
Development of Self-Sensing Asphalt Pavements: Review and Perspectives

 ,
,  ,
,  ,
, 
Abstract
1. Introduction
2. Composition of Self-Sensing Asphalt Pavements
2.1. Conductive Mechanism of Asphalt Mixtures
2.2. Conductive Additives
2.3. Dispersion Techniques
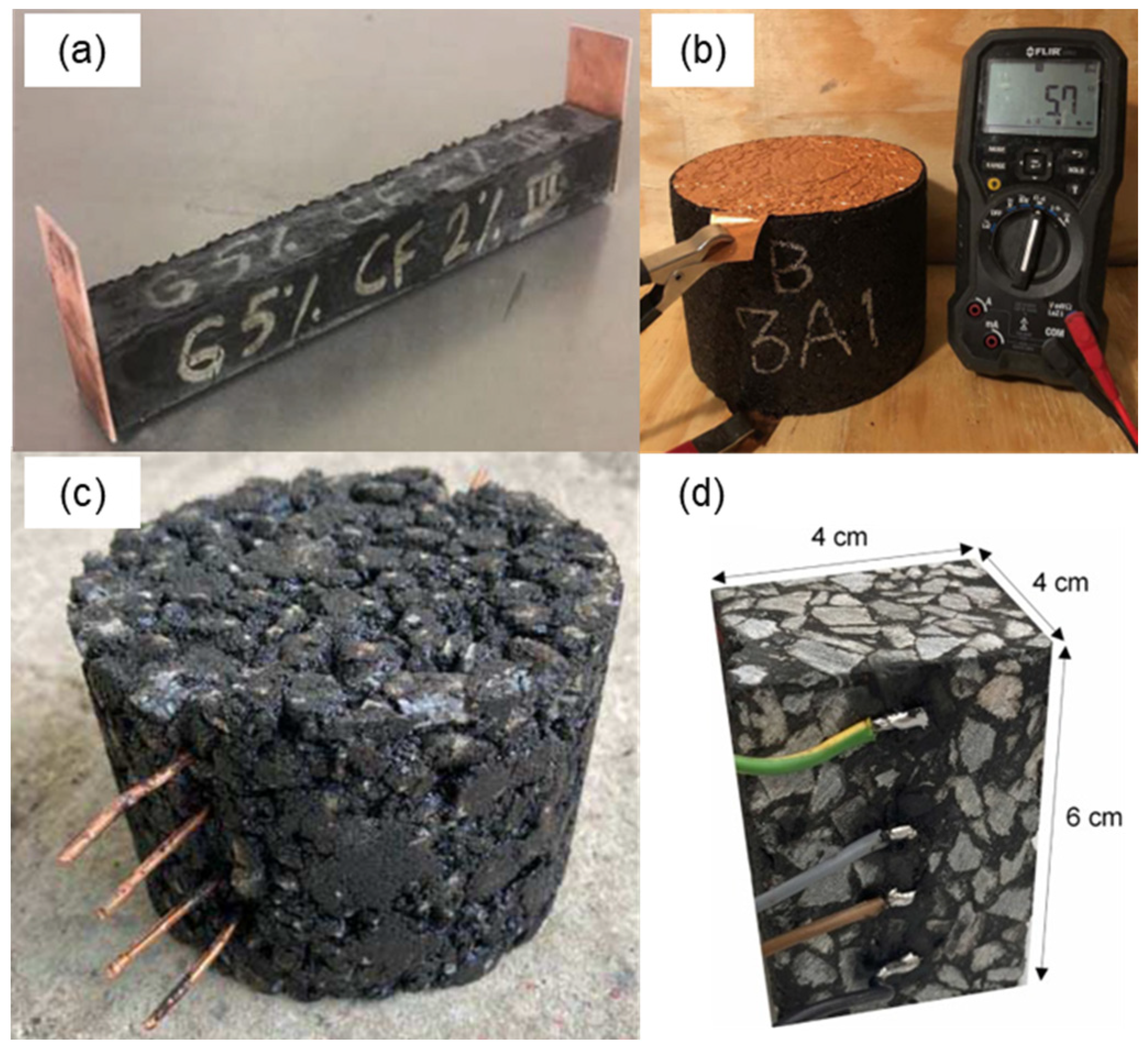
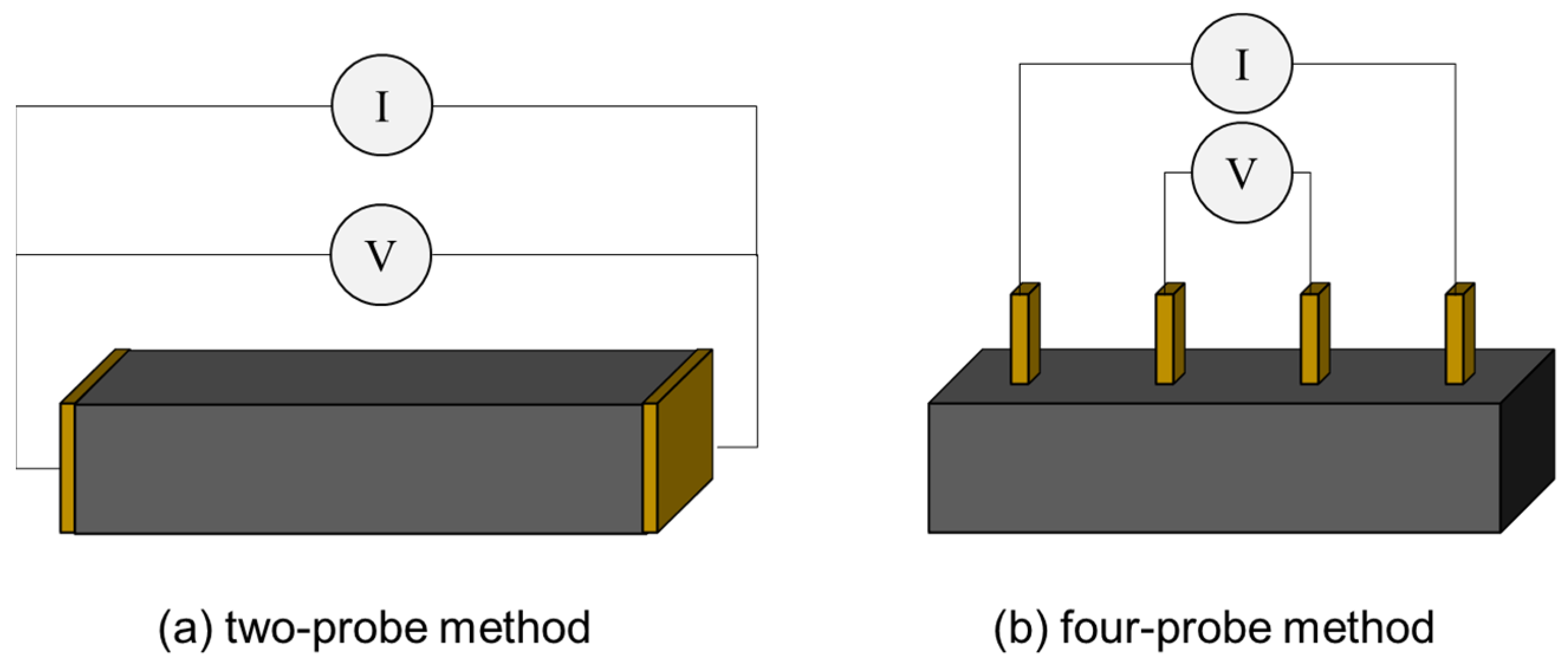
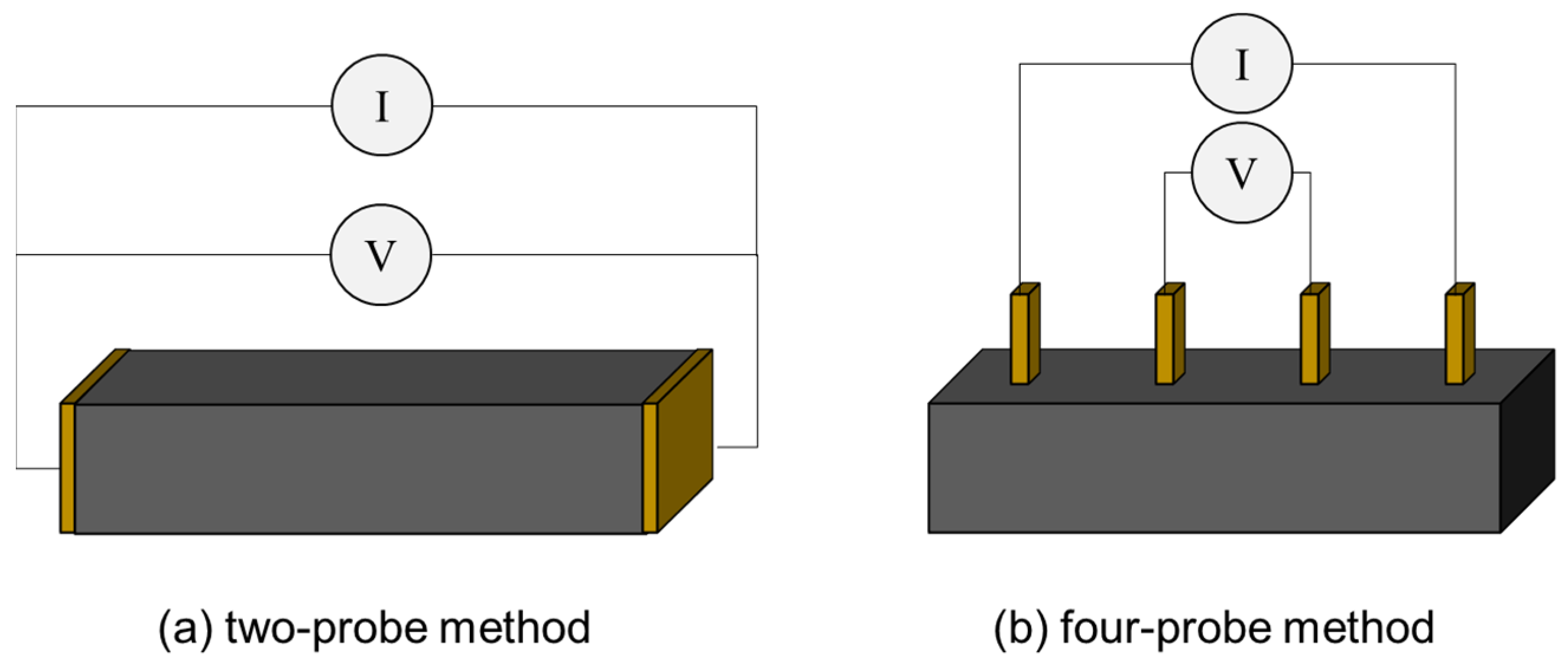
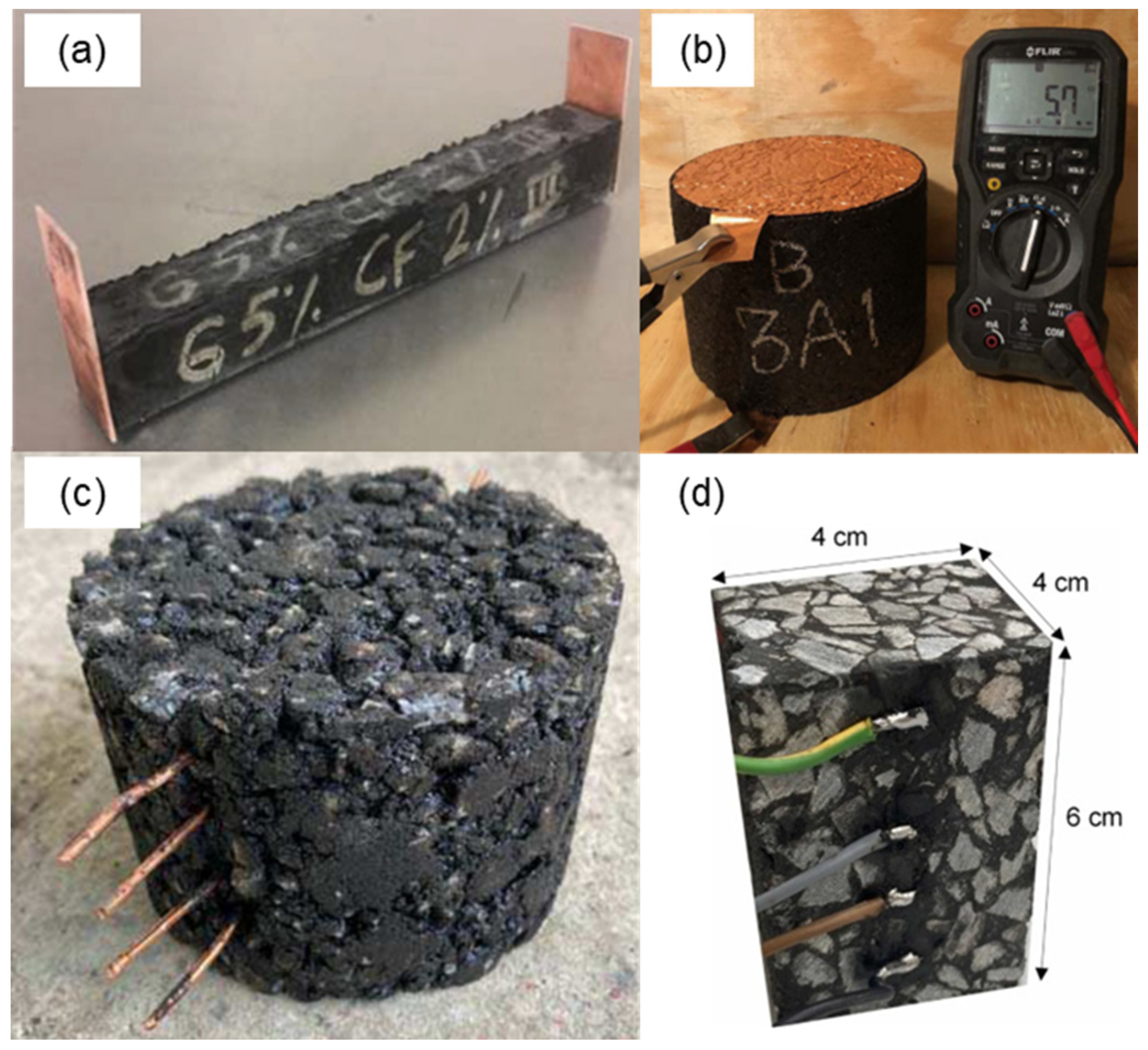
2.4. Electrical Measurements
3. Self-Sensing Mechanism and Assessment
