
Identification of Panoramic Photographic Image Composition Using Fuzzy Rules †

Abstract
1. Introduction
2. Related Works
3. Proposed Scheme
3.1. Photographic Composition of the Panoramic Image
- (1)
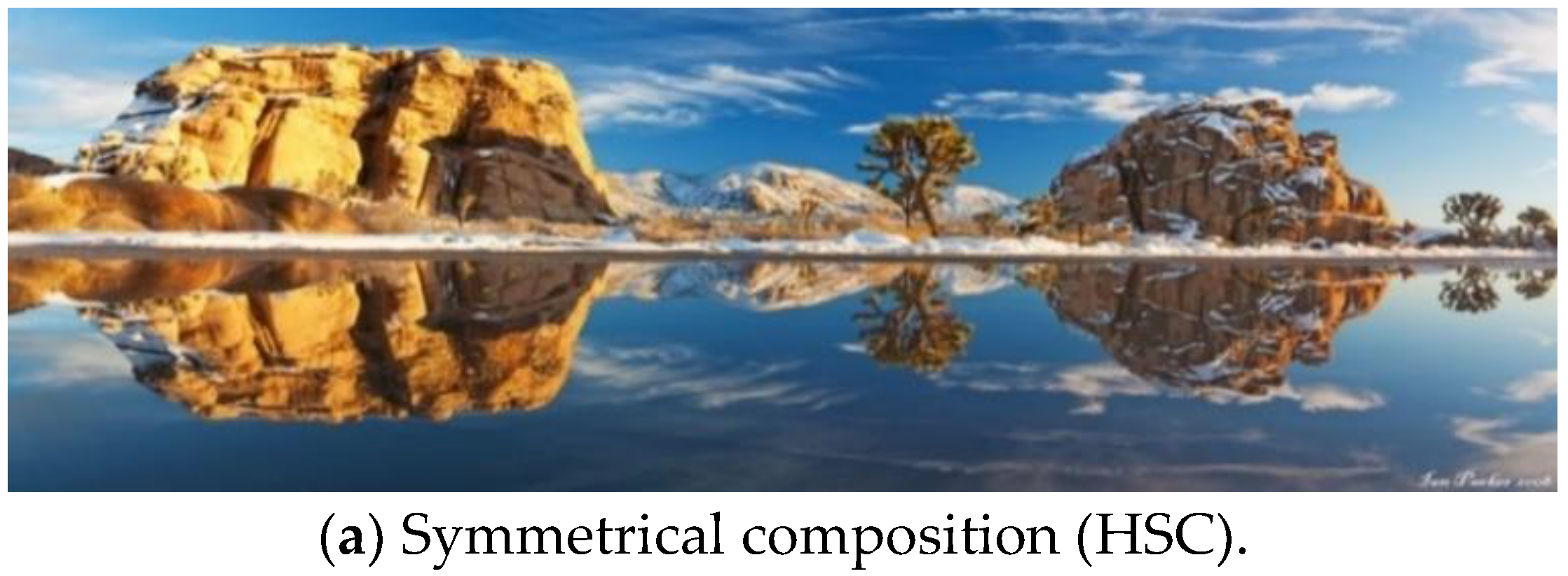
- Horizontal Symmetrical Composition (HSC)
- (2)
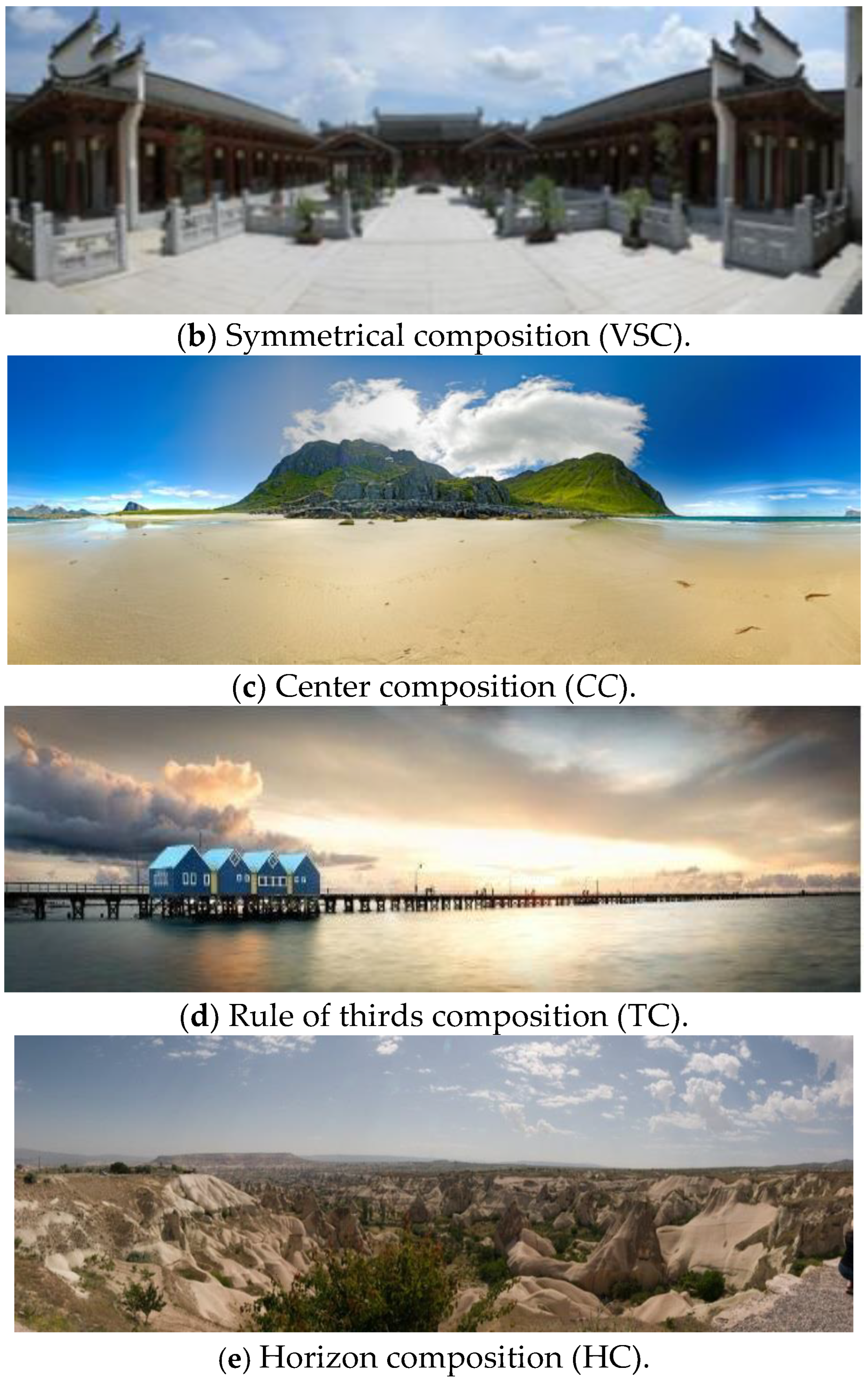
- The symmetrical composition of the traditional image usually employs mirrors, water, or metal materials to generate the reflected image. There is always a horizontal or a vertical line to divide the photo into two parts, showing a symmetrical image. Therefore, this arrangement will highlight the main subject and achieve the visual balance of the photo. However, due to a wider viewing angle, the reflected surface in the panoramic image is frequently the water, i.e., lake or river, which can provide a relatively more significant reflected effect as illustrated in Figure 1a. Vertical Symmetrical Composition (VSC)Instead of using a horizontal line to divide the photo into two parts, another composition type called Vertical Symmetrical Composition (VSC) adopts a virtual vertical line to show a symmetrical image, which is shown in Figure 1b as an example. This virtual vertical line is usually formed by natural or artificial objects.
