2. Method
The ad hoc mesh network definition and implementation, including the explanation of the information propagation throughout the network, are explained in the following subsection. The remaining sections derive the initial position transform through a nonlinear least squares regression, starting in
Section 2.3 and ending in
Section 2.4, followed by the position refinement using an unscented Kalman filter, starting in
Section 2.5 and ending in
Section 2.5.4.
2.1. Ad Hoc Network
The proposed ad hoc mesh network followed a mobile decentralized, absolute localization ad hoc system. The nodes in the network would consist of both stationary and mobile nodes. Due to the network’s mobile nature, a decentralized network was more robust to the constantly changing topography of the network graph. The network was fine-grained (range-based) thanks to the incorporated sensors in this research, the UWB sensors, measuring the range using ToF (time of flight). The system was also required to converge to an absolute localization system; this means that the robot should be able to transition from an initial relative localization system, and once it had reached the required threshold for transitioning, convert the relative coordinate system to become a global localization problem.
The algorithm follows a similar but simplified version of the iterative multilateration AHLoS (ad hoc localization system) [
30]. The AHLoS is a method to implement the localization of a mesh network in a flood-like fashion. The algorithm started with a graph that combined localized and unlocalized nodes; when an unknown node lies in the neighborhood of three or more anchors, the neighboring anchors’ positions and distances were used to estimate its position. Once the position of an unknown node was estimated, the node became an anchor and thus continued the cycle until all the nodes were localized.
This article modified the AHLoS system to account for mobile nodes coming out and into the range of other localized nodes. The current and historical range measurements were only collected from the localized anchors and their associated position at every time step. The range measurements were then paired with the node’s odometry measurement at the corresponding time. Linear extrapolation was employed if the odometry measurements were too far apart.
The localized nodes communicate to the target robot the range measurement and the localized node’s current global position. Given the distributed nature of the mobile ad hoc network, each robot would maintain a history of measurement data from each robot. With nodes frequently entering and exiting the robot’s view and with histories stored locally, the system retains all information and remains unaffected by network topography changes. Given that the range measurement uses ToF for its UWB range estimation, no synchronization between nodes is required, thus making communication more straightforward. As for transmission scheduling, the system would adopt a carrier-sense multiple access with collision avoidance (CSMA/CA) protocol to communicate with the other devices [
31]. The device first listens to the UWB channel to check for transmitting nodes. If another node is detected, the device waits a random interval for that node to finish before checking again and then sending its data. This technique is known to be unreliable due to the hidden node problem; however, given UWB’s low transmission rate, the UWB range packets being of small size, and the expected sparsity of the robot at a specific time (no more than ten robots at a time), the risk for package collision is low. The CSMA/CA would be able to handle such traffic with acceptable system delay [
32]. If, after sending, packets are not returned within a time frame T, the ranging handshake would be sent again.
Following the data collection, several data processing checks were employed before following through with the initial localization step:
- 1.
If the current robot was stationary, then a minimum of three unique anchors were required;
- 2.
If the current robot was non-stationary and the anchors were stationary, then a minimum of two anchors were required;
- 3.
If the current robot was non-stationary and the anchors were non-stationary, then a minimum of one anchor was required.
The anchors were determined to be mobile by looking at the reported robot’s positions and ensuring the distances between points were above a certain tolerance. This provided enough information for the nonlinear least square algorithm to work.
To mitigate issues with sensor noise, a minimum number of data points was enforced to start the trilateration. Once the quota was fulfilled, the nonlinear least square algorithm was performed as described in
Section 2.4, the robot was defined as localized, and the refining process using the UKF was started. However, if the node failed to localize within a specific time frame, the robot relied solely on odometry for the localization process and “positioned itself within its relative positioning system”. Suppose the node was at any time able to satisfy all the conditions to localize due to it coming in range with other localized nodes. In that case, the robot switched from using the relative positioning system to localize itself in the new global reference frame and continued using the UKF to refine the results. At this point, the robot switched from an unlocalized node to a localized node. By constantly localizing and changing status once localized, the robots eventually converged to a network where all the nodes followed the same reference frame.
2.2. Parameter Definitions
A detailed definition of all parameters used in the system will be presented in this subsection. For convention, the vectors
and
,
represented the global position, relative position, and heading of the node, respectively. The heading was defined where 0 radians points in the positive
x-axis of
, and a counterclockwise motion represented an increase in the heading.
represented the inter distance between two points in an agreed reference frame and can be formulated as,
The relative Euclidean distance between two nodes was thus denoted as
The environment consisted of a team of UAV, UGV, and static UWB anchors labeled 1, 2, ..., N. The calculated global transformation matrices of the UGV were defined as the transformation from the established global origin point to the UGV’s odometry origin point in the global reference frame. The origin point of the odometry was assumed to be transformed by
, with 0 heading, linear and angular velocity, to the robots’ initial global position (
). The transformation thus translated and rotated the static odometry frame of the robot. To solve the problem, each
was able to access the odometry data, denoted as
with angular velocity
, linear velocity
, heading
, also represented as
, and
represented the yaw rate. The robot had distance measurements to its neighbor
, i.e.,
. It was assumed that the robot was moving on a flat 2D plane. As such,
remained constant. The global position
was then derived from
by:
Each denoted the set of its neighbors as where . The neighbor transmitted its range measurements and UWB anchor position, . The position measurement data were located in the robot’s global reference frame, i.e., . Each UWB anchor was annotated as with a unique identification k where , and similarly, each UWB tag was denoted as with a unique identification w, where .
2.3. Initial Localization
An initial position estimate was made on the target node. The proposed algorithm solved this problem by structuring the estimate as a nonlinear least square (NLS) problem. To simplify the construction of the NLS, the odometry and neighboring range data of a single robot node were used to calculate . The position estimate was later refined using the UKF.
The geometry of the robot is defined and elaborated on below. There were two tags on the robot, which were separated by a fixed distance d. In the global reference frame, the tags were defined as . In the static inertial reference frame of the robot, the position of the tags was represented as , where the left tag was at , and the right tag was at . In addition, the odometry position was measured from the robot’s defined origin, , which was the midpoint of the right and left tags. , and therefore, . The range recorded by the UWB tags was represented as , where was a UWB anchor located on a UGV neighbor.
The robot’s heading was considered when solving the nonlinear least squares problem by compensating the target distance by rotating the tag pose. The relative tag position, defined as , was represented as the vector rotated about the center of the robot () by the heading global heading .
2.4. Nonlinear Least Squares
The nonlinear least squares optimization method seeks to minimize the following:
where
was the residual given by:
The range measurement
was defined as a function of
. In addition,
represented the current heading measured from the odometry and
represented the odometry position
:
The minimum value of
S could be found when the gradient was 0. As a result, a Jacobian was used to calculate the partial derivative of all the
n variables needed, where
represented the optimization parameters that were optimized—in this case,
.
Due to the gradient equations not having a closed solution, the variables
were solved iteratively with Newton’s iteration method.
The Jacobian is a matrix of partial derivatives as a function of constants, the independent variable, and the parameter. It was constructed as such:
A single row of the Jacobian (
J ) was derived from the
function below. In this matrix
represent
and
, respectively.
Using Newton’s iteration algorithm for minimizing the error, the Jacobian in Equation (
11) and the residual functions
were calculated at each step. The residual function was redefined as
, and the vectors
and
were introduced as:
Thus, the Newton iteration became:
where
represented the new estimated parameters, and
was the last approximation. The initial estimate needed for the Newton approximation (
) was provided in the simulation. The parameter
can be initialized in one of two ways: it can either be set to an initial state of 0, or it can be provided as a coarse estimate of the robot’s geographic area. The algorithm terminated when
, where
was a defined a termination tolerance criterion.
This was this paper’s approach to solving the nonlinear least square optimization. Additional extensions to the NLLS could be used to improve the solution depending on the particular problem. The scipy.optimize.least_squares function was used in this work to implement the nonlinear least square calculations.
Monte Carlo Simulation
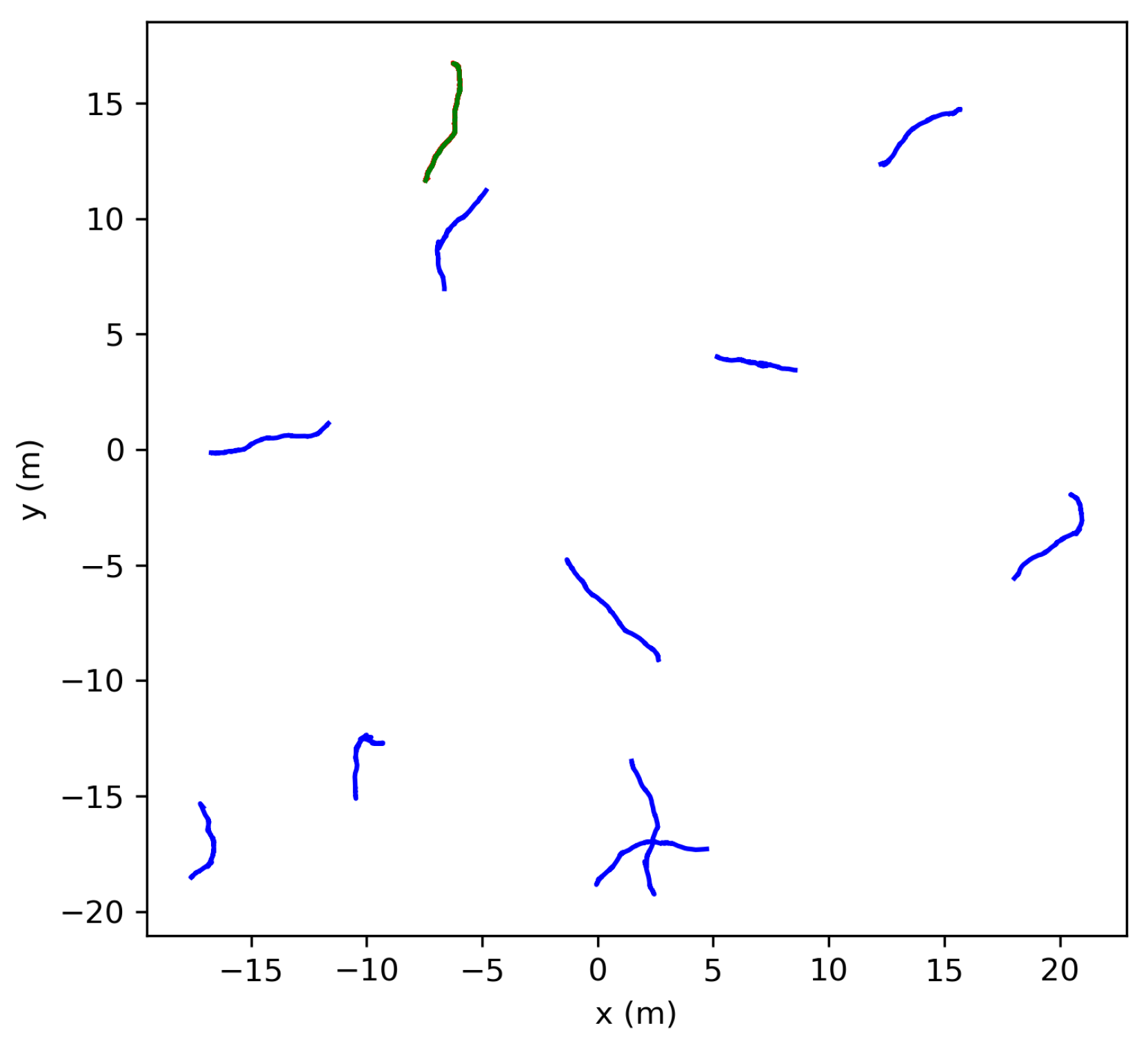
A Monte Carlo simulation was developed to demonstrate the convergence characteristics of the initial localization process. This simulation involved the manipulation of two critical variables: the number of robots traversing the environment, ‘N’, and the time horizon for the odometry history, ‘T’. In the simulation, ‘N’ random robots were created, each adhering to a differential drive motion model. At each time step (0.1 s), these simulated robots moved with a random linear velocity selected from the range of [−vmax/2, vmax], favoring forward motion, and an angular velocity sampled from [−wmax, wmax], where both vmax and wmax were set to 2. The control inputs were sampled uniformly within their respective ranges. Simultaneously, one robot was randomly selected to transmit its range measurements at each time step.
