.; Tao, J.; Starek, M. Use of Fire-Extinguishing Balls for a Conceptual System of Drone-Assisted Wildfire Fighting. Drones 2019, 3, 17. [Google Scholar] [CrossRef]
- Robakowska, M.; Ślęzak, D.; Żuratyński, P.; Tyrańska-Fobke, A.; Robakowski, P.; Prędkiewicz, P.; Zorena, K. Possibilities of Using UAVs in Pre-Hospital Security for Medical Emergencies. Int. J. Environ. Res. Public Health 2022, 19, 10754. [Google Scholar] [CrossRef]
- Beck, S.; Bui, T.; Davies, A.; Courtney, P.; Brown, A.; Geudens, J.; Royall, P. An Evaluation of the Drone Delivery of Adrenaline Auto-Injectors for Anaphylaxis: Pharmacists’ Perceptions, Acceptance, and Concerns. Drones 2020, 4, 66. [Google Scholar] [CrossRef]
- Yang, J.; Ding, Z.; Wang, L. The Programming Model of Air-Ground Cooperative Patrol Between Multi-UAV and Police Car. IEEE Access 2021, 9, 134503–134517. [Google Scholar] [CrossRef]
- Alon, O.; Rabinovich, S.; Fyodorov, C.; Cauchard, J.R. First Step toward Gestural Recognition in Harsh Environments. Sensors 2021, 21, 3997. [Google Scholar] [CrossRef] [PubMed]
- Earthperson, A.; Diaconeasa, M.A. Integrating Commercial-Off-The-Shelf Components into Radiation-Hardened Drone Designs for Nuclear-Contaminated Search and Rescue Missions. Drones 2023, 7, 528. [Google Scholar] [CrossRef]
- Restás, Á. Drone Applications Fighting COVID-19 Pandemic—Towards Good Practices. Drones 2022, 6, 15. [Google Scholar] [CrossRef]
- Chi, N.T.K.; Phong, L.T.; Hanh, N.T. The Drone Delivery Services: An Innovative Application in an Emerging Economy. Asian J. Shipp. Logist. 2023, 39, 39–45. [Google Scholar] [CrossRef]
- Sookram, N.; Ramsewak, D.; Singh, S. The Conceptualization of an Unmanned Aerial System (UAS) Ship–Shore Delivery Service for the Maritime Industry of Trinidad. Drones 2021, 5, 76. [Google Scholar] [CrossRef]
- Yaprak, Ü.; Kılıç, F.; Okumuş, A. Is the COVID-19 Pandemic Strong Enough to Change the Online Order Delivery Methods? Changes in the Relationship between Attitude and Behavior towards Order Delivery by Drone. Technol. Forecast. Soc. Change 2021, 169, 120829. [Google Scholar] [CrossRef] [PubMed]
- Jasim, N.I.; Kasim, H.; Mahmoud, M.A. Towards the Development of Smart and Sustainable Transportation System for Foodservice Industry: Modelling Factors Influencing Customer’s Intention to Adopt Drone Food Delivery (DFD) Services. Sustainability 2022, 14, 2852. [Google Scholar] [CrossRef]
- Niglio, F.; Comite, P.; Cannas, A.; Pirri, A.; Tortora, G. Preliminary Clinical Validation of a Drone-Based Delivery System in Urban Scenarios Using a Smart Capsule for Blood. Drones 2022, 6, 195. [Google Scholar] [CrossRef]
- Sham, R.; Siau, C.S.; Tan, S.; Kiu, D.C.; Sabhi, H.; Thew, H.Z.; Selvachandran, G.; Quek, S.G.; Ahmad, N.; Ramli, M.H.M. Drone Usage for Medicine and Vaccine Delivery during the COVID-19 Pandemic: Attitude of Health Care Workers in Rural Medical Centres. Drones 2022, 6, 109. [Google Scholar] [CrossRef]
- Truog, S.; Maxim, L.; Matemba, C.; Blauvelt, C.; Ngwira, H.; Makaya, A.; Moreira, S.; Lawrence, E.; Ailstock, G.; Weitz, A.; et al. Insights Before Flights: How Community Perceptions Can Make or Break Medical Drone Deliveries. Drones 2020, 4, 51. [Google Scholar] [CrossRef]
- Jones, R.W.; Despotou, G. Unmanned Aerial Systems and Healthcare: Possibilities and Challenges. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 189–194. [Google Scholar]
- Heiets, I.; Kuo, Y.-W.; La, J.; Yeun, R.C.K.; Verhagen, W. Future Trends in UAV Applications in the Australian Market. Aerospace 2023, 10, 555. [Google Scholar] [CrossRef]
- Umeda, S.; Yoshikawa, N.; Seo, Y. Cost and Workload Assessment of Agricultural Drone Sprayer: A Case Study of Rice Production in Japan. Sustainability 2022, 14, 10850. [Google Scholar] [CrossRef]
- Dams, B.; Chen, B.; Shepherd, P.; Ball, R.J. Development of Cementitious Mortars for Aerial Additive Manufacturing. Appl. Sci. 2023, 13, 641. [Google Scholar] [CrossRef]
- Bridgelall, R. Reducing Risks by Transporting Dangerous Cargo in Drones. Sustainability 2022, 14, 13044. [Google Scholar] [CrossRef]
- Konigsburg, J.A. Modern Warfare, Spiritual Health, and the Role of Artificial Intelligence. Religions 2022, 13, 343. [Google Scholar] [CrossRef]
- Jan, S.U.; Khan, H.U. Identity and Aggregate Signature-Based Authentication Protocol for IoD Deployment Military Drone. IEEE Access 2021, 9, 130247–130263. [Google Scholar] [CrossRef]
- Tubis, A.A.; Ryczyński, J.; Żurek, A. Risk Assessment for the Use of Drones in Warehouse Operations in the First Phase of Introducing the Service to the Market. Sensors 2021, 21, 6713. [Google Scholar] [CrossRef] [PubMed]
- Salazar, F.; Martínez-García, M.S.; de Castro, A.; Chávez-Fuentes, C.; Cazorla, M.; Ureña-Aguirre, J.d.P.; Altamirano, S. UAVs for Business Adoptions in Smart City Environments: Inventory Management System. Electronics 2023, 12, 2090. [Google Scholar] [CrossRef]