- (3)
- Center Composition (CC)In traditional photography, the main subject is often placed in the image center, which can achieve the visual effect of emphasizing the main subject. This composition type is called the center or sun-like composition, as shown in Figure 1c. However, because the shape of the panoramic image is a long and narrow rectangle, it is hard to generate the same CC effect as a traditional photo. Therefore, apart from placing the main subject in the center of the panoramic image, the brightness and the color around the main subject should have high contrast to that of the main subject.
- (4)
- Rule of Thirds Composition (TC)Rule of thirds is one of the most recognizable compositions in traditional photography. Firstly, along the horizontal or the vertical direction, the photo is divided into three equal parts by two vertical or horizontal lines. By using those four lines, the whole photo is divided into nine regions. Placing the main subject at one of those four intersection points can attract the viewer’s attention, as displayed in Figure 1d. Because the split ratio is closest to the golden ratio (1:0.618), TC is also called the golden mean composition. Given the elongated and narrow shape of panoramic images, TC proves unsuitable unless the primary subject aligns with the two vertical lines. Highlighting the main subject necessitates two conditions: (1) enhancing the brightness and color contrast around the main subject, like the CC and (2) minimizing the presence of multiple objects within the image to the greatest extent possible.
- (5)
- Horizon Composition (HC)When the photographer takes a panoramic image, the camera is smoothly moved to capture the scene and the whole image is created by seamlessly stitching all sequential frames. Therefore, a horizontal line is easy to show in the image. Horizontal lines can demonstrate a stable and peaceful effect that often applies in the panoramic landscape image shown in Figure 1e. Such a photographic composition usually arranges the sky with the sea or the land to generate a horizontal line dividing the image into two regions. Hence, the apparent skyline or the horizon appears in the panoramic image as a significant characteristic of the HC. The horizontal line will be even more apparent when those two regions possess uniform color and relatively high contrast. In typical cases, the sky is placed above the horizon so that the blue color component in this region is higher than the bottom region.
