
A Novel Zero-Velocity Interval Detection Algorithm for a Pedestrian Navigation System with Foot-Mounted Inertial Sensors


Abstract
1. Introduction
2. Analysis
2.1. Analysis of Gait Characteristics
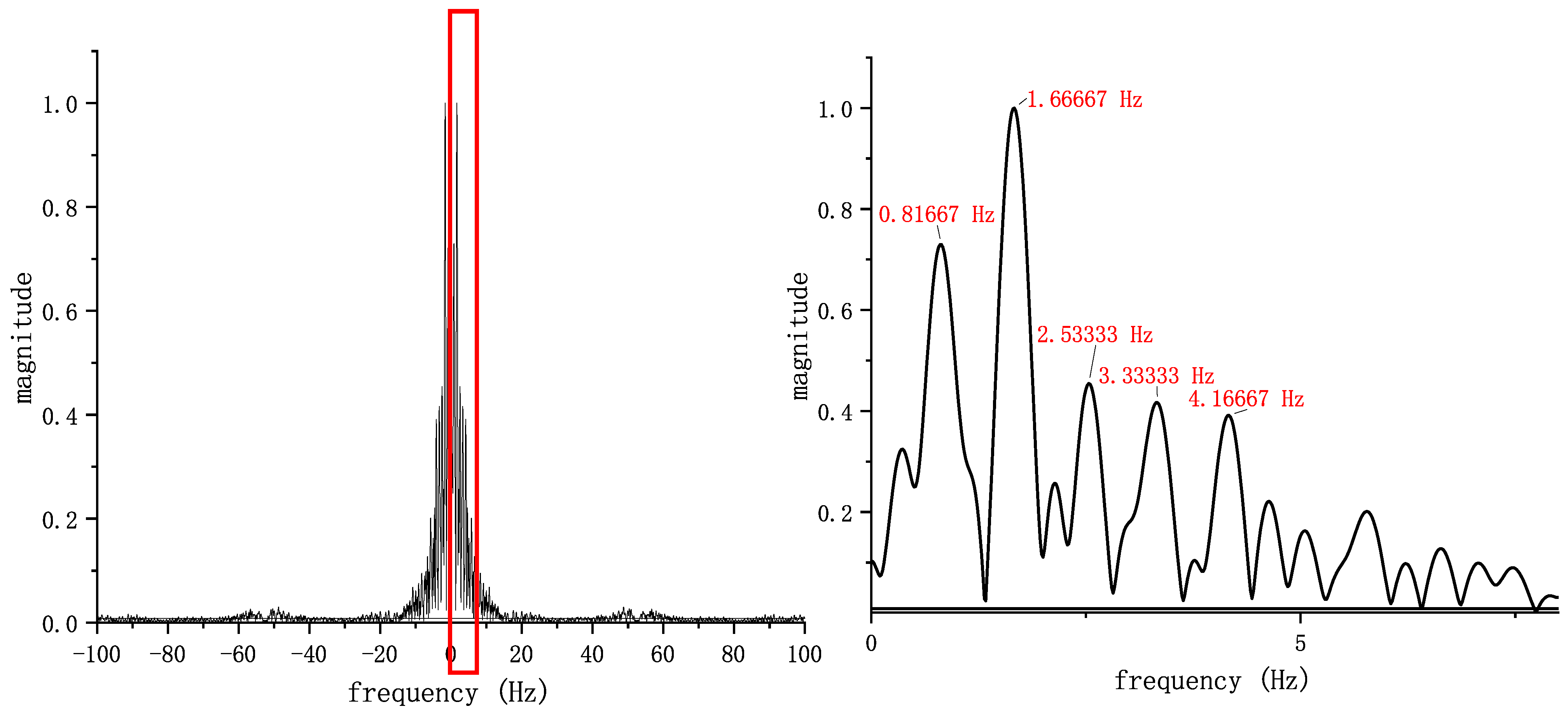
2.2. Analysis of the Fourier Spectrum
3. Methods
3.1. The Adaptive Window Gait Frequency-Based Zero-Velocity Detector
3.1.1. Adaptive Window Gait Frequency Extraction Algorithm
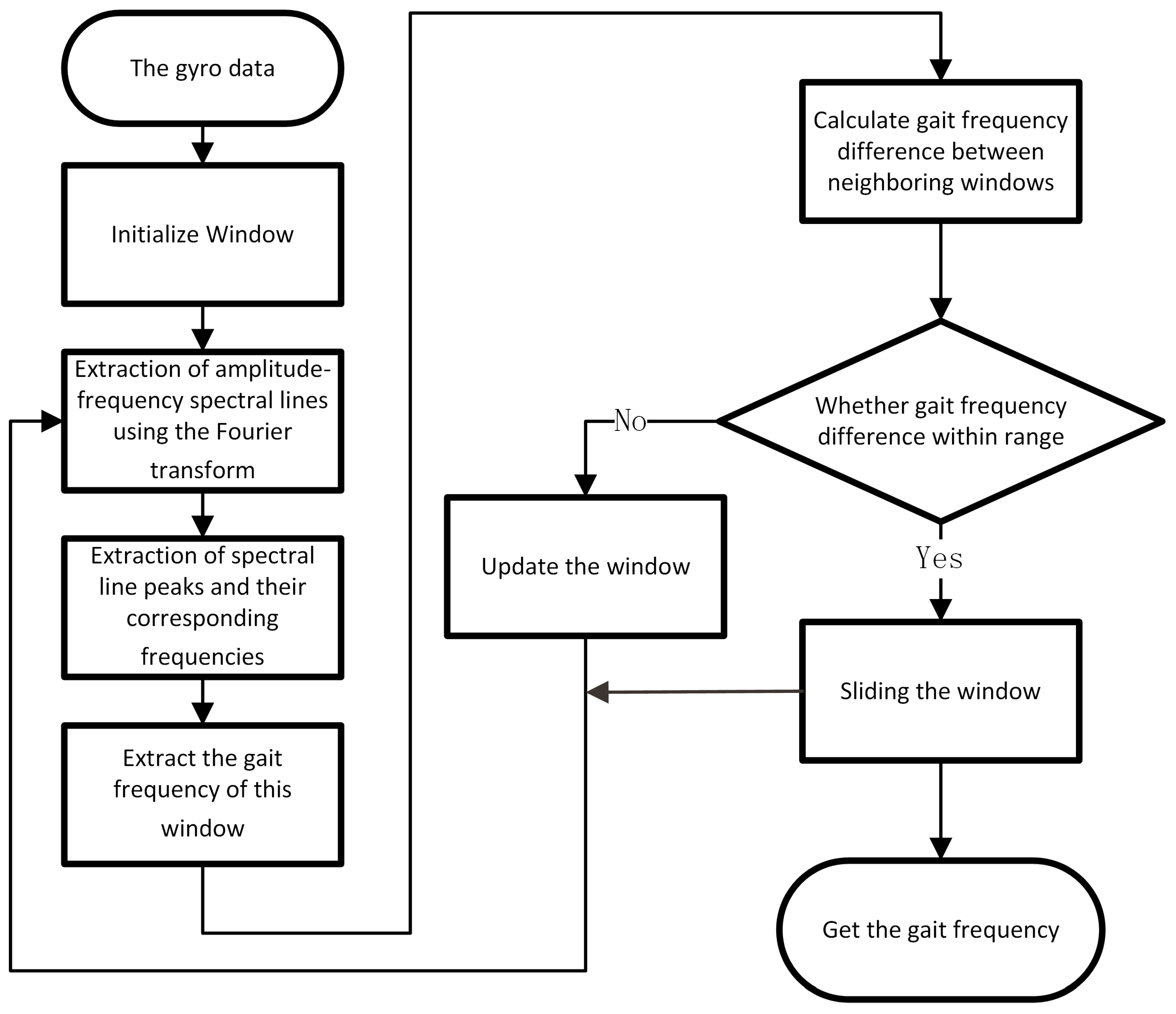
- We initialized the window for the time domain signal with an initial window size set to 600. We then extended the data at the boundaries of the window with zeros to enhance the frequency resolution. We then used DFT to extract the spectral lines.
- For the spectral lines of the i-th window , the adaptive multiscale-based peak detection (AMPD) algorithm [25] is applied to identify the peak frequencies and their corresponding amplitudes . Following this, the maximum peak of the spectrum is extracted, and the frequency associated with this peak is labeled as . Its index in is noted as .
- We then find the maximum value of with an index less than and its corresponding frequency . This frequency is considered as the pedestrian gait frequency .
- We move to the next window and repeat steps 2 and 3 to obtain the gait frequency of this window; we then calculate the frequency difference of the neighboring times: . When the frequency difference satisfies , the sliding window width is reduced, and when the frequency difference satisfies , the sliding window width increases. Based on the pedestrian’s average walking frequency of 0.8 Hz and maximum running frequency of 5 Hz, the frequency difference threshold can be set to 0.3 Hz. Then we calculate the again.
- Repeat steps 2–4 to acquire the pedestrian gait frequency.