The parameter ‘T’ governed the duration before the localization process was conducted using the collected data. Random noise was introduced to the acquired odometry data, affecting both anchor poses and the target robot’s measurements. The noise levels were standardized using a zero mean Gaussian distribution with standard deviations set to 0.5 cm for the x and y coordinates of the odometry anchor poses, 2 cm for the range measurements, and 1/1000 radians for angular measurements. These noise standard deviations were deemed appropriate given the sensors available for the following reasons. Assuming that the anchor poses were using an RTK or a similarly high-accuracy localization engine for their positioning, a standard deviation of 0.5 cm was deemed appropriate. The Decawave DWM1000 Modules were observed to have an approximately 2 cm deviation in their range measurements, and onboard Microstrain IMU was estimated to have an approximate noise of 1/1000 radians. The target robot was uniformly randomly placed within a 10 × 10 m world with a randomly assigned orientation, as demonstrated in
Figure 1. Additionally, the nonlinear least squares’ initial guesses were set to zero.
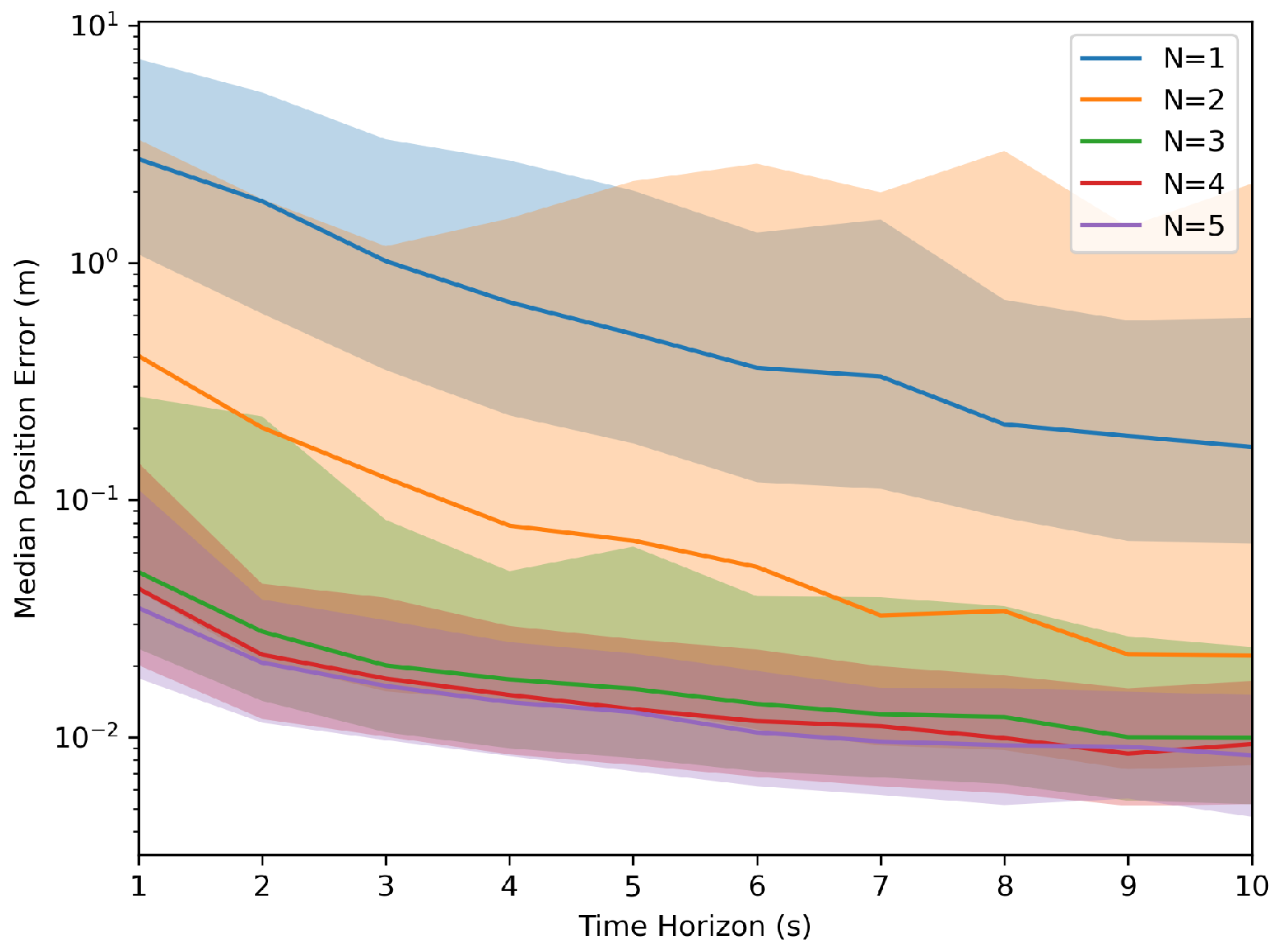
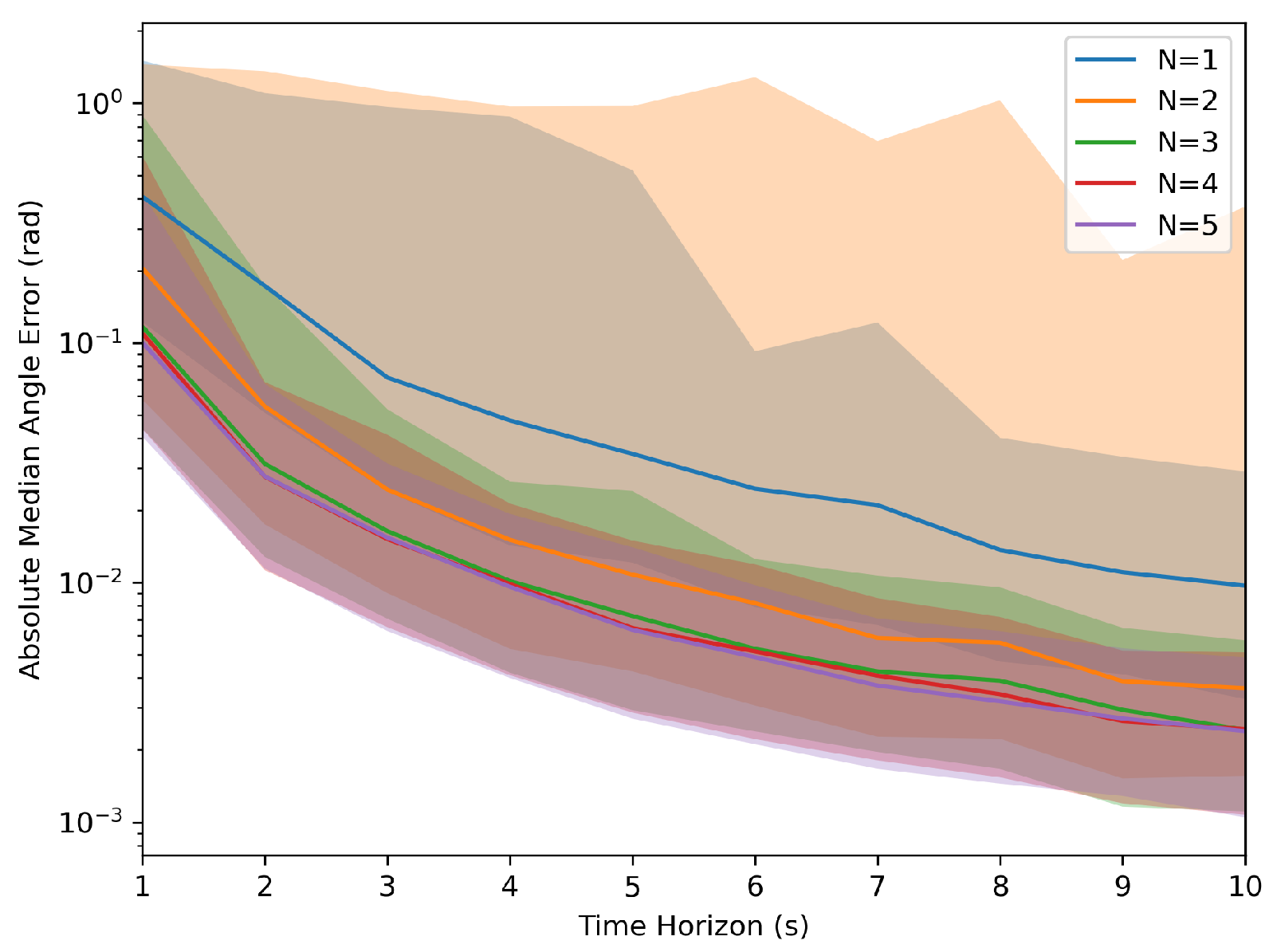
Each parameter combination was simulated with 1000 samples to collect the aggregated information. These simulations generated values of ‘T’ from 1 s to 10 s and an ‘N’ ranging from 1 to 5 robots. The results, as depicted in
Figure 2 and
Figure 3, indicated that as the time horizon ‘T’ increased, the Euclidean error relative to the target transformation matrix diminished significantly. In the figures below, the median error was used to demonstrate the error over the runs with the light-shaded regions representing the interquartile range of the error. Furthermore, a higher number of robots present led to less variation in the error relative to the target across runs, and the system was less likely to reach an incorrect solution.
