



Research and Verification of a Novel Interferometry Method by Joint Processing of Downlink Pseudo-Noise Ranging and DOR Signals for Deep Space Exploration


Abstract
1. Introduction
2. Problem Description
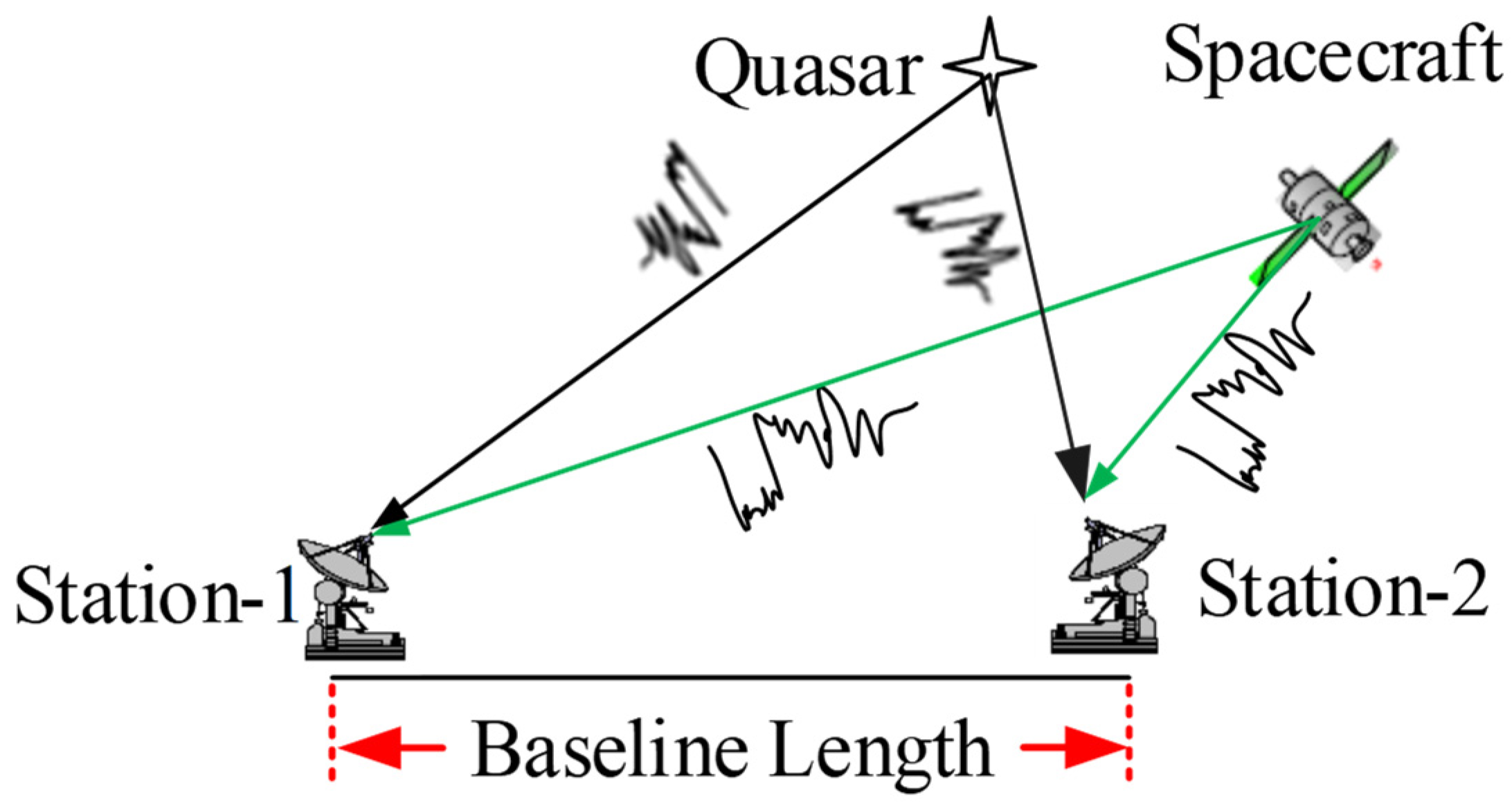