3.1.2. The Adaptive-Threshold Zero-Velocity Detection Method
3.2. Pedestrian Navigation Algorithm
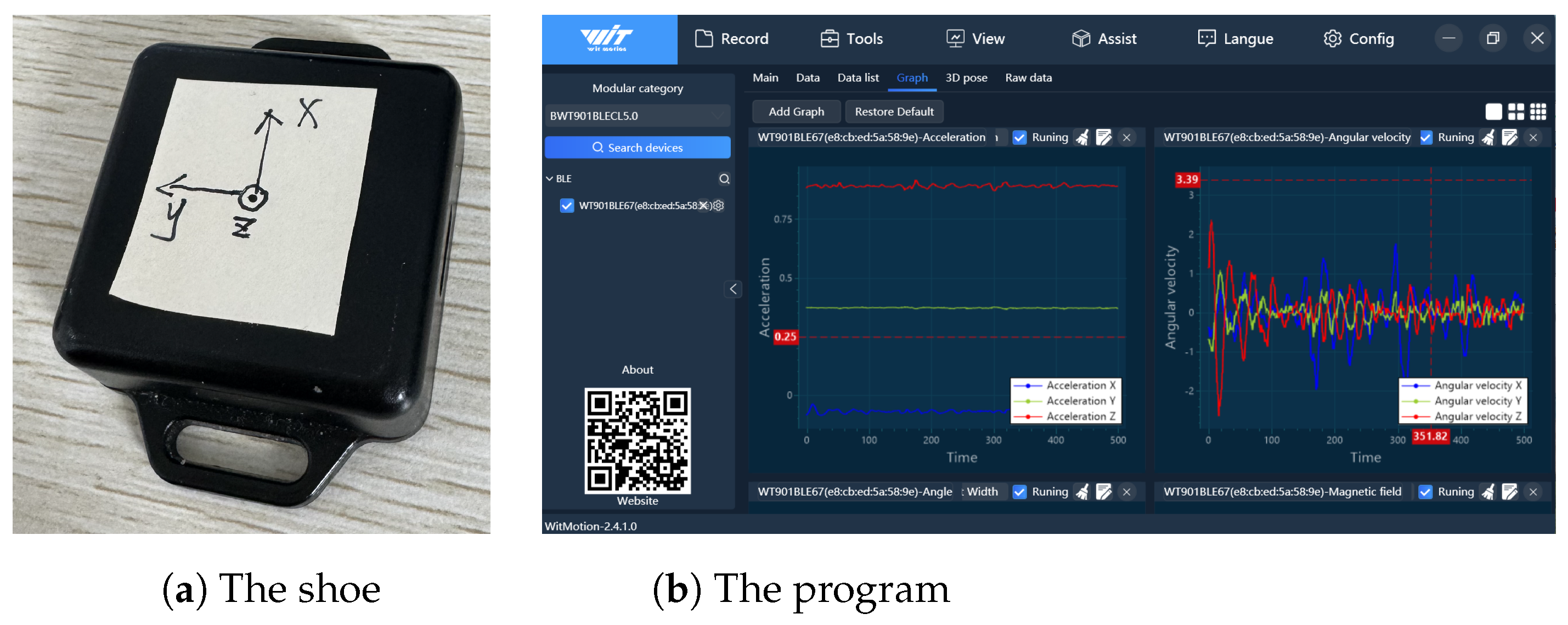
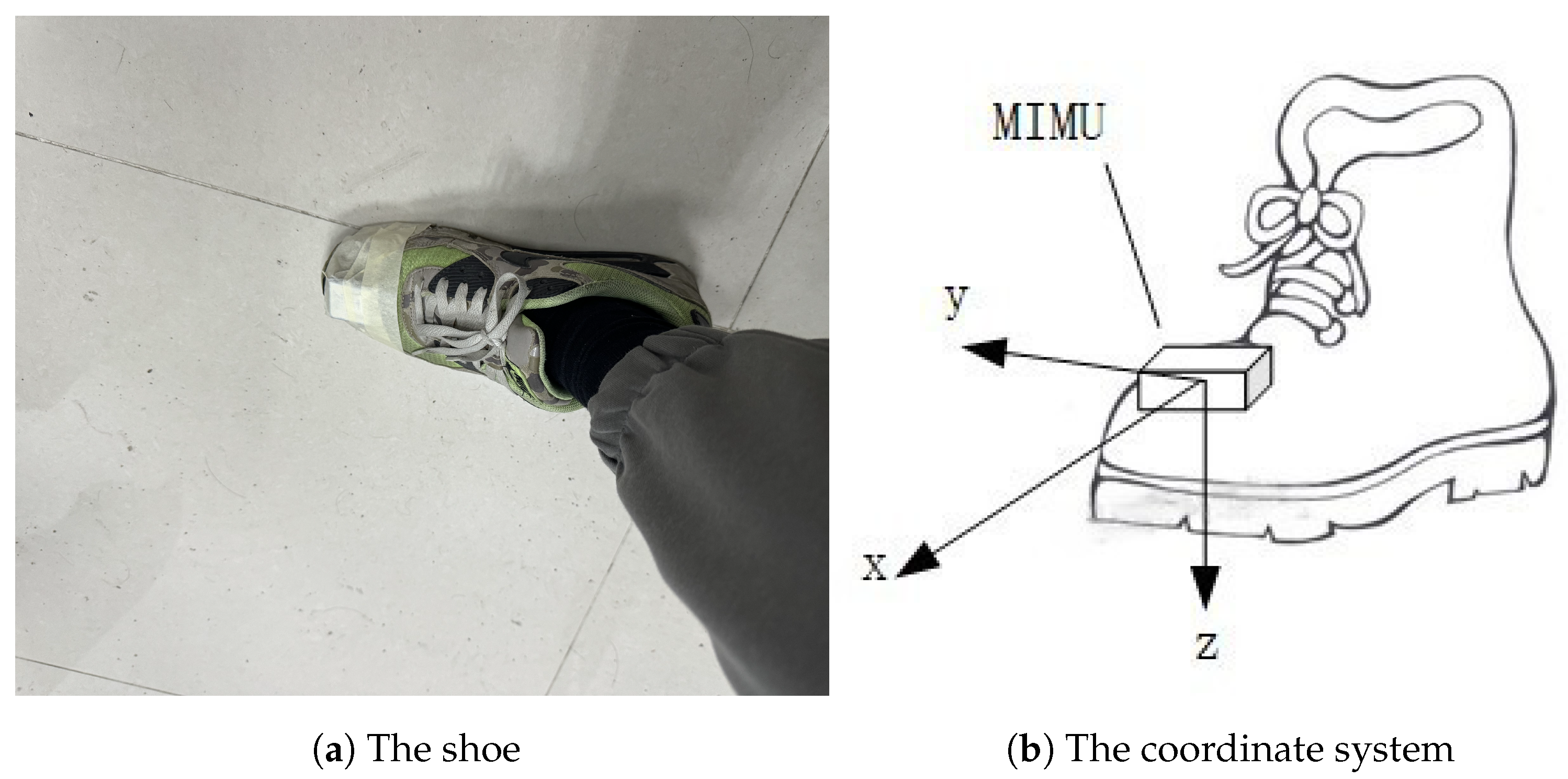
4. Experiments
4.1. Settings
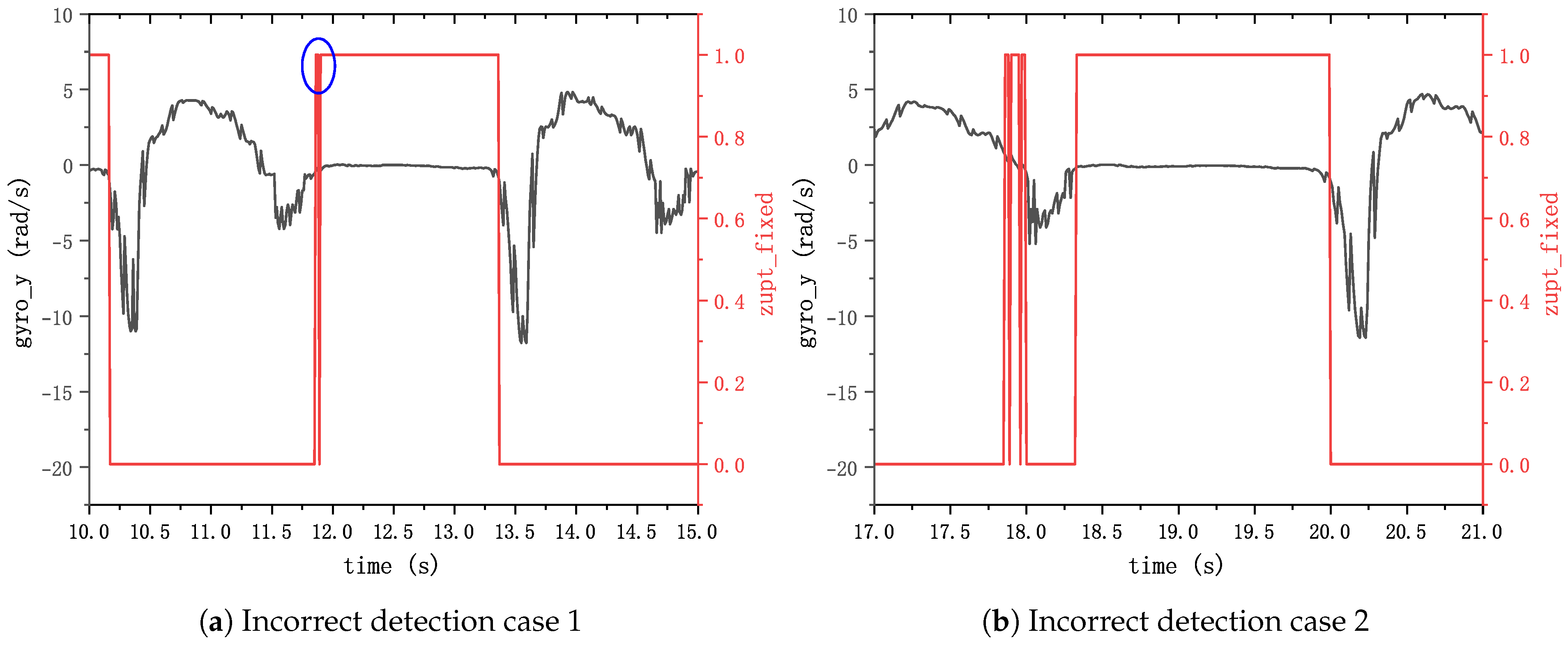
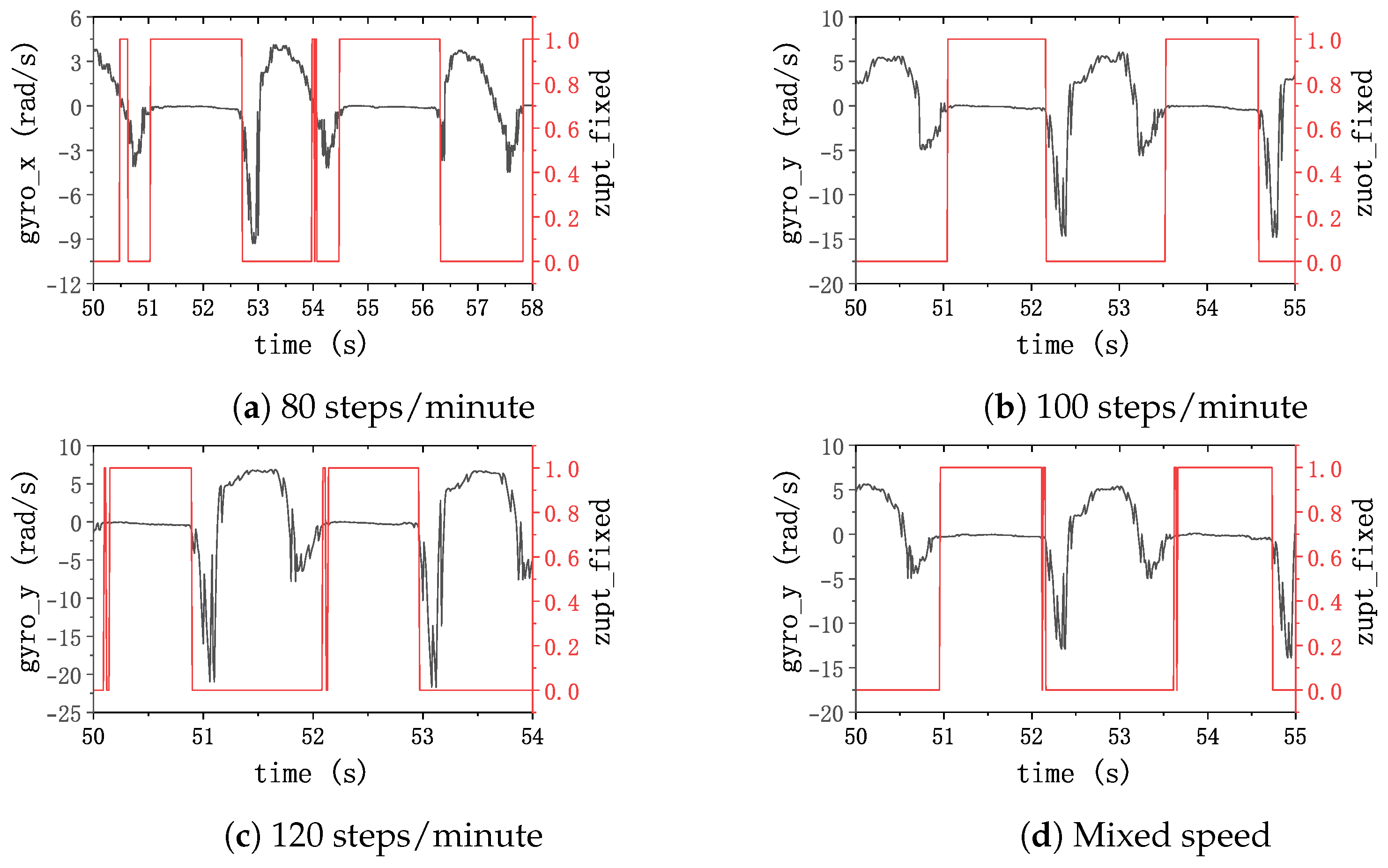
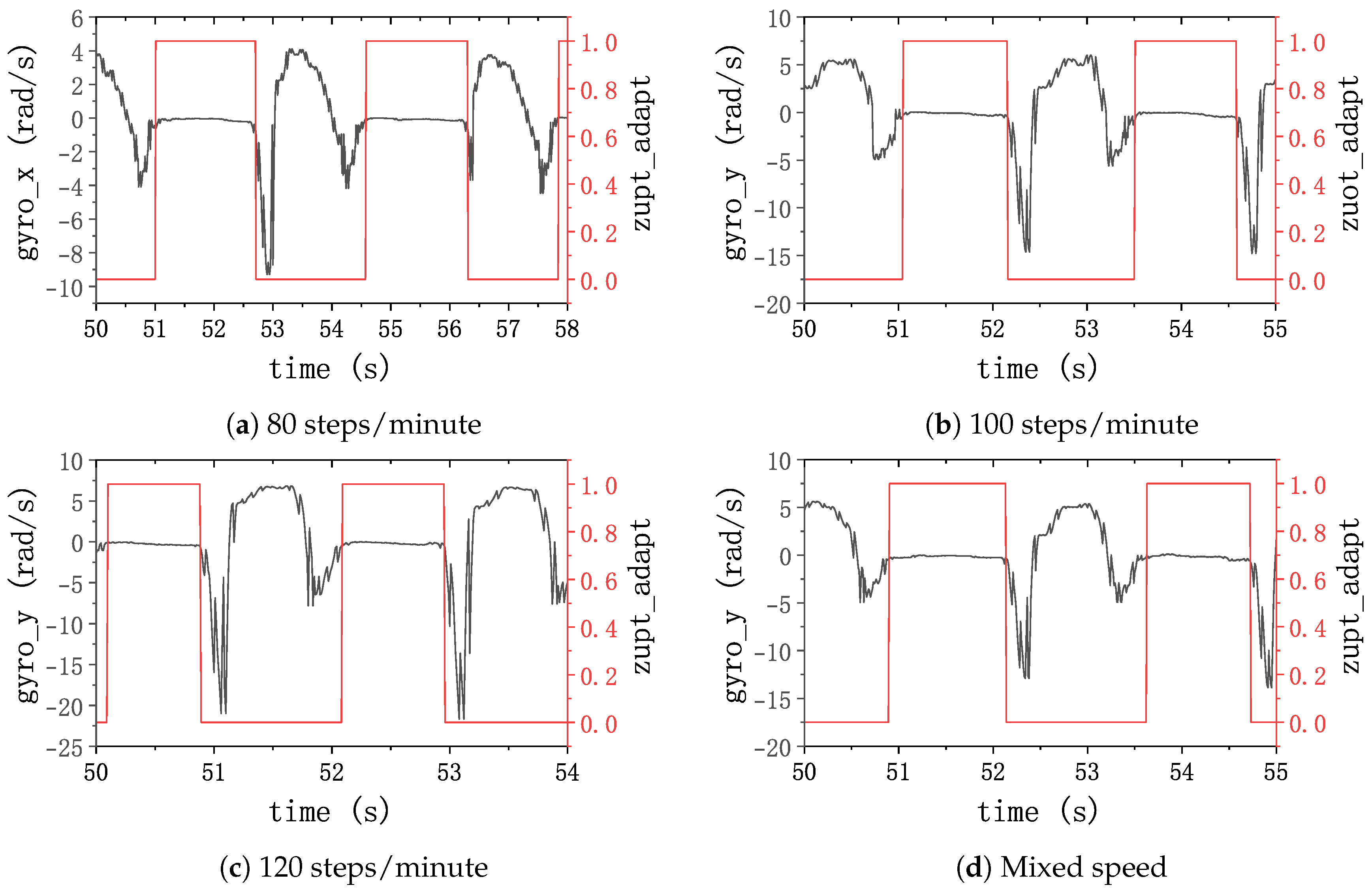
4.2. Zero-Velocity Interval Detection Experiment
4.3. Single-Step Detection Experiments
4.4. Pedestrian Walking Localization Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IMU | inertial measurement unit |
| ZUPT | zero-velocity update |
| GNSS | Global Navigation Satellite System |
| PNS | pedestrian navigation systems |
| AWGF-ZVD | adaptive window gait frequency-based zero-velocity detector |
| SINS | strapdown inertial navigation algorithm |
References
- Yao, S.; Su, Y.; Zhu, X. High Precision Indoor Positioning System Based on UWB/MINS Integration in NLOS Condition. J. Electr. Eng. Technol. 2022, 17, 1415–1424. [Google Scholar] [CrossRef]
- Rodrigues, B.; Halter, C.; Franco, M.; Scheid, E.J.; Killer, C.; Stiller, B. BluePIL: A Bluetooth-based Passive Localization Method. In Proceedings of the 2021 IFIP/IEEE International Symposium on Integrated Network Management (IM), Bordeaux, France, 8–20 May 2021; pp. 28–36. [Google Scholar]