3.2. Feature-Based Photographic Composition
- (1)
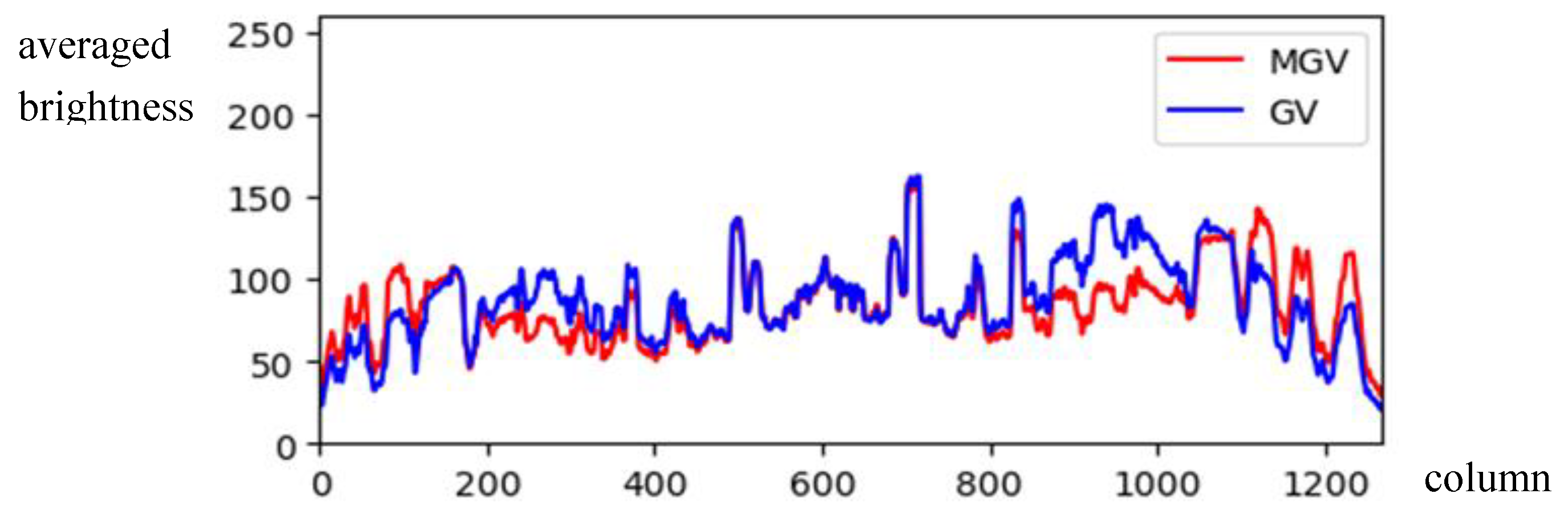
- The Global SymmetryThe main characteristic of symmetrical composition in the panoramic image is that both the left and right (or top and bottom) areas have similar content. Hence, this feature is adopted to determine the symmetrical composition for panoramic images. The symmetry property can also be calculated by those two areas yielding the same distribution of pixel values. Let be a panoramic image in which W and H are the width and height of I. At first, two statistical histograms are individually generated by averaging the pixel values of I along each column and each row. Therefore, those two histograms equal the vertical and the horizontal projections for I. Because messy scenes typically appear at two ends of the panoramic image that affect photo composition, we only take the projection range from H/6 to 5H/6 along the vertical direction and from 3W/10 to 7W/10 along the horizontal direction of the image. Therefore, the two histograms of GV(x) and GH(y) can be calculated byandFor a panoramic image, the histogram GH (or GV) will show an asymmetrical shape at the center that illustrates the similarity between the top and the bottom (or the left and the right) areas with horizontal (or vertical) symmetry. However, because the panoramic image contains expansive scenery (even with a 360-degree view), various brightness results in significant contrast appearing in different parts of the panoramic image. For example, the sunlight appearing on the left side of the image gives the right side a darker brightness, changing the histogram’s symmetry. Therefore, brightness compensation is essential for avoiding the wrong decision on symmetry in the whole panoramic image. The techniques of brightness compensation can be divided into two cases:
- (a)
- The image with vertical symmetry: Because the sun generally appears in the top area of the image, we only consider the top area’s illumination distribution, which can provide the distribution of the pixel values for the whole image. Hence, a new vertical projection for the upper H/3 region of the image is estimated byTaking the image in Figure 1b used to calculate GV(x) and GH(y) again; the obtained BV(x) is shown in Figure 3 and the brightness average of BV is given byFigure 3 depicts the histogram of an image with vertical symmetry in which sunlight appears on the two sides. Therefore, the histogram in these locations has higher pixel values than the other part. For compensating the illumination difference, the brightness weighting function can be obtained by