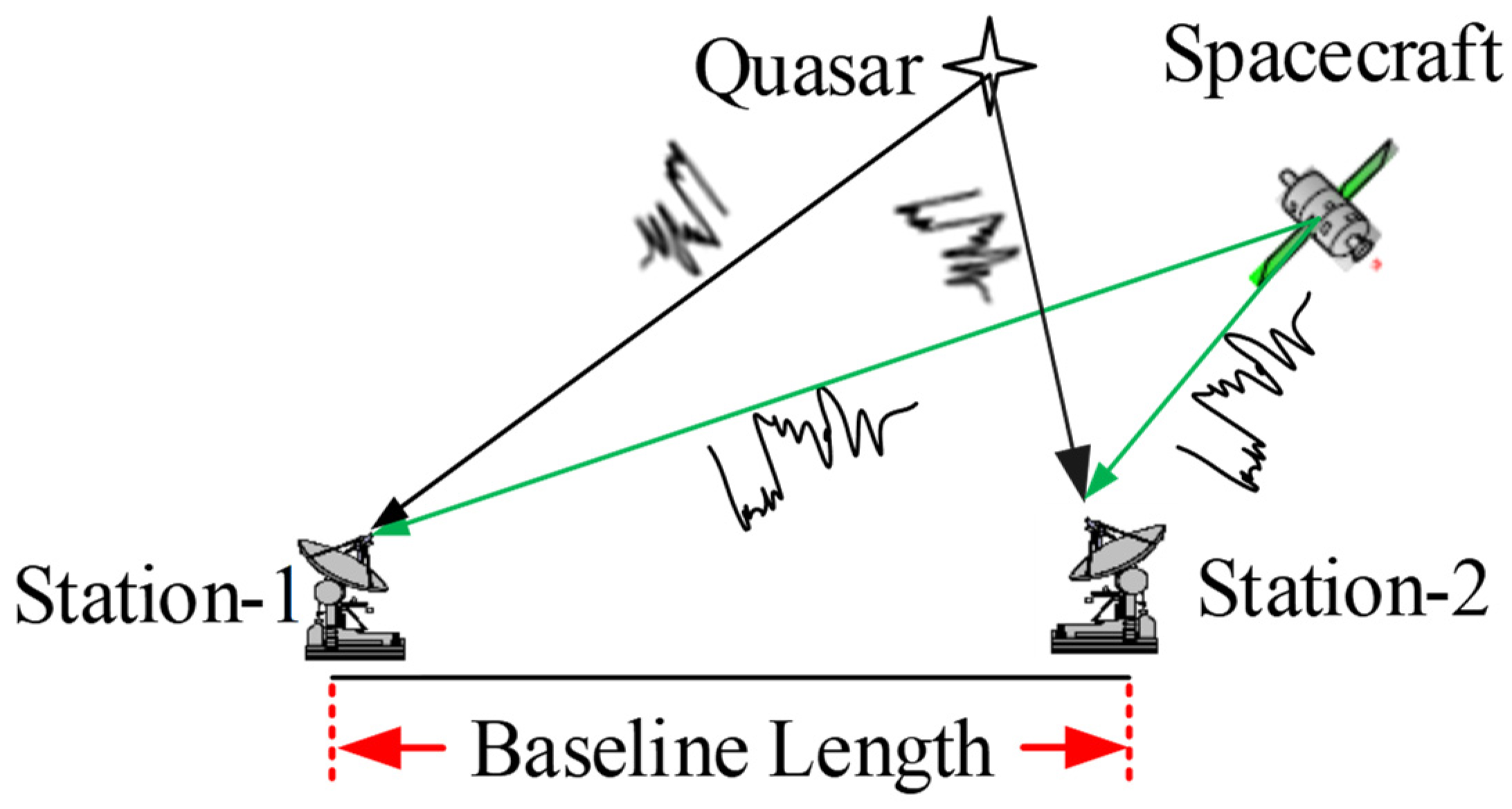
2.1. The Basic Principle of ΔDOR
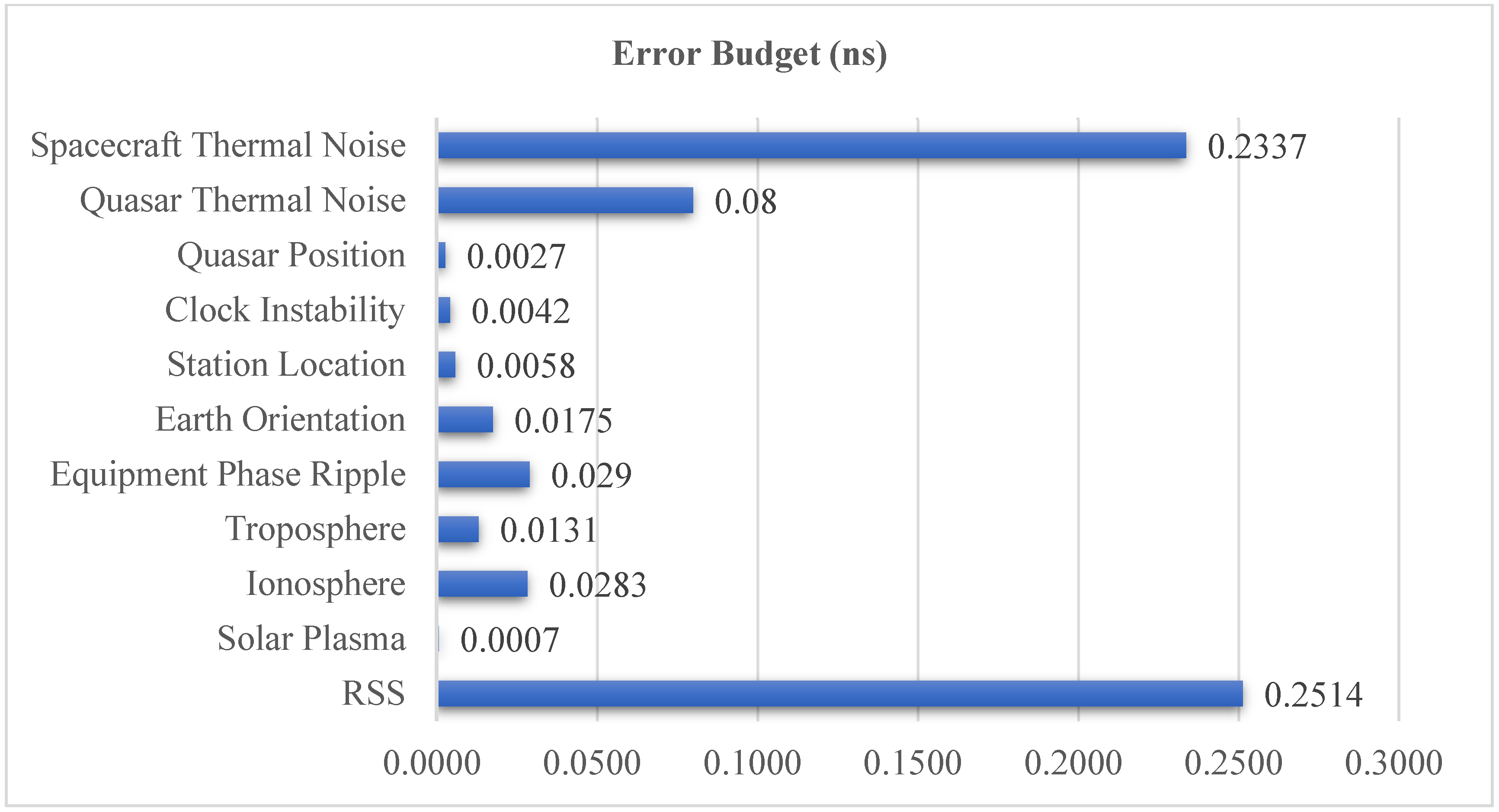
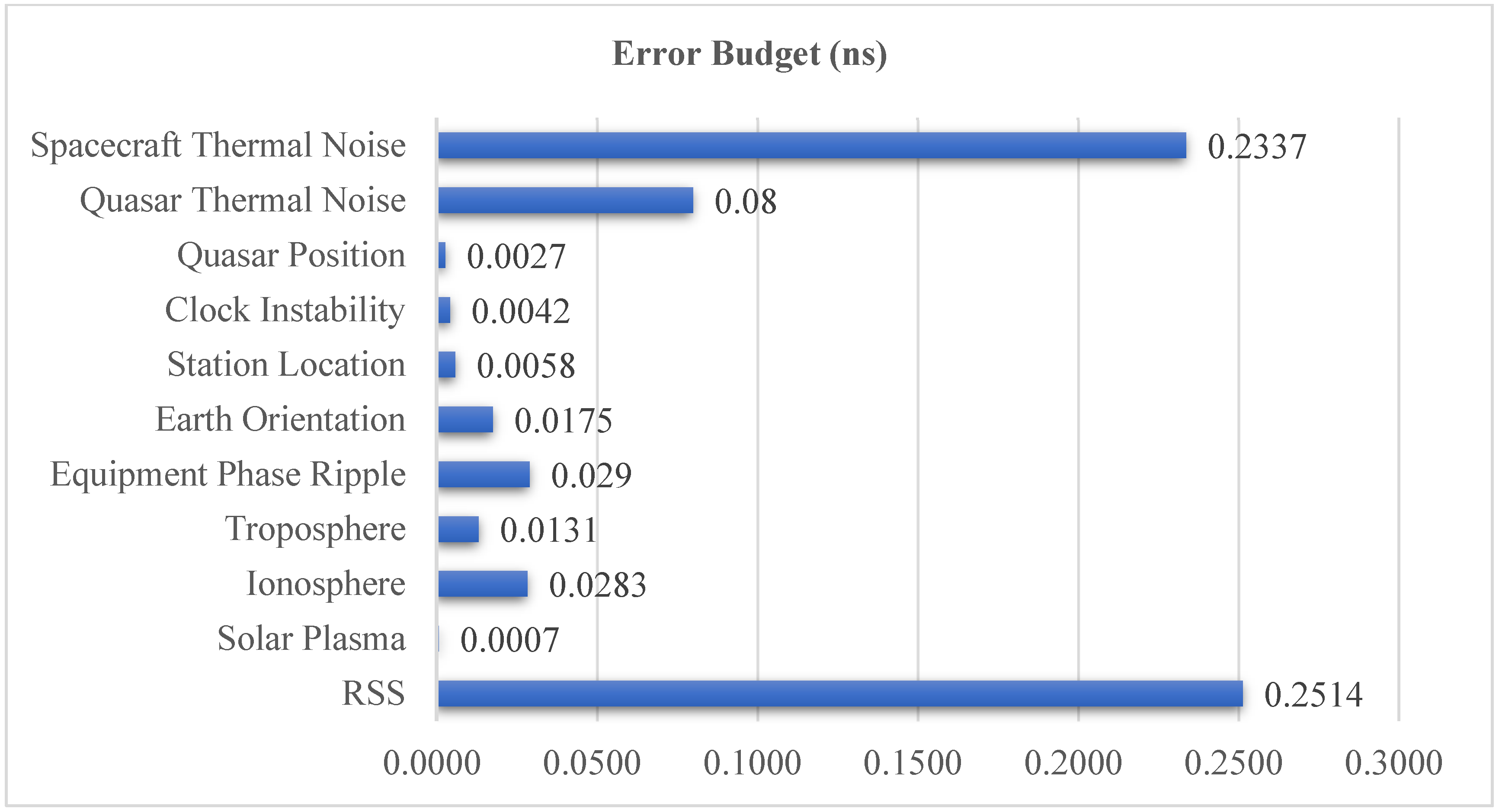
2.2. Error Budget Analysis
3. Materials and Methods