- Shamaei, K.; Khalife, J.; Kassas, Z.M. Performance Characterization of Positioning in LTE Systems. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 2262–2270. [Google Scholar]
- Taneja, A.; Rani, S.; Breñosa, J.; Tolba, A.; Kadry, S. An Improved WiFi Sensing Based Indoor Navigation with Reconfigurable Intelligent Surfaces for 6G Enabled IoT Network and AI Explainable Use Case. Future Gener. Comput. Syst. 2023, 149, 294–303. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Gr. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Ma, M.; Song, Q.; Li, Y.; Zhou, Z. A zero-velocity intervals Detection Algorithm Based on Sensor Fusion for Indoor Pedestrian Navigation. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 15–17 December 2017; pp. 418–423. [Google Scholar]
- Bai, N.; Tian, Y.; Liu, Y.; Yuan, Z.; Xiao, Z.; Zhou, J. A High-Precision and Low-Cost IMU-Based Indoor Pedestrian Positioning Technique. IEEE Sens. J. 2020, 20, 6716–6726. [Google Scholar] [CrossRef]
- Tian, X.; Chen, J.; Han, Y.; Yang, L.; Yin, J. Zero-Velocity Detection algorithm for pedestrian navigation with multiconditional constraints. J. Chin. Inert. Technol. 2016, 24, 1–5. [Google Scholar] [CrossRef]
