
Inspection of Floating Offshore Wind Turbines Using Multi-Rotor Unmanned Aerial Vehicles: Literature Review and Trends




Abstract
1. Introduction
1.1. Background of FOWT
1.2. Importance of O&M
1.3. Classification of UAV
1.4. Existing Literature Reviews of Infrastructure Inspection Using UAVs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Inspection Method | Target | Mission | Year |
|---|---|---|---|---|
| [60] | Permanent sensor | Onshore and offshore wind turbines | Health monitoring | 2015 |
| [36] | ROV, AUV, AGV, ASV, UAV | Offshore oil and gas | Explorations Inspection Welding Oil spill | 2016 |
| [61] | UAV | Building | Inspection | 2018 |
| [62] | UAV | Mining area | 3D modeling Land damage assessment, geological hazards | 2019 |
| [63] | UAV | Bridge | Quantify damage using images captured from UAVs | 2020 |
| [64] | UAV | Onshore and offshore wind turbines | Non- destructive testing | 2020 |
| [65] | UAV | Large infrastructures | UAV-based NDI of industrial and commercial facilities | 2021 |
| [59] | UAV | Civil infrastructure as well as industrial facilities and power plants | Structural health monitoring and management | |
| [66] | ROV, AUV, UAV, climbing robot | Offshore wind turbines | Robot-based damage assessment | 2022 |
| [67] | UAV, USV, AUV, ASV, AGV, climbing robot, quadruped robot, railed robot | Offshore wind turbine | Robotics and artificial intelligence | 2022 |
| [38] | ROV, ASV, UAV, climbing robot | Floating offshore wind turbines | Applications of robotics for O&M | 2022 |
| [68] | AUV, ASV, UAV | Offshore wind turbines | Collaborative unmanned vehicles | 2022 |
| [69] | UAV, climbing robot | Onshore and offshore wind turbines | Non-destructive testing | 2022 |
| [70] | UAV | Tunnel | Localization and navigation of UAVs in underground | 2023 |
| [40] | UAV | Onshore and offshore wind farm | Atmosphere measurement | 2023 |
1.5. Scope of the Review
- Emphasizing the importance of reducing O&M costs for the FOWT industry;
- Examining previously conducted projects in different industries that could potentially be applied within FOWT inspection operations;
- Assessing the prospect of UAV usage by analyzing the long and short advantages of different methods;
- Introducing the working principles of RGB cameras, thermal imaging sensors, light detection and ranging (LiDAR), ultrasonic sensors, and their functions and applications in inspection. Additionally, introducing the status and prospects of applying these sensors to FOWT inspection;
- Introducing the development history and characteristics of UAVs and providing the future research direction of UAVs in the field of FOWT.
2. Inspection of FOWTs
2.1. Fault Types and Fault Detection Techniques of FOWTs
- Shaft: shaft imbalance, shaft misalignment, shaft damage, and shaft breakage [75];
- Gearbox: wear, fatigue, pitting, gear tooth damage, tooth braking, eccentricity of toothed wheels, displacement, oil leakage, insufficient lubrication, high oil temperature, and inadequate lubrication [76];
- Generator: overspeed, overheating, wear, excessive vibration, rotor asymmetries, bar breaks, electrical issues, insulation damage, slip rings, winding damage, and abnormal noises [77];
- Bearings: overheating, spalling, wear, bearing shell defects, and bearing damage [78]
- Nacelle: fire outbreaks and yaw errors [79]
- Tower: fatigue, vibration, foundation weakness, and crack formation [80].
2.2. Existing Inspection Methods of FOWTs

2.3. Comparison of Different Methods
3. UAV Techniques and Applications in FOWTs Inspection
3.1. UAVs’ Development and Applications in Industries
3.2. Payload Hardware and Its Functions in Inspection

3.3. Control of UAV in Inspection
3.3.1. Classification of UAV Automation Levels
3.3.2. Control Algorithm
3.3.3. Localization and Navigation
3.4. Applications of UAVs in FOWTs Inspection
4. Challenges and Future of Prospects Results
4.1. Challenges of Applying UAVs in FOWT Inspections
4.1.1. Payload Capacity and Duration Time
4.1.2. Need of Contact Measurement
4.1.3. Policy and Law
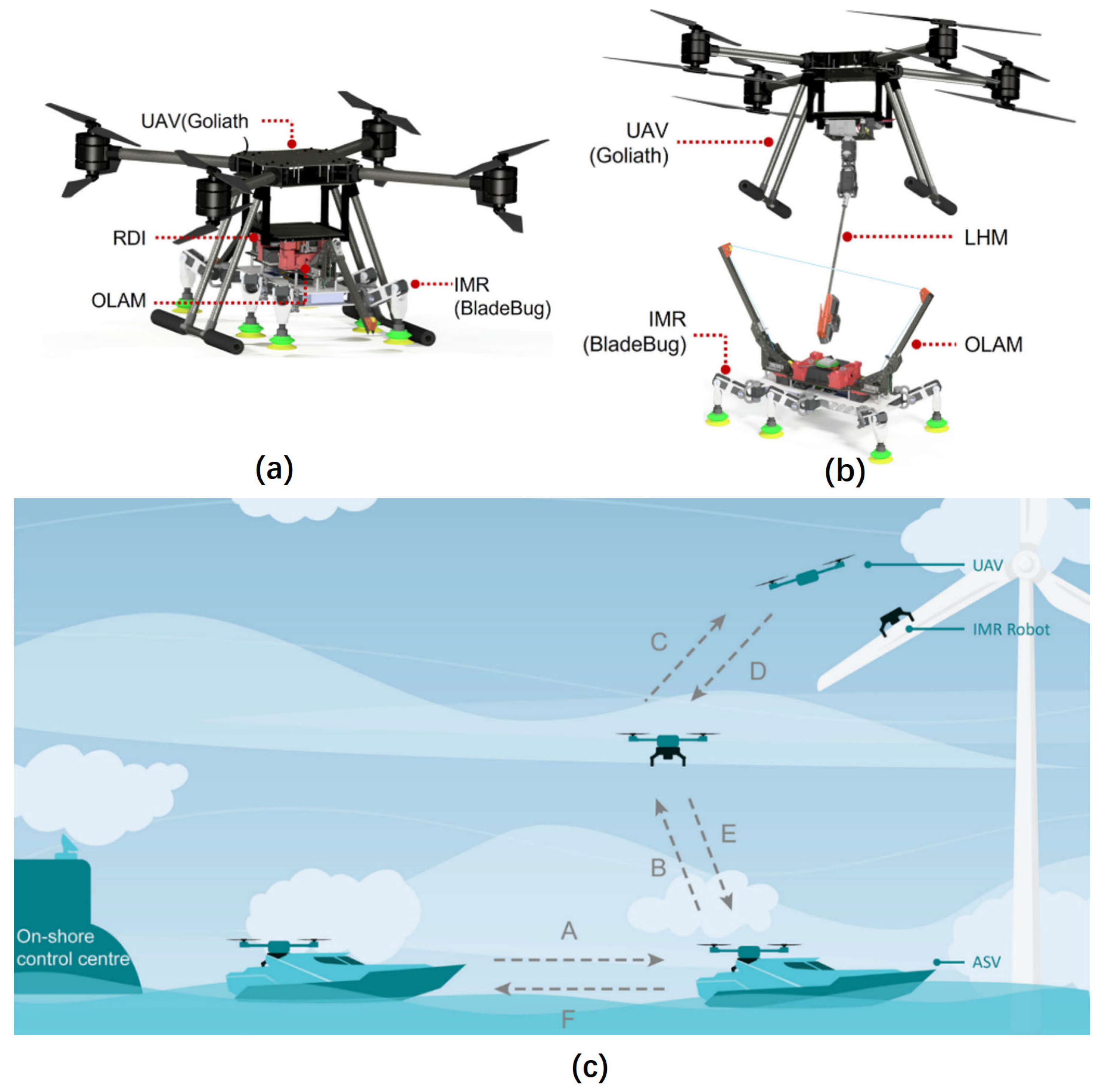
4.2. Solution 1: Multi-Robot System
4.3. Solution 2: Contact Inspection Method
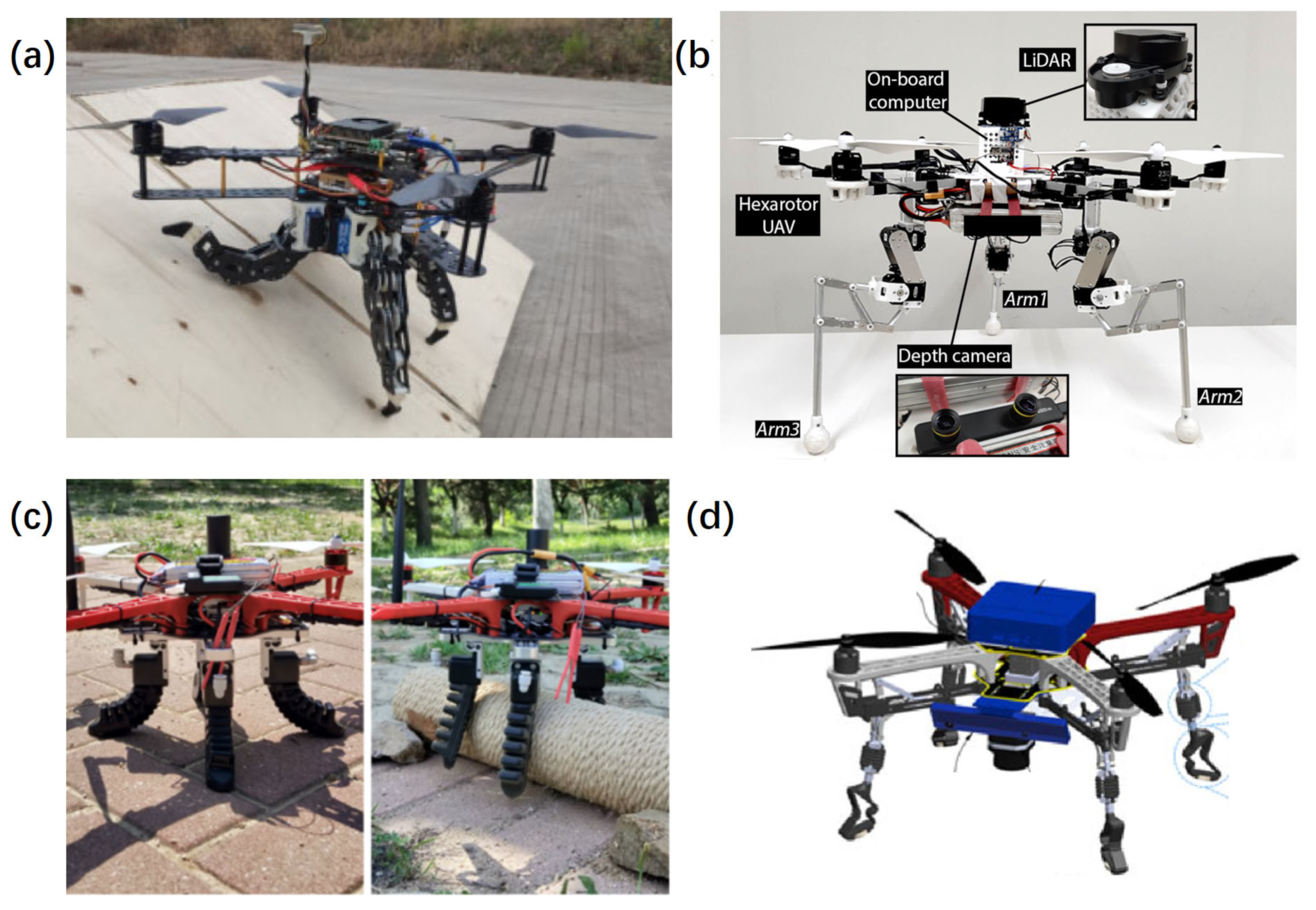
4.3.1. Landing Contact
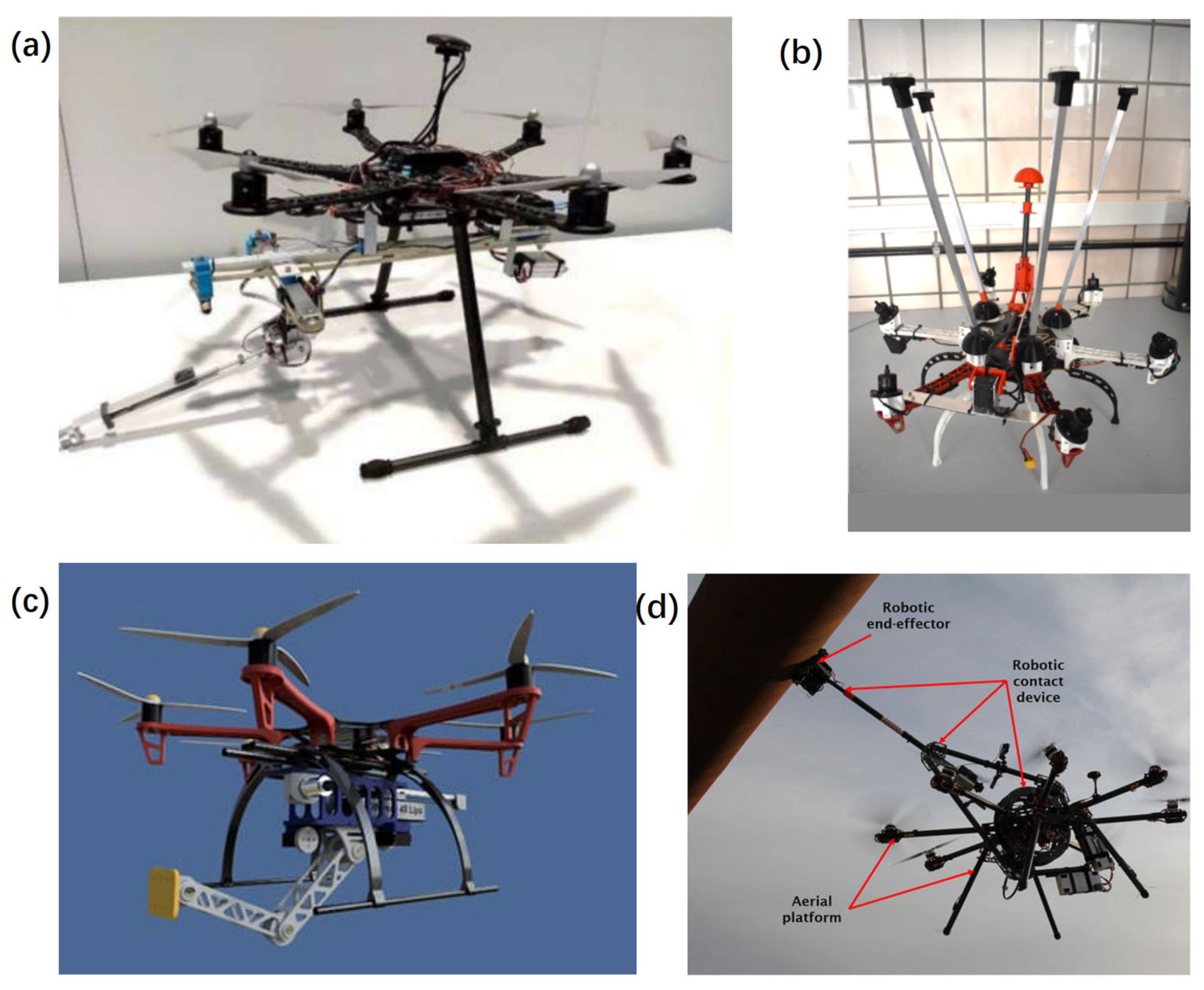
4.3.2. Aerial Manipulator
- Due to asymmetry, it is impossible to maintain the center of gravity of the UAV in the geometric center, resulting in wasted power, increased control difficulty, and increased risk.