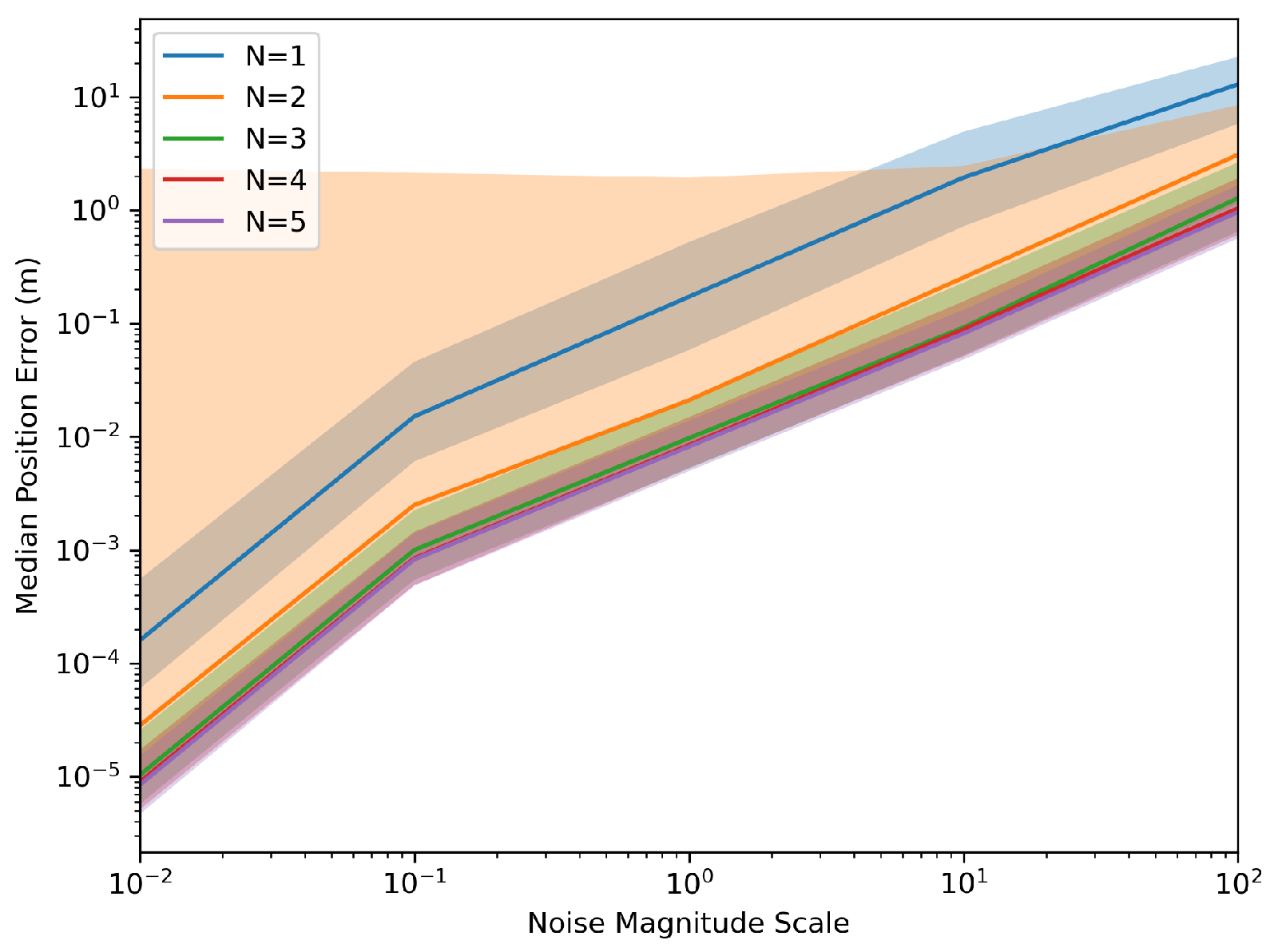
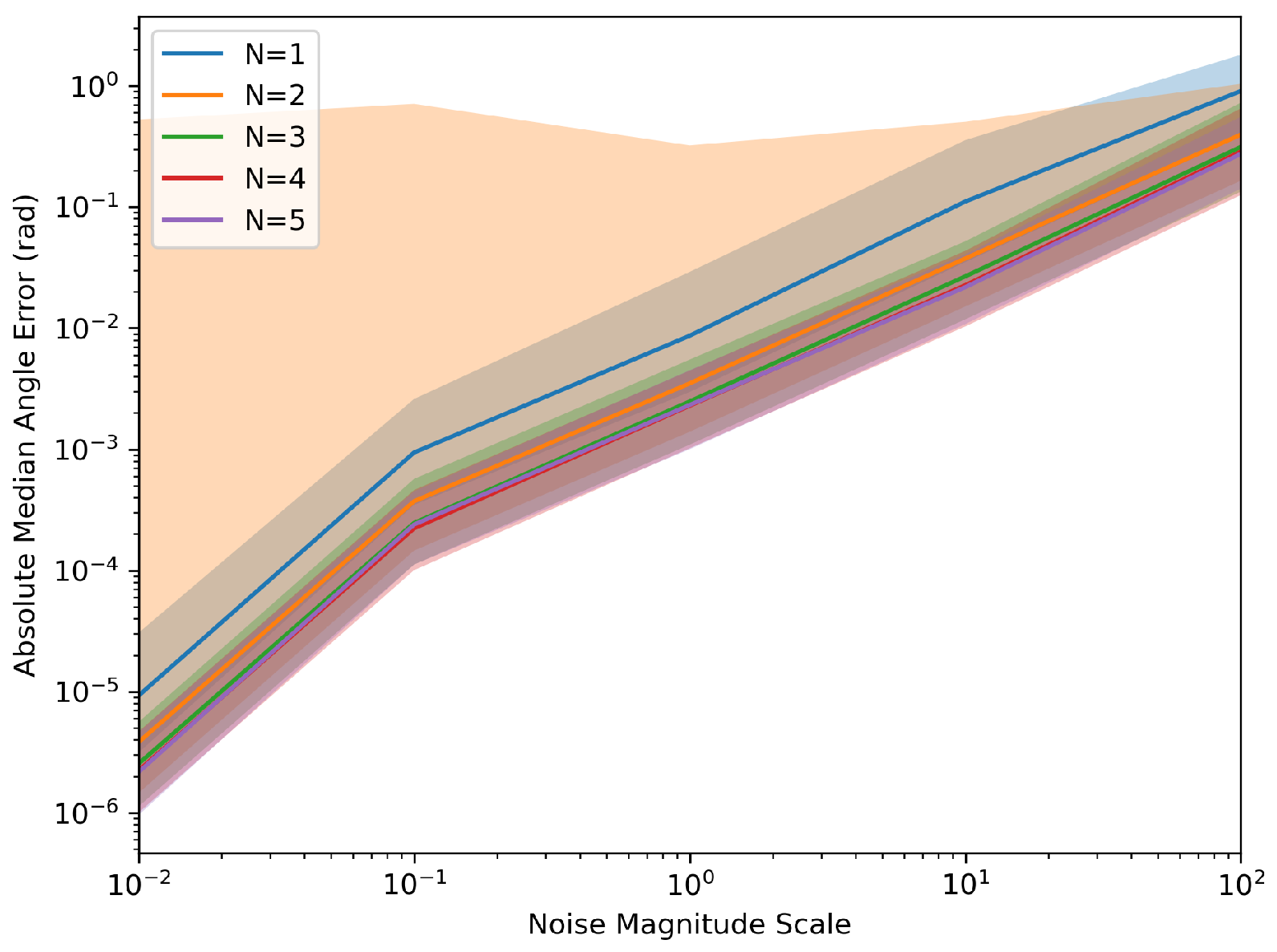
Figure 4 and
Figure 5 demonstrate the robustness of the system relative to noise levels. The Monte Carlo simulations were generated again; however, this time, assuming a constant ‘T’ of 10 s and a varying scale of the noise levels listed above at different magnitudes.
When N = 2, the maximum error is often larger than at N = 1. This may be due to the fact that when optimizing with N = 2, it is more likely to reach a local minimum along an approximate axis of symmetry due to the angle’s nonlinearity. This causes an invalid solution to be returned. Further research in using quaternions instead of Euler angles when optimizing, which follows a more linear mapping, could help reduce the nonlinearities in the system. This would allow for different, more robust optimization methods.
2.5. UKF Position Refinement
In the following sections, the robot has already been localized and given an initial position estimation. Further refinement of the results by reducing the sensor noise was achieved using a UKF [
33,
34]. Two types of data were used in the UKF. The first came from the ranging measurements at time step
k,
, between the tag
on the target node and a localized neighbor anchor
. The second piece of data came from the robot’s onboard odometry. The following sections go through the UKF model for the CTRV motion model.