- Rábago, J.; Portuguez-Castro, M. Use of Drone Photogrammetry as An Innovative, Competency-Based Architecture Teaching Process. Drones 2023, 7, 187. [Google Scholar] [CrossRef]
- Ma, B.; Wu, J.; Liu, W.; Chiaraviglio, L.; Ming, X. Combating Hard or Soft Disasters with Privacy-Preserving Federated Mobile Buses-and-Drones Based Networks. In Proceedings of the 2020 IEEE 21st International Conference on Information Reuse and Integration for Data Science (IRI), Las Vegas, NV, USA, 11–13 August 2020; pp. 31–36. [Google Scholar]
- Garcia, M.; Maza, I.; Ollero, A.; Gutierrez, D.; Aguirre, I.; Viguria, A. Release of Sterile Mosquitoes with Drones in Urban and Rural Environments under the European Drone Regulation. Appl. Sci. 2022, 12, 1250. [Google Scholar] [CrossRef]
- Matthews, G.A. New Technology for Desert Locust Control. Agronomy 2021, 11, 1052. [Google Scholar] [CrossRef]
- Wudenka, M.; Muller, M.G.; Demmel, N.; Wedler, A.; Triebel, R.; Cremers, D.; Sturzl, W. Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 8737–8744. [Google Scholar]
- Granati, G.; Cichella, F.; Lucidi, P. High-Tech Training for Birds of Prey. Animals 2021, 11, 530. [Google Scholar] [CrossRef]
- McDonnell, S.; Torcivia, C. Preliminary Proof of the Concept of Wild (Feral) Horses Following Light Aircraft into a Trap. Animals 2020, 10, 80. [Google Scholar] [CrossRef]
- Quan, L.; Zhang, Z.; Zhong, X.; Xu, C.; Gao, F. EVA-Planner: Environmental Adaptive Quadrotor Planning. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 398–404. [Google Scholar]
- Shao, Q.; Li, J.; Li, R.; Zhang, J.; Gao, X. Study of Urban Logistics Drone Path Planning Model Incorporating Service Benefit and Risk Cost. Drones 2022, 6, 418. [Google Scholar] [CrossRef]
- Wei, S.X.; Dixit, A.; Tomar, S.; Burdick, J.W. Moving Obstacle Avoidance: A Data-Driven Risk-Aware Approach. IEEE Control Syst. Lett. 2023, 7, 289–294. [Google Scholar] [CrossRef]
- Le Gall, K.; Lemarchand, L.; Dezan, C. Multi-Objective Optimization for an Online Re-Planning of Autonomous Vehicles. In Proceedings of the 2023 53rd Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), Porto, Portugal, 27–30 June 2023; pp. 48–51. [Google Scholar]
- Alolaiwy, M.; Hawsawi, T.; Zohdy, M.; Kaur, A.; Louis, S. Multi-Objective Routing Optimization in Electric and Flying Vehicles: A Genetic Algorithm Perspective. Appl. Sci. 2023, 13, 10427. [Google Scholar] [CrossRef]
- Hao, G.; Lv, Q.; Huang, Z.; Zhao, H.; Chen, W. UAV Path Planning Based on Improved Artificial Potential Field Method. Aerospace 2023, 10, 562. [Google Scholar] [CrossRef]
- Teng, H.; Ahmad, I.; Msm, A.; Chang, K. 3D Optimal Surveillance Trajectory Planning for Multiple UAVs by Using Particle Swarm Optimization with Surveillance Area Priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Al-kabi, H.; Mazinani, S.M. DNCS: New UAV Navigation with Considering the No-Fly Zone and Efficient Selection of the Charging Station. Ain Shams Eng. J. 2021, 12, 3669–3676. [Google Scholar] [CrossRef]
- Abbass, M.A.B.; Kang, H.-S. Drone Elevation Control Based on Python-Unity Integrated Framework for Reinforcement Learning Applications. Drones 2023, 7, 225. [Google Scholar] [CrossRef]
- Fan, Y.; Chu, S.; Zhang, W.; Song, R.; Li, Y. Learn by Observation: Imitation Learning for Drone Patrolling from Videos of a Human Navigator. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5209–5216. [Google Scholar]
- Kim, D.; Lee, B.; Sung, S. Observability-Driven Path Planning Design for Securing Three-Dimensional Navigation Performance of LiDAR SLAM. Aerospace 2023, 10, 492. [Google Scholar] [CrossRef]
- Qu, Z.; Willig, A. Sensorless and Coordination-Free Lane Switching on a Drone Road Segment—A Simulation Study. Drones 2022, 6, 411. [Google Scholar] [CrossRef]
- Rakotonarivo, B.; Drougard, N.; Conversy, S.; Garcia, J. Supporting Drone Mission Planning and Risk Assessment with Interactive Representations of Operational Parameters. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1091–1100. [Google Scholar]
- Li, C.; Gu, W.; Zheng, Y.; Huang, L.; Zhang, X. An ETA-Based Tactical Conflict Resolution Method for Air Logistics Transportation. Drones 2023, 7, 334. [Google Scholar] [CrossRef]
- Liu, C.; van Kampen, E.-J.; de Croon, G.C.H.E. Adaptive Risk-Tendency: Nano Drone Navigation in Cluttered Environments with Distributional Reinforcement Learning. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 7198–7204. [Google Scholar]
- Hussein, M.; Nouacer, R.; Corradi, F.; Ouhammou, Y.; Villar, E.; Tieri, C.; Castiñeira, R. Key Technologies for Safe and Autonomous Drones. Microprocess. Microsyst. 2021, 87, 104348. [Google Scholar] [CrossRef]
- Jane Fox, S. Drones: Foreseeing a “risky” Business? Policing the Challenge That Flies Above. Technol. Soc. 2022, 71, 102089. [Google Scholar] [CrossRef]