- (b)
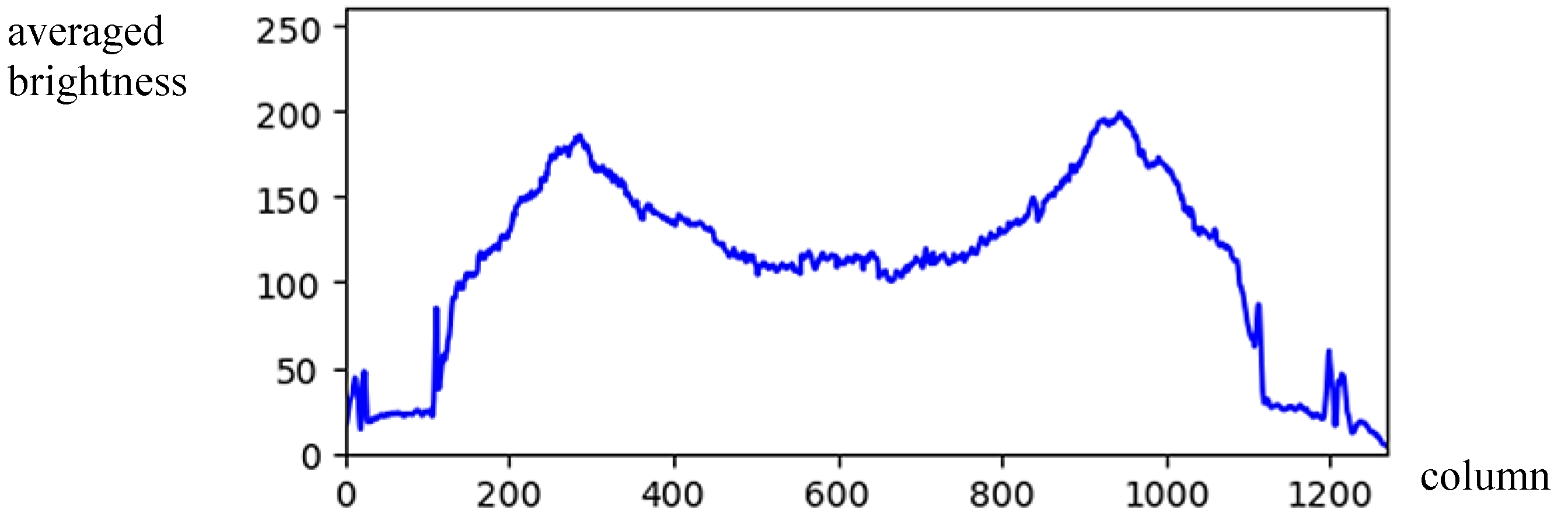
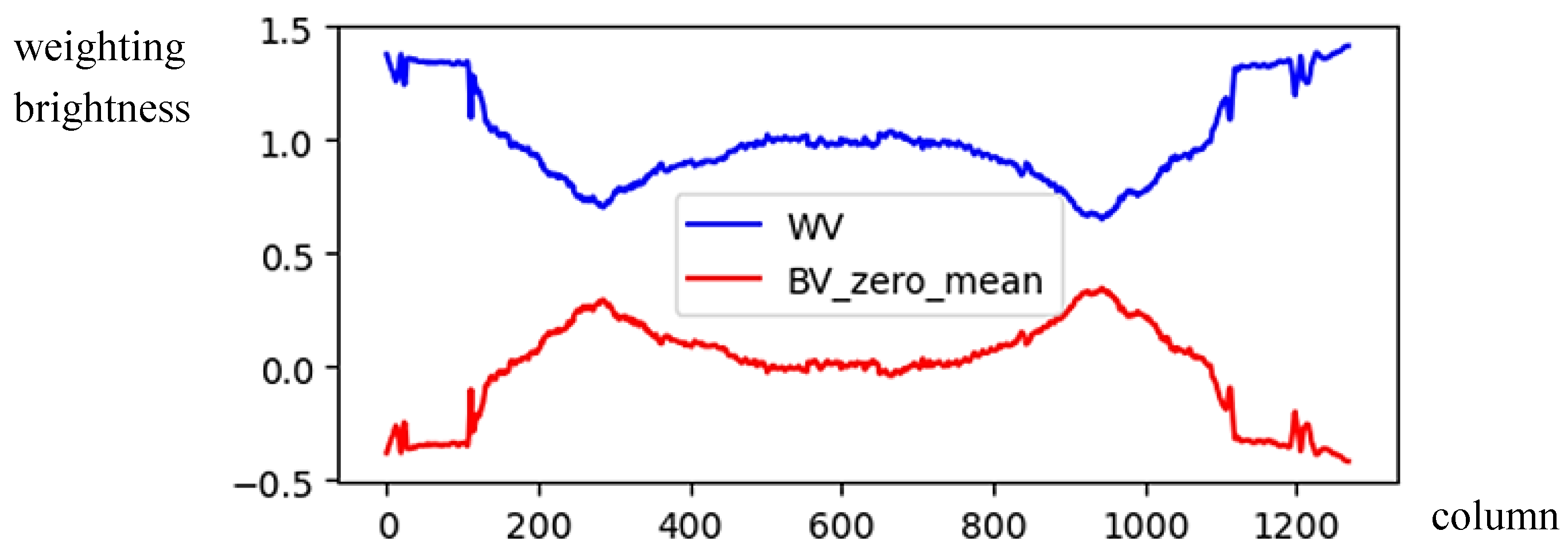
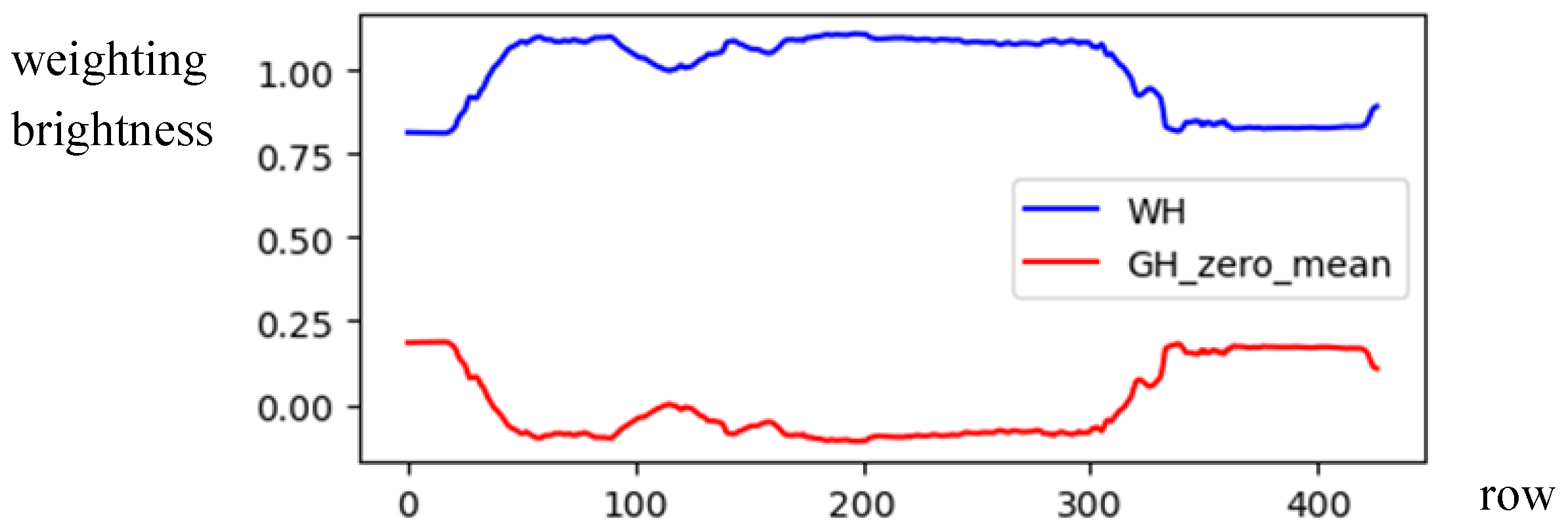
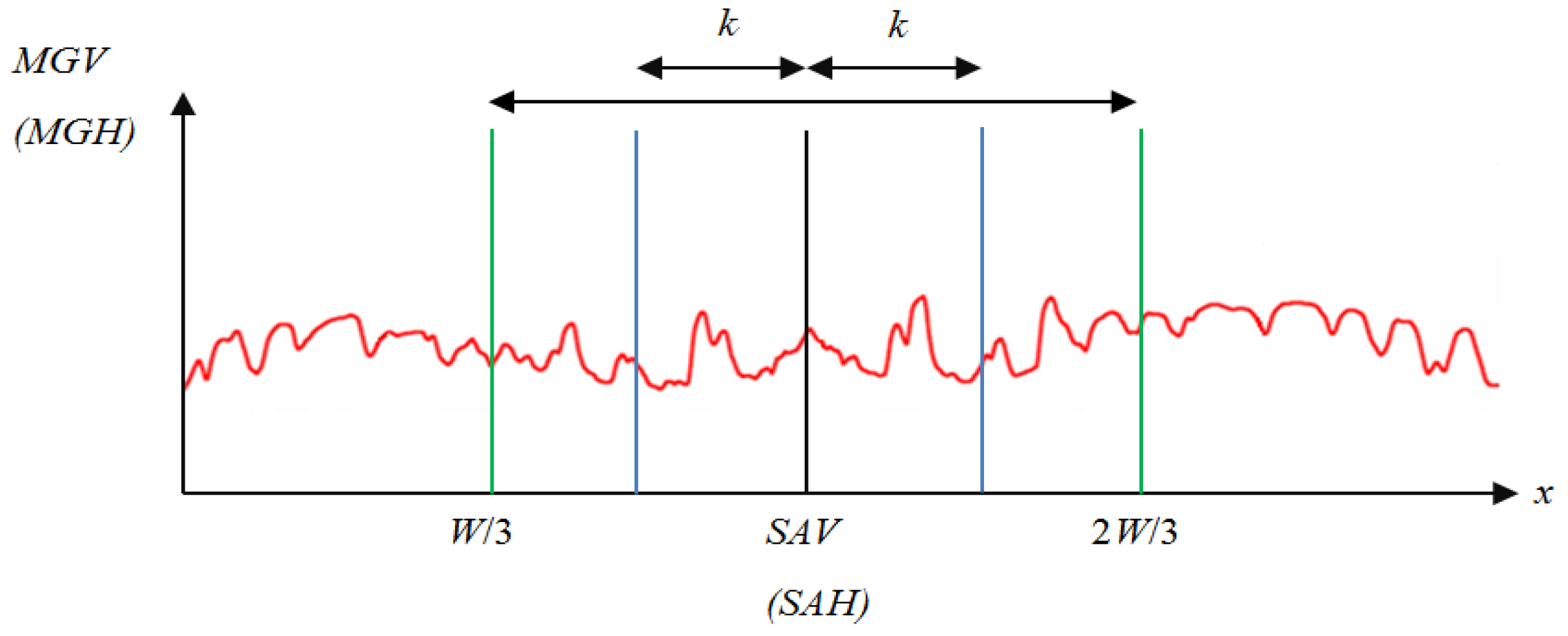
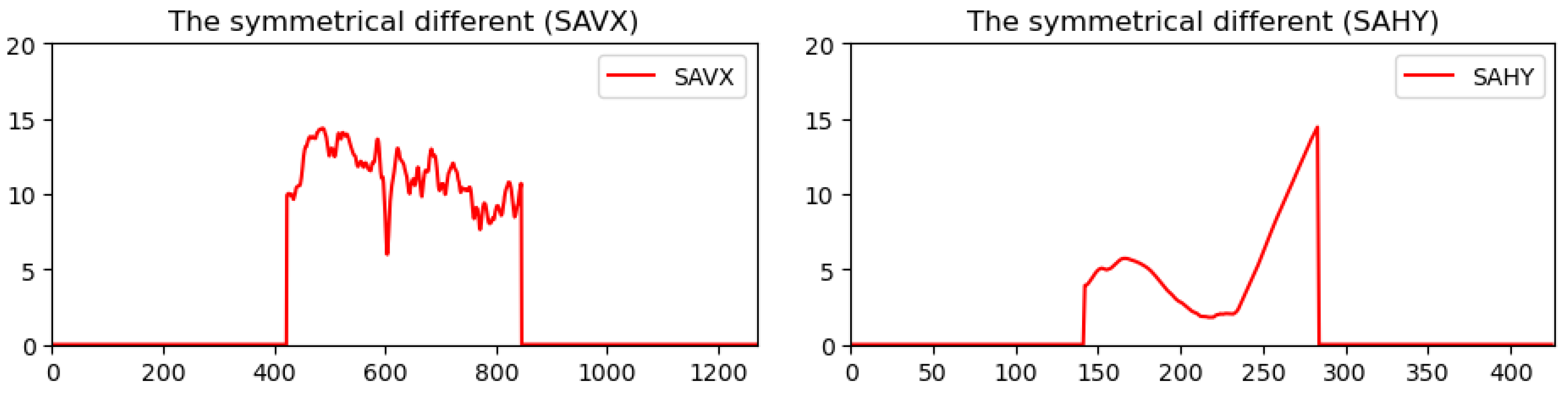
- The image with horizontal symmetry: In this case, the light source, i.e., the sun, may appear anywhere in the top image region (above the horizontal level). Therefore, we only need to use the horizontal brightness distribution (i.e., GH) in the center part of the image to depict the illumination distribution of each column. The average value of the GH is computed byand the brightness weighting function WH(y) based on the horizontal projection GH can be given byAs shown in Figure 6, the brightness weighting function WH(y) is drawn by a blue line. Like the case of vertical symmetry, the compensated histogram GV is written asBy comparing GH(y) and MGH(y) in Figure 7 for Figure 1b, the illumination GH(H) was compensated by the brightness weighting function WH(y), showing clearer horizontal symmetry in MGH(y).For an image with asymmetrical composition, the symmetrical axis is usually arranged in the center column (or the center row ), and this is difficult for the photographer when he faces a panoramic scene. However, locating the accurate symmetrical axis from the panoramic image is essential for identifying the photographic composition. To address this issue, the modified brightness histogram MGV (or MGH) was adopted to compute the symmetrical difference across both sides of the histogram. The sliding window’s width was also configured to be 2k, as illustrated in Figure 8. To reduce the computation time, the range to search the position with the minimum value among symmetrical difference values was shrunk to a smaller area between W/3 and 2W/3 (or between H/3 and 2H/3).For the case of vertical (or horizontal) symmetric composition, the accurate position of the symmetric axis, denoted by SAV (or SAH), can be obtained by selecting the minimum value among symmetrical difference values defined byFigure 9 shows two histograms corresponding to the symmetry measurements of SAVX and SAHY. We can find an apparent valley near column 600 in the SAVX curve indicating Figure 2 has a symmetrical axis and its location. In the SAHY curve, we can also find a valley near row 225 that shows a symmetrical axis and its location in Figure 2.