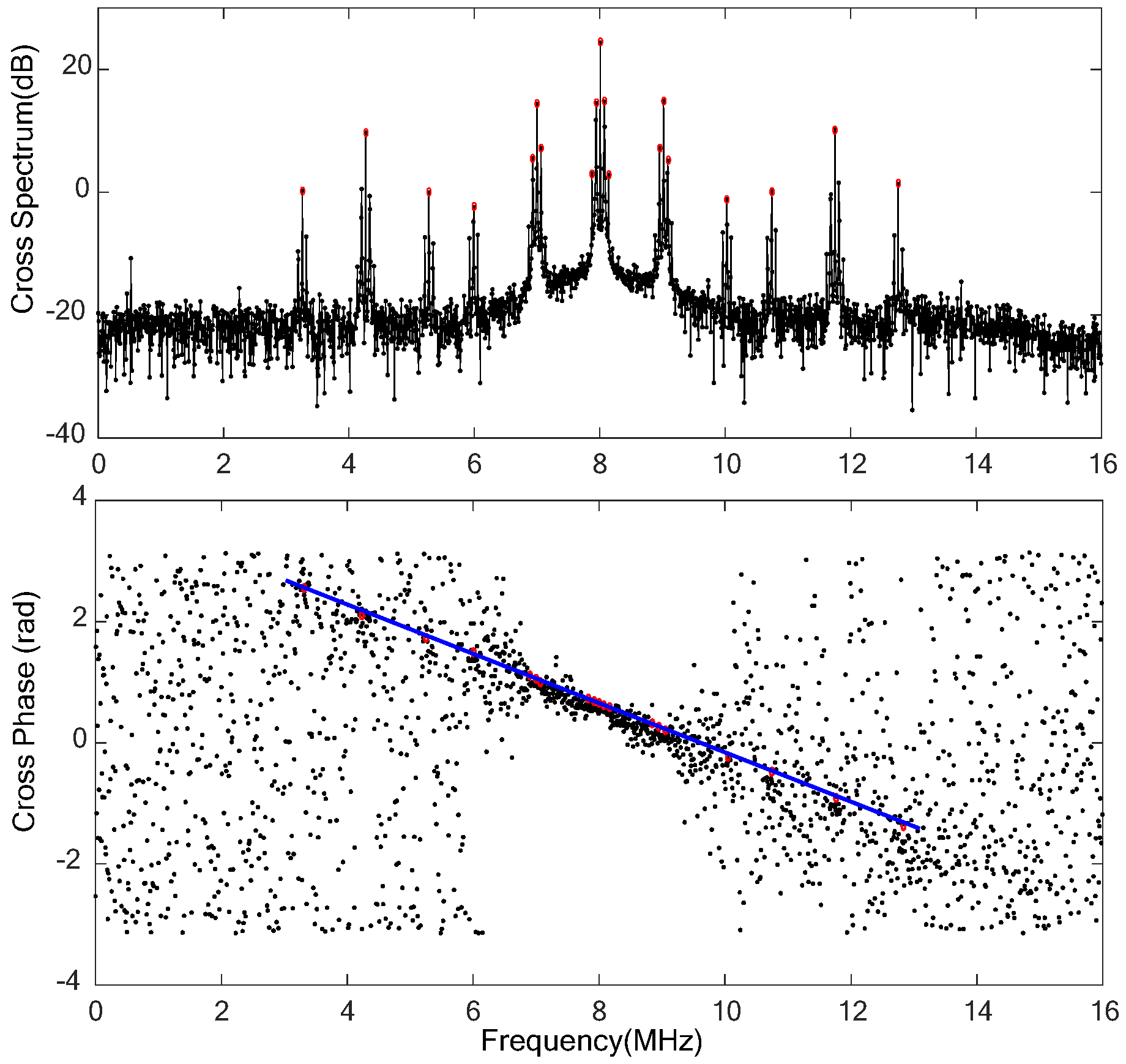
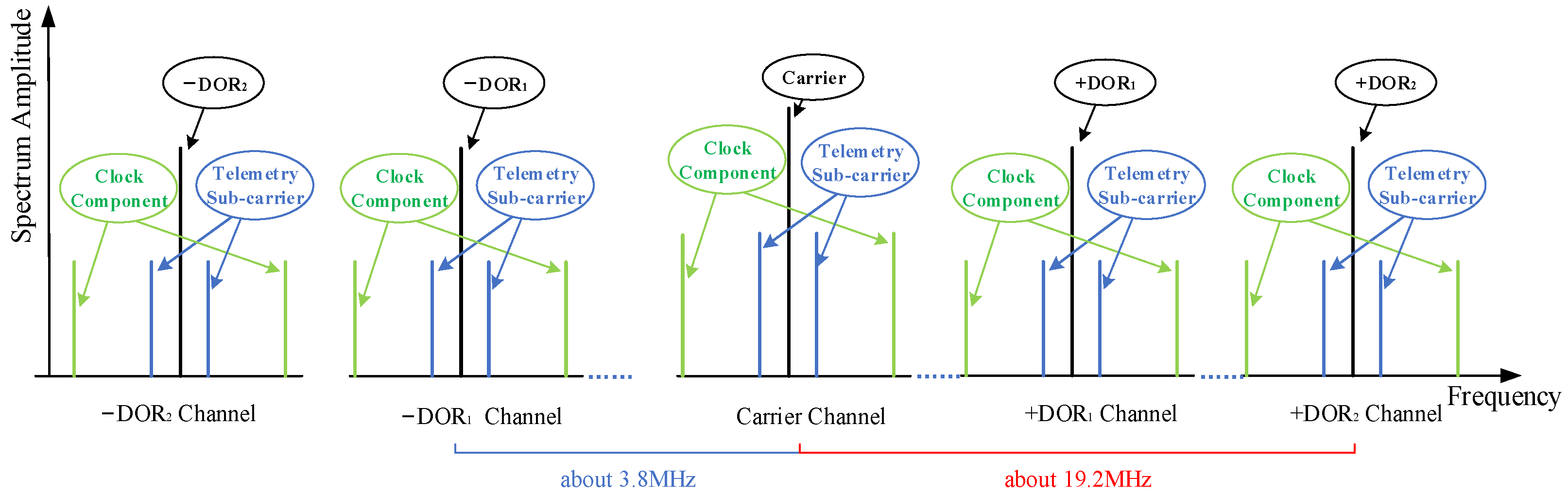
3.1. Downlink Signal Spectrum Structure
3.2. Proposed Method
- Step 1:
- sample and record the four signals including −DOR2, −PNc or +PNc, carrier, and +DOR2.