2.5.1. Motion Model
The UKF motion model that this article followed was the constant turn rate and velocity magnitude model (CTRV). This nonlinear motion model assumed that the node could move straight but turned following a bicycle turn model with constant turn rate and linear velocity [
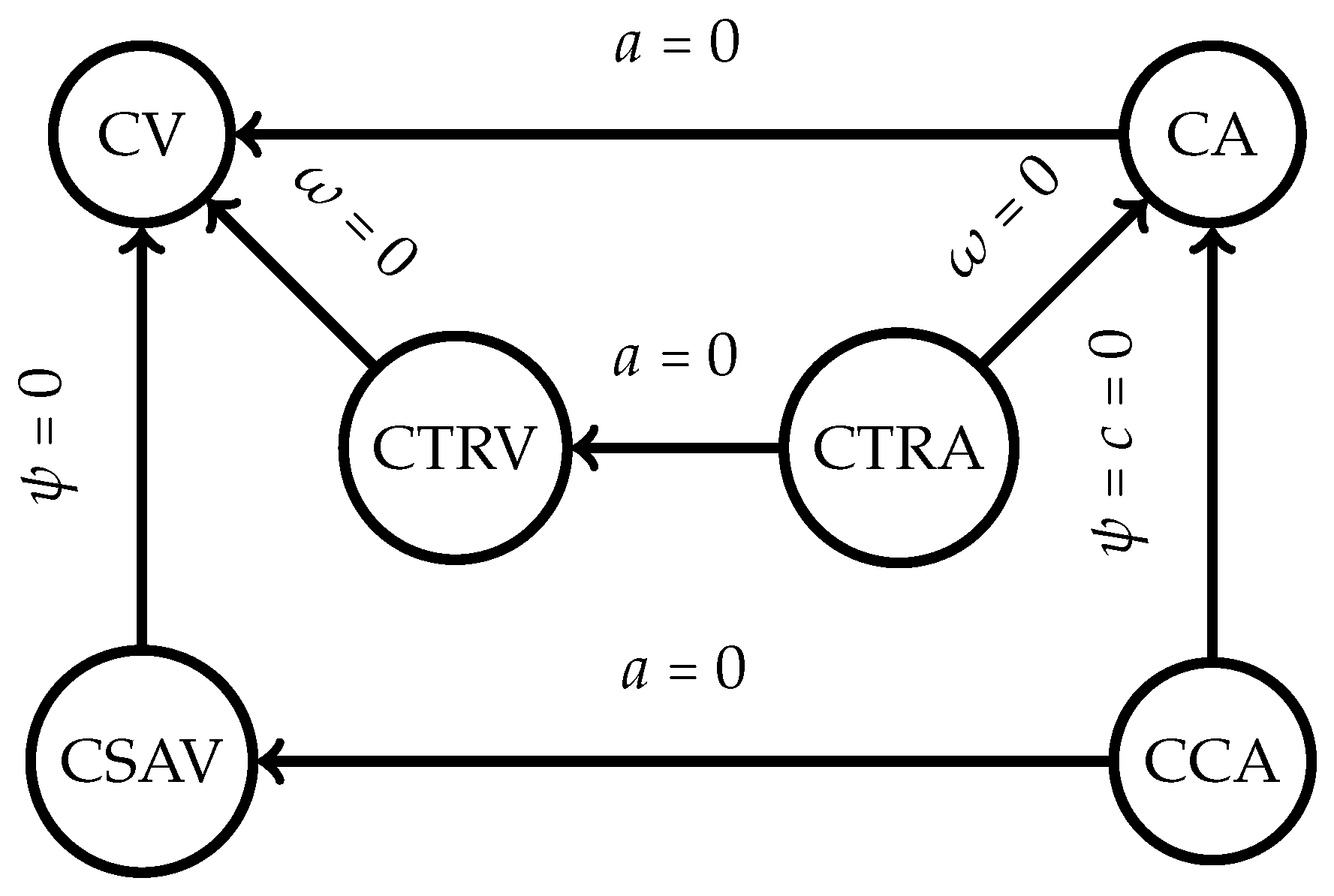
35]. Other types of motion models were available, as illustrated in
Figure 6. The constant velocity (CV) motion model was the simplest one available, a linear motion model where the linear acceleration was defined to be 0. The constant turn rate and acceleration (CTRA) is an expanded version of the CTRV motion model where the acceleration is accounted for and determined. Similarly to the CTRA motion model, the constant curvature and acceleration (CCA) model replaces the yaw rate of the model with the curvature instead. The constant steering angle and velocity (CSAV) model returns to having the acceleration constant and replacing the assumed constant steering angle instead.
Each model has its own set of advantages and disadvantages; however, the CTRV motion model was chosen thanks to the balance in computation speed and accuracy in comparison with each different model [
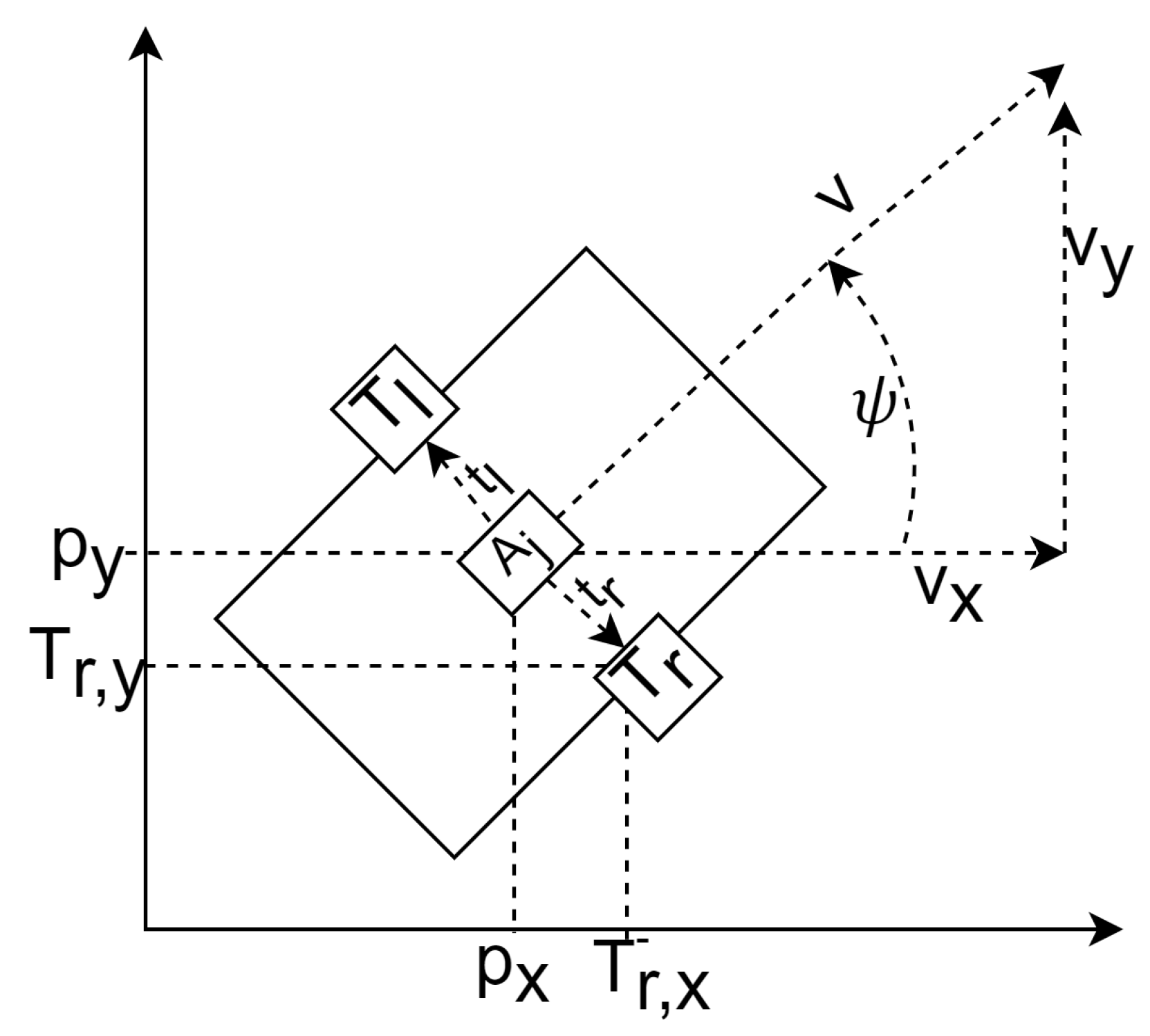
35]. The CTRV was also selected because the odometry sensor output contained the same state variables. This research problem formulation assumes the nodes of interest are ground robots; however, a general motion model could be used. As long as the robot’s dynamics can be derived, the system’s motion model can be used with this implementation. For drones, the motion model is linear. This eliminates the need for an unscented Kalman filter model, allowing the use of a linear Kalman filter instead. The state vector of the CTRV model was defined to be (
Figure 7):
where
was the node’s speed,
was the yaw angle, which described the orientation according to
Figure 7, and
represented the yaw rate. The change in rate in the state was expressed as:
The current step in the process was denoted by
k and the subsequent step by
. Consequently, the time difference was expressed as
. The process model, which predicted the state at
, could be decomposed into the deterministic and stochastic parts. To derive the deterministic part:
However, problems arose when
as this would cause a division by 0. A modified version of the motion model was thus defined for when
:
Next, the stochastic component was designated as the noise vector, encompassing the linear and yaw acceleration noises in a CTRV model. At time step
k, the noise
was characterized as follows:
where
was the linear acceleration noise defined as a normal distribution,
and
were the yaw acceleration noise defined as a normal distribution,
. It was assumed that the linear and angular acceleration would remain relatively constant during small time intervals, resulting in approximately linear motion between two timesteps (this assumption was valid unless the yaw rate was excessively high). As a result, the noise function was expressed as follows:
The full motion model was characterized as follows:
2.5.2. State Prediction
The first step to the unscented Kalman filter was the sigma point generation. Using sigma points is the main difference between the EKF and the UKF. The EKF linearizes the system through a Taylor-series expansion around the mean of the relevant Gaussian random variable (RV) [
34]. Using multiple points to sample the state distribution improved the linearization of the nonlinear space [
34]. When greater accuracy was required, a UKF was recommended compared to an EKF. Due to the addition and the linear scaling of the number of sigma points required based on the dimensionality of the state vector, UKFs are known to be more computationally expensive. Following a Gaussian distribution, the sigma points were generated from the last updated state and covariance matrix.