- The connection between the UAV and the detected object is rigid, but the UAV needs to constantly adjust its attitude to move and maintain stability. And the movement of motors, propellers, and other components creates constant noise, which makes the contact unstable and affects the work of the sensor.
- The weight of these air manipulators is very large, and the movement inertia is also very large, which will cause a large disturbance to the UAV during the inspection and reduce its endurance.
4.3.3. Parallel Aerial Manipulator
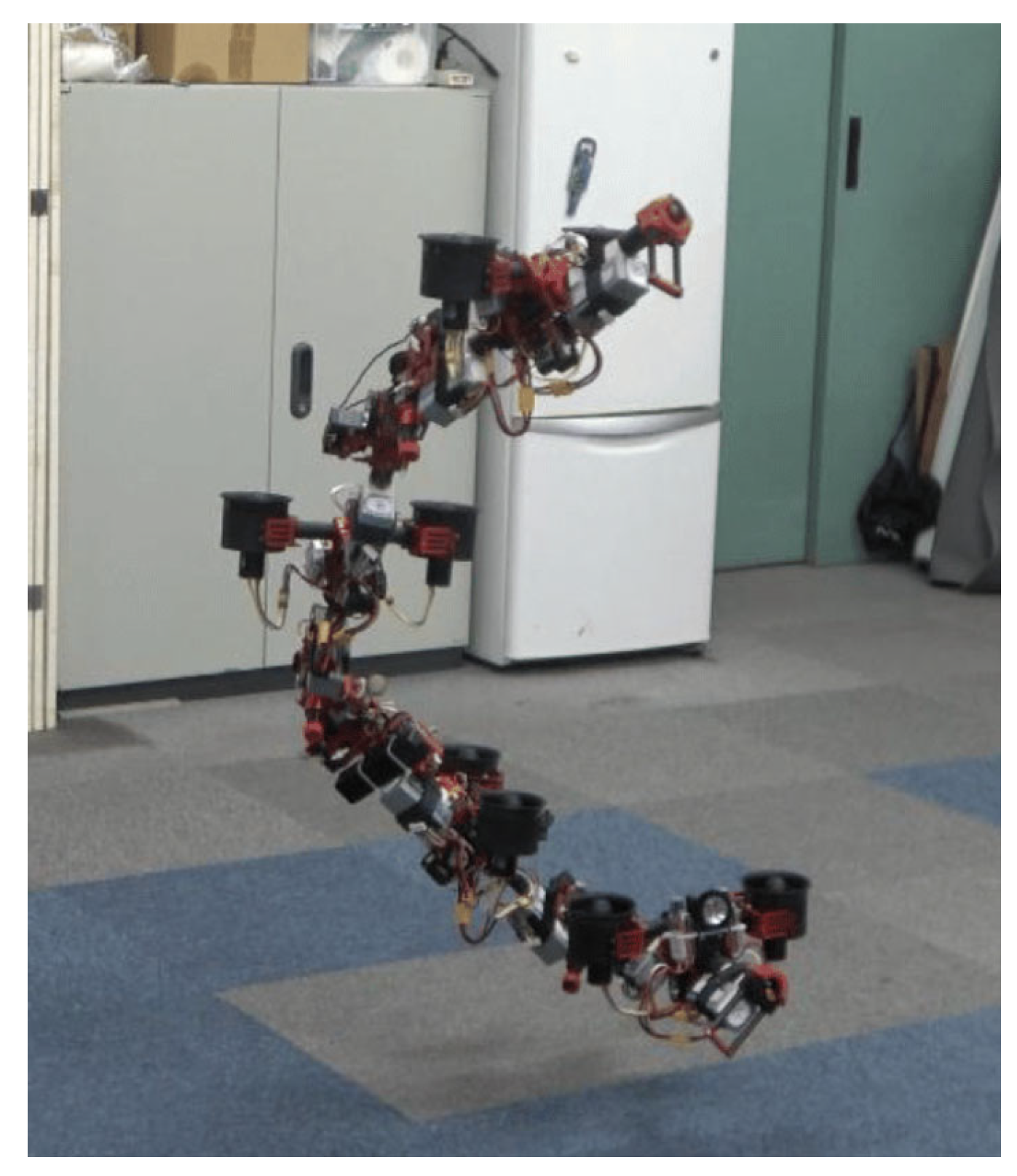
4.3.4. Rotor-Distributed Manipulator
4.4. Prospects of UAV-Based Inspection
5. Conclusions
- Using UAVs instead of conventional manual inspection methods offers significant cost reduction for FOWT inspection, minimizes downtime, and ultimately contributes to lowering the unit energy price, fostering sustainable societal development. Additionally, it can play a pivotal role in mitigating H&S hazards;
- Compared with other robotic systems and permanent sensor CM systems, UAVs are the most promising competitors for future development due to their low cost, fast deployment, high mobility, and strong reusability;
- The current applications of UAVs in FOWT inspection predominantly utilize computer vision, infrared, and LiDAR technologies, focusing on non-contact measurements. The primary research efforts have centered around visual algorithms, resulting in significant innovations in this area. However, there is limited exploration of other sensing techniques, such as vibration analysis and ultrasonic, as well as emphasis on innovations in UAV mechanical design, embedded systems, and multi-sensor fusion;
- UAV contact-based measurement methods are in their early stages, with some research already conducted, but there remains ample room for further advancements. The combination of UAV and parallel aerial manipulator is a promising research direction in the future;
- Since the inherent defects of a single robotic platform, including UAV, are difficult to overcome, the use of multi-robot systems for UAV inspection of FOWTs is a promising avenue that remains largely unexplored.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AGV | Automated guided vehicle |
| AI | Artificial intelligence |
| ASV | Autonomous surface vessel |
| AUV | Autonomous underwater vessel |
| CAGR | Compound annual growth rate |
| CM | Condition monitoring |
| FOWT | Floating offshore wind turbine |
| GNSS | Global navigation satellite system |
| GPS | Global positioning system |
| H&S | Health and safety |
| IBVS | Image-based visual servoing |
| IMU | Inertial measurement unit |
| IoT | Internet of Things |
| IRT | Infrared thermography |
| LCOE | Levelized cost of energy |
| LiDAR | Light detection and ranging |
| MEMS | Micro-electro-mechanical system |
| NDT | Non-destructive testing |
| O&M | Operation and maintenance |
| RDM | Rotor-distributed manipulator |
| RF | Radio frequency |
| ROV | Remotely operated vehicle |
| SLAM | Simultaneous localization and mapping |
| UAS | Unmanned aerial system |
| UAV | Unmanned aerial vehicle |
| UMS | Unmanned systems |
| USV | Unmanned surface vehicle |
| UWB | Ultra-wideband |
| VLOS | Visual line of sight |
References
- Díaz, H.; Guedes Soares, C. Review of the Current Status, Technology and Future Trends of Offshore Wind Farms. Ocean Eng. 2020, 209, 107381. [Google Scholar] [CrossRef]
- Energy Transition Outlook 2023. Available online: https://www.dnv.com/energy-transition-outlook/special-reports.html (accessed on 25 January 2024).
- Lee, J.; Zhao, F. GWEC Global Wind Report; Global Wind Energy Council: Brussels, Belgium, 2022; p. 156. Available online: Https://www.gwec.net (accessed on 25 January 2024).
- Esteban, M.D.; Diez, J.J.; López, J.S.; Negro, V. Why Offshore Wind Energy? Renew. Energy 2011, 36, 444–450. [Google Scholar] [CrossRef]
- Röckmann, C.; Lagerveld, S.; Stavenuiter, J. Operation and Maintenance Costs of Offshore Wind Farms and Potential Multi-Use Platforms in the Dutch North Sea BT—Aquaculture Perspective of Multi-Use Sites in the Open Ocean: The Untapped Potential for Marine Resources in the Anthropocene; Buck, B.H., Langan, R., Eds.; Springer International Publishing: Cham, Germany, 2017; pp. 97–113. ISBN 978-3-319-51159-7. [Google Scholar]
- BVG Associates. A Guide to an Offshore Wind Farm Updated and Extended. Crown Estate Offshore Renew. Energy Catapult 2019, 1–70. [Google Scholar]
- Musial, W.; Butterfield, S. National Renewable Energy Laboratory (NREL). In Proceedings of the Future for Offshore Wind Energy in the United States, Palm Beach, FL, USA, 29 June 2004; Available online: https://www.osti.gov/biblio/15007876 (accessed on 25 January 2024).