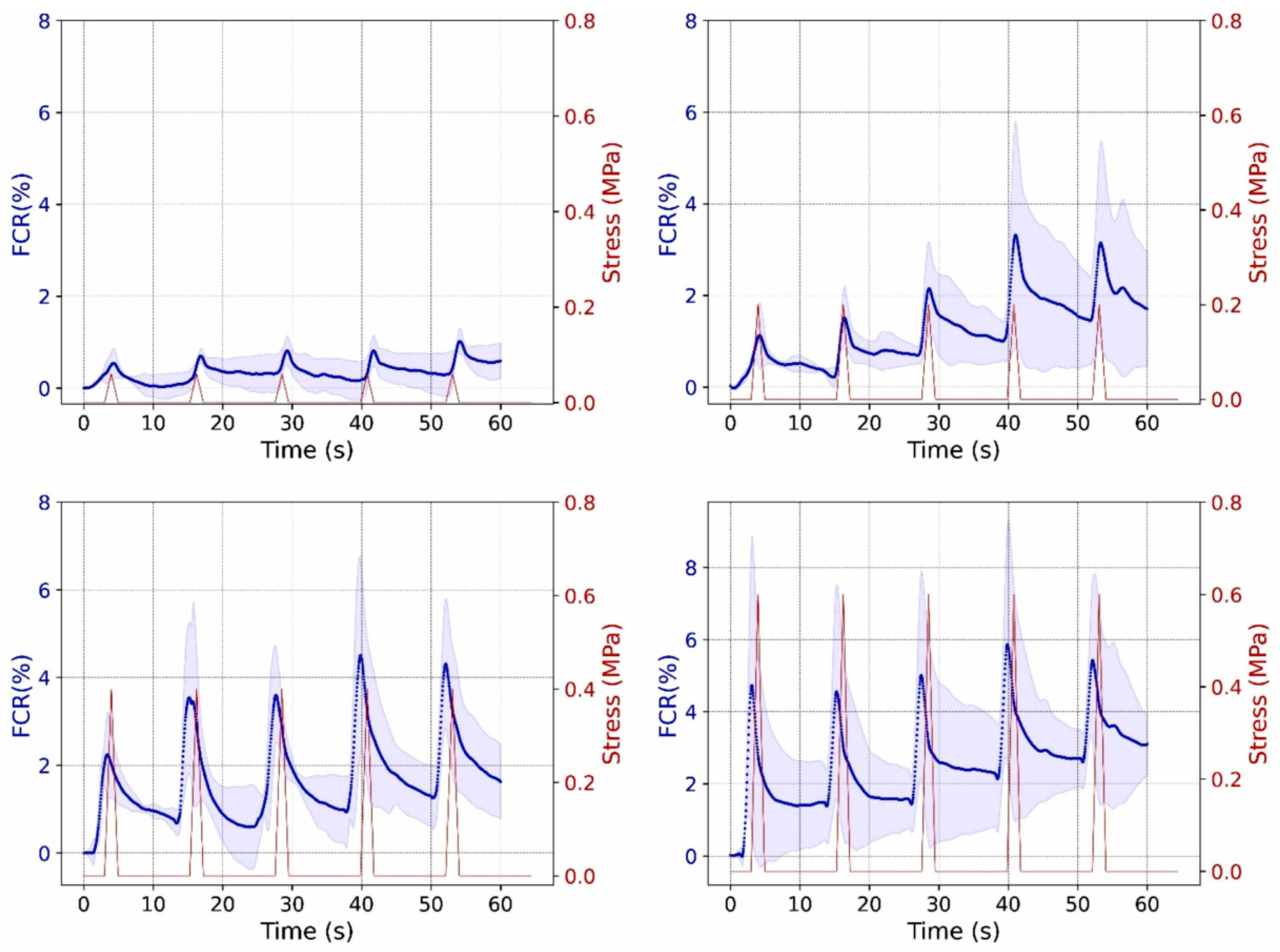
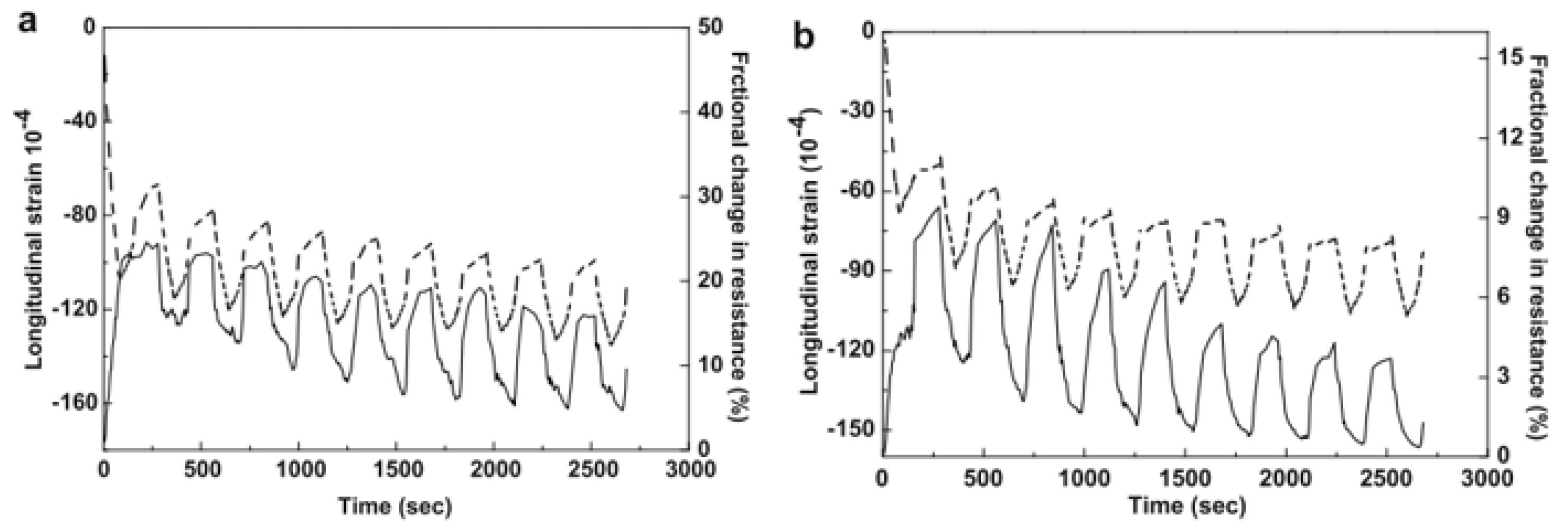
3.1. Piezoresistivity
3.2. Damage Sensing
3.3. Temperature and Moisture Sensing
4. Full-Scale Implementation
5. Current Perspectives
6. Conclusions
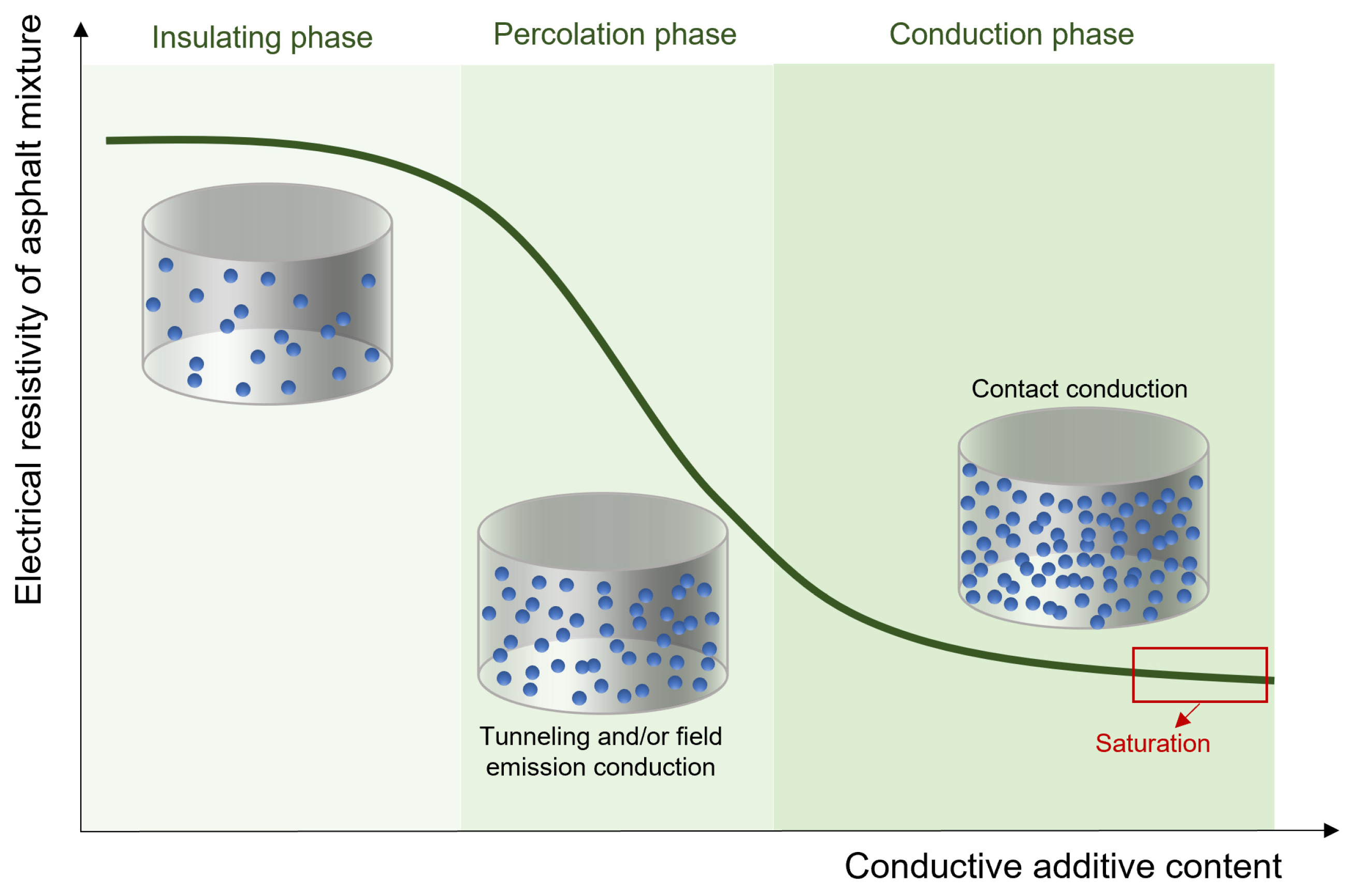
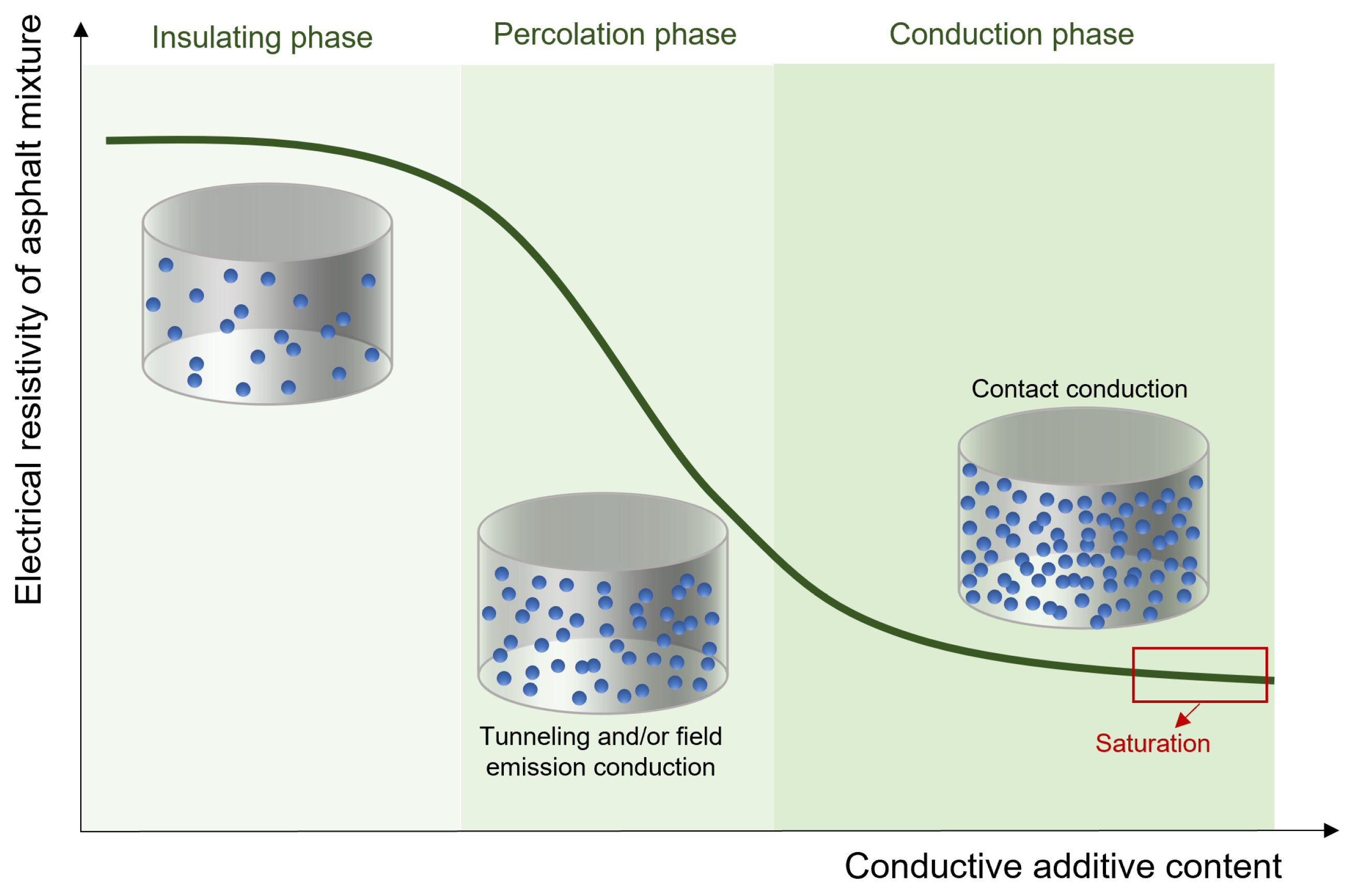
- The self-sensing mechanism is based on changes in the electrical response of an asphalt mixture when exposed to external stimuli. To enable this function, conductive additives must be properly incorporated