- Wagstaff, B.; Peretroukhin, V.; Kelly, J. Improving Foot-Mounted Inertial Navigation through Real-Time Motion Classification. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Ma, M.; Song, Q.; Gu, Y.; Li, Y.; Zhou, Z. An Adaptive zero-velocity Detection Algorithm Based on Multi-Sensor Fusion for a Pedestrian Navigation System. Sensors 2018, 18, 3261. [Google Scholar] [CrossRef] [PubMed]
- Kone, Y.; Zhu, N.; Renaudin, V.; Ortiz, M. Machine Learning-Based Zero-Velocity Detection for Inertial Pedestrian Navigation. IEEE Sens. J. 2020, 20, 12343–12353. [Google Scholar] [CrossRef]
- Chen, Z.; Pan, X. A Novel Zero-Velocity Detector for Pedestrian Inertial Navigation Based on Deep Learning. In Proceedings of the 2021 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; pp. 807–811. [Google Scholar]
- Wagstaff, B.; Kelly, J. LSTM-Based Zero-Velocity Detection for Robust Inertial Navigation. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Shi, X.; Wang, Z.; Zhao, H.; Qiu, S.; Liu, R.; Lin, F.; Tang, K. Threshold-Free Phase Segmentation and zero-velocity Detection for Gait Analysis Using Foot-Mounted Inertial Sensors. IEEE Trans. Hum.-Mach. Syst. 2023, 53, 176–186. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, H.; Qiu, S.; Gao, Q. Stance-Phase Detection for ZUPT-Aided Foot-Mounted Pedestrian Navigation System. IEEE/ASME Trans. Mechatron. 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Sun, B.; Wang, Y.; Banda, J. Gait Characteristic Analysis and Identification Based on the iPhone’s Accelerometer and Gyrometer. Sensors 2014, 14, 17037–17054. [Google Scholar] [CrossRef] [PubMed]
- Tian, X.; Chen, J.; Han, Y.; Shang, J.; Li, N. A Novel zero-velocity interval Detection Algorithm for Self-Contained Pedestrian Navigation System with Inertial Sensors. Sensors 2016, 16, 1578. [Google Scholar] [CrossRef] [PubMed]
- Nawab, S.; Quatieri, T.; Lim, J. Signal Reconstruction from Short-Time Fourier Transform Magnitude. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 986–998. [Google Scholar] [CrossRef]
- Martin, W.; Flandrin, P. Wigner-Ville Spectral Analysis of Nonstationary Processes. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1461–1470. [Google Scholar] [CrossRef]
- Varanis, M.; Silva, A.L.; Balthazar, J.M.; Pederiva, R. A Tutorial Review on Time-Frequency Analysis of Non-Stationary Vibration Signals with Nonlinear Dynamics Applications. Braz. J. Phys. 2021, 51, 859–877. [Google Scholar] [CrossRef]