- Wang, C.M.; Utsunomiya, T.; Wee, S.C.; Choo, Y.S. Research on Floating Wind Turbines: A Literature Survey. IES J. Part A Civ. Struct. Eng. 2010, 3, 267–277. [Google Scholar] [CrossRef]
- Henderson, A.; Witcher, D. Floating Offshore Wind Energy—A Review of the Current Status and an Assessment of the Prospects. Wind Eng. 2010, 34, 1–16. [Google Scholar] [CrossRef]
- Muskulus, M.; Schafhirt, S. Design Optimization of Wind Turbine Support Structures-A Review. J. Ocean Wind Energy 2014, 1, 12–22. [Google Scholar]
- Stewart, G.; Muskulus, M. A Review and Comparison of Floating Offshore Wind Turbine Model Experiments. Energy Procedia 2016, 94, 227–231. [Google Scholar] [CrossRef]
- Liu, Y.; Li, S.; Yi, Q.; Chen, D. Developments in Semi-Submersible Floating Foundations Supporting Wind Turbines: A Comprehensive Review. Renew. Sustain. Energy Rev. 2016, 60, 433–449. [Google Scholar] [CrossRef]
- Leimeister, M.; Kolios, A.; Collu, M. Critical Review of Floating Support Structures for Offshore Wind Farm Deployment. J. Phys. Conf. Ser. 2018, 1104, 012007. [Google Scholar] [CrossRef]
- Wu, X.; Hu, Y.; Li, Y.; Yang, J.; Duan, L.; Wang, T.; Adcock, T.; Jiang, Z.; Gao, Z.; Lin, Z.; et al. Foundations of Offshore Wind Turbines: A Review. Renew. Sustain. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef]
- Chen, P.; Chen, J.; Hu, Z. Review of Experimental-Numerical Methodologies and Challenges for Floating Offshore Wind Turbines. J. Mar. Sci. Appl. 2020, 19, 339–361. [Google Scholar] [CrossRef]
- Chitteth Ramachandran, R.; Desmond, C.; Judge, F.; Serraris, J.J.; Murphy, J. Floating Wind Turbines: Marine Operations Challenges and Opportunities. Wind Energy Sci. 2022, 7, 903–924. [Google Scholar] [CrossRef]
- Barooni, M.; Ashuri, T.; Velioglu Sogut, D.; Wood, S.; Ghaderpour Taleghani, S. Floating Offshore Wind Turbines: Current Status and Future Prospects. Energies 2023, 16, 2. [Google Scholar] [CrossRef]
- Bashetty, S.; Ozcelik, S. Review on Dynamics of Offshore Floating Wind Turbine Platforms. Energies 2021, 14, 6026. [Google Scholar] [CrossRef]
- Ferri, G.; Marino, E.; Borri, C. Optimal Dimensions of a Semisubmersible Floating Platform for a 10 MW Wind Turbine. Energies 2020, 13, 3092. [Google Scholar] [CrossRef]
- Ishihara, T.; Liu, Y. Dynamic Response Analysis of a Semi-Submersible Floating Wind Turbine in Combined Wave and Current Conditions Using Advanced Hydrodynamic Models. Energies 2020, 13, 5820. [Google Scholar] [CrossRef]
- Veers, P.; Dykes, K.; Lantz, E.; Barth, S.; Bottasso, C.L.; Carlson, O.; Clifton, A.; Green, J.; Green, P.; Holttinen, H.; et al. Grand Challenges in the Science of Wind Energy. Science 2019, 366, eaau2027. [Google Scholar] [CrossRef]
- Walter Musial, National Renewable Energy Laboratory (NREL). Offshore Wind Market Report: 2023 Edition; U.S. Department of Energy: Washington, DC, USA, 2023. Available online: https://www.osti.gov/biblio/2001112 (accessed on 25 January 2024).
- Maples, B.; Saur, G.; Hand, M.; van Pietermen, R.; Obdam, T. Installation, Operation, and Maintenance Strategies to Reduce the Cost of Offshore Wind Energy; NREL/TP-50000-57403; National Renewable Energy Laboratory: Golden CO, USA, 2013; pp. 1–106. [Google Scholar]
- McMorland, J.; Collu, M.; McMillan, D.; Carroll, J. Operation and Maintenance for Floating Wind Turbines: A Review. Renew. Sustain. Energy Rev. 2022, 163, 112499. [Google Scholar] [CrossRef]
- Stehly, T.; Duffy, P. 2021 Cost of Wind Energy Review; National Renewable Energy Laboratory: Golden CO, USA, 2021; p. 68. [Google Scholar]
- Stehly, T.; Duffy, P. 2020 Cost of Wind Energy Review; National Renewable Energy Laboratory: Golden CO, USA, 2020; p. 68. [Google Scholar]
- SkyQuest. Global Wind Turbine Operations And Maintenance Market Size 2023; SkyQuest Technology Consulting Pvt. Ltd.: Westford, MA, USA, 2022. Available online: https://www.skyquestt.com/report/wind-turbine-operations-and-maintenance-market (accessed on 25 January 2024).
- Ren, Z.R.; Verma, A.S.; Li, Y.; Teuwen, J.J.E.; Jiang, Z.Y. Offshore Wind Turbine Operations and Maintenance: A State-of-the-Art Review. Renew. Sustain. Energy Rev. 2021, 144, 110886. [Google Scholar] [CrossRef]
- Butterfield, S.; Musial, W.; Jonkman, J.; Sclavounos, P.; Wayman, L. National Renewable Energy Laboratory (NREL). Engineering Challenges for Floating Offshore Wind Turbines; U.S. Department of Energy, U.S.: Washington, DC, USA, 2005. Available online: https://www.nrel.gov/docs/fy07osti/38776.pdf (accessed on 25 January 2024).
- Jonkman, J.M. Dynamics of Offshore Floating Wind Turbines-Model Development and Verification. Wind Energy 2009, 12, 459–492. [Google Scholar] [CrossRef]
- Kang, J.; Sobral, J.; Soares, C.G. Review of Condition-Based Maintenance Strategies for Offshore Wind Energy. J. Mar. Sci. Appl. 2019, 18, 1–16. [Google Scholar] [CrossRef]
- Máthé, K.; Buşoniu, L. Vision and Control for UAVs: A Survey of General Methods and of Inexpensive Platforms for Infrastructure Inspection. Sensors 2015, 15, 14887–14916. [Google Scholar] [CrossRef] [PubMed]
- Mustafa, A.M.; Al-Mahadin, A. Risk Assessment of Hazards Due to the Installation and Maintenance of Onshore Wind Turbines. In Proceedings of the 2018 Advances in Science and Engineering Technology International Conferences (ASET), Abu Dhabi, United Arab Emirates, 6 February–5 April 2018; pp. 1–7. [Google Scholar]
- Moore, A.J.; Schubert, M.; Rymer, N. Autonomous Inspection of Electrical Transmission Structures with Airborne UV Sensors: NASA Report on Dominion Virginia Power Flights of November 2016; National Aeronautics and Space Administration, Langley Research Center: Hampton, VA, USA, 2017. Available online: https://ntrs.nasa.gov/citations/20170004692 (accessed on 25 January 2024).
- Xie, X.; Liu, Z.; Xu, C.; Zhang, Y. A Multiple Sensors Platform Method for Power Line Inspection Based on a Large Unmanned Helicopter. Sensors 2017, 17, 1222. [Google Scholar] [CrossRef] [PubMed]
- Shukla, A.; Karki, H. Application of Robotics in Offshore Oil and Gas Industry-A Review Part II. Rob. Auton. Syst. 2016, 75, 508–524. [Google Scholar] [CrossRef]
- Rinaldi, G.; Thies, P.R.; Johanning, L. Current Status and Future Trends in the Operation and Maintenance of Offshore Wind Turbines: A Review. Energies 2021, 14, 2484. [Google Scholar] [CrossRef]
- Khalid, O.; Hao, G.; Desmond, C.; Macdonald, H.; McAuliffe, F.D.; Dooly, G.; Hu, W. Applications of Robotics in Floating Offshore Wind Farm Operations and Maintenance: Literature Review and Trends. Wind Energy 2022, 25, 1880–1899. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z.T.H. State-of-the-Art Technologies for UAV Inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Sasse, R.; Hirst, C.A.; Frew, E.; Argrow, B. A Survey on Applications of Small Uncrewed Aircraft Systems for Offshore Wind Farms. EGUsphere 2023, 2023, 1–23. [Google Scholar]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The Use of Unmanned Aerial Vehicles (UAVs) for Engineering Geology Applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Towards Fully Autonomous UAVs: A Survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef]
- Cai, G.; Peng, K.; Chen, B.; Lee, T.H. Design and Assembling of a UAV Helicopter System. In Proceedings of the 2005 International Conference on Control and Automation, Budapest, Hungary, 26–29 June 2005; ISBN 0-7803-9137-3. [Google Scholar]
- Cai, G.; Feng, L.; Chen, B.M.; Lee, T.H. Systematic Design Methodology and Construction of UAV Helicopters. Mechatronics 2008, 18, 545–558. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor Aerial Vehicles: Modeling, Estimation, and Control of Quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Segui-Gasco, P.; Al-Rihani, Y.; Shin, H.S.; Savvaris, A. A Novel Actuation Concept for a Multi Rotor UAV. J. Intell. Robot. Syst. Theory Appl. 2014, 74, 173–191. [Google Scholar] [CrossRef]
- Kamel, M.; Verling, S.; Elkhatib, O.; Sprecher, C.; Wulkop, P.; Taylor, Z.; Siegwart, R.; Gilitschenski, I. The Voliro Omniorientational Hexacopter: An Agile and Maneuverable Tiltable-Rotor Aerial Vehicle. IEEE Robot. Autom. Mag. 2018, 25, 34–44. [Google Scholar] [CrossRef]
- Gursul, I. Introduction to the Design of Fixed-Wing Micro Air Vehicles: Including Three Case Studies TJ Mueller et al.American Institute of Aeronautics and Astronautics, 1801 Alexander Bell Drive, Suite 500, Reston, VA 20191-4344, USA. 2007. 287pp. Illustrated. 84.95 (Non-Members). ISBN 1-56347-849-8. Aeronaut. J. 2007, 111, 405. [Google Scholar] [CrossRef]
- Zhao, A.; He, D.; Wen, D. Structural Design and Experimental Verification of a Novel Split Aileron Wing. Aerosp. Sci. Technol. 2020, 98, 105635. [Google Scholar] [CrossRef]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a Commercial Hybrid VTOL UAV System. J. Intell. Robot. Syst. Theory Appl. 2014, 74, 371–393. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M.; Aksit, M.F. Design and Construction of a Novel Quad Tilt-Wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A.; Wei, M.; Ziaei-Rad, S. A Novel Methodology for Wing Sizing of Bio-Inspired Flapping Wing Micro Air Vehicles: Theory and Prototype. Acta Mech. 2017, 228, 1097–1113. [Google Scholar] [CrossRef]
- Gerdes, J.; Holness, A.; Perez-Rosado, A.; Roberts, L.; Greisinger, A.; Barnett, E.; Kempny, J.; Lingam, D.; Yeh, C.-H.; Bruck, H.A.; et al. Robo Raven: A Flapping-Wing Air Vehicle with Highly Compliant and Independently Controlled Wings. Soft Robot. 2014, 1, 275–288. [Google Scholar] [CrossRef]
- Gerdes, J.W.; Gupta, S.K.; Wilkerson, S.A. A Review of Bird-Inspired Flapping Wing Miniature Air Vehicle Designs. J. Mech. Robot. 2012, 4, 021003. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 33–35. [Google Scholar] [CrossRef]