into the asphalt mixture. Percolation analysis describes the relationship between additive content and the electrical resistivity of a mixture, representing a fundamental tool for evaluating the technical and economic feasibility of self-sensing asphalt pavements.
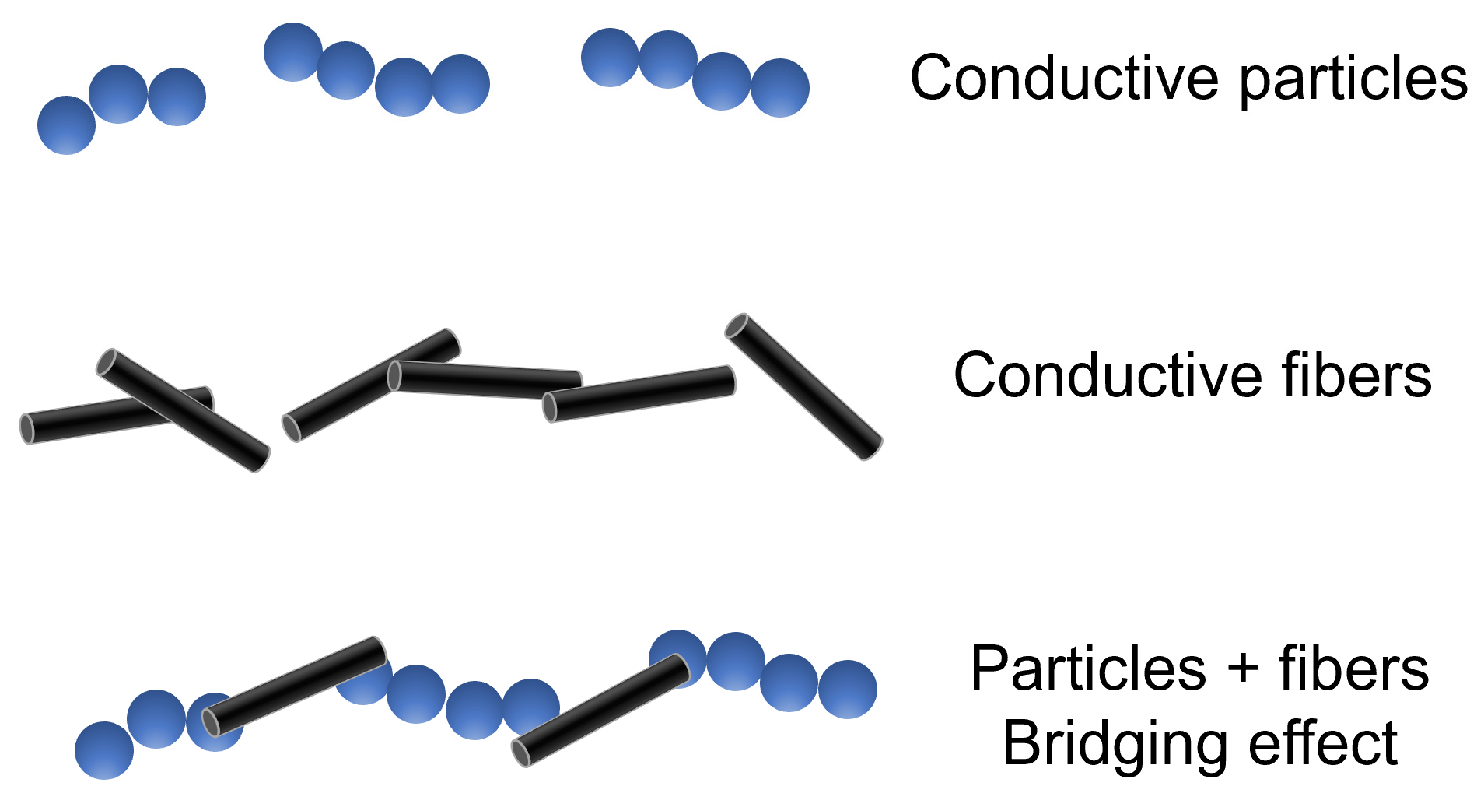
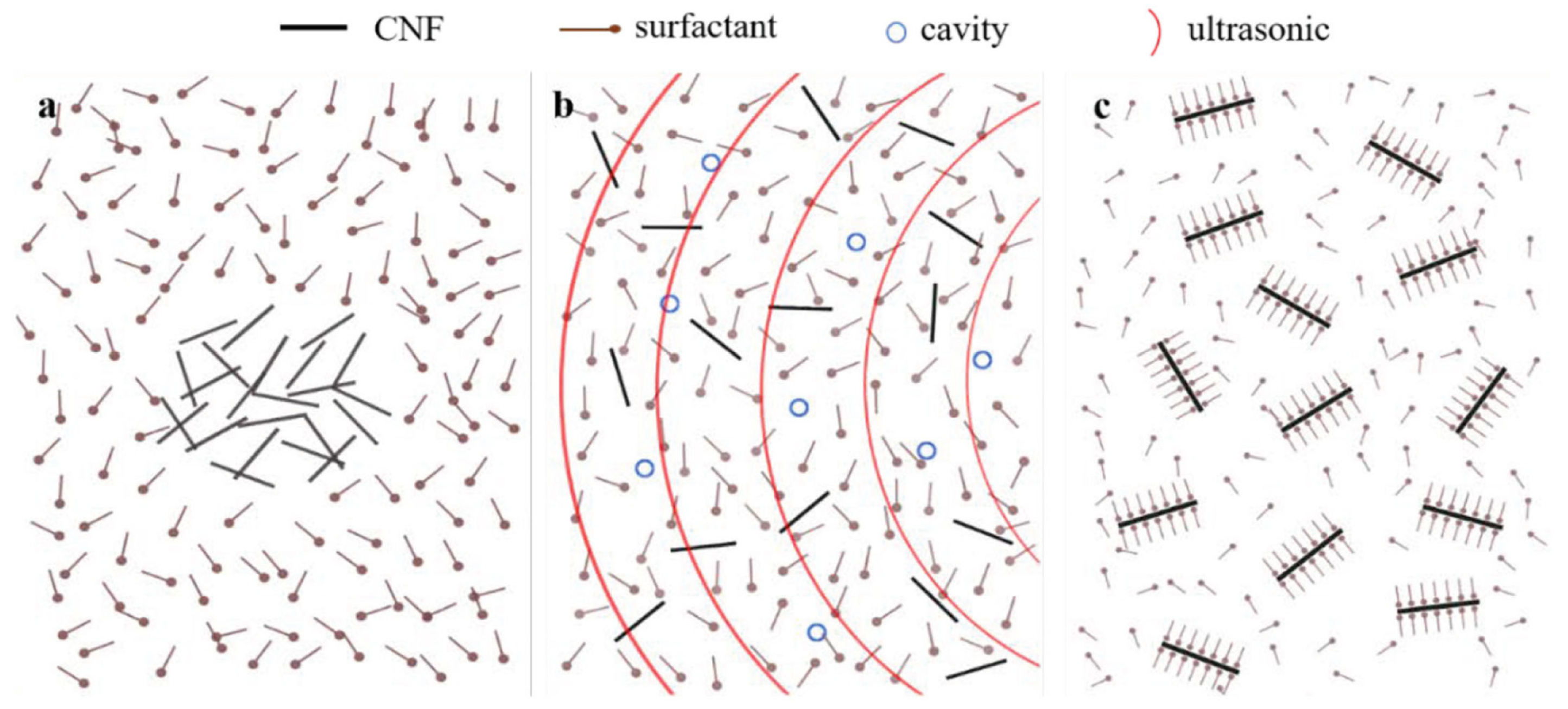
- Conductive additives used for self-sensing purposes typically include metallic or carbon-based materials, such as steel slag, steel fibers, carbon fibers, graphite, and various types of nanomaterials, like graphene, carbon nanofibers, nanotubes, and nanoplatelets. The proper dispersion of conductive additives into the asphalt mixture is crucial for developing self-sensing asphalt-based materials. The most suitable dispersion technique depends on factors such as the morphology and dimensions of the conductive additives. Although some research has been conducted on suitable dispersion techniques, their effect on the self-sensing performance remains unclear.