- (2)
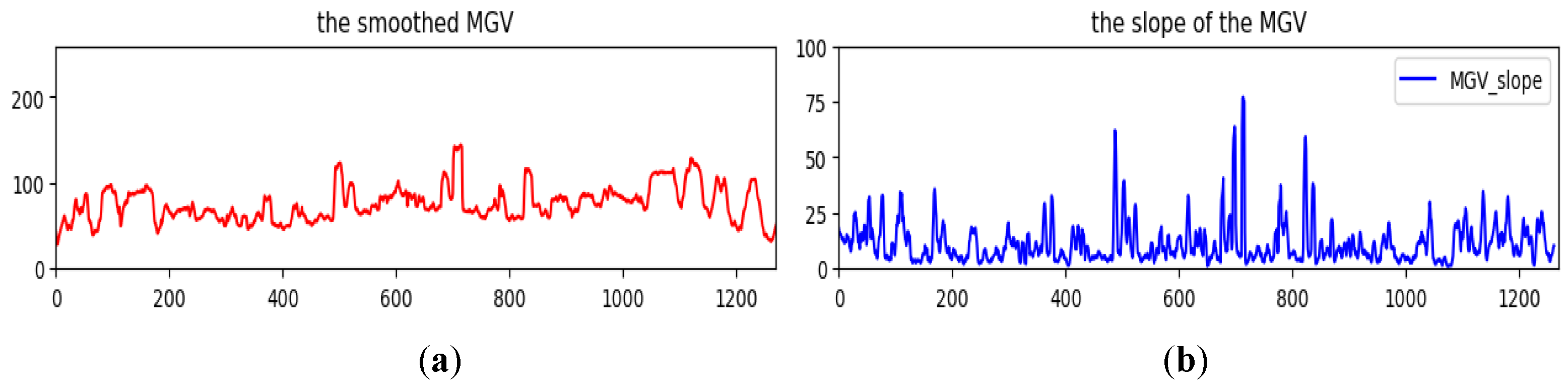
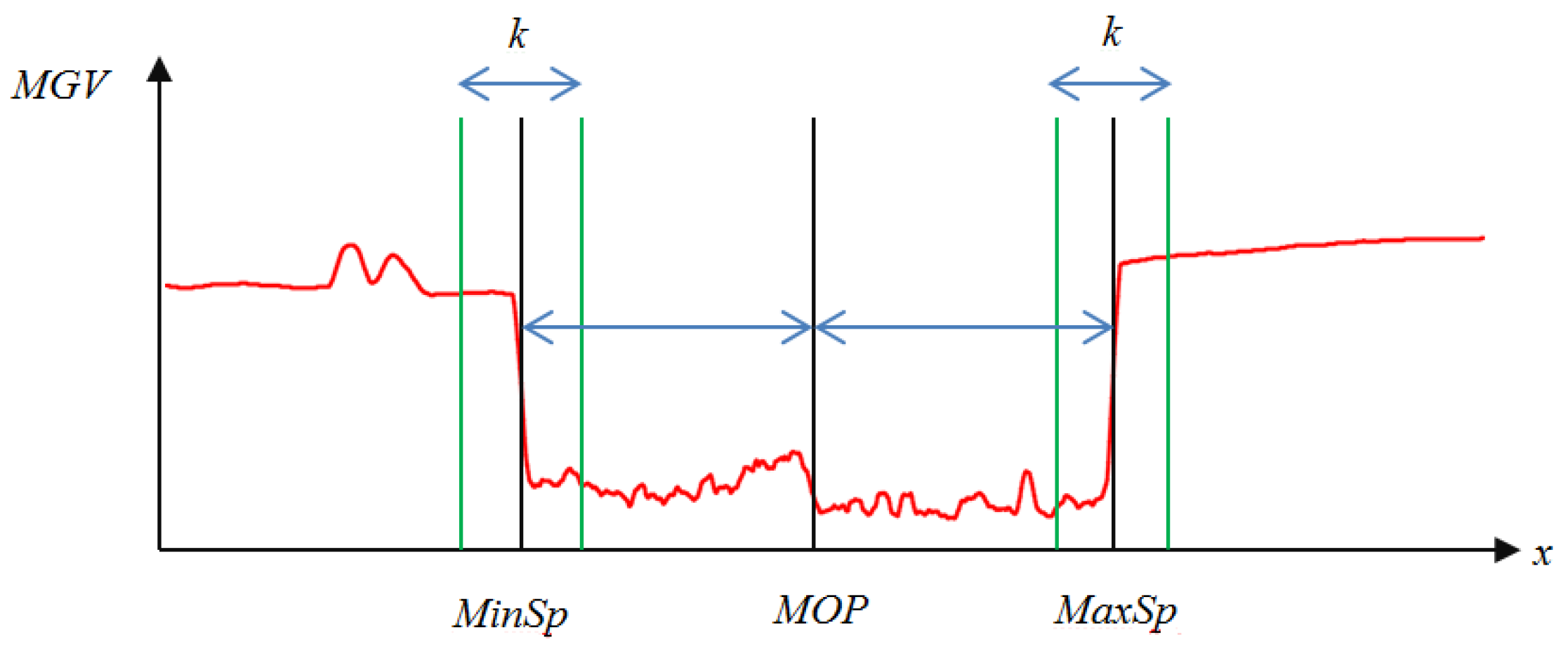
- The Local SaliencyFor some suitable compositions, the main subject is placed in a specific photo location to emphasize the main subject. Hence, the region’s content, including the main subject, usually demonstrates significant differences in pixel value distribution from other regions. Furthermore, because the viewer’s angle of view usually follows the horizontal direction for a panoramic image, the main subject’s position is better arranged on the horizontal axis of the image. Therefore, in the vertical projection histogram, two neighboring regions in addition to the main subject will result in two abrupt brightness changes. The histogram MGV(x) is further modified to extract the salient part from the image. After a smoothing processing to reduce the ripple effect along the MGV curve, two positions (MinSp and MaxSp) with the minimum and the maximum slopes can be calculated by k = 5. The equations of MinSp and MaxSp are given byTaking the MGV in Figure 5 for further processing; the smoothed MGV is shown in Figure 10a, and the corresponding slope of the MGV is shown in Figure 10b. The midpoints of MinSp and MaxSp are denoted by MOP, as shown in Figure 11. Moreover, the corresponding cumulated slope related to k is expressed as k = 5. The calculations of MinSp, MaxSp, and MOP are defined byAlso, the total difference (TDS) between the salient region and the neighboring regions can be measured byIn general, if the main object is arranged in the center (W/2) of the image, we call it the Central Composition (CC). In addition, one-third and two-thirds of composition methods locate the main object at W/3 and 2W/3 of the image. For estimating the consistency between the main subject location and the composition rule, the calculation of the location gap LG is given bywhere SL is the specific location based on the composition rule. For example, the SL is W/2 for the CC rule and W/3 or 2W/3 for the TC1 and TC2 rules, respectively. Figure 12 demonstrates an example for calculating the location of the main subject from the slope of the MGV. We can find a coupe pulse in the curve of the slope of the MGV that indicates incidents of an apparent object at the range of column 637 to column 669.