- Step 2:
- compensate the raw data recorded on the stations by using the initial delay model, and then conduct correlation to obtain the cross-phases of the four signals in Step 1.
- Step 3:
- obtain the coarse time delay estimation by jointly processing the −PNc or +PNc signal and the carrier signal.
- Step 4:
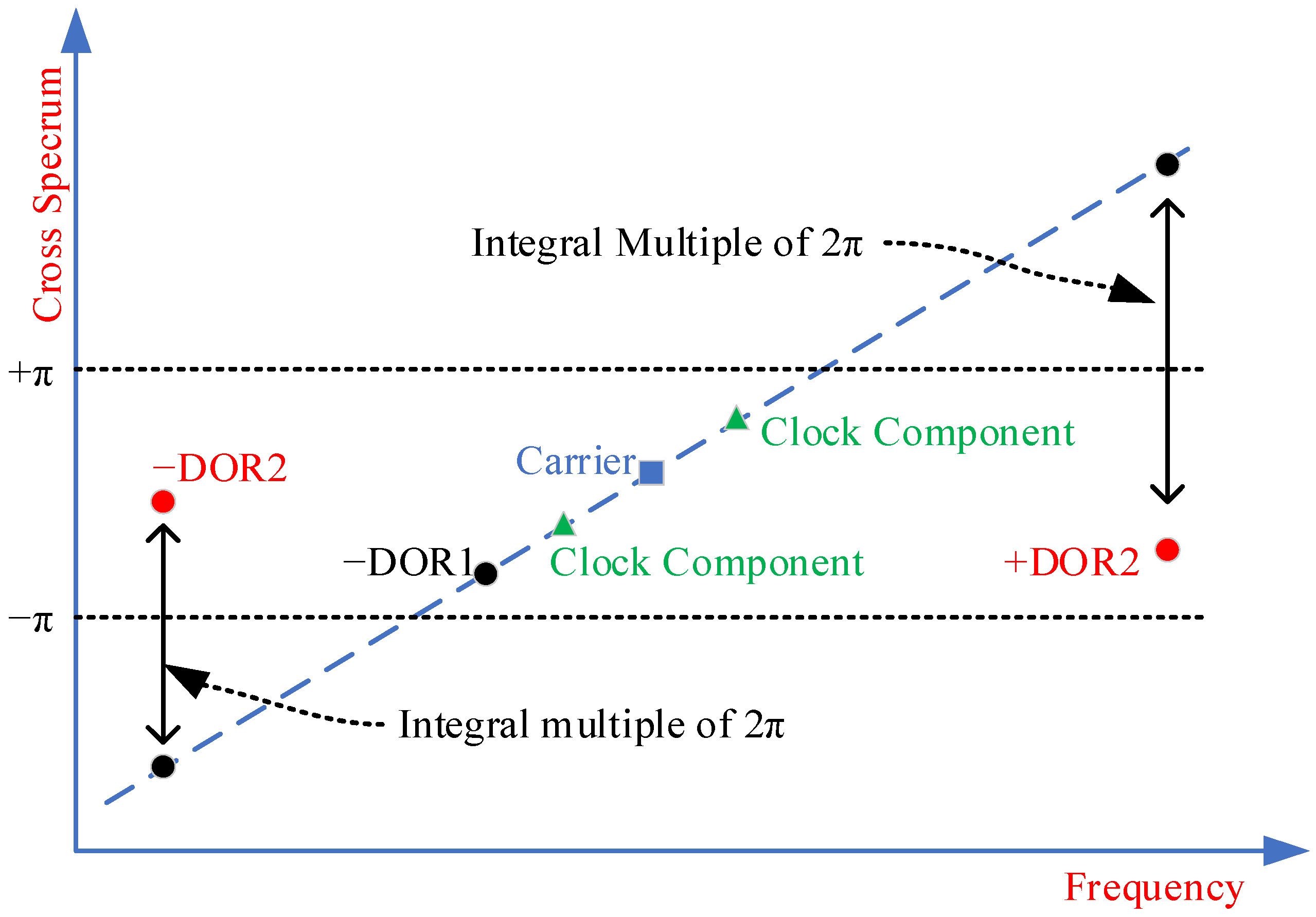
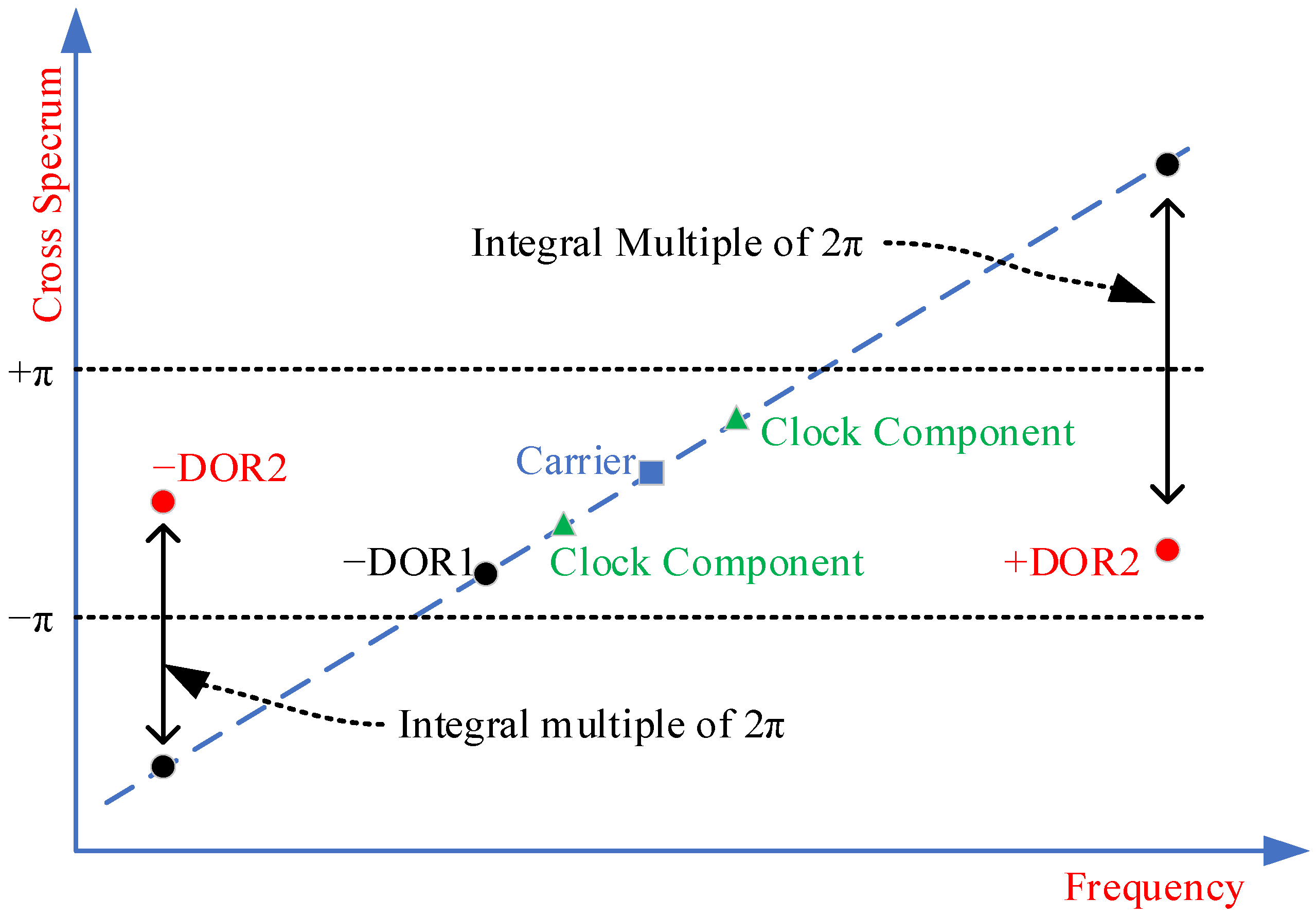
- calculate the ambiguity of the cross-phase of the ±DOR2 signal by using the coarse time delay estimation from Step 3.