- Hann, R.; Enache, A.; Nielsen, M.C.; Stovner, B.N.; van Beeck, J.; Johansen, T.A.; Borup, K.T. Experimental Heat Loads for Electrothermal Anti-Icing and De-Icing on UAVs. Aerospace 2021, 8, 83. [Google Scholar] [CrossRef]
- Bui, S.T.; Luu, Q.K.; Nguyen, D.Q.; Le, N.D.M.; Loianno, G.; Ho, V.A. Tombo Propeller: Bioinspired Deformable Structure toward Collision-Accommodated Control for Drones. IEEE Trans. Robot. 2023, 39, 521–538. [Google Scholar] [CrossRef]
- Kocsis Szürke, S.; Perness, N.; Földesi, P.; Kurhan, D.; Sysyn, M.; Fischer, S. A Risk Assessment Technique for Energy-Efficient Drones to Support Pilots and Ensure Safe Flying. Infrastructures 2023, 8, 67. [Google Scholar] [CrossRef]
- Han Jie, C.; Hasrizam Che Man, M.; Sivakumar, A.K.; Huat Low, K. Preliminary Environmental Risk Consideration for Small UAV Ground Risk Mapping. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022; pp. 1–11. [Google Scholar]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E. Risky Zone Avoidance Strategies for Drones. In Proceedings of the 2021 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, ON, Canada, 12–17 September 2021; pp. 1–6. [Google Scholar]
- Kim, I.; Kim, H.; Kim, I.; Ohn, S.; Chi, S. Event-Based Emergency Detection for Safe Drone. Appl. Sci. 2022, 12, 8501. [Google Scholar] [CrossRef]
- Hong, J.-K. Vibration Prediction of Flying IoT Based on LSTM and GRU. Electronics 2022, 11, 1052. [Google Scholar] [CrossRef]
- Huang, S.; Liao, F.; Teo, R.S.H. Fault Tolerant Control of Quadrotor Based on Sensor Fault Diagnosis and Recovery Information. Machines 2022, 10, 1088. [Google Scholar] [CrossRef]
- Lee, J.-H.; Hong, J.-K. Comparative Performance Analysis of Vibration Prediction Using RNN Techniques. Electronics 2022, 11, 3619. [Google Scholar] [CrossRef]
- Yuan, B.; Ma, W.; Wang, F. High Speed Safe Autonomous Landing Marker Tracking of Fixed Wing Drone Based on Deep Learning. IEEE Access 2022, 10, 80415–80436. [Google Scholar] [CrossRef]
- Bektash, O.; Pedersen, J.N.; Ramirez Gomez, A.; la Cour-Harbo, A. Automated Emergency Landing System for Drones: SafeEYE Project. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1056–1064. [Google Scholar]
- Myeong, W.; Myung, H. Development of a Wall-Climbing Drone Capable of Vertical Soft Landing Using a Tilt-Rotor Mechanism. IEEE Access 2019, 7, 4868–4879. [Google Scholar] [CrossRef]
- Serrano, J.R.; Tiseira, A.O.; García-Cuevas, L.M.; Varela, P. Computational Study of the Propeller Position Effects in Wing-Mounted, Distributed Electric Propulsion with Boundary Layer Ingestion in a 25 Kg Remotely Piloted Aircraft. Drones 2021, 5, 56. [Google Scholar] [CrossRef]
- Hou, W.; Fang, T.; Pei, Z.; He, Q.-C. Integrated Design of Unmanned Aerial Mobility Network: A Data-Driven Risk-Averse Approach. Int. J. Prod. Econ. 2021, 236, 108131. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, Y.; Wen, Q.; Lin, H.; Chen, Y. Secure Drone Network Edge Service Architecture Guaranteed by DAG-Based Blockchain for Flying Automation under 5G. Sensors 2020, 20, 6209. [Google Scholar] [CrossRef]
- Ma, M.; Xu, Y.; Wang, Z.; Fu, X.; Gui, G. Decentralized Learning and Model Averaging Based Automatic Modulation Classification in Drone Communication Systems. Drones 2023, 7, 391. [Google Scholar] [CrossRef]
- Shukla, P.; Nasrin, S.; Darabi, N.; Gomes, W.; Trivedi, A.R. MC-CIM: Compute-in-Memory with Monte-Carlo Dropouts for Bayesian Edge Intelligence. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 884–896. [Google Scholar] [CrossRef]
- Westbrooke, V.; Lucock, X.; Greenhalgh, I. Drone Use in On-Farm Environmental Compliance: An Investigation of Regulators’ Perspectives. Sustainability 2023, 15, 2153. [Google Scholar] [CrossRef]
- Le Roy, F.; Roland, C.; Le Jeune, D.; Diguet, J.-P. Risk Assessment of SDR-Based Attacks with UAVs. In Proceedings of the 2019 16th International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland, 27–30 August 2019; pp. 222–226. [Google Scholar]
- Svatý, Z.; Nouzovský, L.; Mičunek, T.; Frydrýn, M. Evaluation of the Drone-Human Collision Consequences. Heliyon 2022, 8, e11677. [Google Scholar] [CrossRef]
- Zhu, R.; Yang, Z.; Chen, J. Conflict Risk Assessment between Non-Cooperative Drones and Manned Aircraft in Airport Terminal Areas. Appl. Sci. 2022, 12, 10377. [Google Scholar] [CrossRef]
- Uddin, Z.; Altaf, M.; Bilal, M.; Nkenyereye, L.; Bashir, A.K. Amateur Drones Detection: A Machine Learning Approach Utilizing the Acoustic Signals in the Presence of Strong Interference. Comput. Commun. 2020, 154, 236–245. [Google Scholar] [CrossRef]
- Morio, J.; Levasseur, B.; Bertrand, S. Drone Ground Impact Footprints with Importance Sampling: Estimation and Sensitivity Analysis. Appl. Sci. 2021, 11, 3871. [Google Scholar] [CrossRef]
- Jeelani, I.; Gheisari, M. Safety Challenges of UAV Integration in Construction: Conceptual Analysis and Future Research Roadmap. Saf. Sci. 2021, 144, 105473. [Google Scholar] [CrossRef]