- Gabor, D. Theory of Communication. Part 1: The Analysis of Information. J. Inst. Electr.-Eng. Part III Radio Commun. Eng. 1946, 93, 429–441. [Google Scholar] [CrossRef]
- Kwok, H.K.; Jones, D.L. Improved Instantaneous Frequency Estimation Using an Adaptive Short-Time Fourier Transform. IEEE Trans. Signal Process. 2000, 48, 2964–2972. [Google Scholar] [CrossRef]
- Chen, Z.; Pan, X.; Chen, C.; Wu, M. Contrastive Learning of Zero-Velocity Detection for Pedestrian Inertial Navigation. IEEE Sens. J. 2022, 22, 4962–4969. [Google Scholar] [CrossRef]
- Wang, Q.; Fu, M.; Wang, J.; Sun, L.; Huang, R.; Li, X.; Jiang, Z.; Huang, Y.; Jiang, C. Free-walking: Pedestrian inertial navigation based on dual foot-mounted IMU. Def. Technol. 2023; in press. [Google Scholar] [CrossRef]
- Scholkmann, F.; Boss, J.; Wolf, M. An Efficient Algorithm for Automatic Peak Detection in Noisy Periodic and Quasi-Periodic Signals. Algorithms 2012, 5, 588–603. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
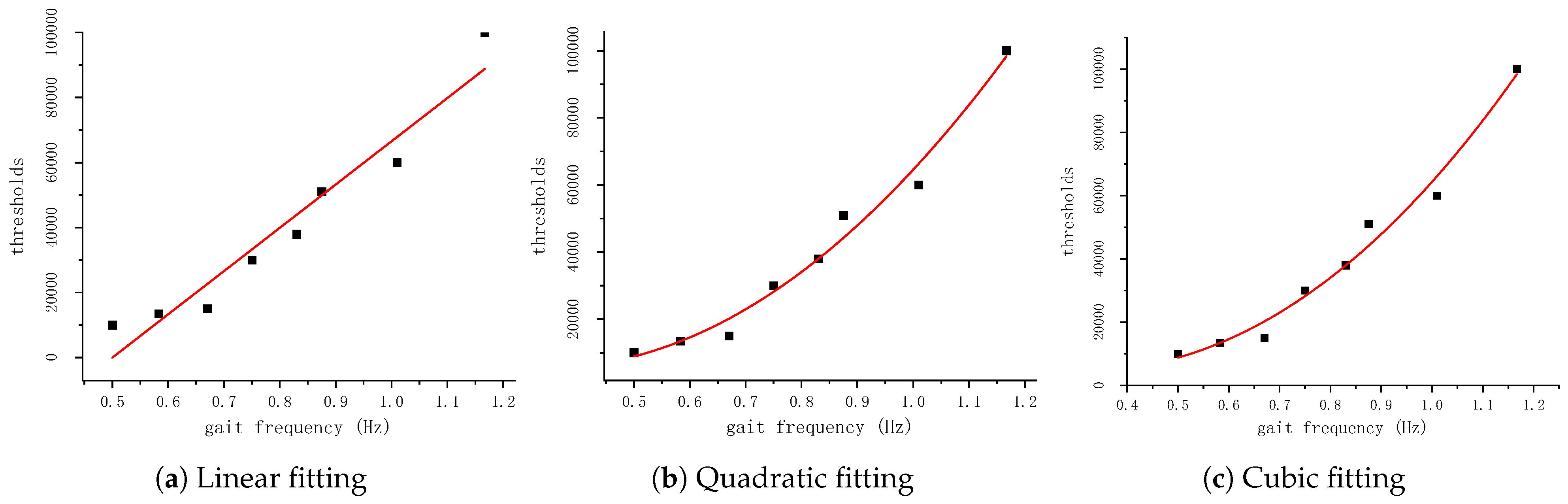
| Models | Linear | Quadratic | Cubic |
|---|---|---|---|
| Mathematical Equation | |||
| R-Squared | 0.93812 | 0.98139 | 0.9814 |
| RMSE | 8157.07 | 5476.63 | 4899.75 |
| Speed (steps/min) | Actual ZVI Number | Detected ZVI Numbers | |
|---|---|---|---|
| Fixed-Threshold 1 | Adaptive-Threshold | ||