- Step 5:
- modify the cross-phase of the ±DOR2 signal by integer multiples of 2π.
- Step 6:
- synchronize the modified ±DOR2 signal, −PNc or +PNc, and carrier to estimate the high-precision interferometry delay.
4. Improvement Analysis of Downlink Signal Power Utilization Efficiency
5. Results
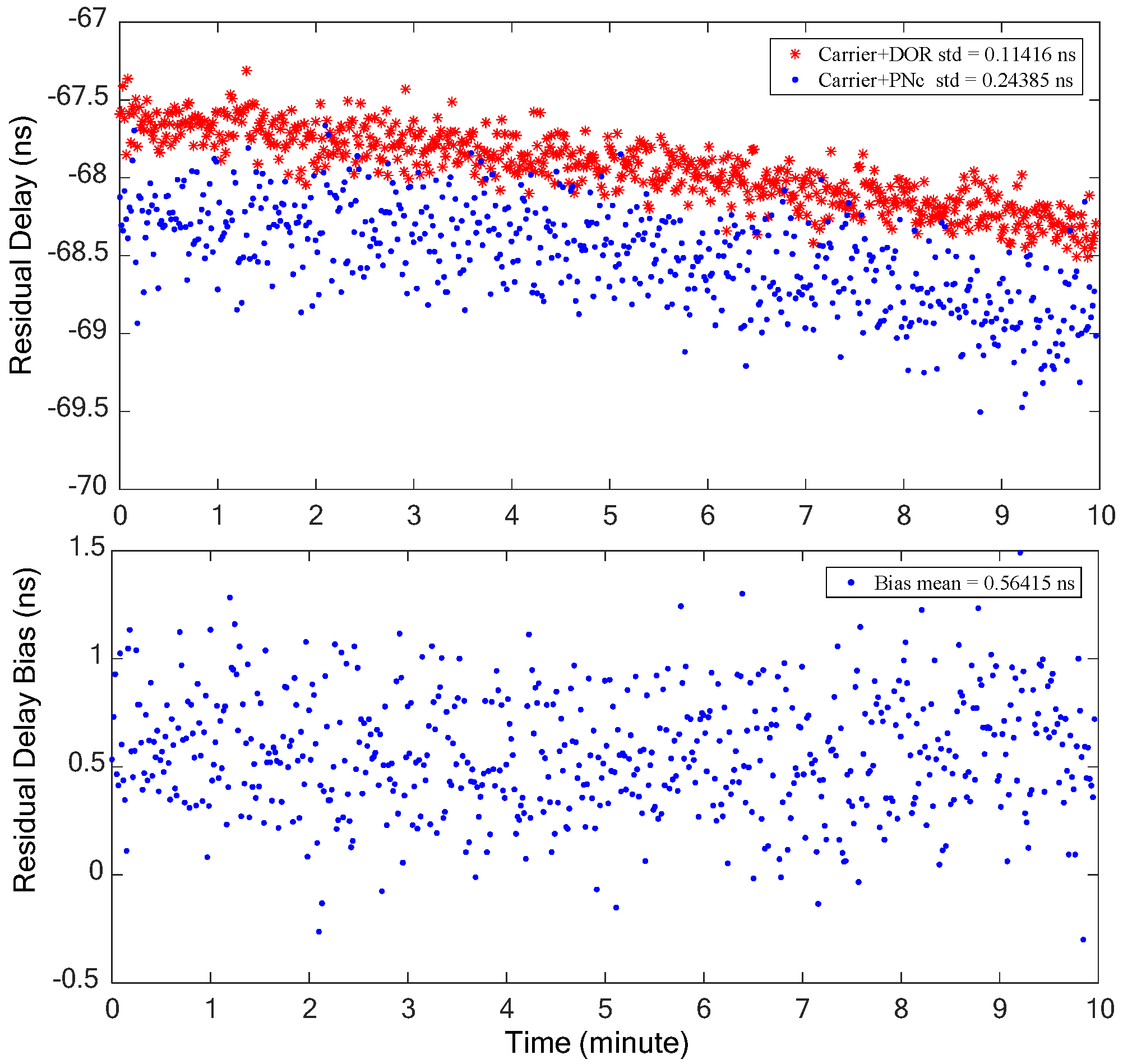
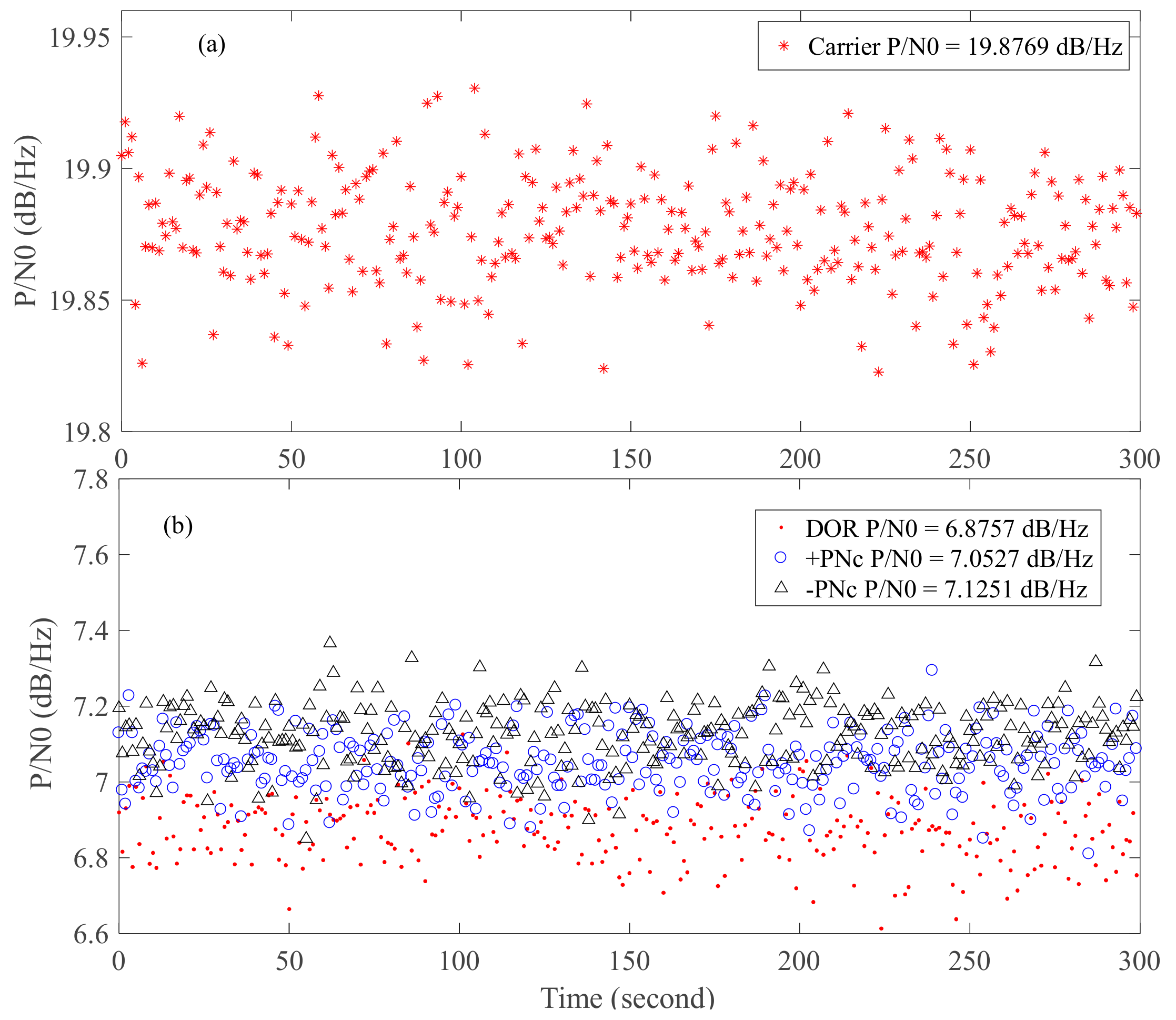
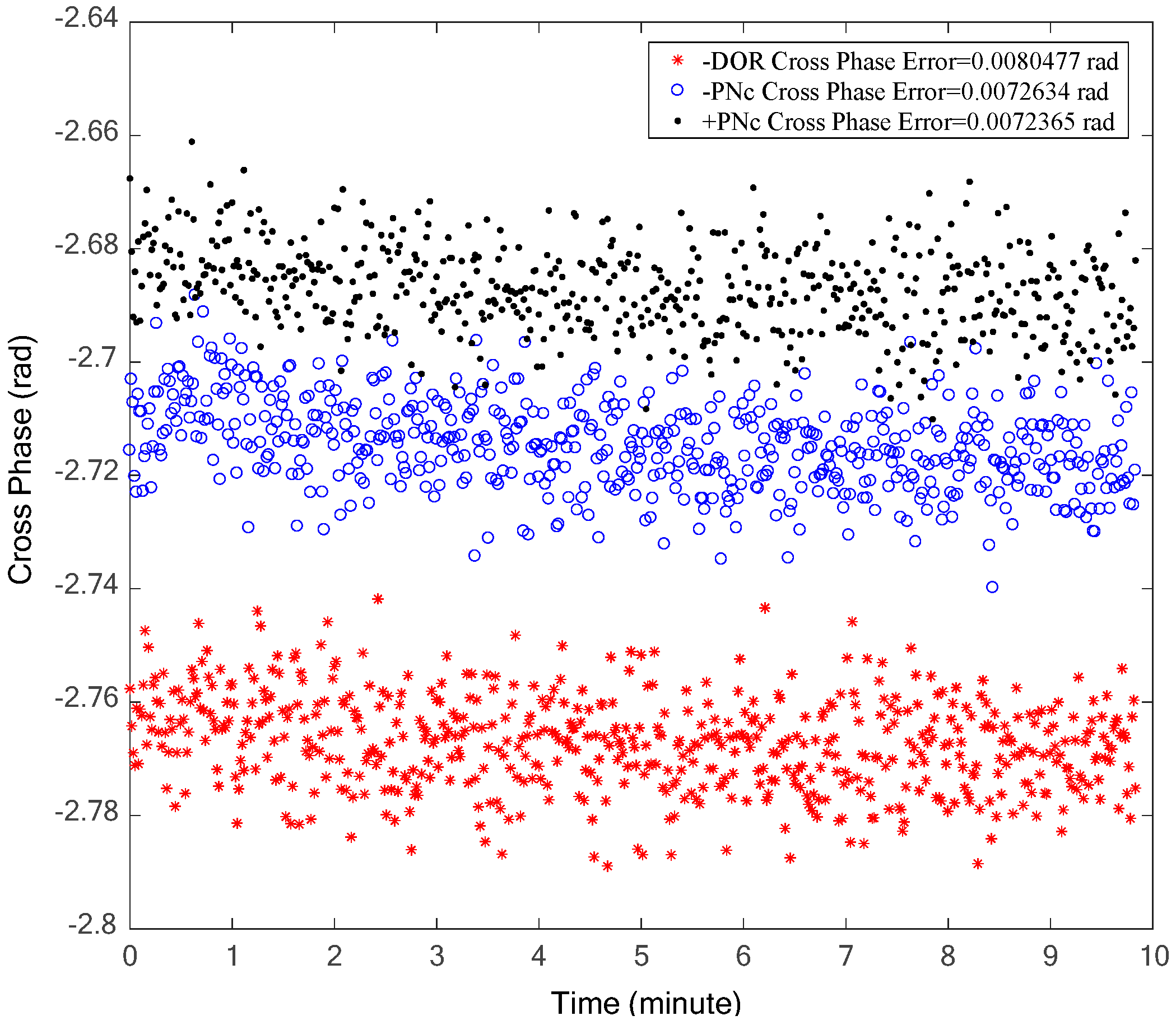
5.1. Verification and Analysis of S-Band Test Data
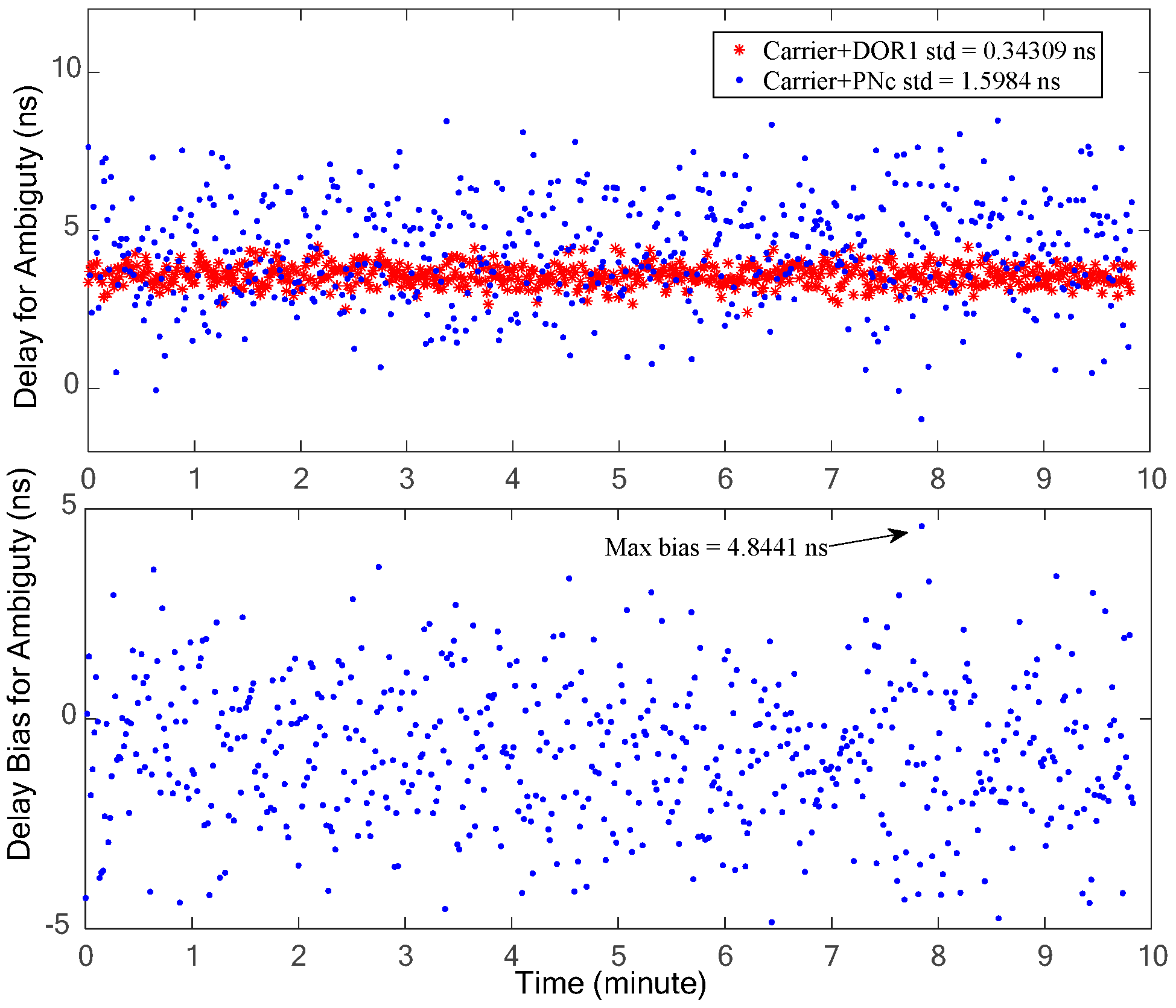
5.2. Verification and Analysis of X-Band Test Data
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, H.; Feng, G.; Zhu, Z. Deep Space TT&C Transponder Technology; TSINGHUA University Press: Beijing, China, 2014. [Google Scholar]
- Li, H. Principles and Design Methods of Deep Space TT&C System; TSINGHUA University Press: Beijing, China, 2014. [Google Scholar]
- Tang, G. Radiometric Measuring Techniques for Deep Space Navigation; National Defense Industry Press: Beijing, China, 2012. [Google Scholar]
- Ju, L.; Zhang, B.; Zhang, X. Research on Pseudo-noise Ranging Technologies for DSN Network. J. Spacecr. TT C Technol. 2005, 24, 9–13. [Google Scholar]
- Wang, Q.; Wu, B. Analysis on Precision of Pseudo Noise Code Ranging in Space TT&C Systems. Radio Eng. 2009, 39, 39–44. [Google Scholar]
- Niu, D.; Duan, J.; Ouyang, Q.; Zhang, Y.; Chen, L.; Wang, M. Regenerative Pseudo-Random Code Ranging Orbit Determination Accuracy Analysis for Chang’E-4 Relay Satellite. J. Deep Space Explor. 2022, 9, 21–28. [Google Scholar]
- Li, H.; Huang, L.; Hao, W. Interferometry Techniques for Deep Space Navigation; TSINGHUA University Press: Beijing, China, 2022. [Google Scholar]
- Sagdeyev, R.Z.; Kerzhanovitch, V.V.; Kogan, L.R.; Kostenko, V.I.; Linkin, V.M.; Matveyenko, L.I.; Nazirov, R.R.; Pogrebenko, S.V.; Struckov, I.A.; Preston, R.A.; et al. Differential VLBI measurements of the Venus atmosphere dynamics by balloons: VEGA project. Astron. Astrophys. 1992, 254, 387–392. [Google Scholar]
- Molotov, I. Experiments on the Differential VLBI Measurements with the Former Russian Deep Space Network; European Space Agency: Paris, France, 2004. [Google Scholar]
- Zheng, X.; Chen, G.; Chen, M.; Liu, Q.; Wu, Y.; Dai, Z.; Shi, X.; Zhao, R.; Chen, S. Resolution of VLBI Group Delay and Phase Delay from Telemetry Signal. Prog. Astron. 2013, 31, 89–99. [Google Scholar]