- While some laboratory procedures have been employed to assess the self-sensing properties of asphalt mixtures, future standardization is necessary for electrode configuration, sample fabrication, and electromechanical performance evaluation.
- The current studies have demonstrated the feasibility of incorporating strain-, damage-, and temperature-sensing functions into asphalt mixtures. However, there are still few studies in this area. Further investigations should focus on analyzing self-sensing performance under more realistic dynamic loading conditions and the influence of climatic conditions.
- Self-sensing asphalt pavements can be utilized in various applications, including those entailing weigh-in-motion, pavement health monitoring, and traffic monitoring. However, the technological maturity of this approach is still low, and additional research is required before it can be implemented on a larger scale for real-world applications. Dedicated efforts should be directed towards refining the installation procedures, developing data acquisition systems, and utilizing artificial intelligence to analyze the electrical signals generated by asphalt mixtures, thus creating valuable tools for the field of transportation engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- OECD. Asset Management for the Roads Sector; Road Transport and Intermodal Linkages Research Programme; OECD: Paris, France, 2001; ISBN 978-92-64-18697-2. [Google Scholar]
- Gagliardi, V.; Bianchini Ciampoli, L.; D’Amico, F.; Alani, A.M.; Tosti, F.; Battagliere, M.L.; Benedetto, A. Novel Perspectives in the Monitoring of Transport Infrastructures by Sentinel-1 and Cosmo-Skymed Multi-Temporal SAR Interferometry. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1891–1894. [Google Scholar]
- Bianchini Ciampoli, L.; Gagliardi, V.; Calvi, A.; D’Amico, F.; Tosti, F. Automatic network level bridge monitoring by integration of InSAR and GIS catalogues. In Proceedings of the Multimodal Sensing: Technologies and Applications, SPIE, Munich, Germany, 26–27 June 2019; Volume 11059, pp. 154–161. [Google Scholar]
- Sang, G.M.; Xu, L.; de Vrieze, P. A Predictive Maintenance Model for Flexible Manufacturing in the Context of Industry 4.0. Front. Big Data 2021, 4, 663466. [Google Scholar] [CrossRef] [PubMed]
- Barriera, M.; Pouget, S.; Lebental, B.; Van Rompu, J. In Situ Pavement Monitoring: A Review. Infrastructures 2020, 5, 18. [Google Scholar] [CrossRef]
- Di Graziano, A.; Marchetta, V.; Cafiso, S. Structural health monitoring of asphalt pavements using smart sensor networks: A comprehensive review. J. Traffic Transp. Eng. (Engl. Ed.) 2020, 7, 639–651. [Google Scholar] [CrossRef]
- Tosti, F.; Gagliardi, V.; Bianchini Ciampoli, L.; Benedetto, A.; Threader, S.; Alani, A.M. Integration of Remote Sensing and Ground-Based Non-Destructive Methods in Transport Infrastructure Monitoring: Advances, Challenges and Perspectives. In Proceedings of the 2021 IEEE Asia-Pacific Conference on Geoscience, Electronics and Remote Sensing Technology (AGERS), Jakarta, Indonesia, 29–30 September 2021; pp. 1–7. [Google Scholar]
- Manosalvas-Paredes, M.; Roberts, R.; Barriera, M.; Mantalovas, K. Towards More Sustainable Pavement Management Practices Using Embedded Sensor Technologies. Infrastructures 2020, 5, 4. [Google Scholar] [CrossRef]
- Sierra, C.; Paul, S.; Rahman, A.; Kulkarni, A. Development of a Cognitive Digital Twin for Pavement Infrastructure Health Monitoring. Infrastructures 2022, 7, 113. [Google Scholar] [CrossRef]
- Tabatabaee, N.; Sebaaly, P. State-of-the-Art Pavement Instrumentation. Transp. Res. Rec. 1990, 1260, 246–255. [Google Scholar]
- Bajwa, R.; Coleri, E.; Rajagopal, R.; Varaiya, P.; Flores, C. Pavement performance assessment using a cost-effective wireless accelerometer system. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 1009–1022. [Google Scholar] [CrossRef]
- Kara De Maeijer, P.; Luyckx, G.; Vuye, C.; Voet, E.; Van Den Bergh, W.; Vanlanduit, S.; Braspenninckx, J.; Stevens, N.; De Wolf, J. Fiber Optics Sensors in Asphalt Pavement: State-of-the-Art Review. Infrastructures 2019, 4, 36. [Google Scholar] [CrossRef]
- Xiang, P.; Wang, H. Optical fibre-based sensors for distributed strain monitoring of asphalt pavements. Int. J. Pavement Eng. 2018, 19, 842–850. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, P.; Jiang, L. Optical Fiber Sensor Based In-Field Structural Performance Monitoring of Multilayered Asphalt Pavement. J. Light. Technol. 2018, 36, 3624–3632. [Google Scholar] [CrossRef]
- Priest, A.L.; Timm, D.H. Dynamic Pavement Response Data Collection and Processing at the NCAT Test Track; National Center of Asphalt Technology (NCAT): Auburn, AL, USA, 2004. [Google Scholar]
- Wang, L.; Xue, W.; Druta, C.; Wang, D. Integration of Structural Health Monitoring and Asset Management; Department of Transportation, Research and Innovative Technology Administration: Washington, DC, USA, 2012. [Google Scholar]
- Lukanen, E. Load Testing of Instrumented Pavement Sections; Minnesota Department of Transportation: Saint Paul, MN, USA, 2005. [Google Scholar]
- Duong, N.S.; Blanc, J.; Hornych, P.; Bouveret, B.; Carroget, J.; Le Feuvre, Y. Continuous strain monitoring of an instrumented pavement section. Int. J. Pavement Eng. 2019, 20, 1435–1450. [Google Scholar] [CrossRef]
- Chapeleau, X.; Blanc, J.; Hornych, P.; Gautier, J.-L.; Carroget, J. Assessment of cracks detection in pavement by a distributed fiber optic sensing technology. J. Civ. Struct Health Monit. 2017, 7, 459–470. [Google Scholar] [CrossRef]
- Swett, L.; Mallick, R.B.; Humphrey, D.N. A study of temperature and traffic load related response in different layers in an instrumented flexible pavement. Int. J. Pavement Eng. 2008, 9, 303–316. [Google Scholar] [CrossRef]
- Boada-Parra, G.; Apaza, F.R.A.; Gulisano, F.; Medina, J.G.; Jurado-Piña, R. Characterization of interlayer bonding mechanism based on interface morphology between asphalt mix and electronics devices covers materials. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications XIV, SPIE, Amsterdam, The Netherlands, 3–7 September 2023; Volume 12734, pp. 263–272. [Google Scholar]
- Han, B.; Ding, S.; Yu, X. Intrinsic self-sensing concrete and structures: A review. Measurement 2015, 59, 110–128. [Google Scholar] [CrossRef]
- Chung, D.D.L. Piezoresistive Cement-Based Materials for Strain Sensing. J. Intell. Mater. Syst. Struct. 2002, 13, 599–609. [Google Scholar] [CrossRef]
- Dong, W.; Li, W.; Tao, Z.; Wang, K. Piezoresistive properties of cement-based sensors: Review and perspective. Constr. Build. Mater. 2019, 203, 146–163. [Google Scholar] [CrossRef]