- de Croon, G.C.H.E.; Groen, M.A.; De Wagter, C.; Remes, B.; Ruijsink, R.; van Oudheusden, B.W. Design, Aerodynamics and Autonomy of the DelFly. Bioinspir. Biomim. 2012, 7, 25003. [Google Scholar] [CrossRef] [PubMed]
- Zong, J.; Zhu, B.; Hou, Z.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. [Google Scholar] [CrossRef]
- Kapoor, M.; Katsanos, E.; Nalpantidis, L.; Winkler, J.; Thöns, S. Structural Health Monitoring and Management with Unmanned Aerial Vehicles Review and Potentials. Citation 2021. [Google Scholar] [CrossRef]
- Wymore, M.L.; Van Dam, J.E.; Ceylan, H.; Qiao, D. A Survey of Health Monitoring Systems for Wind Turbines. Renew. Sustain. Energy Rev. 2015, 52, 976–990. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) Applications in the Built Environment: Towards Automated Building Inspection Procedures Using Drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A Review of UAV Monitoring in Mining Areas: Current Status and Future Perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef]
- Jeong, E.; Seo, J.; Wacker, J. Literature Review and Technical Survey on Bridge Inspection Using Unmanned Aerial Vehicles. J. Perform. Constr. Facil. 2020, 34, 04020113. [Google Scholar] [CrossRef]
- García Márquez, F.P.; Peco Chacón, A.M. A Review of Non-Destructive Testing on Wind Turbines Blades. Renew. Energy 2020, 161, 998–1010. [Google Scholar] [CrossRef]
- Nooralishahi, P.; Ibarra-Castanedo, C.; Deane, S.; López, F.; Pant, S.; Genest, M.; Avdelidis, N.P.; Maldague, X.P.V. Drone-Based Non-Destructive Inspection of Industrial Sites: A Review and Case Studies. Drones 2021, 5, 106. [Google Scholar] [CrossRef]
- Liu, Y.; Hajj, M.; Bao, Y. Review of Robot-Based Damage Assessment for Offshore Wind Turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Mitchell, D.; Blanche, J.; Harper, S.; Lim, T.; Gupta, R.; Zaki, O.; Tang, W.; Robu, V.; Watson, S.; Flynn, D. A Review: Challenges and Opportunities for Artificial Intelligence and Robotics in the Offshore Wind Sector. Energy AI 2022, 8, 100146. [Google Scholar] [CrossRef]
- Nordin, M.H.; Sharma, S.; Khan, A.; Gianni, M.; Rajendran, S.; Sutton, R. Collaborative Unmanned Vehicles for Inspection, Maintenance, and Repairs of Offshore Wind Turbines. Drones 2022, 6, 137. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. Non-Destructive Techniques for the Condition and Structural Health Monitoring of Wind Turbines: A Literature Review of the Last 20 Years. Sensors 2022, 22, 1627. [Google Scholar] [CrossRef]
- Zhang, R.; Hao, G.; Zhang, K.; Li, Z. Unmanned Aerial Vehicle Navigation in Underground Structure Inspection: A Review. Geol. J. 2023, 58, 2454–2472. [Google Scholar] [CrossRef]
- Luengo, M.M.; Kolios, A. Failure Mode Identification and End of Life Scenarios of Offshore Wind Turbines: A Review. Energies 2015, 8, 8339–8354. [Google Scholar] [CrossRef]
- Wen, B.; Li, Z.; Jiang, Z.; Tian, X.; Dong, X.; Peng, Z. Blade Loading Performance of a Floating Wind Turbine in Wave Basin Model Tests. Ocean Eng. 2020, 199, 107061. [Google Scholar] [CrossRef]
- Chou, J.S.; Chiu, C.K.; Huang, I.K.; Chi, K.N. Failure Analysis of Wind Turbine Blade under Critical Wind Loads. Eng. Fail. Anal. 2013, 27, 99–118. [Google Scholar] [CrossRef]
- Wang, W.; Xue, Y.; He, C.; Zhao, Y. Review of the Typical Damage and Damage-Detection Methods of Large Wind Turbine Blades. Energies 2022, 15, 5672. [Google Scholar] [CrossRef]
- Zhang, Z.; Yin, Z.; Han, T.; Tan, A.C.C. Fracture Analysis of Wind Turbine Main Shaft. Eng. Fail. Anal. 2013, 34, 129–139. [Google Scholar] [CrossRef]
- Bhardwaj, U.; Teixeira, A.P.; Soares, C.G. Reliability Prediction of an Offshore Wind Turbine Gearbox. Renew. Energy 2019, 141, 693–706. [Google Scholar] [CrossRef]
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in Wind Turbine Generator Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Herp, J.; Ramezani, M.H.; Bach-Andersen, M.; Pedersen, N.L.; Nadimi, E.S. Bayesian State Prediction of Wind Turbine Bearing Failure. Renew. Energy 2018, 116, 164–172. [Google Scholar] [CrossRef]
- Islam, M.R.; Guo, Y.; Zhu, J. A Review of Offshore Wind Turbine Nacelle: Technical Challenges, and Research and Developmental Trends. Renew. Sustain. Energy Rev. 2014, 33, 161–176. [Google Scholar] [CrossRef]
- Li, M.; Kefal, A.; Oterkus, E.; Oterkus, S. Structural Health Monitoring of an Offshore Wind Turbine Tower Using IFEM Methodology. Ocean Eng. 2020, 204, 107291. [Google Scholar] [CrossRef]
- Turnbull, A.; Carroll, J. Cost Benefit of Implementing Advanced Monitoring and Predictive Maintenance Strategies for Offshore Wind Farms. Energies 2021, 14, 4922. [Google Scholar] [CrossRef]
- Uma Maheswari, R.; Umamaheswari, R. Trends in Non-Stationary Signal Processing Techniques Applied to Vibration Analysis of Wind Turbine Drive Train—A Contemporary Survey. Mech. Syst. Signal Process. 2017, 85, 296–311. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.; Jiang, Y.; Tang, Y. Typhoon Resistance Analysis of Offshore Wind Turbines: A Review. Atmosphere 2022, 13, 451. [Google Scholar] [CrossRef]
- Jüngert, A. Damage Detection in Wind Turbine Blades Using Two Different Acoustic Techniques. NDT Database J. NDT 2008, 2075. [Google Scholar]
- Stokkeland, M.; Klausen, K.; Johansen, T.A. Autonomous Visual Navigation of Unmanned Aerial Vehicle for Wind Turbine Inspection. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 998–1007. [Google Scholar]
- Hallermann, N.; Morgenthal, G. Unmanned Aerial Vehicles (UAV) for the Assessment of Existing Structures. Long Span Bridg. Roofs Dev. Des. Implement. 2013, 101, 1–8. [Google Scholar] [CrossRef]
- Hu, W.; Barthelmie, R.J.; Letson, F.; Pryor, S.C. A New Seismic-Based Monitoring Approach for Wind Turbines. Wind Energy 2019, 22, 473–486. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater Manipulators: A Review. Ocean Eng. J. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Sivčev, S.; Rossi, M.; Coleman, J.; Dooly, G.; Omerdić, E.; Toal, D. Control Engineering Practice Fully Automatic Visual Servoing Control for Work-Class Marine Intervention ROVs. Control Eng. Pract. 2018, 74, 153–167. [Google Scholar] [CrossRef]
- Feng, Z. Autonomous Underwater Vehicle (AUV) BT-Encyclopedia of Ocean Engineering; Cui, W., Fu, S., Hu, Z., Eds.; Springer Nature: Singapore, 2022; pp. 82–89. ISBN 978-981-10-6946-8. [Google Scholar]
- Schmidt, D.; Berns, K. Climbing Robots for Maintenance and Inspections of Vertical Structures A Survey of Design Aspects and Technologies. Rob. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar] [CrossRef]
- Liu, J.H.; Padrigalan, K. Design and Development of a Climbing Robot for Wind Turbine Maintenance. Appl. Sci. 2021, 11, 2328. [Google Scholar] [CrossRef]
- Khadka, A.; Fick, B.; Afshar, A.; Tavakoli, M.; Baqersad, J. Non-Contact Vibration Monitoring of Rotating Wind Turbines Using a Semi-Autonomous UAV. Mech. Syst. Signal Process. 2020, 138, 106446. [Google Scholar] [CrossRef]
- Car, M.; Markovic, L.; Ivanovic, A.; Orsag, M.; Bogdan, S. Autonomous Wind-Turbine Blade Inspection Using LiDAR-Equipped Unmanned Aerial Vehicle. IEEE Access 2020, 8, 131380–131387. [Google Scholar] [CrossRef]
- Bernardini, S.; Jovan, F.; Jiang, Z.; Watson, S.; Moradi, P.; Richardson, T.; Sadeghian, R.; Sareh, S. A Multi-Robot Platform for the Autonomous Operation and Maintenance of Offshore Wind Farms Blue Sky Ideas Track. Proc. Int. Jt. Conf. Auton. Agents Multiagent Syst. AAMAS 2020, 2020, 1696–1700. [Google Scholar]
- Perera, R.; Pérez, A.; García-Diéguez, M.; Zapico-Valle, J.L. Active Wireless System for Structural Health Monitoring Applications. Sensors 2017, 17, 2880. [Google Scholar] [CrossRef]
- Sivčev, S.; Rossi, M.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Collision Detection for Underwater ROV Manipulator Systems. Sensors 2018, 18, 1117. [Google Scholar] [CrossRef]
- Jiang, Z.; Jovan, F.; Moradi, P.; Richardson, T.; Bernardini, S.; Watson, S.; Weightman, A.; Hine, D. A Multirobot System for Autonomous Deployment and Recovery of a Blade Crawler for Operations and Maintenance of Offshore Wind Turbine Blades. J. F. Robot. 2023, 40, 73–93. [Google Scholar] [CrossRef]
- Yang, W.; Tavner, P.J.; Crabtree, C.J.; Feng, Y.; Qiu, Y. Wind Turbine Condition Monitoring: Technical and Commercial Challenges. Wind Energy 2014, 17, 673–693. [Google Scholar] [CrossRef]
- Hameed, Z.; Hong, Y.S.; Cho, Y.M.; Ahn, S.H.; Song, C.K. Condition Monitoring and Fault Detection of Wind Turbines and Related Algorithms: A Review. Renew. Sustain. Energy Rev. 2009, 13, 1–39. [Google Scholar] [CrossRef]
- Antoniadou, I.; Dervilis, N.; Papatheou, E.; Maguire, A.E.; Worden, K. Aspects of Structural Health and Condition Monitoring of Offshore Wind Turbines. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140075. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Luengo, M.; Kolios, A.; Wang, L. Structural Health Monitoring of Offshore Wind Turbines: A Review through the Statistical Pattern Recognition Paradigm. Renew. Sustain. Energy Rev. 2016, 64, 91–105. [Google Scholar] [CrossRef]
- Ghoshal, A.; Sundaresan, M.J.; Schulz, M.J.; Frank Pai, P. Structural Health Monitoring Techniques for Wind Turbine Blades. J. Wind Eng. Ind. Aerodyn. 2000, 85, 309–324. [Google Scholar] [CrossRef]
- Wang, K.S.; Sharma, V.S.; Zhang, Z.Y. SCADA Data Based Condition Monitoring of Wind Turbines. Adv. Manuf. 2014, 2, 61–69. [Google Scholar] [CrossRef]
- Hamilton, A.; Quail, F. Detailed State of the Art Review for the Different Online/Inline Oil Analysis Techniques in Context of Wind Turbine Gearboxes. J. Tribol. 2011, 133, 044001. [Google Scholar] [CrossRef]
- Randall, R.B. State of the Art in Monitoring Rotating Machinery-Part 1. Sound Vib. 2004, 38, 14–21+13. [Google Scholar]