- (3)
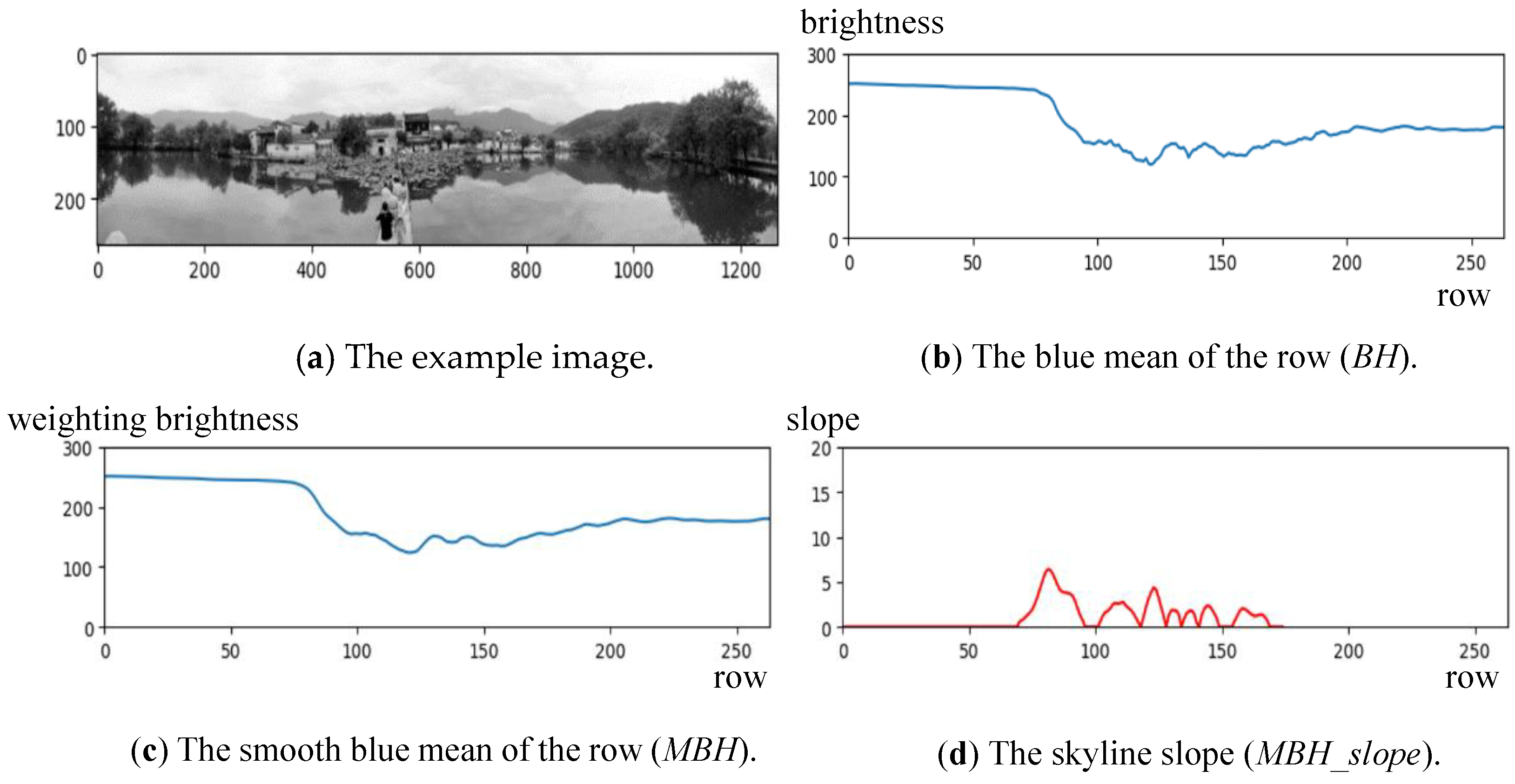
- The Horizontal linearityAn apparent (vertical or horizontal) line appears in the panoramic image for some compositions. For example, a horizontal line with a distinct difference between two sides often appears in the image center of the horizon composition. In addition, in the top area of the horizon, i.e., sky or cloud, the color frequently shows a satiated blue or bright white. Based on this characteristic, the B-channel of the color image is adopted to extract those lines from the panoramic image. Let the intensity image from the B-channel be . A histogram BH representing the average pixel values of each row can be produced.Furthermore, as shown in Figure 7, the smoothed histogram MBH generated from the histogram BH can be made to remove the noise. Using MBH, the skyline can be found with a high slope change in the histogram. The possible skyline can be found byPlease note that the skyline or horizon location is limited between H/3 and 2H/3 to match the actual case. Figure 13 shows the possible skyline PL in the MBH(y) histogram, and Figure 14 demonstrates an example for calculating the skyline position near row 78.Moreover, the matching degree of the found skyline to the horizontal direction needs to be checked. An excellent panoramic image with a horizon composition will have a horizontal line to divide the image to provide a balanced vision. When the found line is not horizontal, the locations with the most significant intensity change in each column will differ. Let the most significant change in each column be CV(x), W/3 < x < 2W/3; the standard deviation of CV can be computed byA small SDL value represents that the found line is nearly horizontal.
- (4)
- The Texture ComplexityIn a panoramic image, uniform color or texture appears in certain regions, i.e., sky, cloud, and sea, generating esthetically pleasing images. Also, the contrast between the texture and uniform regions is needed for images. For photographic composition, three types of combinations between the uniform and the texture regions are described:
- (a)
- The uniform region: To avoid a uniform region being mistaken as having good symmetry, two features are defined to measure the texture complexity of the image and assist in SC’s decision. Based on the histogram MGV (or MGH), the corresponding standard deviation SDGV (or SDGH) is computed byand
- (b)
- The uniform regions surrounding the texture region: Under the case of SC, the main subject appears in the image center, and the surrounding regions should be uniform or blurred with low texture complexity. This feature can be used to determine the composition of SC or TC. For estimating the texture complexity of the regions surrounding the main subject, the standard deviation SDNGV is given bywhere WL = min{MaxSp, MinSp} and WR = W – max{MaxSp, MinSp}.
- (c)
- The uniform region and the texture region are divided by a horizontal line: In the case of HC, the top area is generally a uniform region, and the bottom area is a texture region with higher contrast. Measuring the difference in texture complexity between those two regions can assist the decision of HC, and this feature can be calculated bywhere BMU, BMD, BCU, and BCD are given byand d is a small distance value (i.e., H/50). By summarizing all features mentioned above, the feature vector F used to identify the photographic composition of a panoramic image is represented by
3.3. Composition Identification
- (1)
- Identification of HSC and VSCIn general, the panoramic image of the SC (HSC or VSC) composition has a horizontal or vertical line formed at the image’s center. So, the feature SAH (or SAV) is adopted to evaluate the distance between the symmetrical axis and the image middle. Furthermore, two separate regions will demonstrate apparent texture differences in SC and the feature SDGH (or SDGV) will be used to examine the texture complexity of two regions in addition to the horizontal (or vertical) symmetrical line. If the SAH (or SAV) value is smaller than the predefined threshold value TSAH (or TSAV) and the SDGH (or SDGV) value is larger than the predefined threshold TSDGH (or TSDGV), the considered panoramic image is identified as the symmetrical composition of HSC or VSC.
- (2)
- Identification of CCThe region with the main subject to the surrounding regions should have a sharp contrast to the center composition. Also, the size of the main subject is larger than the other objects in the panoramic image. Furthermore, the main subject’s position must be close to the image center. Therefore, three rules must be satisfied by the CC:
- (a)
- Location rule: The feature LG from Equation (15) can be applied to measure the distance between the main subject and the image center (SL). The center position of the main subject is MOP, and the SL is set to W/2 in Equation (15). If the LG is smaller than the threshold value TLG, we can assume that the main subject is at the center of the panoramic image.
- (b)
- Saliency rule: One essential rule for CC is that salient texture difference exists between the region with the main subject and its surrounding regions. This rule can be measured by computing the feature TDS in Equation (14), and the composition belongs to CC, while the TDS value is smaller than the predefined threshold value TTDS.
- (c)
- Contrast rule: The regions surrounding the main subject will have low contrast, and the feature SDNGV can measure this in Equation (20). The main subject has a significant contrast with its surrounding region, while the SDNGV is smaller than the predefined threshold value TSDNGV.
- (3)
- Identification of TCFor a good TC, the main subject is located at W/3 or 2W/3 along the horizontal axis, and a salient texture difference exists between the region with the main subject and its surrounding regions. Therefore, like the identification of CC in 2), three features (LG, TDS, and SDNGV) are applied to identify the type of TC. The only distinction between SC and TC is that the SL is set to W/3 or 2W/3 in Equation (15).
- (4)
- Identification of HCA panoramic image belonging to the type of HC should satisfy the following three rules:
- (a)
- A manifest horizontal line exists between the sky and land or sea regions. The feature SL in Equation (16) is adopted as the possible position of the skyline.
- (b)
- The partition line (or skyline) must be horizontal, and this characteristic is fulfilled, while the feature value SDL computed from Equation (17) is larger than a threshold value TSDL.
- (c)
- The top region above the horizon is frequently the sky or the cloud with uniform and bright intensity. The texture content at the bottom side under the horizon is significantly different from the top region, and the characters can be evaluated using the feature BC defined in Equation (21).