- Ažaltovič, V.; Škvareková, I.; Pecho, P.; Kandera, B. Calculation of the Ground Casualty Risk during Aerial Work of Unmanned Aerial Vehicles in the Urban Environment. Transp. Res. Procedia 2020, 44, 271–275. [Google Scholar] [CrossRef]
- Ren, X.; Cheng, C. Model of Third-Party Risk Index for Unmanned Aerial Vehicle Delivery in Urban Environment. Sustainability 2020, 12, 8318. [Google Scholar] [CrossRef]
- Lercel, D.J.; Hupy, J.P. Exploring the Use of Geographic Information Systems to Identify Spatial Patterns of Remote UAS Pilots and Possible National Airspace Risk. Safety 2023, 9, 18. [Google Scholar] [CrossRef]
- Pascarella, D.; Gigante, G.; Vozella, A.; Bieber, P.; Dubot, T.; Martinavarro, E.; Barraco, G.; Li Calzi, G. A Methodological Framework for the Risk Assessment of Drone Intrusions in Airports. Aerospace 2022, 9, 747. [Google Scholar] [CrossRef]
- Frixione, M.G.; Salvadeo, C. Drones, Gulls and Urbanity: Interaction between New Technologies and Human Subsidized Species in Coastal Areas. Drones 2021, 5, 30. [Google Scholar] [CrossRef]
- Howell, L.G.; Allan, B.M.; Driscoll, D.A.; Ierodiaconou, D.; Doran, T.A.; Weston, M.A. Attenuation of Responses of Waterbirds to Repeat Drone Surveys Involving a Sequence of Altitudes and Drone Types: A Case Study. Drones 2023, 7, 497. [Google Scholar] [CrossRef]
- Lenzi, J.; Felege, C.J.; Newman, R.; McCann, B.; Ellis-Felege, S.N. Feral Horses and Bison at Theodore Roosevelt National Park (North Dakota, United States) Exhibit Shifts in Behaviors during Drone Flights. Drones 2022, 6, 136. [Google Scholar] [CrossRef]
- Sorrell, K.; Dawlings, F.; Mackay, C.; Clarke, R. Routine and Safe Operation of Remotely Piloted Aircraft Systems in Areas with High Densities of Flying Birds. Drones 2023, 7, 510. [Google Scholar] [CrossRef]
- Thomas, K.; Granberg, T.A. Quantifying Visual Pollution from Urban Air Mobility. Drones 2023, 7, 396. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, T.; Song, C.; Yu, X.; Shan, C.; Gu, H.; Lan, Y. Evaluation of Spray Drift of Plant Protection Drone Nozzles Based on Wind Tunnel Test. Agriculture 2023, 13, 628. [Google Scholar] [CrossRef]
- Aldaej, A.; Ahanger, T.A.; Atiquzzaman, M.; Ullah, I.; Yousufudin, M. Smart Cybersecurity Framework for IoT-Empowered Drones: Machine Learning Perspective. Sensors 2022, 22, 2630. [Google Scholar] [CrossRef]
- Alissa, K.A.; Alotaibi, S.S.; Alrayes, F.S.; Aljebreen, M.; Alazwari, S.; Alshahrani, H.; Ahmed Elfaki, M.; Othman, M.; Motwakel, A. Crystal Structure Optimization with Deep-Autoencoder-Based Intrusion Detection for Secure Internet of Drones Environment. Drones 2022, 6, 297. [Google Scholar] [CrossRef]
- Jacobsen, R.H.; Marandi, A. Security Threats Analysis of the Unmanned Aerial Vehicle System. In Proceedings of the 2021 IEEE Military Communications Conference (MILCOM), San Diego, CA, USA, 29 November–2 December 2021; pp. 316–322. [Google Scholar]
- Ahmed, M.; Cox, D.; Simpson, B.; Aloufi, A. ECU-IoFT: A Dataset for Analysing Cyber-Attacks on Internet of Flying Things. Appl. Sci. 2022, 12, 1990. [Google Scholar] [CrossRef]
- Westerlund, O.; Asif, R. Drone Hacking with Raspberry-Pi 3 and WiFi Pineapple: Security and Privacy Threats for the Internet-of-Things. In Proceedings of the 2019 1st International Conference on Unmanned Vehicle Systems-Oman (UVS), Muscat, Oman, 5–7 February 2019; pp. 1–10. [Google Scholar]
- Sontowski, S.; Gupta, M.; Laya Chukkapalli, S.S.; Abdelsalam, M.; Mittal, S.; Joshi, A.; Sandhu, R. Cyber Attacks on Smart Farming Infrastructure. In Proceedings of the 2020 IEEE 6th International Conference on Collaboration and Internet Computing (CIC), Atlanta, GA, USA, 1–3 December 2020; pp. 135–143. [Google Scholar]
- Satheesh Kumar, M.; Vimal, S.; Jhanjhi, N.Z.; Dhanabalan, S.S.; Alhumyani, H.A. Blockchain Based Peer to Peer Communication in Autonomous Drone Operation. Energy Rep. 2021, 7, 7925–7939. [Google Scholar] [CrossRef]
- Tanveer, M.; Khan, A.U.; Shah, H.; Chaudhry, S.A.; Naushad, A. PASKE-IoD: Privacy-Protecting Authenticated Key Establishment for Internet of Drones. IEEE Access 2021, 9, 145683–145698. [Google Scholar] [CrossRef]
- Hamadi, R.; Ghazzai, H.; Massoud, Y. Reinforcement Learning Based Intrusion Detection Systems for Drones: A Brief Survey. In Proceedings of the 2023 IEEE International Conference on Smart Mobility (SM), Thuwal, Saudi Arabia, 19–21 March 2023; pp. 104–109. [Google Scholar]
- Wu, M.; Zhu, Z.; Xia, Y.; Yan, Z.; Zhu, X.; Ye, N. A Q-Learning-Based Two-Layer Cooperative Intrusion Detection for Internet of Drones System. Drones 2023, 7, 502. [Google Scholar] [CrossRef]
- Lei, Y.; Zeng, L.; Li, Y.-X.; Wang, M.-X.; Qin, H. A Lightweight Authentication Protocol for UAV Networks Based on Security and Computational Resource Optimization. IEEE Access 2021, 9, 53769–53785. [Google Scholar] [CrossRef]