- Wiggelinkhuizen, E.; Verbruggen, T.; Braam, H.; Rademakers, L.; Xiang, J.; Watson, S. Assessment of Condition Monitoring Techniques for Offshore Wind Farms. J. Sol. Energy Eng. Trans. ASME 2008, 130, 0310041–0310049. [Google Scholar] [CrossRef]
- Nilsson, J.; Bertling, L. Maintenance Management of Wind Power Systems Using Condition Monitoring Systems. 2007 IEEE Power Eng. Soc. Gen. Meet. PES 2007, 22, 223–229. [Google Scholar] [CrossRef]
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind Turbine Condition Monitoring: State-of-the-Art Review, New Trends, and Future Challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. An Application of Instantaneous Spectral Entropy for the Condition Monitoring of Wind Turbines. Appl. Sci. 2022, 12, 1059. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. Instantaneous Spectral Entropy: An Application for the Online Monitoring of Multi-Storey Frame Structures. Buildings 2022, 12, 310. [Google Scholar] [CrossRef]
- Karga, S.M.; Hao, G. An Atlas of Piezoelectric Energy Harvesters in Oceanic Applications. Sensors 2022, 22, 1949. [Google Scholar] [CrossRef]
- Kargar, S.M.; Hao, G. A Drifter-Based Self-Powered Piezoelectric Sensor for Ocean Wave Measurements. Sensors 2022, 22, 5050. [Google Scholar] [CrossRef]
- Khalid, O.; Hao, G.; MacDonald, H.; Cooperman, A.; Devoy McAuliffe, F.; Desmond, C. Cost-Benefit Assessment Framework for Robotics-Driven Inspection of Floating Offshore Wind Farms. Wind Energy 2023, 27, 152–164. [Google Scholar] [CrossRef]
- Schwarzkopf, M.-A.; Borisade, F.; Matha, D.; Kallinger, M.D.; Mahfouz, M.Y.; Vicente, R.D.; Muñoz, S. Identification of Floating-Wind- Specific O & M Requirements and Monitoring Technologies. CORE WIND H2020 Proj. 2020, 1–98. [Google Scholar]
- Yuh, J.; Marani, G.; Blidberg, D.R. Applications of Marine Robotic Vehicles. Intell. Serv. Robot. 2011, 4, 221–231. [Google Scholar] [CrossRef]
- Chin, C.S.; Jia, J.; Hay King Chiew, J.; Da Toh, W.; Gao, Z.; Zhang, C.; McCann, J. System Design of Underwater Battery Power System for Marine and Offshore Industry. J. Energy Storage 2019, 21, 724–740. [Google Scholar] [CrossRef]
- Jasiobedzki, P.; Se, S.; Bondy, M.; Jakola, R. Underwater 3d Mapping and Pose Estimation for ROV Operations. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar] [CrossRef]
- Snyder, J. Doppler Velocity Log (DVL) Navigation for Observation-Class ROVs. MTS/IEEE Seattle, Ocean. 2010, 2010, 1–9. [Google Scholar] [CrossRef]
- Kilfoyle, D.B.; Baggeroer, A.B. State of the Art in Underwater Acoustic Telemetry. IEEE J. Ocean. Eng. 2000, 25, 4–27. [Google Scholar] [CrossRef]
- Antonelli, G. Motion and Force Control of Vehicle-Manipulator Systems. In Underwater Robots, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 2, ISBN 978-3-540-31752-4. [Google Scholar] [CrossRef]
- Chjølberg, I.; Utne, I.B. Towards Autonomy in ROV Operations. IFAC-PapersOnLine 2015, 28, 183–188. [Google Scholar] [CrossRef]
- Chutia, S.; Kakoty, N.M.; Deka, D. A Review of Underwater Robotics, Navigation, Sensing Techniques and Applications. In Proceedings of the 2017 3rd International Conference on Advances in Robotics, New York, NY, USA, 28 June–2 July 2017. [Google Scholar]
- Zhang, F.M.; Marani, G.; Smith, R.N.; Choi, H.T. Future Trends in Marine Robotics. IEEE Robot. Autom. Mag. 2015, 22, 14–122. [Google Scholar] [CrossRef]
- Zhao, C.Y.; Thies, P.; Lars, J.; Cowles, J. ROV Launch and Recovery from an Unmanned Autonomous Surface Vessel-Hydrodynamic Modelling and System Integration. Ocean Eng. 2021, 232, 109019. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Climbing with Directional Adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Haynes, G.C.; Khripiny, A.; Lynch, G.; Amory, J.; Saundersy, A.; Rizziy, A.A.; Koditschek, D.E. Rapid Pole Climbing with a Quadrupedal Robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2767–2772. [Google Scholar] [CrossRef]
- Sa, I.; Hrabar, S.; Corke, P. Inspection of Pole-like Structures Using a Vision-Controlled VTOL UAV and Shared Autonomy. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4819–4826. [Google Scholar] [CrossRef]
- Kadlec, P.; Gabrys, B.; Strandt, S. Data-Driven Soft Sensors in the Process Industry. Comput. Chem. Eng. 2009, 33, 795–814. [Google Scholar] [CrossRef]
- Fortuna, L.; Graziani, S.; Rizzo, A.; Xibilia, M.G. Soft Sensors for Monitoring and Control of Industrial Processes; Springer: Berlin/Heidelberg, Germany, 2007; Volume 22. [Google Scholar]
- Welburn, E.; Wright, T.; Marsh, C.; Lim, S.; Gupta, A.; Crowther, W.; Watson, S. A Mixed Reality Approach to Robotic Inspection of Remote Environments. In Proceedings of the UK-RAS19 Conference Embedded Intelligence: Enabling & Supporting RAS Technologies’ Proceedings, Leicester, UK, 24 January 2019; Volume 2, pp. 72–74. [Google Scholar] [CrossRef]
- Siguenza-Guzman, L.; Saquicela, V.; Avila-Ordóñez, E.; Vandewalle, J.; Cattrysse, D. Literature Review of Data Mining Applications in Academic Libraries. J. Acad. Librariansh. 2015, 41, 499–510. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Mohammadrezaei, M.; Hunt, J.; Zakeri, B. Internet of Things (IoT) and the Energy Sector. Energies 2020, 13, 494. [Google Scholar] [CrossRef]
- Liu, X.; Miao, X.; Jiang, H.; Chen, J. Data Analysis in Visual Power Line Inspection: An in-Depth Review of Deep Learning for Component Detection and Fault Diagnosis. Annu. Rev. Control 2020, 50, 253–277. [Google Scholar] [CrossRef]
- Stetco, A.; Dinmohammadi, F.; Zhao, X.; Robu, V.; Flynn, D.; Barnes, M.; Keane, J.; Nenadic, G. Machine Learning Methods for Wind Turbine Condition Monitoring: A Review. Renew. Energy 2019, 133, 620–635. [Google Scholar] [CrossRef]
- Duijm, N.J. Recommendations on the Use and Design of Risk Matrices. Saf. Sci. 2015, 76, 21–31. [Google Scholar] [CrossRef]
- Kabbabe Poleo, K.; Crowther, W.J.; Barnes, M. Estimating the Impact of Drone-Based Inspection on the Levelised Cost of Electricity for Offshore Wind Farms. Results Eng. 2021, 9, 100201. [Google Scholar] [CrossRef]
- Huang, H.-M. Autonomy Levels for Unmanned Systems (ALFUS) Framework. In Proceedings of the 2007 Workshop on Performance Metrics for Intelligent Systems, New York, NY, USA, 28–30 August 2007; pp. 48–53. [Google Scholar] [CrossRef]
- Hall, J.J.; Williams, R.L. Case Study: Inertial Measurement Unit Calibration Platform. J. Robot. Syst. 2000, 17, 623–632. [Google Scholar] [CrossRef]
- Tan, H.; Wilson, A.M.; Lowe, J. Measurement of Stride Parameters Using a Wearable GPS and Inertial Measurement Unit. J. Biomech. 2008, 41, 1398–1406. [Google Scholar] [CrossRef]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A New Multi-Position Calibration Method for MEMS Inertial Navigation Systems. Meas. Sci. Technol. 2007, 18, 1897. [Google Scholar] [CrossRef]
- Klochkov, V.; Nikitova, A. A Simplified Approach to Economic Efficiency Analysis of UAV Pipeline Surveillance. Transp. Eng. 2008, 27, 172–180. [Google Scholar]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Sivakumar, M.; Naga Malleswari, T.Y.J. A Literature Survey of Unmanned Aerial Vehicle Usage for Civil Applications. J. Aerosp. Technol. Manag. 2021, 13, e4021. [Google Scholar] [CrossRef]
- Lyon, D.H. A Military Perspective on Small Unmanned Aerial Vehicles. IEEE Instrum. Meas. Mag. 2004, 7, 27–31. [Google Scholar] [CrossRef]
- Davies, S. UAVs in the Firing Line. Eng. Technol. 2011, 6, 34–36. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial Remote Sensing in Agriculture: A Practical Approach to Area Coverage and Path Planning for Fleets of Mini Aerial Robots. J. F. Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V.; Vucetic, B. Autonomous Area Exploration and Mapping in Underground Mine Environments by Unmanned Aerial Vehicles. Robotica 2020, 38, 442–456. [Google Scholar] [CrossRef]
- Xing, L.; Fan, X.; Dong, Y.; Xiong, Z.; Xing, L.; Yang, Y.; Bai, H.; Zhou, C. Multi-UAV Cooperative System for Search and Rescue Based on YOLOv5. Int. J. Disaster Risk Reduct. 2022, 76, 102972. [Google Scholar] [CrossRef]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous Transportation and Deployment with Aerial Robots for Search and Rescue Missions. J. F. Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. A Method for Optimized Deployment of a Network of Surveillance Aerial Drones. IEEE Syst. J. 2019, 13, 4474–4477. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A. V An Algorithm of Reactive Collision Free 3-D Deployment of Networked Unmanned Aerial Vehicles for Surveillance and Monitoring. IEEE Trans. Ind. Inform. 2020, 16, 132–140. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A. V Wireless Sensor Network Based Navigation of Micro Flying Robots in the Industrial Internet of Things. IEEE Trans. Ind. Informatics 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Towards the Internet of Flying Robots: A Survey. Sensors 2018, 18, 4038. [Google Scholar] [CrossRef] [PubMed]
- Molnar, A. The Geo-Historical Legacies of Urban Security Governance and the Vancouver 2010 Olympics. Geogr. J. 2015, 181, 235–241. [Google Scholar] [CrossRef]
- Hardin, P.J.; Hardin, T.J. Small-Scale Remotely Piloted Vehicles in Environmental Research. Geogr. Compass 2010, 4, 1297–1311. [Google Scholar] [CrossRef]
- Eisenbeiss, H.; Sauerbier, M. Investigation of Uav Systems and Flight Modes for Photogrammetric Applications. Photogramm. Rec. 2011, 26, 400–421. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-de Dios, J.R.; Ferruz, J.; Ollero, A. A Cooperative Perception System for Multiple UAVs: Application to Automatic Detection of Forest Fires. J. F. Robot. 2006, 23, 165–184. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, S.; Jing, X.; Peng, Y.; Wu, H. Damage Detection Techniques for Wind Turbine Blades: A Review. Mech. Syst. Signal Process. 2020, 141, 106445. [Google Scholar] [CrossRef]