3.4. Composition Identification Using Fuzzy Rules
- (1)
- Identification of TCFor the VSC composition, because the color symmetry appears in the middle of two image regions in addition to the vertical line, the image should have global symmetry with a low degree (SAV(L)). Also, to avoid the wrong VSC decision caused by uniform color content, the image should have the global and horizontal texture complexity above the middle degree (SDGV(M) and SDGV(H)).RuleVSC = Min{SAV(L), Max{SDGV(M), SDGV(H)}}
- (2)
- Identification of HSCFor the HSC composition, because the color symmetry appears in the middle of two image regions in addition to the horizontal line, the image should have global symmetry with a low degree (SAH(L)). Also, to avoid the wrong HSC decision caused by uniform color content, the image should have the global and horizontal texture complexity above the middle degree (SDGH(M) and SDGH(H)).RuleHSC = Min{SAH(L), Max{SDGH(M), SDGH(H)}}
- (3)
- Identification of CCFor the CC composition, because the main subject appears in the image center (LG(L)) with prominent contrast to the surrounding regions, the image should have local saliency with a low degree (TDS(L)). Also, to emphasize the main subject, the texture complexity of the other objects must be shallow (SDNGV(L)).RuleCC = Min{LG(L), TDS(L), SDNGV(L)}
- (4)
- Identification of TCFor the TC composition, the main subject appears at W/3 or 2W/3 along the horizontal axis (LG(L)), and a salient texture difference exists between the region with the main subject and its surrounding regions. Therefore, the image should have local saliency with a low degree (TDS(L)) and the texture complexity of the other objects must be very low (SDNGV(L)).RuleTC = Min{LG(L), TDS(L), SDNGV(L)}
- (5)
- Identification of HCFor the HC composition, because two regions with significant color differences appear above and under the skyline in the image, the image should have skyline linearity above the middle degree (PL(M) and PL(H)). Also, skyline levelness should be checked (SDL(H)). Furthermore, the texture complexity of the upper region above the skyline is lower than that of the bottom region (BC(H)).RuleHC = Min{Max{PL(M), PL(H)}, SDL(H), BC(H)}Based on those five rules defined from Equation (28) to Equation (32), each panoramic image’s degree of composition membership can be calculated and used as the output value to decide the photographic composition. Each degree value’s range will be located at [0, 1].
4. Experimental Results
4.1. Experiment 1: Composition Identification Using Feature Vectors
4.2. Experiment 2: Composition Identification Using Fuzzy Rules
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Suter, D. Color image segmentation using global information and local homogeneity. In Proceedings of the International Conference on Digital Image Computing: Techniques and Applications, Sydney, Australia, 10–12 December 2003; pp. 89–98. [Google Scholar]
- Felzenszwalb, P.; Huttenlocher, D. Efficient graph-based image segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Bergen, J.R.; Anandan, P.; Hanna, K.J.; Hingorani, R. Hierarchical model-based motion estimation. In Proceedings of the European Conference on Computer Vision, Santa Margherita Ligure, Italy, 19–22 May 1992; pp. 237–252. [Google Scholar]
- Zhu, Z.; Riseman, E.M.; Hanson, A.R.; Schultz, H. An efficient method for geo-referenced video mosaicing for environmental monitoring. Mach. Vis. Appl. 2005, 16, 203–216. [Google Scholar] [CrossRef]
- Rav-Acha, A.; Pritch, Y.; Peleg, S. Extrapolation of Dynamics for Registration of Dynamic Scenes; Technical Report; The Hebrew University of Jerusalem: Jerusalem, Israel, 2005. [Google Scholar]
- Agarwala, A.; Zheng, C.; Pal, C.; Agrawala, M.; Cohen, M.; Curless, B.; Salesin, D.; Szeliski, R. Panoramic video textures. In Proceedings of the ACM SIGGRAPH ’05, Los Angeles, CA, USA, 31 July–4 August 2005; pp. 821–827. [Google Scholar]
- Chen, L.H.; Lai, Y.C.; Liao, H.Y.M.; Su, C.W. Extraction of video object with complex motion. Pattern Recognit. Lett. 2004, 25, 1285–1291. [Google Scholar] [CrossRef]
- Burt, P.; Adelson, E. A multiresolution spline with application to image mosaics. ACM Trans. Graph. 1983, 2, 217–236. [Google Scholar] [CrossRef]
- Krages, B. Photography: Art of Composition; Skyhorse Publishing Inc.: New York, NY, USA, 2012. [Google Scholar]
- Banerjee, B.; Evans, B.L. A novel gradient induced main subject segmentation algorithm for digital still cameras. In Proceedings of the IEEE 37th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 9–12 November 2003; Volume 2, pp. 1640–1644. [Google Scholar]
- Obrador, P.; Schmidt-Hackenberg, L.; Oliver, N. The role of image composition in image aesthetics. In Proceedings of the 17th IEEE International Conference on Image Processing (ICIP), Hong Kong, China, 26–29 September 2010; pp. 3185–3188. [Google Scholar]
- Liu, L.; Chen, R.; Wolf, L.; Cohen, D. Optimizing photo composition. Comput. Graph. Forum 2010, 29, 469–478. [Google Scholar] [CrossRef]
- Banerjee, S.; Evans, B.L. Unsupervised automation of photographic composition rule in digital still cameras. In Proceedings of the SPIE Conference Sensors, Color, Cameras, Systems for Digital Photography VI, San Jose, CA, USA, 18–22 January 2004; pp. 364–373. [Google Scholar]
- Bautell, M.; Luo, J.; Gray, R.T. Sunset scene classification using simulated image recomposition. In Proceedings of the International Conference on Multimedia and Expo, Baltimore, MD, USA, 6–9 July 2003; pp. I:37–I:40. [Google Scholar]
- Mansurov, N. Panoramic Photography Tutorial. Available online: https://photographylife.com/panoramic-photography-howto (accessed on 12 October 2023).