- Jahan, F.; Sun, W.; Niyaz, Q. A Non-Cooperative Game Based Model for the Cybersecurity of Autonomous Systems. In Proceedings of the 2020 IEEE Security and Privacy Workshops (SPW), San Francisco, CA, USA, 21 May 2020; pp. 202–207. [Google Scholar]
- Nalamati, M.; Kapoor, A.; Saqib, M.; Sharma, N.; Blumenstein, M. Drone Detection in Long-Range Surveillance Videos. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Taipei, Taiwan, 18–21 September 2019; pp. 1–6. [Google Scholar]
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Yang, J.; Gu, H.; Hu, C.; Zhang, X.; Gui, G.; Gacanin, H. Deep Complex-Valued Convolutional Neural Network for Drone Recognition Based on RF Fingerprinting. Drones 2022, 6, 374. [Google Scholar] [CrossRef]
- Sun, Y.; Zhi, X.; Han, H.; Jiang, S.; Shi, T.; Gong, J.; Zhang, W. Enhancing UAV Detection in Surveillance Camera Videos through Spatiotemporal Information and Optical Flow. Sensors 2023, 23, 6037. [Google Scholar] [CrossRef]
- Alam, S.S.; Chakma, A.; Rahman, M.H.; Bin Mofidul, R.; Alam, M.M.; Utama, I.B.K.Y.; Jang, Y.M. RF-Enabled Deep-Learning-Assisted Drone Detection and Identification: An End-to-End Approach. Sensors 2023, 23, 4202. [Google Scholar] [CrossRef]
- Ashush, N.; Greenberg, S.; Manor, E.; Ben-Shimol, Y. Unsupervised Drones Swarm Characterization Using RF Signals Analysis and Machine Learning Methods. Sensors 2023, 23, 1589. [Google Scholar] [CrossRef]
- Medaiyese, O.O.; Ezuma, M.; Lauf, A.P.; Adeniran, A.A. Hierarchical Learning Framework for UAV Detection and Identification. IEEE J. Radio Freq. Identif. 2022, 6, 176–188. [Google Scholar] [CrossRef]
- Ciaburro, G.; Iannace, G. Improving Smart Cities Safety Using Sound Events Detection Based on Deep Neural Network Algorithms. Informatics 2020, 7, 23. [Google Scholar] [CrossRef]
- Fan, Y.; Li, O.; Liu, G. An Object Detection Algorithm for Rotary-Wing UAV Based on AWin Transformer. IEEE Access 2022, 10, 13139–13150. [Google Scholar] [CrossRef]
- Yang, T.; Li, Z.; Zhang, F.; Xie, B.; Li, J.; Liu, L. Panoramic UAV Surveillance and Recycling System Based on Structure-Free Camera Array. IEEE Access 2019, 7, 25763–25778. [Google Scholar] [CrossRef]
- Davies, L.; Vagapov, Y.; Grout, V.; Cunningham, S.; Anuchin, A. Review of Air Traffic Management Systems for UAV Integration into Urban Airspace. In Proceedings of the 2021 28th International Workshop on Electric Drives: Improving Reliability of Electric Drives (IWED), Moscow, Russia, 27–29 January 2021; pp. 1–6. [Google Scholar]
- McCarthy, T.; Pforte, L.; Burke, R. Fundamental Elements of an Urban UTM. Aerospace 2020, 7, 85. [Google Scholar] [CrossRef]
- Yi, J.; Zhang, H.; Wang, F.; Ning, C.; Liu, H.; Zhong, G. An Operational Capacity Assessment Method for an Urban Low-Altitude Unmanned Aerial Vehicle Logistics Route Network. Drones 2023, 7, 582. [Google Scholar] [CrossRef]
- Martinez, C.; Sanchez-Cuevas, P.J.; Gerasimou, S.; Bera, A.; Olivares-Mendez, M.A. SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones 2021, 5, 141. [Google Scholar] [CrossRef]
- Sanjab, A.; Saad, W.; Basar, T. A Game of Drones: Cyber-Physical Security of Time-Critical UAV Applications with Cumulative Prospect Theory Perceptions and Valuations. IEEE Trans. Commun. 2020, 68, 6990–7006. [Google Scholar] [CrossRef]
- Ajakwe, S.O.; Ihekoronye, V.U.; Kim, D.-S.; Lee, J.-M. ALIEN: Assisted Learning Invasive Encroachment Neutralization for Secured Drone Transportation System. Sensors 2023, 23, 1233. [Google Scholar] [CrossRef]
- Allouch, A.; Koubaa, A.; Khalgui, M.; Abbes, T. Qualitative and Quantitative Risk Analysis and Safety Assessment of Unmanned Aerial Vehicles Missions Over the Internet. IEEE Access 2019, 7, 53392–53410. [Google Scholar] [CrossRef]
- Alharbi, A.; Poujade, A.; Malandrakis, K.; Petrunin, I.; Panagiotakopoulos, D.; Tsourdos, A. Rule-Based Conflict Management for Unmanned Traffic Management Scenarios. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–10. [Google Scholar]
- Minucci, F.; Vinogradov, E.; Pollin, S. Avoiding Collisions at Any (Low) Cost: ADS-B Like Position Broadcast for UAVs. IEEE Access 2020, 8, 121843–121857. [Google Scholar] [CrossRef]
- Pedro, D.; Matos-Carvalho, J.P.; Azevedo, F.; Sacoto-Martins, R.; Bernardo, L.; Campos, L.; Fonseca, J.M.; Mora, A. FFAU—Framework for Fully Autonomous UAVs. Remote Sens. 2020, 12, 3533. [Google Scholar] [CrossRef]
- Shan, L.; Li, H.-B.; Miura, R.; Matsuda, T.; Matsumura, T. A Novel Collision Avoidance Strategy with D2D Communications for UAV Systems. Drones 2023, 7, 283. [Google Scholar] [CrossRef]
- Zhang, N.; Liu, H.; Ng, B.F.; Low, K.H. Collision Probability between Intruding Drone and Commercial Aircraft in Airport Restricted Area Based on Collision-Course Trajectory Planning. Transp. Res. Part C Emerg. Technol. 2020, 120, 102736. [Google Scholar] [CrossRef]