| 80 | 100 | 121 | 100 |
| 100 | 100 | 100 | 100 |
| 120 | 100 | 105 | 100 |
| Mixed | 100 | 124 | 100 |
| Gait Frequency (Hz) | Adaptive-Threshold | Fixed-Threshold |
|---|---|---|
| 0.67 | 0.86% | 1.26% |
| 0.83 | 0.76% | 0.75% |
| 1 | 0.89% | 1.34% |
| Mixed 1 | 0.82% | 1.13% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Li, J.; Xu, G.; Wang, X. A Novel Zero-Velocity Interval Detection Algorithm for a Pedestrian Navigation System with Foot-Mounted Inertial Sensors. Sensors 2024, 24, 838. https://doi.org/10.3390/s24030838
Wang X, Li J, Xu G, Wang X. A Novel Zero-Velocity Interval Detection Algorithm for a Pedestrian Navigation System with Foot-Mounted Inertial Sensors. Sensors. 2024; 24(3):838. https://doi.org/10.3390/s24030838
Chicago/Turabian StyleWang, Xiaotao, Jiacheng Li, Guangfei Xu, and Xingyu Wang. 2024. "A Novel Zero-Velocity Interval Detection Algorithm for a Pedestrian Navigation System with Foot-Mounted Inertial Sensors" Sensors 24, no. 3: 838. https://doi.org/10.3390/s24030838
APA StyleWang, X., Li, J., Xu, G., & Wang, X. (2024). A Novel Zero-Velocity Interval Detection Algorithm for a Pedestrian Navigation System with Foot-Mounted Inertial Sensors. Sensors, 24(3), 838. https://doi.org/10.3390/s24030838