- Tan, W.; Fan, T.; Chen, X.; Ouyang, Y.; Wang, D.; Li, G. Automatic matting of identification photos. In Proceedings of the 2013 IEEE International Conference on Computer-Aided Design and Computer Graphics (CAD/Graphics), Guangzhou, China, 16–18 November 2013; pp. 387–388. [Google Scholar]
- Wen, C.L.; Chia, T.L. The fuzzy approach for classification of the photo composition. In Proceedings of the IEEE International Conference on Machine Learning and Cybernetics, Xi’an, China, 15–17 July 2012; Volume 4, pp. 1447–1453. [Google Scholar]
- Obrador, P.; Saad, M.; Suryanarayan, P.; Oliver, N. Towards category-based aesthetic models of photographs advances in multimedia modeling. Adv. Multimed. Model. 2012, 7131, 63–76. [Google Scholar]
- Mitarai, H.; Itamiya, Y.; Yoshitaka, A. Interactive photographic shooting assistance based on composition and saliency. In Proceedings of the International Conference on Computational Science and Its Applications, Ho Chi Minh City, Vietnam, 24–27 June 2013; Volume V, pp. 348–363. [Google Scholar]
- Chang, H.T.; Wang, Y.C.; Chen, M.S. Transfer in photography composition. In Proceedings of the ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014; pp. 957–960. [Google Scholar]
- Faria, J. What Makes a Good Picture? Master’s Thesis, Cranfield University, Cranfield, UK, 2012. [Google Scholar]
- Chang, Y.Y.; Chen, H.T. Finding good composition in panoramic scenes. In Proceedings of the IEEE 12th International Conference on Computer Vision (ICCV), Kyoto, Japan, 29 September–2 October 2009; pp. 2225–2231. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Photographic Composition | HSC | VSC | CC | TC | HC | |
|---|---|---|---|---|---|---|
| Global Symmetry | SAV | ● | ||||
| SAH | ● | |||||
| Local Saliency | TDS | ● | ● | |||
| LG | ● | ● | ||||
| Horizontal Linearity | PL | ● | ||||
| SDL | ● | |||||
| Texture Complexity | SDGV | ● | ||||
| SDGH | ● | |||||
| SDNGV | ● | ● | ||||
| BC | ● | |||||
| Sample | SAV | SAH | TDS | LG | PL | SDL | SDGH | SDGV | SDNGV | BC |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 5.824 | 14.743 | 26 | 0.077 | 11.651 | 0.197 | 17.457 | 37.27 | 1.509 | 0.328 |
| 2 | 14.026 | 27.59 | 27 | 0.029 | 19.123 | 0.212 | 47.519 | 81.453 | 8.423 | 1.009 |
| 3 | 11.035 | 11.276 | 20 | 0.053 | 26.965 | 0.176 | 39.402 | 18.556 | 1.008 | −0.446 |
| 4 | 24.113 | 5.133 | 61 | 0.113 | 9.283 | 0.211 | 30.789 | 46.687 | 0.691 | 0.874 |
| 5 | 6.98 | 6.916 | 83 | 0.021 | 32.752 | 0.202 | 17.437 | 63.478 | 0.196 | 1.01 |
| 6 | 8.467 | 9.739 | 106 | 0.044 | 13.751 | 0.172 | 6.363 | 63.088 | 1.026 | −0.419 |
| 7 | 25.019 | 8.2 | 87 | 0.025 | 8.62 | 0.212 | 14.991 | 31.619 | 0.199 | −0.685 |
| 8 | 19.296 | 37.490 | 89 | 0.001 | 34.65 | 0.441 | 29.091 | 40.356 | 0.005 | 2.744 |
| 9 | 3.745 | 42.361 | 9 | 0.025 | 47.673 | 0.150 | 12.47 | 2.275 | 2.961 | 1.474 |
| 10 | 8.633 | 19.439 | 4 | 0.036 | 45.4 | 0.176 | 12.016 | 8.2696 | 2.575 | 2.281 |
| 11 | 19.565 | 15.061 | 102 | 0.001 | 13.743 | 0.325 | 6.082 | 45.995 | 0.997 | 0.173 |
| 12 | 3.358 | 28.628 | 8 | 0.041 | 10.213 | 0.221 | 20.787 | 4.406 | 0.747 | 0.794 |
| Composition | VSC | HSC | CC | TC | HC | |
|---|---|---|---|---|---|---|
| Sample | ||||||
| 1 | 1/1 | 0/0 | 0/0 | 0/0 | 0/0 | |
| 2 | 1/1 | 0/0 | 0/0 | 0/0 | 0/0 | |
| 3 | 0/0 | 1/1 | 0/0 | 0/0 | 0/0 | |
| 4 | 0/0 | 1/1 | 0/0 | 0/0 | 0/0 | |
| 5 | 1/1 | 0/0 | 1/1 | 0/0 | 0/0 | |
| 6 | 1/1 | 0/0 | 1/1 | 0/0 | 0/0 | |
| 7 | 0/0 | 0/0 | 0/0 | 1/1 | 0/0 | |
| 8 | 0/0 | 0/0 | 0/0 | 1/1 | 0/0 | |
| 9 | 0/0 | 0/0 | 0/0 | 0/0 | 1/1 | |
| 10 | 0/0 | 0/0 | 0/0 | 0/0 | 1/1 | |
| 11 | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | |
| 12 | 0/0 | 0/0 | 0/0 | 0/0 | 0/0 | |
| Composition | TP | FP | FN | Sensitivity | Precision |
|---|---|---|---|---|---|
| Horizontal SC | 17 | 2 | 1 | 0.94 | 0.89 |
| Vertical SC | 37 | 5 | 4 | 0.90 | 0.88 |
| CC | 10 | 1 | 0 | 1.00 | 0.91 |
| TC | 9 | 0 | 1 | 0.90 | 1.00 |
| HC | 48 | 7 | 5 | 0.91 | 0.87 |
| Sample | SAV | SAH | TDS | LG | PL | SDL | SDGH | SDGV | SDNGV | BC |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.982 | 0.235 | 0.695 | 0.595 | 0.018 | 0.701 | 0.007 | 0.649 | 0.604 | 0.024 |
| 2 | 0.843 | 0.422 | 0.447 | 0.768 | 0.063 | 0.692 | 0.969 | 0.987 | 0.000 | 0.308 |
| 3 | 0.002 | 0.840 | 0.529 | 0.775 | 0.203 | 0.713 | 0.981 | 0.274 | 0.424 | 0.001 |
| 4 | 0.238 | 0.917 | 0.570 | 0.720 | 0.012 | 0.693 | 0.832 | 0.804 | 0.539 | 0.201 |
| 5 | 0.975 | 0.442 | 0.751 | 0.791 | 0.405 | 0.698 | 0.007 | 0.944 | 0.707 | 0.309 |
| 6 | 0.962 | 0.863 | 0.838 | 0.717 | 0.026 | 0.716 | 0.001 | 0.942 | 0.728 | 0.001 |
| 7 | 0.195 | 0.404 | 0.768 | 0.814 | 0.011 | 0.692 | 0.003 | 0.534 | 0.706 | 0.001 |
| 8 | 0.549 | 0.134 | 0.859 | 0.843 | 0.485 | 0.675 | 0.162 | 0.653 | 0.761 | 0.998 |
| 9 | 0.989 | 0.108 | 0.401 | 0.779 | 0.895 | 0.723 | 0.001 | 0.087 | 0.612 | 0.761 |
| 10 | 0.961 | 0.662 | 0.373 | 0.746 | 0.854 | 0.713 | 0.001 | 0.136 | 0.741 | 0.989 |
| 11 | 0.530 | 0.228 | 0.825 | 0.841 | 0.026 | 0.620 | 0.001 | 0.794 | 0.428 | 0.012 |
| 12 | 0.990 | 0.391 | 0.340 | 0.728 | 0.014 | 0.686 | 0.019 | 0.102 | 0.587 | 0.152 |
| Sample | VSC | HSC | CC | TC | HC |
|---|---|---|---|---|---|
| 1 | 0.746 | 0 | 0.478 | 0.205 | 0 |
| 2 | 1 | 0 | 0 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 | 0 |
| 4 | 0 | 1 | 0 | 0.198 | 0 |
| 5 | 1 | 0 | 1 | 0.163 | 0 |
| 6 | 1 | 0 | 1 | 0.185 | 0 |
| 7 | 0 | 0 | 0 | 1 | 0 |
| 8 | 0.247 | 0 | 0.261 | 1 | 0.875 |
| 9 | 0 | 0 | 0 | 0 | 1 |
| 10 | 0 | 0 | 0 | 0 | 1 |
| 11 | 0.153 | 0 | 0 | 0 | 0 |
| 12 | 0 | 0 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chia, T.-L.; Shin, Y.-D.; Huang, P.-S. Identification of Panoramic Photographic Image Composition Using Fuzzy Rules. Sensors 2024, 24, 1195. https://doi.org/10.3390/s24041195
Chia T-L, Shin Y-D, Huang P-S. Identification of Panoramic Photographic Image Composition Using Fuzzy Rules. Sensors. 2024; 24(4):1195. https://doi.org/10.3390/s24041195
Chicago/Turabian StyleChia, Tsorng-Lin, Yin-De Shin, and Ping-Sheng Huang. 2024. "Identification of Panoramic Photographic Image Composition Using Fuzzy Rules" Sensors 24, no. 4: 1195. https://doi.org/10.3390/s24041195
APA StyleChia, T.-L., Shin, Y.-D., & Huang, P.-S. (2024). Identification of Panoramic Photographic Image Composition Using Fuzzy Rules. Sensors, 24(4), 1195. https://doi.org/10.3390/s24041195