- Oliveira, G.; Magalhães, F.; Cunha, Á.; Caetano, E. Vibration-Based Damage Detection in a Wind Turbine Using 1 Year of Data. Struct. Control Health Monit. 2018, 25, e2238. [Google Scholar] [CrossRef]
- Oliveira, M.A.; Simas Filho, E.F.; Albuquerque, M.C.S.; Santos, Y.T.B.; da Silva, I.C.; Farias, C.T.T. Ultrasound-Based Identification of Damage in Wind Turbine Blades Using Novelty Detection. Ultrasonics 2020, 108, 106166. [Google Scholar] [CrossRef]
- Amenabar, I.; Mendikute, A.; López-Arraiza, A.; Lizaranzu, M.; Aurrekoetxea, J. Comparison and Analysis of Non-Destructive Testing Techniques Suitable for Delamination Inspection in Wind Turbine Blades. Compos. Part B Eng. 2011, 42, 1298–1305. [Google Scholar] [CrossRef]
- Ziegler, L.; Cosack, N.; Kolios, A.; Muskulus, M. Structural Monitoring for Lifetime Extension of Offshore Wind Monopiles: Verification of Strain-Based Load Extrapolation Algorithm. Mar. Struct. 2019, 66, 154–163. [Google Scholar] [CrossRef]
- Tziavos, N.I.; Hemida, H.; Dirar, S.; Papaelias, M.; Metje, N.; Baniotopoulos, C. Structural Health Monitoring of Grouted Connections for Offshore Wind Turbines by Means of Acoustic Emission: An Experimental Study. Renew. Energy 2020, 147, 130–140. [Google Scholar] [CrossRef]
- Reddy, A.; Indragandhi, V.; Ravi, L.; Subramaniyaswamy, V. Detection of Cracks and Damage in Wind Turbine Blades Using Artificial Intelligence-Based Image Analytics. Meas. J. Int. Meas. Confed. 2019, 147, 106823. [Google Scholar] [CrossRef]
- Sanati, H.; Wood, D.; Sun, Q. Condition Monitoring of Wind Turbine Blades Using Active and Passive Thermography. Appl. Sci. 2018, 8, 2004. [Google Scholar] [CrossRef]
- Koyama, K.; Hoshikawa, H.; Kojima, G. Eddy Current Nondestructive Testing for Carbon Fiber-Reinforced Composites. J. Press. Vessel Technol. Trans. ASME 2013, 135, 041501. [Google Scholar] [CrossRef]
- Rizk, P.; Younes, R.; Ilinca, A.; Khoder, J. Wind Turbine Blade Defect Detection Using Hyperspectral Imaging. Remote Sens. Appl. Soc. Environ. 2021, 22, 100522. [Google Scholar] [CrossRef]
- Zhang, D.; Watson, R.; Dobie, G.; MacLeod, C.; Pierce, G. Autonomous Ultrasonic Inspection Using Unmanned Aerial Vehicle. In Proceedings of the 2018 IEEE International Ultrasonics Symposium (IUS), Kobe, Japan, 22–25 October 2018. [Google Scholar] [CrossRef]
- Li, Z.; Pu, O.; Pan, Y.; Huang, B.; Zhao, Z.; Wu, H. A Study on Measuring Wind Turbine Wake Based on UAV Anemometry System. Sustain. Energy Technol. Assess. 2022, 53, 102537. [Google Scholar] [CrossRef]
- Du, H.; Wang, W.; Xu, C.; Xiao, R.; Sun, C. Real-Time Onboard 3D State Estimation of an Unmanned Aerial Vehicle in Multi-Environments Using Multi-Sensor Data Fusion. Sensors 2020, 20, 919. [Google Scholar] [CrossRef] [PubMed]
- Moolan-Feroze, O.; Karachalios, K.; Di Nikolaidis, N.; Calway, A. Simultaneous Drone Localisation and Wind Turbine Model Fitting during Autonomous Surface Inspection. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 2014–2021. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N. Quality Assessment of Unmanned Aerial Vehicle (UAV) Based Visual Inspection of Structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Shihavuddin, A.S.M.; Chen, X.; Fedorov, V.; Christensen, A.N.; Riis, N.A.B.; Branner, K.; Dahl, A.B.; Paulsen, R.R. Wind Turbine Surface Damage Detection by Deep Learning Aided Drone Inspection Analysis. Energies 2019, 12, 676. [Google Scholar] [CrossRef]
- Kanellakis, C.; Fresk, E.; Mansouri, S.S.; Kominiak, D.; Nikolakopoulos, G. Autonomous Visual Inspection of Large-Scale Infrastructures Using Aerial Robots. arXiv 2019, arXiv:1901.05510. [Google Scholar]
- Schonberger, J.L.; Frahm, J.M. Structure-from-Motion Revisited. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar] [CrossRef]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. Proc. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit. 2006, 1, 519–526. [Google Scholar] [CrossRef]
- Galleguillos, C.; Zorrilla, A.; Jimenez, A.; Diaz, L.; Montiano, L.; Barroso, M.; Viguria, A.; Lasagni, F. Thermographic Non-Destructive Inspection of Wind Turbine Blades Using Unmanned Aerial Systems. Plast. Rubber Compos. 2015, 44, 98–103. [Google Scholar] [CrossRef]
- Schäfer, B.E.; Picchi, D.; Engelhardt, T.; Abel, D. Multicopter Unmanned Aerial Vehicle for Automated Inspection of Wind Turbines. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 244–249. [Google Scholar] [CrossRef]
- Sanchez-Cuevas, P.J.; Gonzalez-Morgado, A.; Cortes, N.; Gayango, D.B.; Jimenez-Cano, A.E.; Ollero, A.; Heredia, G. Fully-Actuated Aerial Manipulator for Infrastructure Contact Inspection: Design, Modeling, Localization, and Control. Sensors 2020, 20, 4708. [Google Scholar] [CrossRef] [PubMed]
- Brower, M. Wind Resource Assessment: A Practical Guide to Developing a Wind Project; John Wiley & Sons: Hoboken, NJ, USA, 2012; ISBN 1118022327. [Google Scholar]
- Pratt, K.S.; Murphy, R.; Stover, S.; Griffin, C. CONOPS and Autonomy Recommendations for VTOL Small Unmanned Aerial System Based on Hurricane Katrina Operations. J. F. Robot. 2009, 26, 636–650. [Google Scholar] [CrossRef]
- CAA United Kingdom Unmanned Aircraft Systems Consolidated Version of Regulation (EU) 2019/947 as Retained (and Amended in UK Domestic Law) under the European Union (Withdrawal) Act 2018. 2021. Available online: https://publicapps.caa.co.uk/modalapplication.aspx?appid=11&mode=detail&id=9654 (accessed on 25 January 2024).
- Alerion WEGOOI Wind Energy Onshore and Offshore Inspector. Available online: https://aleriontec.com/en/project/wegggoi/ (accessed on 21 December 2023).
- Alerion WEGOOI Wind Energy Generator Onshore and Offshore Inspector. Available online: https://cordis.europa.eu/article/id/430161-the-winds-of-change-for-wind-turbine-inspection (accessed on 21 July 2023).
- CONNECT TECH. Wind Turbine Inspection Drone CASE STUDY Designing an AI Driven Inspection Drone for Wind Farms. Available online: https://connecttech.com/ (accessed on 25 January 2023).
- Pounds, P.E.I.; Dollar, A.M. Stability of Helicopters in Compliant Contact under PD-PID Control. IEEE Trans. Robot. 2014, 30, 1472–1486. [Google Scholar] [CrossRef]
- Marconi, L.; Naldi, R.; Gentili, L. Modelling and Control of a Flying Robot Interacting with the Environment. Automatica 2011, 47, 2571–2583. [Google Scholar] [CrossRef]
- Lippiello, V.; Ruggiero, F. Cartesian Impedance Control of a UAV with a Robotic Arm; IFAC: Munich, Germany, 2012; Volume 10, ISBN 9783902823045. [Google Scholar]
- Joukhadar, A.; Alchehabi, M.; Jejeh, A. Advanced UAVs Nonlinear Control Systems and Applications; Reyhanoglu, M., De Cubber, G., Eds.; IntechOpen: Rijeka, Croatia, 2019; p. 5. ISBN 978-1-78984-567-9. [Google Scholar]
- Muñoz Mendoza, L.F.; García-Torales, G.; Acosta Lúa, C.; Di Gennaro, S.; Guillen Bonilla, J.T. Trajectories Generation for Unmanned Aerial Vehicles Based on Obstacle Avoidance Located by a Visual Sensing System. Mathematics 2023, 11, 1413. [Google Scholar] [CrossRef]
- Hua, M.D.; Hamel, T.; Morin, P.; Samson, C. Introduction to Feedback Control of Underactuated VTOL Vehicles. IEEE Control Syst. 2013, 33, 61–75. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance; Springer: Berlin/Heidelberg, Germany, 2010; Volume 57, ISBN 1084600993831. [Google Scholar]
- Dadkhah, N.; Mettler, B. Survey of Motion Planning Literature in the Presence of Uncertainty: Considerations for UAV Guidance. J. Intell. Robot. Syst. Theory Appl. 2012, 65, 233–246. [Google Scholar] [CrossRef]
- Kang, D.; Cha, Y.J. Autonomous UAVs for Structural Health Monitoring Using Deep Learning and an Ultrasonic Beacon System with Geo-Tagging. Comput. Civ. Infrastruct. Eng. 2018, 33, 885–902. [Google Scholar] [CrossRef]
- Sanchez, P.J.B.; Ramirez, I.S.; Marquez, F.P.G. Wind Turbines Acoustic Inspections Performed with UAV and Sound Frequency Domain Analysis. In Proceedings of the 2021 7th International Conference on Control, Instrumentation and Automation (ICCIA), Tabriz, Iran, 23–24 February 2021; pp. 8–12. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z.J. Automatic Detection of Wind Turbine Blade Surface Cracks Based on UAV-Taken Images. IEEE Trans. Ind. Electron. 2017, 64, 7293–7303. [Google Scholar] [CrossRef]
- Gao, L.; Hu, H. Wind Turbine Icing Characteristics and Icing-Induced Power Losses to Utility-Scale Wind Turbines. Proc. Natl. Acad. Sci. USA 2021, 118, e2111461118. [Google Scholar] [CrossRef] [PubMed]
- Kulsinskas, A.; Durdevic, P.; Ortiz-Arroyo, D. Internal Wind Turbine Blade Inspections Using Uavs: Analysis and Design Issues. Energies 2021, 14, 294. [Google Scholar] [CrossRef]
- DSLRPros Wind Turbine Inspection Drones. Available online: https://www.dslrpros.com/wind-turbine.html (accessed on 21 July 2023).
- 3DX Blade Platform. Available online: https://www.sulzerschmid.ch/offering/ (accessed on 21 July 2023).
- BladeEdge. BladeEdge SM Case Study Taking Control: Enabling a Wind Energy Owner/Operator For In-House Inspections. 2020. Available online: https://bladeedge.net/resources/html (accessed on 25 January 2023).
- ABJ Drone Wind Turbine and Blade Inspection for Offshore and Onshore Wind Farms. Available online: https://abjdrones.com/drone-wind-turbine-inspection/ (accessed on 21 July 2023).
- SkySpecs SkySpecs Inspections. Available online: https://skyspecs.com/product/inspections/ (accessed on 21 July 2023).
- AerialTronics Drone Solutions for Wind Turbine Inspection. Available online: https://www.aerialtronics.com/en/applications/drones-for-wind-turbine-inspection#intro (accessed on 25 July 2023).
- Clobotic Autonomous Blade Inspections. Available online: https://clobotics.com/wind/ (accessed on 25 July 2023).
- Aero-Enterprise Inspection Service at Offshore Wind Turbines. Available online: https://aero-enterprise.com/services/offshore-wind-turbines/ (accessed on 25 July 2023).