First, the augmented state and covariance matrix were formulated, with the normal state vector denoted by:
Having a dimension of
, the covariance matrix
took the form of an
matrix. Meanwhile, the noise vector was characterized as:
with dimension
, the augmented state matrix was represented as follows:
The augmented state dimension, determined as
, yielded a total of eight dimensions for the CTRV model, specifically
. Subsequently, the process noise covariance matrix was constructed, incorporating the expected acceleration and yaw rate Gaussian distribution into the matrix
Q, resulting in the following representation:
The augmented covariance matrix was thus represented as:
The augmented covariance matrix became a square matrix with size
. By convention, it was recommended to have at least
sigma points; in the case of the illustrated model, this would be
. The sigma points were then calculated as a list
where
was the scaling factor defined as
, where
dictated how far away from the mean the sigma points would be positioned [
37]. The parameter
defined the spread of the sigma points around
and was set to a small positive value between 0 and 1. By default, it was set to 1; however, this could be tuned if necessary. When taking
for the sigma points, there were multiple ways to take the square root of a matrix; however, Cholesky decomposition was recommended due to its computation speed. The output of this list should be in the format
.
Once the sigma points were calculated and transformed into their respective predicted state, each was transformed using the process model and then saved to another list now of format
. This process is demonstrated in Algorithm 1. The processed state sigma points were in the format
.
| Algorithm 1 Sigma point transformation |
Require: , the sigma points of the augmented Require: , the process model function for all do Append to end for return
|
In this step, the predicted state mean vector and the predicted covariance matrix were calculated by aggregating the sigma points using a weighted average of the points. There were multiple ways to initialize the weights for this part; however, this paper sticks to a standard Gaussian distribution.
where
and
were the same from the sigma point calculation in
Section 2.5.2.
was an extra parameter used to incorporate any prior knowledge of the distribution of the state. In most cases, this paper’s
was left to be 0. Once the weights were calculated, the predicted mean and covariance were calculated, respectively:
2.5.3. Measurement Prediction
The measurement stage processes the sigma points into predicted measurement outputs. To accomplish this, a measurement function
was developed for each of the sensor types, where
was the output of the process model in the prediction step in
Section 2.5.2. The measurement vector was
, and
was the inherent measurement noise.
Due to this paper tackling the fusion of two sensor types, the odometry data and the UWB range data, two different
functions needed to be defined. For the odometry data, the state vector was defined as:
The measurement transformation function for the UWB ranging sensors took a similar format to the nonlinear least square
derivation (
Section 2.4) where the predicted UWB range measurement was derived given the estimated sigma point state (
), the known anchor point position (
), and the tag position relative to the node’s reference frame (
).
The set of measurement sigma points was denoted as . If the measurement used odometry, the output shape should be , and if it was UWB range data, the output should be .
Once the measurement sigma points were collected, the weighted predicted measurement means (
), and the predicted measurement covariance (
) were calculated, similar to how the mean and the covariance from the predicted state sigma points were calculated. The weights were defined in
Section 2.5.2.
The measurement noise covariance was also defined
, where the vector
was the measurement noise for the sensor’s state. For the odometry sensor,
R would be defined as:
While the
R matrix for the UWB range sensor would be defined as:
Using the defined
R matrices, the predicted measurement covariance could be defined.
2.5.4. State Update
The actual state vector could be updated after defining the predicted state and measurement. First, the cross-correlation between the state points in state space and the measurement space (
) had to be computed:
From there, the Kalman gain was calculated:
The current state and covariance matrix were then updated, respectively, where
was the currently retrieved measurement data:
3. Simulation Results
ROS Melodic using Gazebo 9 was used to simulate the described environment and used a set of three objects/robots to model the world. The first object was a simple static UWB beacon represented by a solid cylinder meant to represent a generic UWB anchor, such as a tripod-mounted Decawave DWM1000 Module. This object would be given an agreed-upon location in global coordinates, such as GPS, and as such, the estimated position would be static and with high precision. Decawave claims they can support up to 6.8 Mbps data rates with frequencies of 3.5–6.5 GHz, a centimeter-level accuracy, and maintain a connection for up to a range of 290 m.
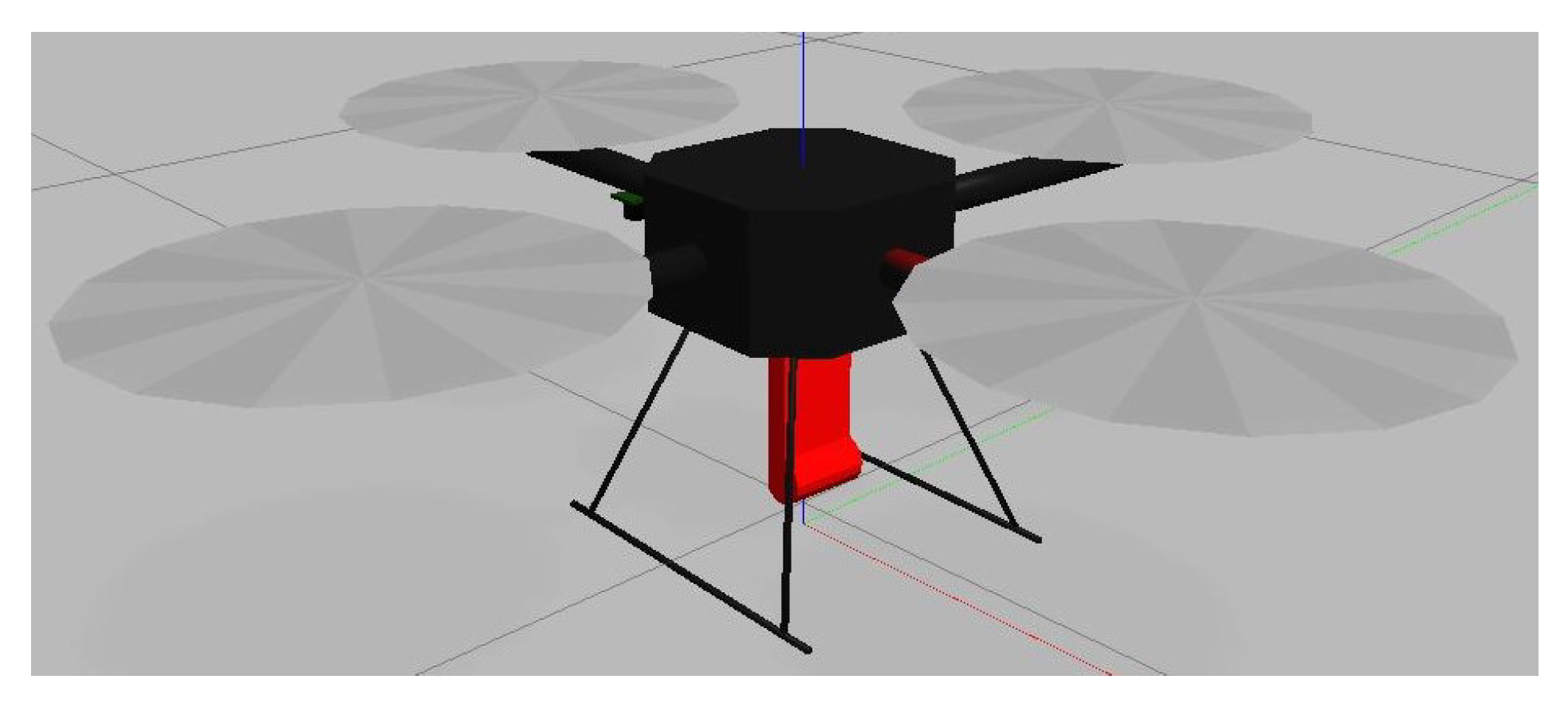
The second object was a Hector quadrotor, in
Figure 8, with a UWB anchor mounted on the bottom of the drone [
38]. This drone was meant to represent a moving UWB anchor. The drone would also be assumed to have been localized using GPS or cameras to represent a high-precision localization estimate. Instead of GPS, drones could use feature positioning based on public geographical information to remove the need to utilize GPS and generate high-accuracy localization [
39,
40]. In addition, as previously demonstrated in the Monte Carlo simulations in
Section 2.3 in
Figure 4 and
Figure 5, even when noise is present in the system, if the time horizon is sufficiently large, the system will be able to derive its initial position parameters relatively accurately. Thus, even if the "localized nodes" contain noise information, the system will be able to provide an initial estimate of the position.