- Song, F.; Chen, Q.; Jiang, Z.; Zhu, X.; Li, B.; He, B.; Zhu, H. Piezoresistive properties of ultra-high-performance fiber-reinforced concrete incorporating few-layer graphene. Constr. Build. Mater. 2021, 305, 124362. [Google Scholar] [CrossRef]
- Birgin, H.B.; D’Alessandro, A.; Corradini, A.; Laflamme, S.; Ubertini, F. Self-sensing asphalt composite with carbon microfibers for smart weigh-in-motion. Mater. Struct. 2022, 55, 138. [Google Scholar] [CrossRef]
- Chen, P.-W.; Chung, D.D.L. Carbon fiber reinforced concrete for smart structures capable of non-destructive flaw detection. Smart Mater. Struct. 1993, 2, 22. [Google Scholar] [CrossRef]
- Shi, Z.-Q.; Chung, D.D.L. Carbon fiber-reinforced concrete for traffic monitoring and weighing in motion. Cem. Concr. Res. 1999, 29, 435–439. [Google Scholar] [CrossRef]
- Yu, X.; Kwon, E. A carbon nanotube/cement composite with piezoresistive properties. Smart Mater. Struct. 2009, 18, 055010. [Google Scholar] [CrossRef]
- Chung, D.D.L. A critical review of piezoresistivity and its application in electrical-resistance-based strain sensing. J. Mater. Sci. 2020, 55, 15367–15396. [Google Scholar] [CrossRef]
- Abedi, M.; Fangueiro, R.; Gomes Correia, A. A review of intrinsic self-sensing cementitious composites and prospects for their application in transport infrastructures. Constr. Build. Mater. 2021, 310, 125139. [Google Scholar] [CrossRef]
- Han, J.; Pan, J.; Cai, J.; Li, X. A review on carbon-based self-sensing cementitious composites. Constr. Build. Mater. 2020, 265, 120764. [Google Scholar] [CrossRef]
- Wang, T.; Faßbender, S.; Dong, W.; Schulze, C.; Oeser, M.; Liu, P. Sensitive surface layer: A review on conductive and piezoresistive pavement materials with carbon-based additives. Constr. Build. Mater. 2023, 387, 131611. [Google Scholar] [CrossRef]
- Shao-peng, W.; Lian-tong, M.; Zhong-he, S.; Dong-xing, X.; Yong-jie, X.; Wen-feng, Y. An improvement in electrical properties of asphalt concrete. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2002, 17, 69–72. [Google Scholar] [CrossRef]
- Wu, S.; Mo, L.; Shui, Z.; Chen, Z. Investigation of the conductivity of asphalt concrete containing conductive fillers. Carbon 2005, 43, 1358–1363. [Google Scholar] [CrossRef]
- Lu, D.; Jiang, X.; Leng, Z.; Huo, Y.; Wang, D.; Zhong, J. Electrically conductive asphalt concrete for smart and sustainable pavement construction: A review. Constr. Build. Mater. 2023, 406, 133433. [Google Scholar] [CrossRef]
- Fang, C.; Zhang, J.; Chen, X.; Weng, G.J. Calculating the Electrical Conductivity of Graphene Nanoplatelet Polymer Composites by a Monte Carlo Method. Nanomaterials 2020, 10, 1129. [Google Scholar] [CrossRef]
- Wang, Y.-Y.; Tan, Y.-Q.; Liu, K.; Xu, H.-N. Preparation and electrical properties of conductive asphalt concretes containing graphene and carbon fibers. Constr. Build. Mater. 2022, 318, 125875. [Google Scholar] [CrossRef]
- Han, B.; Yu, X.; Ou, J. Chapter 6—Sensing Mechanisms of Self-Sensing Concrete. In Self-Sensing Concrete in Smart Structures; Butterworth-Heinemann: Oxford, UK, 2014; pp. 163–187. ISBN 978-0-12-800517-0. [Google Scholar]
- Han, B.; Yu, X.; Ou, J. Effect of water content on the piezoresistivity of MWNT/cement composites. J. Mater. Sci. 2010, 45, 3714–3719. [Google Scholar] [CrossRef]
- Arabzadeh, A.; Ceylan, H.; Kim, S.; Sassani, A.; Gopalakrishnan, K.; Mina, M. Electrically-conductive asphalt mastic: Temperature dependence and heating efficiency. Mater. Des. 2018, 157, 303–313. [Google Scholar] [CrossRef]
- Liantong, M.; Shaopeng, W.; Xiaoming, L.; Zheng, C. Percolation model of graphite-modified asphalt concrete. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2005, 20, 111–113. [Google Scholar] [CrossRef]
- García, Á.; Schlangen, E.; van de Ven, M.; Liu, Q. Electrical conductivity of asphalt mortar containing conductive fibers and fillers. Constr. Build. Mater. 2009, 23, 3175–3181. [Google Scholar] [CrossRef]
- Ding, S.; Dong, S.; Ashour, A.; Han, B. Development of sensing concrete: Principles, properties and its applications. J. Appl. Phys. 2019, 126, 241101. [Google Scholar] [CrossRef]
- Liu, X.; Wu, S.; Ye, Q.; Qiu, J.; Li, B. Properties evaluation of asphalt-based composites with graphite and mine powders. Constr. Build. Mater. 2008, 22, 121–126. [Google Scholar] [CrossRef]
- Wang, H.; Yang, J.; Liao, H.; Chen, X. Electrical and mechanical properties of asphalt concrete containing conductive fibers and fillers. Constr. Build. Mater. 2016, 122, 184–190. [Google Scholar] [CrossRef]
- Hosseinian, S.M.; Najafi Moghaddam Gilani, V.; Mehraban Joobani, P.; Arabani, M. Investigation of Moisture Sensitivity and Conductivity Properties of Inductive Asphalt Mixtures Containing Steel Wool Fiber. Adv. Civ. Eng. 2020, 2020, e8890814. [Google Scholar] [CrossRef]
- Dong, S.; Zhang, W.; D’Alessandro, A.; Han, B. Developing highly conductive asphalt concrete by incorporating stainless steel fibers/wires for smart pavement. J. Mater. Sci. 2023, 58, 11062–11084. [Google Scholar] [CrossRef]
- Rizvi, H.R.; Khattak, M.J.; Madani, M.; Khattab, A. Piezoresistive response of conductive Hot Mix Asphalt mixtures modified with carbon nanofibers. Constr. Build. Mater. 2016, 106, 618–631. [Google Scholar] [CrossRef]
- Gulisano, F.; Crucho, J.; Gallego, J.; Picado-Santos, L. Microwave Healing Performance of Asphalt Mixture Containing Electric Arc Furnace (EAF) Slag and Graphene Nanoplatelets (GNPs). Appl. Sci. 2020, 10, 1428. [Google Scholar] [CrossRef]
- Wu, S.; Zhao, Z.; Li, Y.; Pang, L.; Amirkhanian, S.; Riara, M. Evaluation of Aging Resistance of Graphene Oxide Modified Asphalt. Appl. Sci. 2017, 7, 702. [Google Scholar] [CrossRef]
- Wu, S.; Pan, P.; Chen, M.; Zhang, Y. Analysis of Characteristics of Electrically Conductive Asphalt Concrete Prepared by Multiplex Conductive Materials. J. Mater. Civ. Eng. 2013, 25, 871–879. [Google Scholar] [CrossRef]
- Khattak, M.J.; Khattab, A.; Rizvi, H.R.; Zhang, P. The impact of carbon nano-fiber modification on asphalt binder rheology. Constr. Build. Mater. 2012, 30, 257–264. [Google Scholar] [CrossRef]
- Gong, M.; Yang, J.; Yao, H.; Wang, M.; Niu, X.; Haddock, J.E. Investigating the performance, chemical, and microstructure properties of carbon nanotube-modified asphalt binder. Road Mater. Pavement Des. 2018, 19, 1499–1522. [Google Scholar] [CrossRef]
- Liu, X.; Wu, S.; Li, N.; Gao, B. Self-monitoring application of asphalt concrete containing graphite and carbon fibers. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2008, 23, 268–271. [Google Scholar] [CrossRef]
- Wu, S.; Liu, X.; Ye, Q.; Li, N. Self-monitoring electrically conductive asphalt-based composite containing carbon fillers. Trans. Nonferrous Met. Soc. China 2006, 16, s512–s516. [Google Scholar] [CrossRef]