- Hao, W.; Li, H.; Huang, L.; Wang, H.; Fan, M. Development of a VLBI System for China’s Deep Space Network. J. Spacecr. TT C Technol. 2012, 31, 34–37. [Google Scholar]
- Wu, W.; Wang, G.; Jie, D.; Zhang, X.; Jiang, D. High-accuracy VLBI technique using ΔDOR signals. Sci. Sin. Inf. 2013, 43, 185–196. [Google Scholar] [CrossRef]
- Li, P.; Huang, Y.; Chang, S.; Hu, X.; Liu, Q.; Zheng, X.; Wang, G.; Zheng, W.; Fan, M. Positioning for the Chang’E-3 lander and rover using Earth-based observations. Chin. Sci. Bull. 2014, 59, 3162–3173. [Google Scholar]
- Liu, Q.; Wu, Y. Application of High Precision VLBI Technology in Deep Space Exploration. J. Deep Space Explor. 2015, 2, 208–212. [Google Scholar]
- Weiren, W.U.; Qinghui, L.I.; Yong, H.U.; Xiaoyu, H.O.; Degang, J.I.; Haitao, L.I. Design and Realization of Same-Beam Interferometry Measurement of CE-3. J. Deep Space Explor. 2015, 2, 34–42. [Google Scholar]
- Lu, W.; Xie, J.; Chen, L.; Han, S.; Ren, T. A Relative Interferometry Method for Aiding Orbit Determination in Deep Space Exploration. Aerosp. Control 2019, 37, 35–40. [Google Scholar]
- Liu, S.; Huang, Y.; Li, P.; Yang, P. Determination of the Orbit of Chang’E-4 Relay Satellite under Sparse Observation. J. Deep Space Explor. 2022, 9, 14–20. [Google Scholar]
- Xiao, W.; Yang, P.; Zhang, Z.B.; Wang, G.L. Application of Two Time Delay Correction Methods in the ΔDOR Measurement of Chang’E 4 Probe. Prog. Astron. 2022, 40, 142–154. [Google Scholar]
- Ren, T.; Lu, W.; Kong, J.; Xie, J.; Han, S.; Wang, M.; Man, H.; Niu, W.; Liu, H.; Zhou, Z. Performance Analysis of Deep-Space Interferometry in Chang’E-5 Mission. J. Deep Space Explor. 2021, 8, 572–581. [Google Scholar]
- Kong, J.; Zhang, Y.; Ren, T.; Ouyang, Q.; Li, C.; Duan, J.; Shen, Q.; Chen, M. Orbit Determination Ability of Chang’E-5 Based on CDSN Tracking Data. J. Astronaut. 2022, 43, 183–188. [Google Scholar]
- Guo, L.; Huang, Y.; Li, J.; Wang, G.; Wang, W.; Zheng, W. Real-time relative positioning of Chang’e-5 satellite in rendezvous and docking with the same-beam VLBI differential observations. Acta Geod. Cartogr. Sin. 2023, 52, 375–382,396. [Google Scholar]
- Liu, Q.; Huang, Y.; Shu, F.; Wang, G.; Zhang, J.; Chen, Z.; Li, P.; Ma, M.; Hong, X. VLBI technique for the orbit determination of Tianwen-1. Sci. Sin. (Phys. Mech. Astron.) 2022, 52, 71–81. [Google Scholar] [CrossRef]