- Campana, I.; Bergesio, L.; Besada, J.A.; de Miguel, G. Air Tracking and Monitoring for Unmanned Aircraft Traffic Management. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–9. [Google Scholar]
- Kuru, K.; Pinder, J.M.; Watkinson, B.J.; Ansell, D.; Vinning, K.; Moore, L.; Gilbert, C.; Sujit, A.; Jones, D. Toward Mid-Air Collision-Free Trajectory for Autonomous and Pilot-Controlled Unmanned Aerial Vehicles. IEEE Access 2023, 11, 100323–100342. [Google Scholar] [CrossRef]
- Vagal, V.; Markantonakis, K.; Shepherd, C. A New Approach to Complex Dynamic Geofencing for Unmanned Aerial Vehicles. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–7. [Google Scholar]
- Silalahi, S.; Ahmad, T.; Studiawan, H. Transformer-Based Named Entity Recognition on Drone Flight Logs to Support Forensic Investigation. IEEE Access 2023, 11, 3257–3274. [Google Scholar] [CrossRef]
- Covaciu, F.; Iordan, A.-E. Control of a Drone in Virtual Reality Using MEMS Sensor Technology and Machine Learning. Micromachines 2022, 13, 521. [Google Scholar] [CrossRef]
- Koç, D.; Seçkin, A.Ç.; Satı, Z.E. Evaluation of Participant Success in Gamified Drone Training Simulator Using Brain Signals and Key Logs. Brain Sci. 2021, 11, 1024. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Huang, C. Smart Data-Driven Policy on Unmanned Aircraft Systems (UAS): Analysis of Drone Users in U.S. Cities. Smart Cities 2021, 4, 78–92. [Google Scholar] [CrossRef]
- Henderson, I.L. Examining New Zealand Unmanned Aircraft Users’ Measures for Mitigating Operational Risks. Drones 2022, 6, 32. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Gómez Comendador, F.; Cardenas-Soria, A.B.; Janisch, D.; Arnaldo Valdés, R.M. Identification, Categorisation and Gaps of Safety Indicators for U-Space. Energies 2020, 13, 608. [Google Scholar] [CrossRef]
- Kim, J.J.; Kim, I.; Hwang, J. A Change of Perceived Innovativeness for Contactless Food Delivery Services Using Drones after the Outbreak of COVID-19. Int. J. Hosp. Manag. 2021, 93, 102758. [Google Scholar] [CrossRef] [PubMed]
- Valencia-Arias, A.; Rodríguez-Correa, P.A.; Patiño-Vanegas, J.C.; Benjumea-Arias, M.; De La Cruz-Vargas, J.; Moreno-López, G. Factors Associated with the Adoption of Drones for Product Delivery in the Context of the COVID-19 Pandemic in Medellín, Colombia. Drones 2022, 6, 225. [Google Scholar] [CrossRef]
- Cawthorne, D.; Devos, A. Capability Caution in UAV Design. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1572–1581. [Google Scholar]
- Kim, K. User Preferences in Drone Design and Operation. Drones 2022, 6, 133. [Google Scholar] [CrossRef]
- Del-Real, C.; Díaz-Fernández, A.M. Lifeguards in the Sky: Examining the Public Acceptance of Beach-Rescue Drones. Technol. Soc. 2021, 64, 101502. [Google Scholar] [CrossRef]
- Pheh, Y.H.; Kyi Hla Win, S.; Foong, S. Spherical Indoor Coandă Effect Drone (SpICED): A Spherical Blimp SUAS for Safe Indoor Use. Drones 2022, 6, 260. [Google Scholar] [CrossRef]
- Singletary, A.; Swann, A.; Chen, Y.; Ames, A.D. Onboard Safety Guarantees for Racing Drones: High-Speed Geofencing with Control Barrier Functions. IEEE Robot. Autom. Lett. 2022, 7, 2897–2904. [Google Scholar] [CrossRef]
- Gluck, T.; Kravchik, M.; Chocron, S.; Elovici, Y.; Shabtai, A. Spoofing Attack on Ultrasonic Distance Sensors Using a Continuous Signal. Sensors 2020, 20, 6157. [Google Scholar] [CrossRef]
- Borowik, G.; Kożdoń-Dębecka, M.; Strzelecki, S. Mutable Observation Used by Television Drone Pilots: Efficiency of Aerial Filming Regarding the Quality of Completed Shots. Electronics 2022, 11, 3881. [Google Scholar] [CrossRef]
- Alamouri, A.; Lampert, A.; Gerke, M. An Exploratory Investigation of UAS Regulations in Europe and the Impact on Effective Use and Economic Potential. Drones 2021, 5, 63. [Google Scholar] [CrossRef]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E. Research Trends in Collaborative Drones. Sensors 2022, 22, 3321. [Google Scholar] [CrossRef] [PubMed]
- Öz, E.; Heikkilä, E.; Tiusanen, R. Development of an Organisational Certification Process for Specific Category Drone Operations. Drones 2022, 6, 278. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Trend | Scope of the Analysed Literature | Publications |
|---|---|---|
| Drone application in the selected area | Mining industry | [6] |
| Logistics | [7] | |
| Last-mile delivery | [8,9] | |
| Smart city | [10] | |
| Road traffic monitoring system | [11,12] | |
| Marine animal research | [13] | |
| Shark science | [14] | |
| Clinical microbiology and infectious diseases | [15] | |
| Healthcare | [16,17,18] | |
| Agriculture | [19] | |
| Medical products and transportation | [20] | |
| Architecture, engineering, and construction industry | [21,22] | |
| Animal behaviour research | [23] | |
| Disaster management | [24] | |