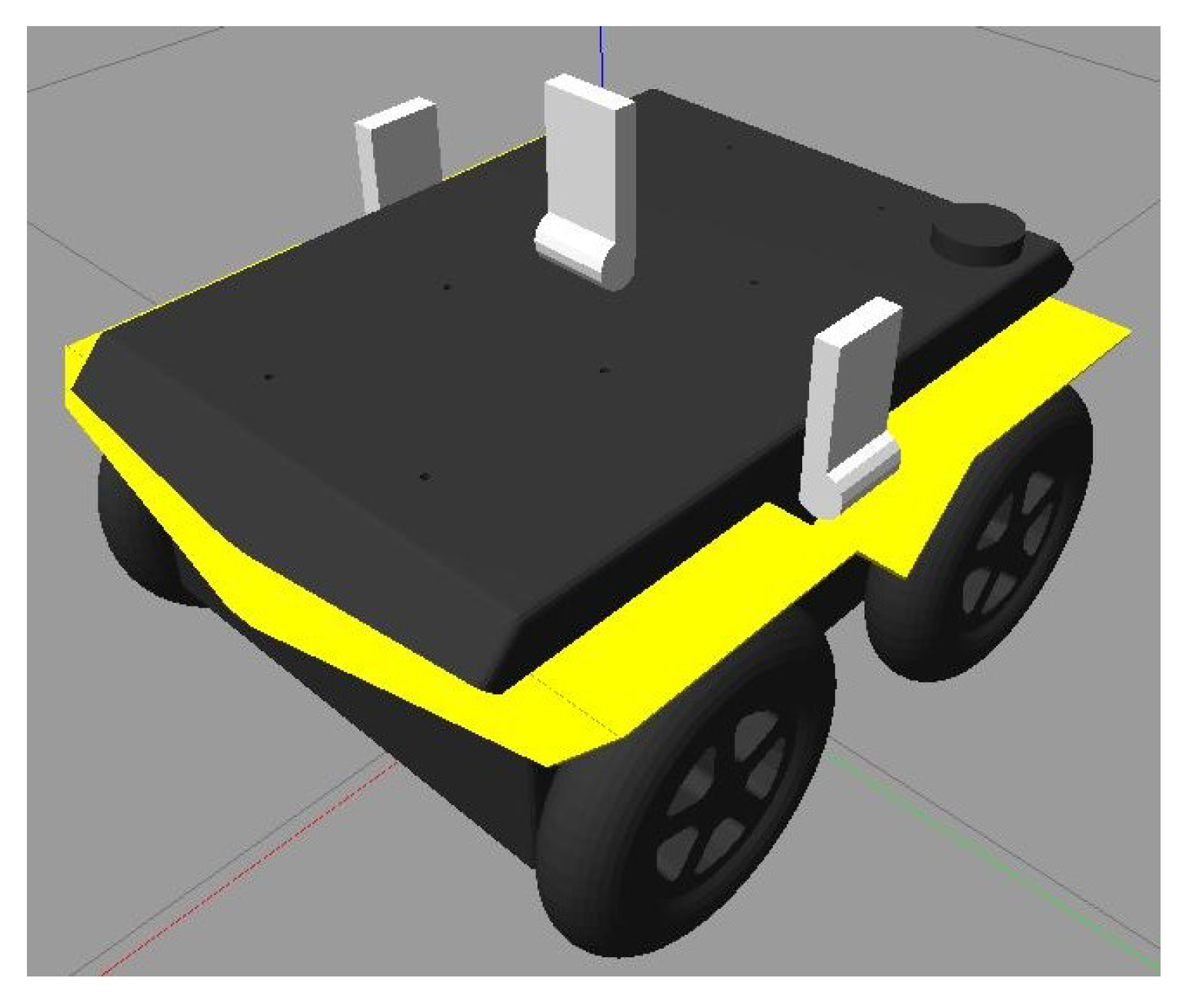
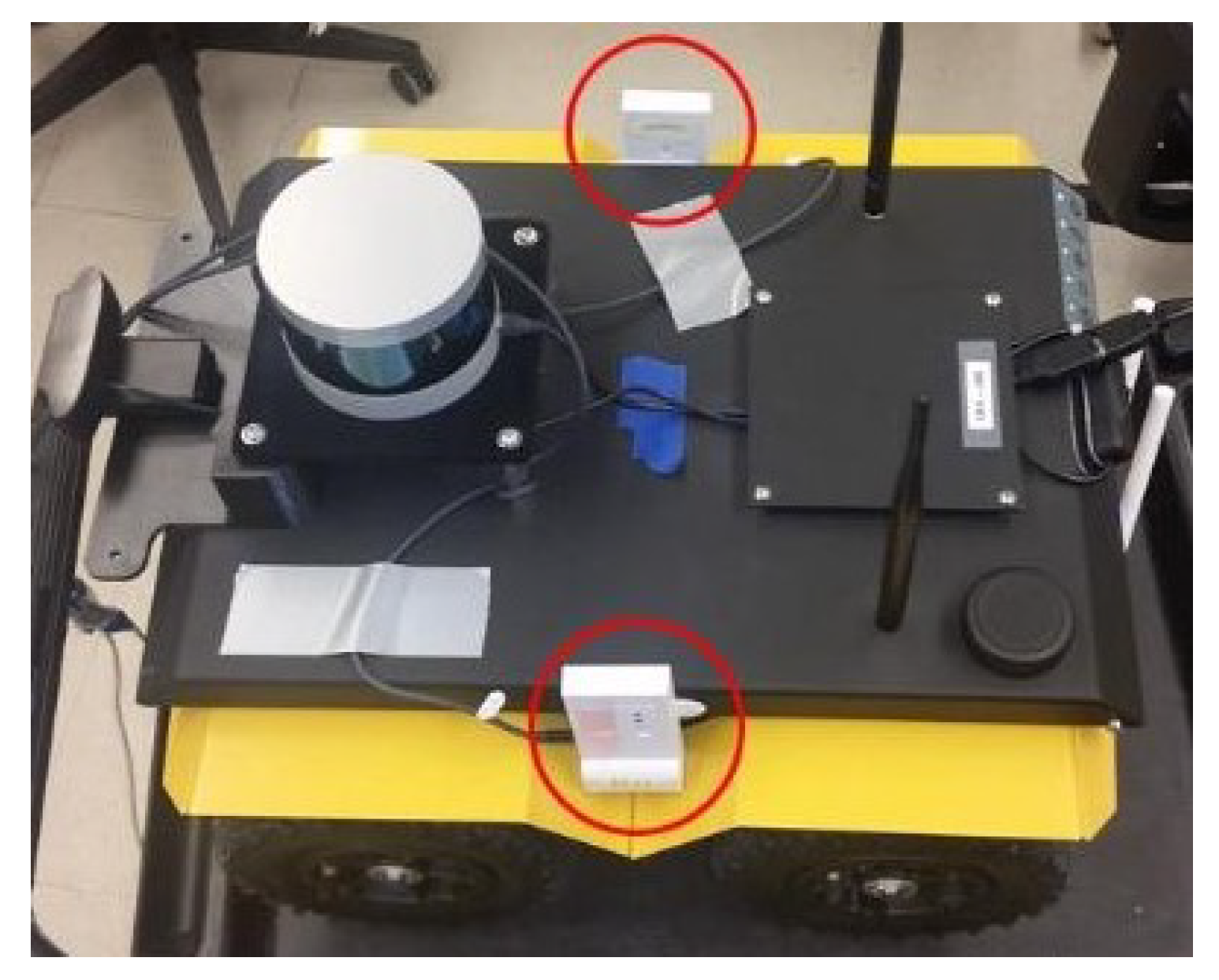
The final object was the implementation of the Clearpath Jackals robots depicted in
Figure 9 and
Figure 10 with two UWB tags on the top of its hood, equally spaced from the center axis of the robot with an extra centrally located UWB anchor. The tags allowed the robot to position itself, while the anchors allowed information propagation to help other robots localize themselves. In this study, it was assumed that the initial position and orientation of the Jackals were not provided. However, an initial estimate could be provided in the initial localization step to improve and reduce the initial position estimate error and thus improve the accuracy. As such, the localization of the Jackal was the main focus of the presented work.
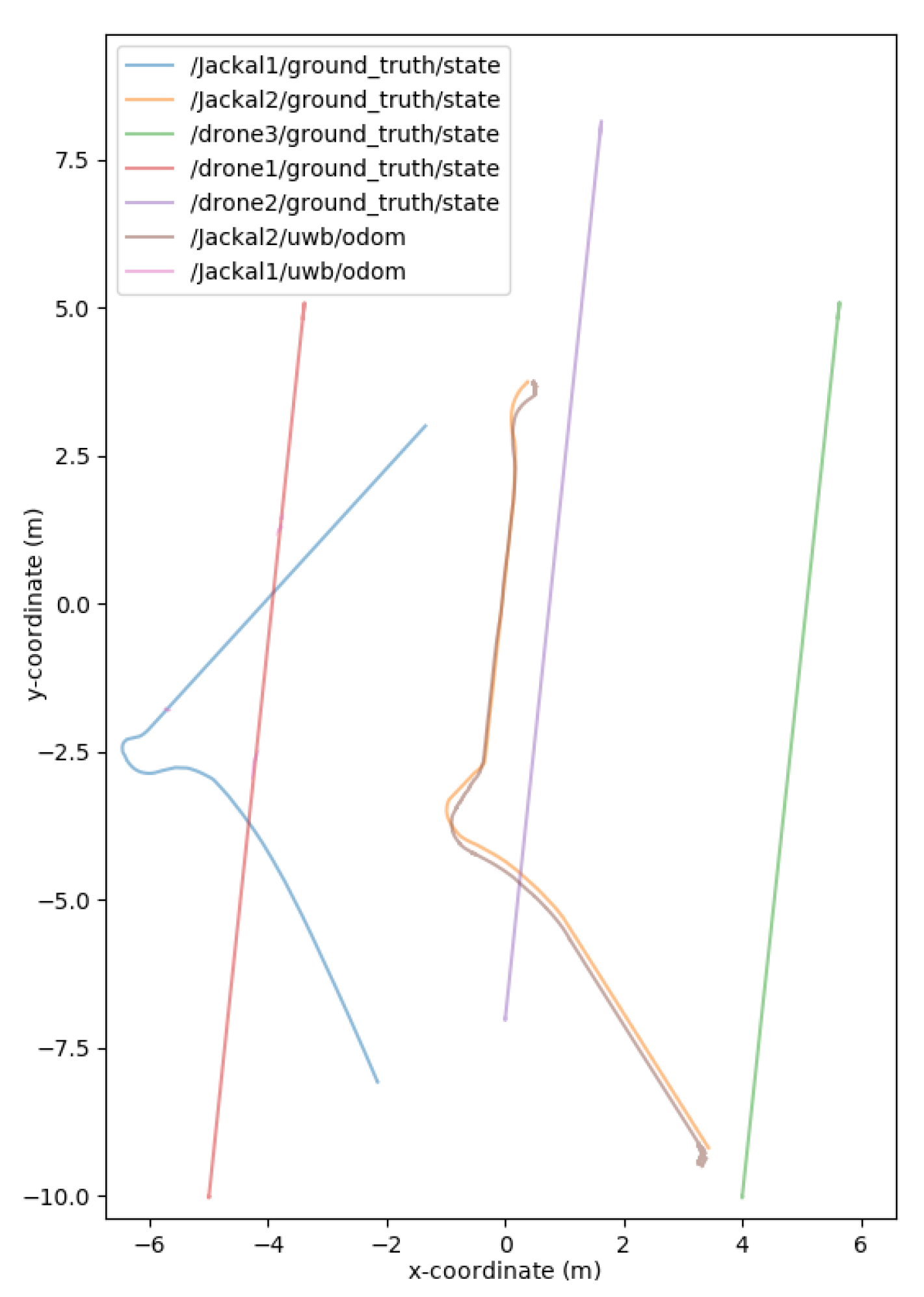
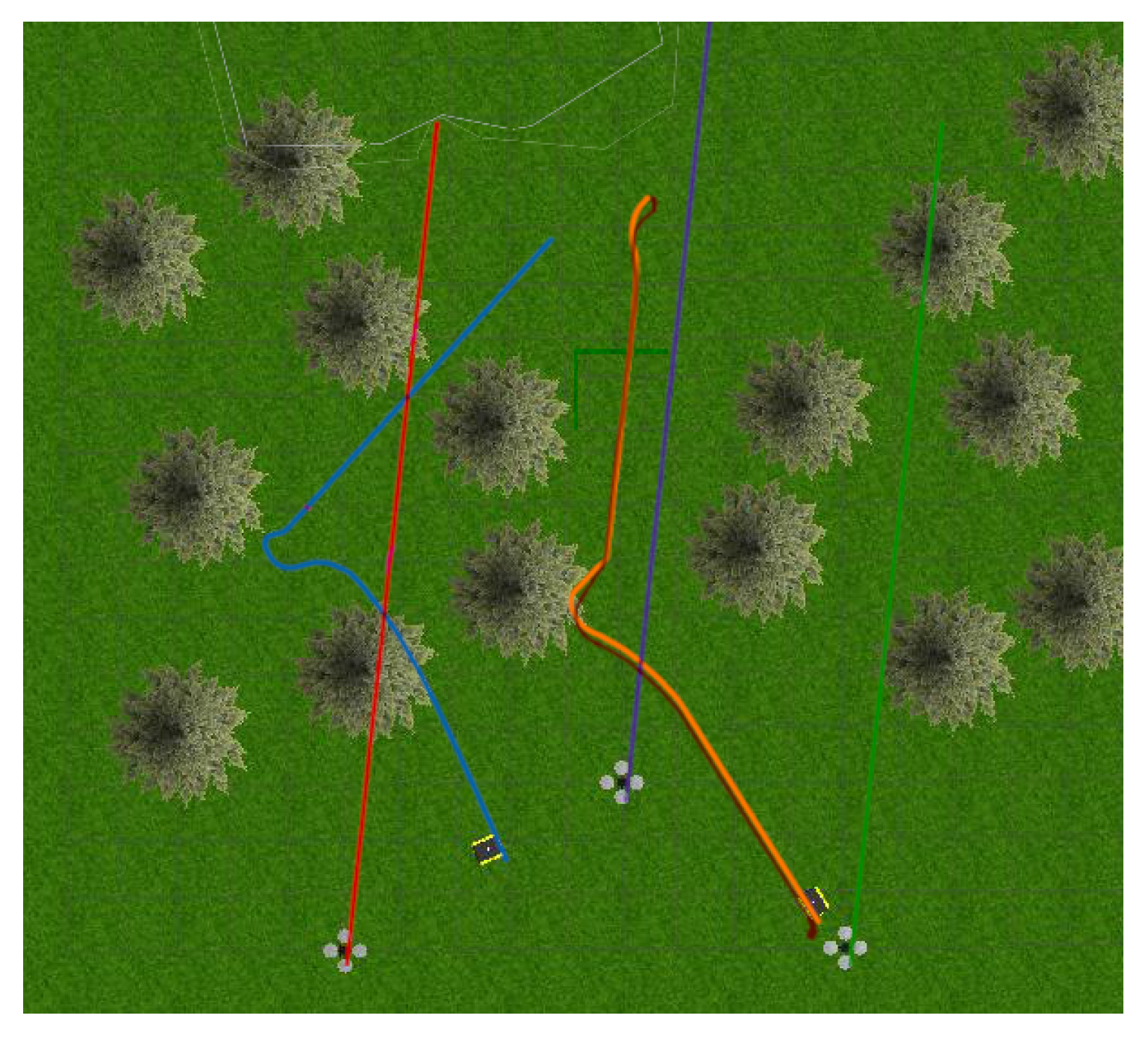
The world consisted of two Jackals and three drones to simulate a mobile surveying endeavor, as presented in
Figure 11 and
Figure 12. The drones represented the mobile anchors as they flew over the trees and had GPS to help localize themselves with acceptable accuracy. The drones also helped the ground Jackals, who did not have GPS. The process proceeded as such: initially, the drones flew over the trees to achieve GPS localization in a global reference frame; once localized, the Jackals developed their initial position estimation based on the Hector drones. Once the Jackals had localized themselves, they performed their abstract task. Once the task was complete, the drones moved to another location to be surveyed, and the Jackals followed suit. When the Jackals moved to the new location, the drones were too far or obstructed to send UWB range information, so to continue the localization, the two Jackals sent their inter-robot range measurements and used their onboard odometry. Once the Jackals approached the new survey site, the UWB range measurements from the Hector drones helped correct any deviation during the offline path. The simulated noise measurements were based on the empirical data collected from the DWM1001-DEV in range increments of 1 m up to 141 m. The standard deviations of the measurements were recorded. The measurements also included scenarios when the UWB sensor was occluded by thin objects (<25 cm) and thick objects (≥25 cm). The distributions can be found in the Gazebo UWB Plugin
https://github.com/AUVSL/UWB-Gazebo-Plugin/blob/master/src/UwbPlugin.cpp (accessed on 3 August 2023).
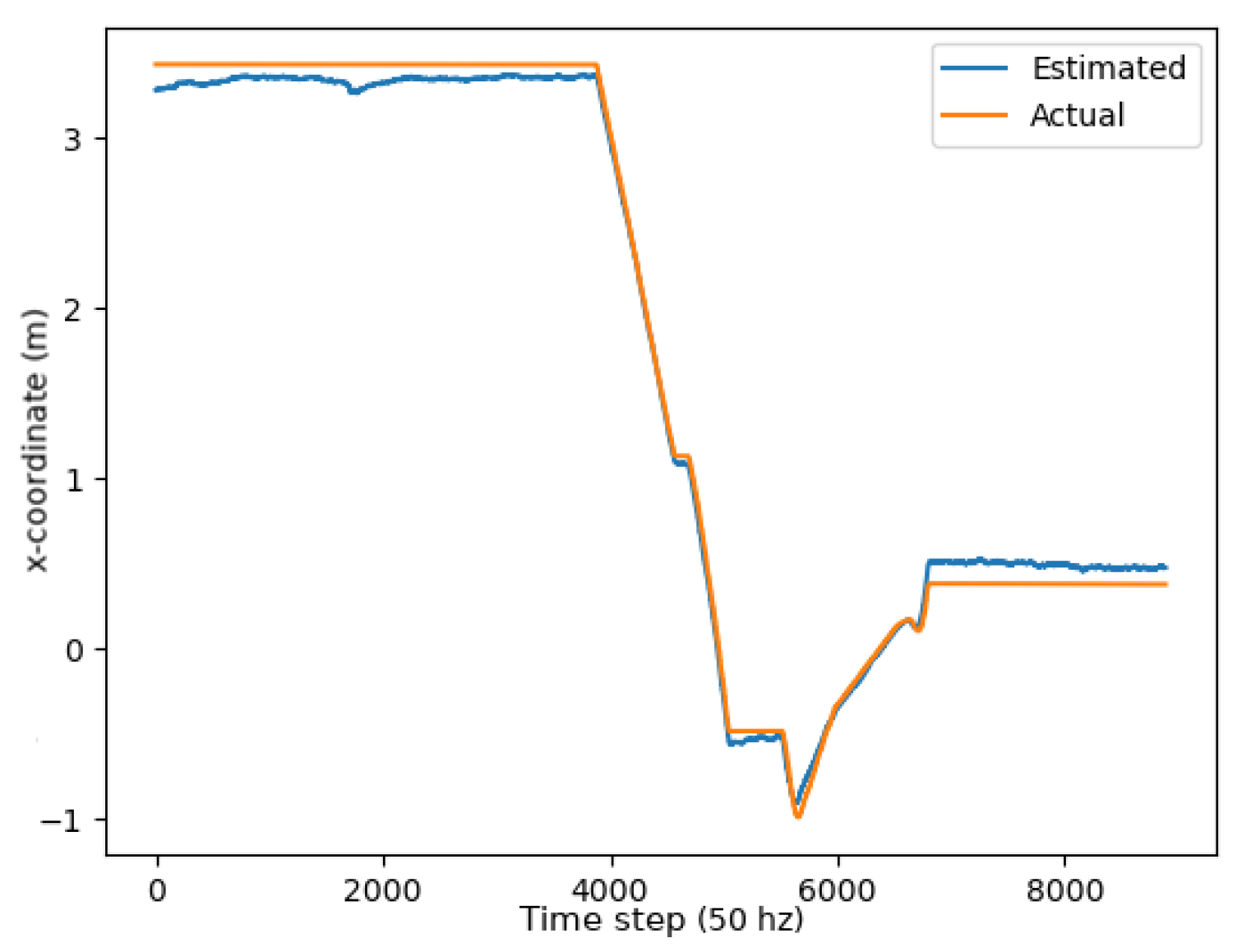
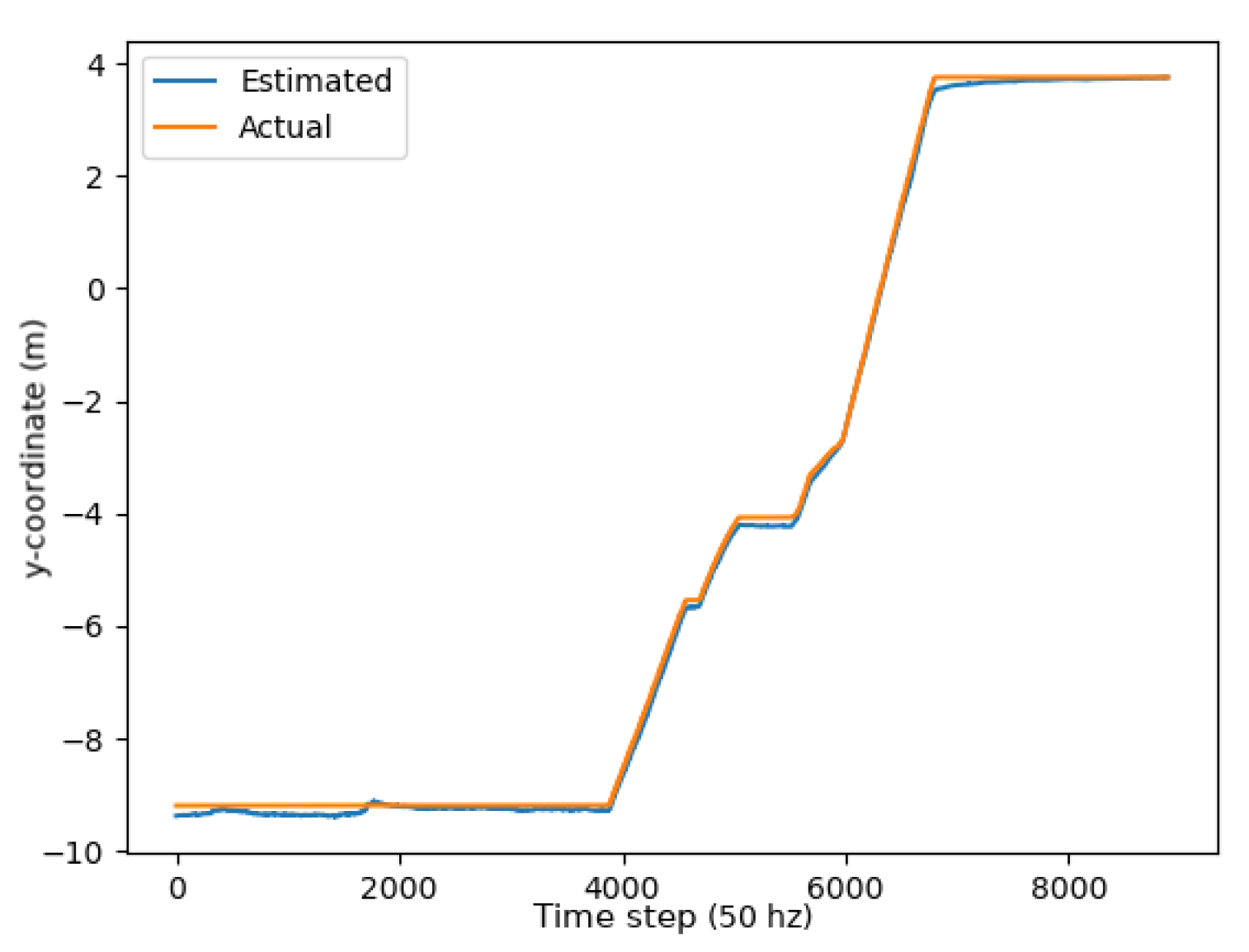