- Li, C.; Ge, H.; Sun, D.; Zhou, X. Novel conductive wearing course using a graphite, carbon fiber, and epoxy resin mixture for active de-icing of asphalt concrete pavement. Mater. Struct. 2021, 54, 48. [Google Scholar] [CrossRef]
- Huang, B.; Chen, X.; Shu, X. Effects of Electrically Conductive Additives on Laboratory-Measured Properties of Asphalt Mixtures. J. Mater. Civ. Eng. 2009, 21, 612–617. [Google Scholar] [CrossRef]
- Rew, Y.; Baranikumar, A.; Tamashausky, A.V.; El-Tawil, S.; Park, P. Electrical and mechanical properties of asphaltic composites containing carbon based fillers. Constr. Build. Mater. 2017, 135, 394–404. [Google Scholar] [CrossRef]
- Sun, W.; Li, X.; Yang, Q.; Zhang, H. Resistivity-temperature characteristics of conductive asphalt concrete. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2016, 31, 367–371. [Google Scholar] [CrossRef]
- Hafeez, M.; Ahmad, N.; Kamal, M.A.; Rafi, J.; Haq, M.F.U.; Jamal; Zaidi, S.B.A.; Nasir, M.A. Experimental Investigation into the Structural and Functional Performance of Graphene Nano-Platelet (GNP)-Doped Asphalt. Appl. Sci. 2019, 9, 686. [Google Scholar] [CrossRef]
- Liu, X.; An, Y.; Feng, J.; Zhu, X.; Li, F. Preparation and Properties of Carbon Nanofiber Modified Emulsified Asphalt Based on Ultrasonication and Surfactant and the Impact of SBR and NH4Cl. Front. Mater. 2020, 7, 209. [Google Scholar] [CrossRef]
- Khattak, M.J.; Khattab, A.; Zhang, P.; Rizvi, H.R.; Pesacreta, T. Microstructure and fracture morphology of carbon nano-fiber modified asphalt and hot mix asphalt mixtures. Mater. Struct. 2013, 46, 2045–2057. [Google Scholar] [CrossRef]
- Notani, M.A.; Arabzadeh, A.; Ceylan, H.; Kim, S.; Gopalakrishnan, K. Effect of Carbon-Fiber Properties on Volumetrics and Ohmic Heating of Electrically Conductive Asphalt Concrete. J. Mater. Civ. Eng. 2019, 31, 04019200. [Google Scholar] [CrossRef]
- Ullah, S.; Wan, S.; Yang, C.; Ma, X.; Dong, Z. Self-stress and deformation sensing of electrically conductive asphalt concrete incorporating carbon fiber and iron tailings. Struct. Control Health Monit. 2022, 29, e2998. [Google Scholar] [CrossRef]
- Xin, X.; Liang, M.; Yao, Z.; Su, L.; Zhang, J.; Li, P.; Sun, C.; Jiang, H. Self-sensing behavior and mechanical properties of carbon nanotubes/epoxy resin composite for asphalt pavement strain monitoring. Constr. Build. Mater. 2020, 257, 119404. [Google Scholar] [CrossRef]
- Gulisano, F.; Buasiri, T.; Apaza, F.R.A.; Cwirzen, A.; Gallego, J. Piezoresistive behavior of electric arc furnace slag and graphene nanoplatelets asphalt mixtures for self-sensing pavements. Autom. Constr. 2022, 142, 104534. [Google Scholar] [CrossRef]
- Norambuena-Contreras, J.; Serpell, R.; Valdés Vidal, G.; González, A.; Schlangen, E. Effect of fibres addition on the physical and mechanical properties of asphalt mixtures with crack-healing purposes by microwave radiation. Constr. Build. Mater. 2016, 127, 369–382. [Google Scholar] [CrossRef]
- Phan, T.M.; Park, D.-W.; Le, T.H.M. Crack healing performance of hot mix asphalt containing steel slag by microwaves heating. Constr. Build. Mater. 2018, 180, 503–511. [Google Scholar] [CrossRef]
- Karimi, M.M.; Darabi, M.K.; Jahanbakhsh, H.; Jahangiri, B.; Rushing, J.F. Effect of steel wool fibers on mechanical and induction heating response of conductive asphalt concrete. Int. J. Pavement Eng. 2020, 21, 1755–1768. [Google Scholar] [CrossRef]
- Yu, X.; Zadshir, M.; Yan, J.R.; Yin, H. Morphological, Thermal, and Mechanical Properties of Asphalt Binders Modified by Graphene and Carbon Nanotube. J. Mater. Civ. Eng. 2022, 34, 04022047. [Google Scholar] [CrossRef]
- Faramarzi, M.; Arabani, M.; Haghi, A.K.; Mottaghitalab, V. Carbon Nanotubes-modified Asphalt Binder: Preparation and Characterization. Int. J. Pavement Res. Technol. 2015, 8, 29–37. [Google Scholar] [CrossRef]
- Li, X.; Wang, Y.-M.; Wu, Y.-L.; Wang, H.-R.; Chen, M.; Sun, H.-D.; Fan, L. Properties and modification mechanism of asphalt with graphene as modifier. Constr. Build. Mater. 2021, 272, 121919. [Google Scholar] [CrossRef]
- Santagata, E.; Baglieri, O.; Tsantilis, L.; Dalmazzo, D. Rheological Characterization of Bituminous Binders Modified with Carbon Nanotubes. Procedia—Soc. Behav. Sci. 2012, 53, 546–555. [Google Scholar] [CrossRef]
- Li, R.; Xiao, F.; Amirkhanian, S.; You, Z.; Huang, J. Developments of nano materials and technologies on asphalt materials—A review. Constr. Build. Mater. 2017, 143, 633–648. [Google Scholar] [CrossRef]
- Haq, M.F.U.; Ahmad, N.; Nasir, M.A.; Jamal; Hafeez, M.; Rafi, J.; Zaidi, S.B.A.; Haroon, W. Carbon Nanotubes (CNTs) in Asphalt Binder: Homogeneous Dispersion and Performance Enhancement. Appl. Sci. 2018, 8, 2651. [Google Scholar] [CrossRef]
- Abedi, M.; Fangueiro, R.; Correia, A.G. An Effective Method for Hybrid CNT/GNP Dispersion and Its Effects on the Mechanical, Microstructural, Thermal, and Electrical Properties of Multifunctional Cementitious Composites. J. Nanomater. 2020, 2020, e6749150. [Google Scholar] [CrossRef]
- Chung, D.D. Dispersion of Short Fibers in Cement. J. Mater. Civ. Eng. 2005, 17, 379–383. [Google Scholar] [CrossRef]
- Santagata, E.; Baglieri, O.; Tsantilis, L.; Chiappinelli, G.; Brignone Aimonetto, I. Effect of sonication on high temperature properties of bituminous binders reinforced with nano-additives. Constr. Build. Mater. 2015, 75, 395–403. [Google Scholar] [CrossRef]
- Zeng, Q.; Liu, Y.; Liu, Q.; Liu, P.; He, Y.; Zeng, Y. Preparation and modification mechanism analysis of graphene oxide modified asphalts. Constr. Build. Mater. 2020, 238, 117706. [Google Scholar] [CrossRef]
- Adnan, A.M.; Luo, X.; Lü, C.; Wang, J.; Huang, Z. Improving mechanics behavior of hot mix asphalt using graphene-oxide. Constr. Build. Mater. 2020, 254, 119261. [Google Scholar] [CrossRef]
- Le, J.-L.; Marasteanu, M.O.; Turos, M. Mechanical and compaction properties of graphite nanoplatelet-modified asphalt binders and mixtures. Road Mater. Pavement Des. 2020, 21, 1799–1814. [Google Scholar] [CrossRef]
- Ahmad Nazki, M.; Chopra, T.; Chandrappa, A.K. Rheological properties and thermal conductivity of bitumen binders modified with graphene. Constr. Build. Mater. 2020, 238, 117693. [Google Scholar] [CrossRef]
- Jamal Khattak, M.; Khattab, A.; Rizvi, H.R. Characterization of carbon nano-fiber modified hot mix asphalt mixtures. Constr. Build. Mater. 2013, 40, 738–745. [Google Scholar] [CrossRef]
- Norambuena-Contreras, J.; Gonzalez, A.; Concha, J.L.; Gonzalez-Torre, I.; Schlangen, E. Effect of metallic waste addition on the electrical, thermophysical and microwave crack-healing properties of asphalt mixtures. Constr. Build. Mater. 2018, 187, 1039–1050. [Google Scholar] [CrossRef]
- Chung, D.D.L. Pitfalls in Piezoresistivity Testing. J. Electron. Mater. 2022, 51, 5473–5481. [Google Scholar] [CrossRef]