- Yang, P.; Huang, Y.; Li, P.; Liu, Q.; Qin, S.; Shan, Q.; Liu, S. Positioning and Accuracy Analysis of Tianwen-1 Mars Rover Based on Same-Beam VLBI Measurement. Geomat. Inf. Sci. Wuhan Univ. 2023, 43, 84–91. [Google Scholar]
- The Consultative Committee for Space Data Systems. Delta-DOR—Technical Characteristics and Performance; CCSDS 500.1-G-2, Green Book, Issue 2; CCSDS Secretariat, National Aeronautics and Space Administration: Washington, DC, USA, 2019. [Google Scholar]
- The Consultative Committee for Space Data Systems. Delta-Differential One Way Ranging (Delta-DOR) Operations; CCSDS 506.0-M-2, Magenta Book, Issue 2; CCSDS Secretariat, National Aeronautics and Space Administration: Washington, DC, USA, 2018. [Google Scholar]
- Xu, D.; Huang, L.; Chen, S. Integrated design of ranging and DOR signal for China’s deep space navigation. Open Astron. 2022, 31, 358–365. [Google Scholar] [CrossRef]
- Border, J.S.; Koukos, J.A. Technical Characteristics and Accuracy Capabilities of Delta Differential One-Way Ranging (Delta DOR) as a Spacecraft Navigation Tool. In Proceedings of the Meeting of CCSDS Subpanel 1E for Radio Frequency & Modulation Systems, Oberpfaffenhofen, Germany, 20–24 September 1993. [Google Scholar]
- Charlot, P.; Jacobs, C.S.; Gordon, D.; Lambert, S.; de Witt, A.; Böhm, J.; Fey, A.L.; Heinkelmann, R.; Skurikhina, E.; Titov, O.; et al. The third realization of the International Celestial Reference Frame by very long baseline interferometry. Astron. Astrophys. 2020, A159, 1–28. [Google Scholar] [CrossRef]
- Dong, G.; Li, G.; Wang, X. China Deep Space Network: System Design and Key Technologies (II): S/X/Ka-Band Deep Space TT&C System; TSINGHUA University Press: Beijing, China, 2016. [Google Scholar]
- The Consultative Committee for Space Data Systems. CCSDS 414.0-G-2, Pseudo-Noise (PN) Ranging Systems; CCSDS Secretariat: Washington, DC, USA, 2014. [Google Scholar]
- Rogers, A.E. Very Long Baseline Interferometry with Large Effective Bandwidth for Phase-Delay Measurements. Radio Sci. 1970, 5, 1239–1247. [Google Scholar] [CrossRef]
- James, S.B. Delta Differential One-way Range. DSN No.810-005, 210, Rev.A; Jet Propulsion Laboratory: Pasadena, CA, USA, 2015. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario ID | Modulation Signal | Modulation Degree | Power of Downlink Signal Relative to the Carrier |