- Cracknell, A.P. UAVs: Regulations and Law Enforcement. Int. J. Remote Sens. 2017, 38, 3054–3067. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluaǧaç, S. Drones for Smart Cities: Issues in Cybersecurity, Privacy, and Public Safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV Communications via Trajectory Optimization. In Proceedings of the GLOBECOM 2017-2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV Assistance Paradigm: State-of-the-Art in Applications and Challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial Manipulation: A Literature Review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Chermprayong, P.; Zhang, K.; Xiao, F.; Kovac, M. An Integrated Delta Manipulator for Aerial Repair: A New Aerial Robotic System. IEEE Robot. Autom. Mag. 2019, 26, 54–66. [Google Scholar] [CrossRef]
- Seo, H.; Kim, S.; Kim, H.J. Aerial Grasping of Cylindrical Object Using Visual Servoing Based on Stochastic Model Predictive Control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6362–6368. [Google Scholar] [CrossRef]
- Korpela, C.; Orsag, M.; Oh, P. Towards Valve Turning Using a Dual-Arm Aerial Manipulator. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3411–3416. [Google Scholar] [CrossRef]
- Shimahara, S.; Suphachart, L.; Ladig, R.; Shimonomura, K. Aerial Torsional Manipulation Employing Multi-Rotor Flying Robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 1595–1600. [Google Scholar] [CrossRef]
- Zhang, K.; Chermprayong, P.; Xiao, F.; Tzoumanikas, D.; Dams, B.; Kay, S.; Kocer, B.B.; Burns, A.; Orr, L.; Choi, C.; et al. Aerial Additive Manufacturing with Multiple Autonomous Robots. Nature 2022, 609, 709–717. [Google Scholar] [CrossRef]
- Chen, H.; Quan, F.; Fang, L.; Zhang, S. Aerial Grasping with a Lightweight Manipulator Based on Multi-Objective Optimization and Visual Compensation. Sensors 2019, 19, 4253. [Google Scholar] [CrossRef]
- Suarez, A.; Caballero, A.; Garofano, A.; Sanchez-Cuevas, P.J.; Heredia, G.; Ollero, A. Aerial Manipulator with Rolling Base for Inspection of Pipe Arrays. IEEE Access 2020, 8, 162516–162532. [Google Scholar] [CrossRef]
- Suarez, A.; Perez, M.; Heredia, G.; Ollero, A. Cartesian Aerial Manipulator with Compliant Arm. Appl. Sci. 2021, 11, 1001. [Google Scholar] [CrossRef]
- Suarez, A.; Real, F.; Vega, V.M.; Heredia, G.; Rodriguez-Castano, A.; Ollero, A. Compliant Bimanual Aerial Manipulation: Standard and Long Reach Configurations. IEEE Access 2020, 8, 88844–88865. [Google Scholar] [CrossRef]
- Suarez, A.; Sanchez-cuevas, P.J.; Heredia, G.; Ollero, A. Aerial Physical Interaction in Grabbing Conditions with Lightweight and Compliant Dual Arms. Appl. Sci. 2020, 10, 8927. [Google Scholar] [CrossRef]
- Fumagalli, M.; Naldi, R.; Macchelli, A.; Forte, F.; Keemink, A.Q.L.; Stramigioli, S.; Carloni, R.; Marconi, L. Developing an Aerial Manipulator Prototype: Physical Interaction with the Environment. IEEE Robot. Autom. Mag. 2014, 21, 41–50. [Google Scholar] [CrossRef]
- Ikeda, T.; Yasui, S.; Fujihara, M.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Wall Contact by Octo-Rotor UAV with One DoF Manipulator for Bridge Inspection. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5122–5127. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned Aerial Drones for Inspection of Offshore Wind Turbines: A Mission-Critical Failure Analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- European Commission, Directorate-General for Enterprise and Industry; Wright, D.; Finn, R.; De Hert, P. Study on Privacy, Data Protection and Ethical Risks in Civil Remotely Piloted Aircraft—Final Report; Publications Office: Brussels, Belgium, 2014. [Google Scholar] [CrossRef]
- Rao, B.; Gopi, A.G.; Maione, R. The Societal Impact of Commercial Drones. Technol. Soc. 2016, 45, 83–90. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomatics 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.; Zhang, Y.; Zhang, W.; Lu, H. Dynamic Route Planning for a USV-UAV Multi-Robot System in the Rendezvous Task with Obstacles. J. Intell. Robot. Syst. Theory Appl. 2023, 107, 1–14. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, D.; Wu, C.; Tang, H.; Tian, C. A Multi-Finger Robot System for Adaptive Landing Gear and Aerial Manipulation. Rob. Auton. Syst. 2021, 146, 103878. [Google Scholar] [CrossRef]
- Paul, H.; Miyazaki, R.; Kominami, T.; Ladig, R.; Shimonomura, K. A Versatile Aerial Manipulator Design and Realization of Uav Take-off from a Rocking Unstable Surface. Appl. Sci. 2021, 11, 9157. [Google Scholar] [CrossRef]
- Luo, C.; Zhao, W.; Du, Z.; Yu, L. A Neural Network Based Landing Method for an Unmanned Aerial Vehicle with Soft Landing Gears. Appl. Sci. 2019, 9, 2976. [Google Scholar] [CrossRef]
- Zhang, K.; Chermprayong, P.; Tzoumanikas, D.; Li, W.; Grimm, M.; Smentoch, M.; Leutenegger, S.; Kovac, M. Bioinspired Design of a Landing System with Soft Shock Absorbers for Autonomous Aerial Robots. J. F. Robot. 2019, 36, 230–251. [Google Scholar] [CrossRef]
- Ollero, A.; Siciliano, B. Aerial Robotic Manipulation; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Ikeda, T.; Yasui, S.; Minamiyama, S.; Ohara, K.; Ashizawa, S.; Ichikawa, A.; Okino, A.; Oomichi, T.; Fukuda, T. Stable Impact and Contact Force Control by UAV for Inspection of Floor Slab of Bridge. Adv. Robot. 2018, 32, 1061–1076. [Google Scholar] [CrossRef]
- Alakhras, A.; Sattar, I.H.; Alvi, M.; Qanbar, M.W.; Jaradat, M.A.; Alkaddour, M. The Design of a Lightweight Cable Aerial Manipulator with a CoG Compensation Mechanism for Construction Inspection Purposes. Appl. Sci. 2022, 12, 1173. [Google Scholar] [CrossRef]
- Trujillo, M.Á.; Martínez-De Dios, J.R.; Martín, C.; Viguria, A.; Ollero, A. Novel Aerial Manipulator for Accurate and Robust Industrial NDT Contact Inspection: A New Tool for the Oil and Gas Inspection Industry. Sensors 2019, 19, 1305. [Google Scholar] [CrossRef]
- AEROBI AErial RObotic System for In-Depth Bridge Inspection by Contact. Available online: https://www.aerobi.eu/ (accessed on 26 July 2023).
- Resist RESilient Transport InfraSTructure to Extreme Events. Available online: https://www.resistproject.eu/ (accessed on 25 January 2024).
- Piloting Piloting Proposes. Available online: https://piloting-project.eu/ (accessed on 26 July 2023).
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer: Berlin/Heidelberg, Germany, 2018; Volume 120, ISBN 9783319761374. [Google Scholar]
- Zhang, S.; Cao, D.; Min, H.; Li, S.; Zhang, X. Design and Wrench-Feasible Workspace Analysis of a Cable-Driven Hybrid Joint. Int. J. Adv. Robot. Syst. 2020, 17, 1729881419899758. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Peng, F.; Li, H.; Wang, L. Workspace Analysis and Optimal Design of a Translational Cable-Driven Parallel Robot with Passive Springs. J. Mech. Robot. 2020, 12, 051005. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L. Optimization and Implementation of a High-Speed 3-DOFs Translational Cable-Driven Parallel Robot. Mech. Mach. Theory 2020, 145, 103693. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L.; Shih, A.J. Optimal Design of a High-Speed Pick-and-Place Cable-Driven Parallel Robot. Mech. Mach. Sci. 2018, 53, 340–352. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; You, Z.; Tang, X.; Zi, B.; Yang, G.; Gosselin, C.; Caro, S. State-of-the-Art on Theories and Applications of Cable-Driven Parallel Robots. Front. Mech. Eng. 2022, 17, 37. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, G.; Shao, Z.; Gosselin, C. Kinematic Calibration of Cable-Driven Parallel Robots Considering the Pulley Kinematics. Mech. Mach. Theory 2022, 169, 104648. [Google Scholar] [CrossRef]
- Zhu, W.; Liu, J.; Shi, K.; Qi, F.; Shen, H.; Xu, Z.; Ma, Z. Optimization Design and Dynamic Stability Analysis of 3-DOF Cable-Driven Parallel Robot with an Elastic Telescopic Rod. J. Mech. Sci. Technol. 2022, 36, 4735–4746. [Google Scholar] [CrossRef]
- Nishio, T.; Zhao, M.; Okada, K.; Inaba, M. Design, Control, and Motion-Planning for a Root-Perching Rotor-Distributed Manipulator. IEEE Trans. Robot. 2023, 40, 660–676. [Google Scholar] [CrossRef]
- Thomas, J.; Pope, M.; Loianno, G.; Hawkes, E.W.; Estrada, M.A.; Jiang, H.; Cutkosky, M.R.; Kumar, V. Aggressive Flight with Quadrotors for Perching on Inclined Surfaces. J. Mech. Robot. 2016, 8, 051007. [Google Scholar] [CrossRef]
- Nguyen, H.N.; Siddall, R.; Stephens, B.; Navarro-Rubio, A.; Kovac, M. A Passively Adaptive Microspine Grapple for Robust, Controllable Perching. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 80–87. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, S.; Cutkosky, M.R. Stochastic Models of Compliant Spine Arrays for Rough Surface Grasping. Int. J. Rob. Res. 2018, 37, 669–687. [Google Scholar] [CrossRef]
- Daler, L.; Klaptocz, A.; Briod, A.; Sitti, M.; Floreano, D. A Perching Mechanism for Flying Robots Using a Fibre-Based Adhesive. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4433–4438. [Google Scholar] [CrossRef]
- Liu, S.; Dong, W.; Ma, Z.; Sheng, X. Adaptive Aerial Grasping and Perching with Dual Elasticity Combined Suction Cup. IEEE Robot. Autom. Lett. 2020, 5, 4766–4773. [Google Scholar] [CrossRef]
- Wopereis, H.W.; Van Der Molen, T.D.; Post, T.H.; Stramigioli, S.; Fumagalli, M. Mechanism for Perching on Smooth Surfaces Using Aerial Impacts. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 154–159. [Google Scholar] [CrossRef]
- Zhang, H.; Lerner, E.; Cheng, B.; Zhao, J. Compliant Bistable Grippers Enable Passive Perching for Micro Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2021, 26, 2316–2326. [Google Scholar] [CrossRef]
- Lin, T.J.; Long, S.; Stol, K.A. Automated Perching of a Multirotor UAV atop Round Timber Posts. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 486–491. [Google Scholar] [CrossRef]
- Roderick, W.R.T.; Cutkosky, M.R.; Lentink, D. Bird-Inspired Dynamic Grasping and Perching in Arboreal Environments. Sci. Robot. 2021, 6, eabj7562. [Google Scholar] [CrossRef] [PubMed]
- Yanagimura, K.; Ohno, K.; Okada, Y.; Takeuchi, E.; Tadokoro, S. Hovering of MAV by Using Magnetic Adhesion and Winch Mechanisms. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6250–6257. [Google Scholar] [CrossRef]
- Garcia-Rubiales, F.J.; Ramon-Soria, P.; Arrue, B.C.; Ollero, A. Magnetic Detaching System for Modular UAVs with Perching Capabilities in Industrial Environments. In Proceedings of the 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, UK, 25–27 November 2019; pp. 172–176. [Google Scholar] [CrossRef]