| Drone operation | Detection | [25,26,27] |
| Social acceptance | [28,29] | |
| Routing and scheduling problem | [30,31,32,33,34] |
| Source Title | Number of Documents | % |
|---|---|---|
| Drones | 52 | 20% |
| IEEE Access | 20 | 8% |
| Sensors | 19 | 7% |
| Applied Sciences-Basel | 15 | 6% |
| Remote Sensing | 14 | 5% |
| Sustainability | 13 | 5% |
| Others | 124 | 48% |
| Research Area | Number of Documents |
|---|---|
| Engineering | 107 |
| Remote Sensing | 69 |
| Computer Science | 47 |
| Environmental Sciences and Ecology | 44 |
| Chemistry | 35 |
| Telecommunications | 30 |
| Instruments and Instrumentation | 24 |
| Physics | 22 |
| Science and Technology—Other Topics | 22 |
| Geology | 17 |
| Imaging Science and Photographic Technology | 17 |
| Materials Science | 16 |
| Robotics | 10 |
| Authors, Document Title | Times Cited |
|---|---|
| Outay, F; Mengash, HA; Adnan, M | 116 |
| Applications of unmanned aerial vehicle (UAV) in road safety, traffic, and highway infrastructure management: Recent advances and challenges [38] | |
| Shen, Y; Guo, DJ; Long, F; Mateos, LA; Ding, HZ; Xiu, Z; Hellman, RB; King, A; Chen, SX; Zhang, CK; Tan, H | 93 |
| Robots under COVID-19 pandemic: A comprehensive survey [39] | |
| Shamsoshoara, A; Afghah, F; Razi, A; Zheng, L; Fulé, PZ; Blasch, E | 71 |
| Aerial imagery pile burn detection using deep learning: The FLAME dataset [40] | |
| Wang, J; Liu, YX; Song, HB | 71 |
| Counter-unmanned aircraft system(s) (C-UAS): State-of-the-art, challenges, and future trends [41] | |
| Shayea, I; Ergen, M; Azmi, MH; Çolak, SA; Nordin, R; Daradkeh, YI | 70 |
| Key challenges, drivers and solutions for mobility management in 5G networks: A survey [42] | |
| Annis, A; Nardi, F; Petroselli, A; Apollonio, C; Arcangeletti, E; Tauro, F; Belli, C; Bianconi, R; Grimaldi, S | 64 |
| UAV-DEMs for small-scale flood hazard mapping [43] | |
| Tarolli, P; Straffelini, E | 59 |
| Agriculture in hilly and mountainous landscapes: Threats, monitoring and sustainable management [44] |
| Basic Category | Subcategories | Eligible Publications |
|---|---|---|
| Monitoring | Agriculture | [45,46,47,48,49,50,51] |
| Natural disasters | [40,43,52,53,54,55,56,57,58,59] | |
| Landscape | [44,60,61,62,63,64,65,66,67,68,69,70] | |
| People | [71,72] | |
| Animals and birds | [73,74,75,76] | |
| Plants | [77,78,79,80,81,82] | |
| Insects | [83,84,85] | |
| Vehicle traffic | [38,86,87,88,89,90,91,92] | |
| Water environment | [93,94,95,96,97,98,99,100,101,102,103] | |
| Infrastructure | [104,105,106,107,108] | |
| Emission of pollution | [109,110,111,112,113,114,115,116] | |
| Landslides | [117,118,119,120,121,122,123,124,125] | |
| Inspection | [38,126,127,128,129,130,131,132,133,134,135,136] | |
| Other | [137,138,139,140,141,142] | |
| Other applications of drones | Rapid response operations | [39,113,143,144,145,146,147,148,149,150,151,152,153,154,155,156,157,158,159,160,161,162,163,164] |
| Transport | [143,144,145,146,147,148,149,150,152,153,160,165,166,167,168,169,170,171,172,173,174,175,176] | |
| Other applications | [42,177,178,179,180,181,182,183,184,185,186,187] | |
| Technology development related to the operation of drones | [67,94,143,152,154,156,162,163,188,189,190,191,192,193,194,195,196,197,198,199,200,201,202,203,204,205,206,207,208,209,210,211,212,213,214,215,216,217,218,219,220,221,222] | |
| Drones as a source of risk | [223,224,225,226,227,228,229,230,231,232,233,234,235,236,237,238] | |
| Cybersecurity | [239,240,241,242,243,244,245,246,247,248,249,250] | |
| Preventive activities against the risks associated with drones | [41,251,252,253,254,255,256,257,258,259,260,261,262,263,264,265,266,267,268,269,270,271,272,273,274,275,276,277,278,279,280,281] | |
| Opinion survey | [160,165,167,168,170,171,282,283,284,285,286] | |
| Other | [287,288,289,290,291,292,293] |
| Research Subcategory | Research Area | Publications |
|---|---|---|
| Agriculture | Monitoring farmland for decision-making purposes | Cranberries [45] Grass seed [46] Wheat [47] |
| Monitoring meteorological variables (temperature, humidity) | Identification of irrigation needs [48] Variables affecting the nutritional value of rice [49] | |
| Assessment of field damage caused by animals | [43] | |
| Increasing productivity and food safety | [51] | |
| Natural disasters | Identifying areas at risk and monitoring the occurrence and spread of flood | [43,52,53,54,55,56] |
| Identifying areas at risk and monitoring the occurrence and spread of fire | [51,52,53] | |
| Monitoring the generation of destructive primary lahars responsible for the volcanic eruption | [59] | |
| Landscape | Monitoring the factors responsible for coastal changes | [62] |
| Morphological and topographical changes in coastal areas | [60,61,70] | |
| Monitoring of permafrost | [63] | |
| Monitoring and 3D modelling of endangered areas | [64,65] | |