|---|---|---|---|
| 1 | Telemetry signal | 0.8 rad | -- |
| Ranging signal | 0.6 rad | −15.09 dB | |
| DOR1 beacon signal | 0.5 rad | −16.80 dB | |
| DOR2 beacon signal | 0.5 rad | −16.80 dB | |
| 2 | Telemetry signal | 0.8 rad | -- |
| Ranging signal | 0.6 rad | −14.54 dB | |
| DOR1 beacon signal | 0.0 rad(detuned) | 0 dB | |
| DOR2 beacon signal | 0.5 rad | −16.25 dB | |
| 3 | Telemetry signal | 0.8 rad | -- |
| Ranging signal | 0.6 rad | −15.09 dB | |
| DOR1 beacon signal | 0.0 rad(detuned) | 0 dB | |
| DOR2 beacon signal | 0.7 rad | −13.60 dB |
| Scenario ID | Spacecraft Thermal Noise | Exploration Distance | RSS | RSS or Distance Percentage | Remark |
|---|---|---|---|---|---|
| 1 | 0.2337 ns | 400 million km | 0.2514 ns | 100% | Reference |
| 2 | 0.2199 ns | 400 million km | 0.2386 ns | 94.91% | Distance unchanged |
| 0.2337 ns | 425 million km | 0.2514 ns | 106.25% | RSS unchanged | |
| 3 | 0.1655 ns | 400 million km | 0.1896 ns | 75.42% | Distance unchanged |
| 0.2337 ns | 565 million km | 0.2514 ns | 141.25% | RSS unchanged |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, W.; Fan, M.; Chen, L.; Xu, D.; Zhang, Y.; Ren, T. Research and Verification of a Novel Interferometry Method by Joint Processing of Downlink Pseudo-Noise Ranging and DOR Signals for Deep Space Exploration. Sensors 2024, 24, 822. https://doi.org/10.3390/s24030822
Lu W, Fan M, Chen L, Xu D, Zhang Y, Ren T. Research and Verification of a Novel Interferometry Method by Joint Processing of Downlink Pseudo-Noise Ranging and DOR Signals for Deep Space Exploration. Sensors. 2024; 24(3):822. https://doi.org/10.3390/s24030822
Chicago/Turabian StyleLu, Weitao, Min Fan, Lue Chen, Dezhen Xu, Yujia Zhang, and Tianpeng Ren. 2024. "Research and Verification of a Novel Interferometry Method by Joint Processing of Downlink Pseudo-Noise Ranging and DOR Signals for Deep Space Exploration" Sensors 24, no. 3: 822. https://doi.org/10.3390/s24030822
APA StyleLu, W., Fan, M., Chen, L., Xu, D., Zhang, Y., & Ren, T. (2024). Research and Verification of a Novel Interferometry Method by Joint Processing of Downlink Pseudo-Noise Ranging and DOR Signals for Deep Space Exploration. Sensors, 24(3), 822. https://doi.org/10.3390/s24030822