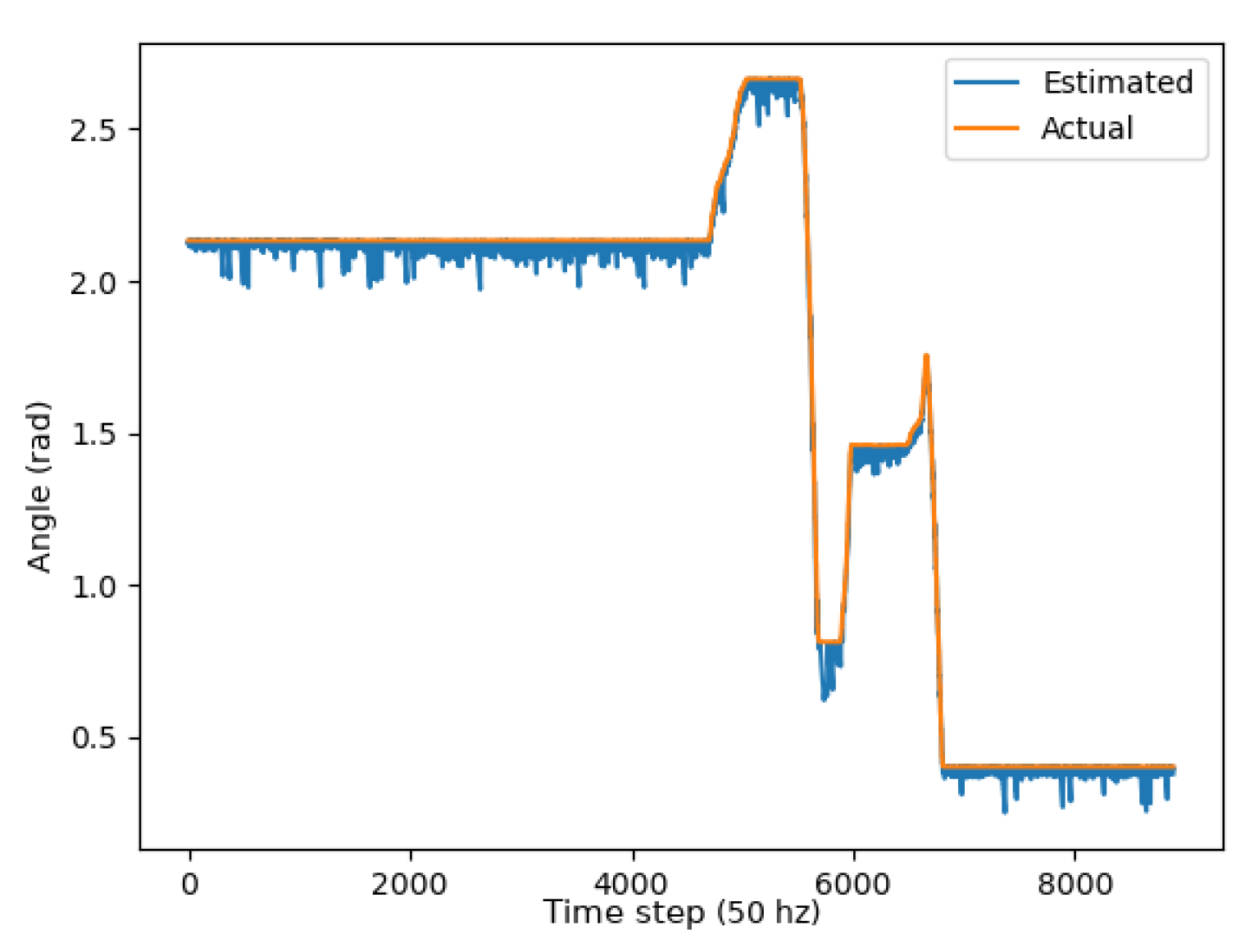
Two metrics were used to determine the accuracy of the unscented Kalman filter: the RMSE (root mean squared error) and mean absolute error (MAE). As demonstrated through the graphs in
Figure 13,
Figure 14 and
Figure 15, the unscented Kalman filter developed for the Jackals follows the ground truth very closely with minimal RMSE values of no greater than 0.10921 m for the positioning errors; however, it could be noted that the unscented Kalman filter had a more significant difficulty estimating the velocity and the yaw rate, with larger errors of 0.24959
and 0.65856
, though due to the difference in scales of the measurement values, this error was deemed to be acceptable. The MAE measurement values were relatively consistent, hovering around between 0.27
and 0.3
, which informs of a possible issue of systematic bias introduced in the system where the position of the system was consistently offset from the actual target. As noticed through the x,
Figure 13, and y,
Figure 14, position graphs, if noticed closely, the estimated values for the x and y position, when the values seem steady, tend to lag below the ground-truth value. Further tuning of the unscented Kalman filter model’s parameters, such as the sensor noise matrix
R, and the sigma point generation parameters
and
, could increase accuracy in the model. The MAE pose is the average position accuracy, a measure of how close, on average, the position of the robot was to the actual position of the robot using Euclidean distances
. Thus, on average, the robot was about 15 cm away from its target position, as noticed by the RMSE, which was often with errors that had lower magnitudes. The confidence error was calculated as the margin of error defined as
, where
is the level of confidence (1.96 for a 95% confidence interval),
was the standard deviation of the variable, and
n was the sample size. In
Table 1, the confidence interval was calculated using a sample size of five runs.
The current literature does not provide a good reference comparison to this system. This is due to systems assuming a static environment or a static leader. However, no system exists where all anchors can move simultaneously and still remain localized.
4. Conclusions and Future Work