| Gathering spatial information about the landscape | [66] | |
| Distribution of magnetic minerals in the subsurface | [69] | |
| Decision support for ecosystem interventions | [44] | |
| Detection of hazardous obstacles in unstructured terrain environments | [68] | |
| People | Monitoring of sports events | [71] |
| Moving people exposed to radiation | [72] | |
| Animals and birds | Detecting bird droppings | [73,74] |
| Conducting a census of a selected animal or bird species | [75,76] | |
| Plants | Surveying the vegetation of a selected area | [77,78,79] |
| Assessing the state of vegetation destruction in a selected area | [80,81] | |
| Determination of understory composition | [82] | |
| Insects | Monitoring of insects inhabiting wetlands | [85] |
| Identification of breeding sites of virus-spreading insects | [83,84] | |
| Vehicle traffic | Monitoring marine traffic of ships | [92] |
| Measurement of speed and behaviour of car drivers, monitoring of traffic volume | [38,86,87,88,89,91] | |
| Monitoring the driving and dangerous behaviour of cyclists | [90] | |
| Water environment | Sampling and testing of waters | [93,94,95,96] |
| Studying the behaviour of sea creatures | [97] | |
| Ocean observation to model tropical cyclones | [98] | |
| Monitoring for shark warnings | [99] | |
| Mapping the distribution of vegetation that provides habitat for sea creatures | [100] | |
| Monitoring reefs and factors affecting seaweed growth | [101] | |
| Monitoring critical phenomena to support the management of aquaculture farms | [102] | |
| Spatial modelling of salt marshes | [103] | |
| Infrastructure | Three-dimensional mapping of selected infrastructure facilities | [106] |
| Condition monitoring of transmission networks | [104,105] | |
| Assessment of the thermal quality of buildings | [107] | |
| Identification of traces of historical objects | [108] | |
| Emission of pollution | Emission of selected chemical compounds during forest burning | [109] |
| Monitoring of air pollution in a selected area | [115,116] | |
| Measurement of radiological contamination, monitoring of radiation distribution | [110,111] | |
| Identification of areas where diffuse pollution from agriculture occurs | [112] | |
| Dispersion of volatile chemicals | [113] | |
| Mapping of soil contamination | [114] | |
| Landslides | Survey of open pit mine slopes | [122] |
| Creating landslide maps for risk assessment | [117,118,119,120,121] | |
| Monitoring of landslides of rubble and rocks | [123,124] | |
| Detecting cracks in retaining walls | [125] | |
| Inspection | Conducting inspections of unburied land pipelines | [127] |
| Identifying corrosion in industrial structures such as telecommunications towers and wind farms | [129,130] | |
| Conducting inspections of safety-critical infrastructure | [131] | |
| Tracking construction progress | [132,133] | |
| Inspecting terrain for unexploded ordnance and landmines | [134,135] | |
| Inspecting bridge and road infrastructure | [38,136] | |
| Other | Detection of asbestos roof slates | [137] |
| Investigation of orphaned wells | [138] | |
| Snowpack depth, density, and stratigraphy study | [139] | |
| Land management | [140] | |
| Improvement of terrestrial wireless cellular networks | [141] | |
| Fracture distribution and orientation in outcrops | [142] |
| Source of Risk | Characteristics | Publication |
|---|---|---|
| Damage to the drone | Engine damage affects flight safety, the surroundings, and the drone’s functionality. There is a possibility of an unplanned impact on the ground. | [227] |
| Performing missions in a space shared with people and other objects | The possibility of collisions due to changes in the drone’s flight path is caused by difficult weather conditions, in a construction environment where people and machines work among many permanent and temporary structures. | [228] |
| Urban areas where the terrain is diverse and there is a high population density. | [229,230] | |
| Performing missions near the airport | Risk of collision with other flying objects. | [225,231,232] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tubis, A.A.; Poturaj, H.; Dereń, K.; Żurek, A. Risks of Drone Use in Light of Literature Studies. Sensors 2024, 24, 1205. https://doi.org/10.3390/s24041205
Tubis AA, Poturaj H, Dereń K, Żurek A. Risks of Drone Use in Light of Literature Studies. Sensors. 2024; 24(4):1205. https://doi.org/10.3390/s24041205
Chicago/Turabian StyleTubis, Agnieszka A., Honorata Poturaj, Klaudia Dereń, and Arkadiusz Żurek. 2024. "Risks of Drone Use in Light of Literature Studies" Sensors 24, no. 4: 1205. https://doi.org/10.3390/s24041205
APA StyleTubis, A. A., Poturaj, H., Dereń, K., & Żurek, A. (2024). Risks of Drone Use in Light of Literature Studies. Sensors, 24(4), 1205. https://doi.org/10.3390/s24041205