- Jimenez-Cano, A.E.; Sanchez-Cuevas, P.J.; Grau, P.; Ollero, A.; Heredia, G. Contact-Based Bridge Inspection Multirotors: Design, Modeling, and Control Considering the Ceiling Effect. IEEE Robot. Autom. Lett. 2019, 4, 3561–3568. [Google Scholar] [CrossRef]
- Gabrich, B.; Saldana, D.; Kumar, V.; Yim, M. A Flying Gripper Based on Cuboid Modular Robots. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7024–7030. [Google Scholar] [CrossRef]
- Oung, R.; D’Andrea, R. The Distributed Flight Array. Mechatronics 2011, 21, 908–917. [Google Scholar] [CrossRef]
- Zhao, M.; Kawasaki, K.; Anzai, T.; Chen, X.; Noda, S.; Shi, F.; Okada, K.; Inaba, M. Transformable Multirotor with Two-Dimensional Multilinks: Modeling, Control, and Whole-Body Aerial Manipulation. Int. J. Rob. Res. 2018, 37, 1085–1112. [Google Scholar] [CrossRef]
- Zhao, M.; Nishio, T. Generalized Design, Modeling and Control Methodology for a Snake-like Aerial Robot. Sensors 2023, 23, 1882. [Google Scholar] [CrossRef] [PubMed]







| Techniques | Nacelle | Tower | Blade | Bearings | Shaft | Gearbox | Generator |
|---|---|---|---|---|---|---|---|
| Vibration analysis | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Torsional vibration | ✓ | ✓ | |||||
| Acoustics emission | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Oil analysis | ✓ | ✓ | ✓ | ||||
| Strain measurement | ✓ | ✓ | |||||
| Optical fiber monitoring | ✓ | ||||||
| Electrical effects | ✓ | ✓ | |||||
| Temperature | ✓ | ✓ | ✓ | ✓ | |||
| Ultrasonic testing techniques | ✓ | ✓ | |||||
| Thermography | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Visual inspection | ✓ | ✓ | ✓ | ||||
| Radiographic inspection | ✓ | ✓ | |||||
| Generator power output | ✓ |
| Severity | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| Very Minor/No Injuries | Moderate Injuries | Lost Tim Injuries | Serious Injuries /Permanent Disabilities | Fatalities | |||
| Likelihood | 5 | Almost Certain | Low Medium (5) | Medium (10) | High (15) | Very High (20) | Very High (25) |
| 4 | Very Likely | Low Medium (4) | Medium (8) | Medium (12) | High (16) | Very High (20) | |
| 3 | Likely | Low (3) | Low Medium (6) | Medium (9) | Medium (12) | High (15) | |
| 2 | Unlikely | Low (2) | Low Medium (4) | Low Medium (6) | Medium (8) | Medium (10) | |
| 1 | Very Unlikely | Low (1) | Low (2) | Low (3) | Low Medium (4) | Low Medium (5) | |
| Method | Hazards Identified and Potential Harm It Could Cause | Likelihood | Severity | Risk Rating |
|---|---|---|---|---|
| Manual | Fell from a height Drowning Get an electric shock | 3 Likely | 5 Fatalities | 15 High |
| Permanent Sensors | Short circuit caused by line aging | 1 Very unlikely | 1 Slight injury, no treatment required; no time lost | 1 Low |
| Climbing Robot | The crew on the support vessel fell overboard during the launch | 3 Likely | 3 Lost time injury | 9 Medium |
| ROVs | The crew on the support vessel fell overboard during the launch | 3 Likely | 3 Lost time injury | 9 Medium |
| UAVs | UAV crashes out of control | 3 Likely | 1 Slight injury, no treatment required; no time lost | 3 Low |
| Methods | Sensors | Advantages | Limitations |
|---|---|---|---|
| Manual inspection | Visual | Direct human intervention High mission diversity. | Time-consuming, costly H&S risk Limited access to certain areas, subjective assessment. |
| Permanent sensor | Vibration sensor, temperature sensor, speed sensor, strain sensor | Continuous monitoring, real-time data collection, less human intervention required, early detection of anomalies. | Limited to specific sensors and sites, may not capture comprehensive data, inability to perform physical repairs, require additional inspection methods for detailed assessment. |
| Climbing robot | Visual | Can access vertical surfaces, perform close-range inspections, suitable for complex structures, collect visual and sensor data. | Limited to vertical surfaces, may require complex deployment mechanisms, slower inspection process, higher cost compared to UAVs. |
| ROV | Visual, sonar | Can inspect underwater structures, perform detailed inspections, collect visual and sensor data, suitable for subsea components. | Limited to underwater inspections, require complex deployment and operation, higher cost, restricted to specific areas, challenging in harsh weather conditions. |
| UAV | Visual, LiDAR, GPS | Versatile and flexible, can perform visual and thermal inspections, capture high-resolution imagery, cover large areas quickly, collect comprehensive data, cost-effective. | Limited flight endurance, weather-dependent, may require skilled operators, challenges in confined spaces or high winds, manually restricted to line-of-sight operations. |
| Components | Result | Technique | Sensors & Hardware | Evaluation | Source |
|---|---|---|---|---|---|
| Papers | |||||
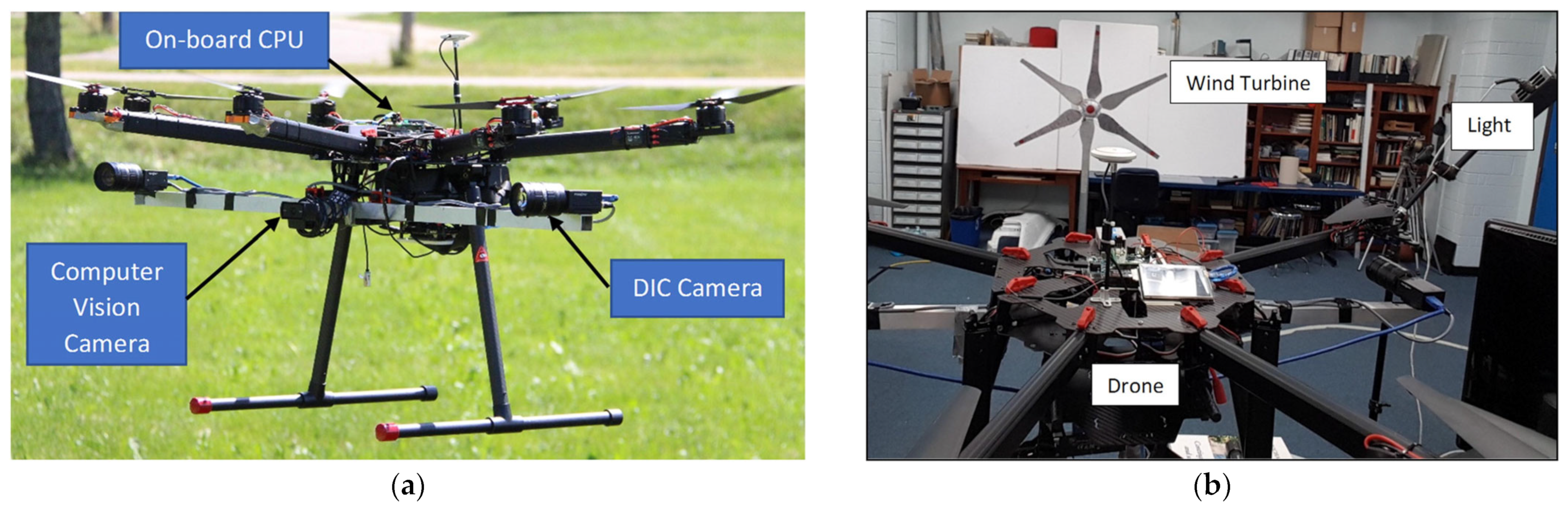
| Blade | Defect Identification | Obtaining the vibration characteristics using a digital image correlation (DIC) system installed on a UAV | Cameras | Pros: Non-contact vibration monitoring Cons: Crating pattern on utility scale wind turbine can be a challenge | Khadka et al. [93] |
| Blade | 3D Modeling Defect Identification | High-resolution blade images and a 3D model of the wind-turbine structure | LiDAR | Pros: No additional pre-flight setup required Cons: requires some manual operation | Car et al. [94] |
| Blade | Navigation | Autonomous machine vision navigation | Camera | Pros: ability to capture the main features with low computational demand Cons: exclusive focus on the initial stage of the UAVs’ operation | Stokkeland et al. [85] |
| Blade | Defect Identification | Detecting wind turbine blade surface cracks using images from UAVs | Camera | Pros: The inspection process could be completed rapidly Cons: Not Available | Wang et al. [197] |
| Nacelle | Defect Identification | Ultrasonic Inspection by a ultrasonic sensor | ultrasound probe Camera LiDAR | Pros: Contact method Cons: Only laboratory tests were carried out. | Zhang et al. [178] |
| Projects | |||||
| Tower Blade | Navigation 3D Modeling Defect Identification | Geometry-based path planner for coverage of complex structures. Flexible localization using UWB fused inertial estimation scheme visual 3D model building | Camera LiDAR UWB node IMU | Pros: reach high level of autonomy on a large scale Cons: 1. sensitive to the existing weather conditions 2. Wi-Fi is not a reliable communication 3. UWB anchors need to be kept permanently | Kanellakis et al. [172] |
| Blade | Defect Identification | Infrared Thermography | Infrared Camera | Pros: Being able to detect defects below the surface Cons: Low degree of automation | Galleguillos et al. [175] |
| Blade | Navigation Defect Identification | Computer Vision | Camera | Pros: Innovative the interior wind turbine blade inspections Cons: sensitive to the existing weather conditions | Kulsinskas et al. [199] |
| Blade Tower | Defect Identification | Close Visual thermal inspections | Camera LiDAR | Not Available | TERRADRONE [200] |
| Blade Tower | Defect Identification | Computer Vision, Autonomous navigation | Camera | Not Available | 3DX [201] |
| Blade Tower | Defect Identification | Computer Vision | Camera | Not Available | Blade Edge [202] |
| Blade Tower | 3D Modeling Defect Identification | Computer Vision Autonomous navigation | Camera LiDAR | Pros: The UAV can do the inspection automatically and save time. Cons: The project is not complete, and the hardware needs to adopt to maritime environment. | Alerion [184,185,186] |
| Blade | Defect Identification | Infrared Thermography | Infrared Camera | Pros: A unique and proven technology with high-resolution up to 3 mm Cons: Manually operated | ABJ [203] |
| Blade | 3D Modeling Defect Identification | Computer Vision Autonomous navigation | Camera LiDAR | Pros: The global leader in turbine blade inspections with more than 200,000 successful inspections Cons: Not Available | SkySpecs [204] |
| Blade | Defect Identification | Computer Vision Infrared Thermography | Infrared Camera | Pros: Ability to work in harsh environments Cons: Not Available | Aerial Tronics [205] |
| Blade | Defect Identification | Computer Vision | Camera | Not Available | Clobotic [206] |
| Blade | Defect Identification | Computer Vision | Camera LiDAR | Not Available | Aero-Enterprise [207] |
| UAS | Operator/Pilot | Operator/Pilot | ||||
|---|---|---|---|---|---|---|
| Class | Weight | Subcategory | Operational Restrictions | Distance from People | Operator Registration Required | Remote Pilot Competence |
| Privately built | <250 g | A1 |
| You can fly over uninvolved people (not over crowds) | No | Read owner manual |
| C0 | ||||||
| C1 | <900 g | Yes |
| |||
| C2 | <4 kg | A2 | You can fly at a safe distance from uninvolved people |
| ||
| C3 | <25 kg | A3 | Fly in an area where it is reasonably expected that no uninvolved people will be endangered. Keep a safe distance from urban areas |
| ||
| C4 (model aircraft) | ||||||
| Privately built | ||||||
| Cable-Driven Parallel | Delta Parallel | Series | |
|---|---|---|---|
| Center of gravity | Center of horizontal geometry | Center of horizontal geometry | Not in the center of horizontal geometry |
| Workspace | Large | Large | Small |
| Materials | Plastic or carbon fiber | Plastic or carbon fiber | Metal |
| Weight | Low | Low | High |
| Moment of inertia | Low | Low | High |
| Control accuracy | High (no error accumulation) | High (no error accumulation) | Low (error accumulation) |
| Connection form | Rigid connection and flexible connection | Rigid connection | Rigid connection |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Pakrashi, V.; Murphy, J.; Hao, G. Inspection of Floating Offshore Wind Turbines Using Multi-Rotor Unmanned Aerial Vehicles: Literature Review and Trends. Sensors 2024, 24, 911. https://doi.org/10.3390/s24030911
Zhang K, Pakrashi V, Murphy J, Hao G. Inspection of Floating Offshore Wind Turbines Using Multi-Rotor Unmanned Aerial Vehicles: Literature Review and Trends. Sensors. 2024; 24(3):911. https://doi.org/10.3390/s24030911
Chicago/Turabian StyleZhang, Kong, Vikram Pakrashi, Jimmy Murphy, and Guangbo Hao. 2024. "Inspection of Floating Offshore Wind Turbines Using Multi-Rotor Unmanned Aerial Vehicles: Literature Review and Trends" Sensors 24, no. 3: 911. https://doi.org/10.3390/s24030911
APA StyleZhang, K., Pakrashi, V., Murphy, J., & Hao, G. (2024). Inspection of Floating Offshore Wind Turbines Using Multi-Rotor Unmanned Aerial Vehicles: Literature Review and Trends. Sensors, 24(3), 911. https://doi.org/10.3390/s24030911