This article discussed UWB localization using both stationary and mobile nodes. Specifically, it introduced an ad hoc method to implement localization through a modified version of the AHLoS system. In this system, each node starts unlocalized or localized, and the localized nodes serve as reference points to the unlocalized nodes. Once there was enough information, the unlocalized nodes could determine a translation–rotation matrix from the relative position to the global reference frame. This was performed using a nonlinear least squares function, which also accounts for the tag sensor’s offset range measurements. The second phase of the paper transitioned to the UKF-based measurement data refinement stage, where both the globally translated odometry and the offset range measurements were fed into a CTRV motion-based UKF model to improve the long-term accuracy of the positioning system. Simulations were conducted to help provide proof of validity to the algorithms.
The current system assumes a 2D setup for the robot, which would cause inaccuracies in an inclined outdoor situation as the range estimation for the robot’s z value would not be correctly estimated, and the robot’s 3D dynamics would not be reflected. Another problem is that even though the possibility of obtaining an inaccurate initial position estimate decreases over time, there are no guarantees that the system will converge with this current system. More robust optimization systems will be explored in the future with explicit guarantees. In addition, the system still requires fine-tuning of specific constants, such as the initial P, Q, and R matrices of the UKF, the time horizon ‘T’, and the number of robots N for the initial localization, as suboptimal performance would be achieved if the system is not correctly estimated.
In the future, the UKF will extend the account for the robot’s yaw, pitch, and roll to better account for the diverse terrain and not assume that it was on flat terrain. To further improve the accuracy, additional sensors could be used, such as cameras and land-based markers to obtain a better position estimate and optical flow sensors to improve the velocity calculations, which will help further improve the UKF results. In addition, the development of the initial position algorithm to account for a wider variety of scenarios and improve the overall accuracy will be explored. Furthermore, a more robust adaptive Kalman filter approach for UWB sensors could be used to account for multipath and non-line-of-sight (NLOS) measurement error, which will be explored to account for a more extensive range of terrain and reduce overall position error. Finally, the current results of the paper were demonstrated in a simulated environment. Future work will be performed to demonstrate the algorithm’s feasibility in the real world.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}