- Wen, S.; Chung, D.D.L. Electric polarization in carbon fiber-reinforced cement. Cem. Concr. Res. 2001, 31, 141–147. [Google Scholar] [CrossRef]
- Cosoli, G.; Mobili, A.; Tittarelli, F.; Revel, G.; Chiariotti, P. Electrical Resistivity and Electrical Impedance Measurement in Mortar and Concrete Elements: A Systematic Review. Appl. Sci. 2020, 10, 9152. [Google Scholar] [CrossRef]
- Han, B.; Guan, X.; Ou, J. Electrode design, measuring method and data acquisition system of carbon fiber cement paste piezoresistive sensors. Sens. Actuators A Phys. 2007, 135, 360–369. [Google Scholar] [CrossRef]
- Gulisano, F.; Buasiri, T.; Cwirzen, A.; Gallego, J. Monitoring Road Infrastructures with Self-sensing Asphalt Pavements. In Proceedings of the European Workshop on Structural Health Monitoring; Rizzo, P., Milazzo, A., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 784–793. [Google Scholar]
- Gulisano, F.; Abedi, M.; Jurado-Piña, R.; Apaza, F.R.A.; Roshan, M.J.; Fangueiro, R.; Correia, A.G.; Gallego, J. Stress and damage-sensing capabilities of asphalt mixtures incorporating graphene nanoplatelets. Sens. Actuators A Phys. 2023, 359, 114494. [Google Scholar] [CrossRef]
- Han, B.; Yu, X.; Ou, J. Self-Sensing Concrete in Smart Structures; Butterworth-Heinemann: Oxford, UK, 2014. [Google Scholar]
- Han, B.; Zhang, K.; Yu, X.; Kwon, E.; Ou, J. Electrical characteristics and pressure-sensitive response measurements of carboxyl MWNT/cement composites. Cem. Concr. Compos. 2012, 34, 794–800. [Google Scholar] [CrossRef]
- Han, B.; Zhang, L.; Ou, J. Self-Sensing Concrete. In Smart and Multifunctional Concrete Toward Sustainable Infrastructures; Springer: Singapore, 2017; pp. 81–116. ISBN 978-981-10-4349-9. [Google Scholar]
- Fiorillo, A.S.; Critello, C.D.; Pullano, S.A. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Gonçalves, B.F.; Oliveira, J.; Costa, P.; Correia, V.; Martins, P.; Botelho, G.; Lanceros-Mendez, S. Development of water-based printable piezoresistive sensors for large strain applications. Compos. Part B Eng. 2017, 112, 344–352. [Google Scholar] [CrossRef]
- Costa, P.; Silva, J.; Ansón-Casaos, A.; Martinez, M.T.; Abad, M.J.; Viana, J.; Lanceros-Mendez, S. Effect of carbon nanotube type and functionalization on the electrical, thermal, mechanical and electromechanical properties of carbon nanotube/styrene–butadiene–styrene composites for large strain sensor applications. Compos. Part B Eng. 2014, 61, 136–146. [Google Scholar] [CrossRef]
- Wu, S.; Mo, L.T.; Shui, Z.H. Piezoresistivity of Graphite Modified Asphalt-Based Composites. Key Eng. Mater. 2003, 249, 391–396. [Google Scholar] [CrossRef]
- Liu, X.; Wu, S. Research on the conductive asphalt concrete’s piezoresistivity effect and its mechanism. Constr. Build. Mater. 2009, 23, 2752–2756. [Google Scholar] [CrossRef]
- Gulisano, F.; Apaza, F.R.A.; Gálvez-Pérez, D.; Jurado-Piña, R.; Boada-Parra, G.; Gallego, J. Non-destructive testing methods for road pavement health monitoring: Electromechanical assessment of self-sensing asphalt materials. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications XIV, SPIE, Amsterdam, The Netherlands, 3–7 September 2023; Volume 12734, pp. 241–250. [Google Scholar]
- Liu, X.; Wu, S. Study on the graphite and carbon fiber modified asphalt concrete. Constr. Build. Mater. 2011, 25, 1807–1811. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, X.; Xu, L.; Zhang, H.; Liu, Z. Investigation on the piezoresistive response of carbon fiber-graphite modified asphalt mixtures. Constr. Build. Mater. 2021, 301, 124140. [Google Scholar] [CrossRef]
- Dinh, T.; Phan, H.-P.; Qamar, A.; Woodfield, P.; Nguyen, N.-T.; Dao, D.V. Thermoresistive Effect for Advanced Thermal Sensors: Fundamentals, Design Considerations, and Applications. J. Microelectromech. Syst. 2017, 26, 966–986. [Google Scholar] [CrossRef]
- Wen, S.; Chung, D.D.L. Carbon fiber-reinforced cement as a thermistor. Cem. Concr. Res. 1999, 29, 961–965. [Google Scholar] [CrossRef]
- Jović, N.; Dudić, D.; Montone, A.; Antisari, M.V.; Mitrić, M.; Djoković, V. Temperature dependence of the electrical conductivity of epoxy/expanded graphite nanosheet composites. Scr. Mater. 2008, 58, 846–849. [Google Scholar] [CrossRef]
- Khan, T.; Irfan, M.S.; Ali, M.; Dong, Y.; Ramakrishna, S.; Umer, R. Insights to low electrical percolation thresholds of carbon-based polypropylene nanocomposites. Carbon 2021, 176, 602–631. [Google Scholar] [CrossRef]
- Bing, C.; Keru, W.; Wu, Y. Characteristics of resistivity-temperature for carbon fiber reinforced concrete. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2006, 21, 121–124. [Google Scholar] [CrossRef]
- Zhou, X.; Moghaddam, T.B.; Chen, M.; Wu, S.; Adhikari, S.; Wang, F.; Fan, Z. Nano-scale analysis of moisture diffusion in asphalt-aggregate interface using molecular simulations. Constr. Build. Mater. 2021, 285, 122962. [Google Scholar] [CrossRef]
- Bianchini Ciampoli, L.; Artagan, S.S.; Tosti, F.; Gagliardi, V.; Alani, A.M.; Benedetto, A. A comparative investigation of the effects of concrete sleepers on the GPR signal for the assessment of railway ballast. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Li, C.; Miao, L.; Yue, J. Research on Detection to Moisture Content of Flexible Pavement by GPR. In Paving Materials and Pavement Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 420–426. [Google Scholar] [CrossRef]
- Cao, Q.; Al-Qadi, I.L. Effect of Moisture Content on Calculated Dielectric Properties of Asphalt Concrete Pavements from Ground-Penetrating Radar Measurements. Remote Sens. 2022, 14, 34. [Google Scholar] [CrossRef]
- Buasiri, T.; Habermehl-Cwirzen, K.; Krzeminski, L.; Cwirzen, A. Novel humidity sensors based on nanomodified Portland cement. Sci. Rep. 2021, 11, 8189. [Google Scholar] [CrossRef] [PubMed]
- Birgin, H.B.; D’Alessandro, A.; Favaro, M.; Sangiorgi, C.; Laflamme, S.; Ubertini, F. Field investigation of novel self-sensing asphalt pavement for weigh-in-motion sensing. Smart Mater. Struct. 2022, 31, 085004. [Google Scholar] [CrossRef]
- Tian, Z.; Li, Y.; Zheng, J.; Wang, S. A state-of-the-art on self-sensing concrete: Materials, fabrication and properties. Compos. Part B Eng. 2019, 177, 107437. [Google Scholar] [CrossRef]
- Han, B.; Zhang, K.; Yu, X.; Kwon, E.; Ou, J. Nickel particle-based self-sensing pavement for vehicle detection. Measurement 2011, 44, 1645–1650. [Google Scholar] [CrossRef]
- Birgin, H.B.; García-Macías, E.; D’Alessandro, A.; Ubertini, F. Self-powered weigh-in-motion system combining vibration energy harvesting and self-sensing composite pavements. Constr. Build. Mater. 2023, 369, 130538. [Google Scholar] [CrossRef]
- Han, B.; Yu, X.; Kwon, E. A self-sensing carbon nanotube/cement composite for traffic monitoring. Nanotechnology 2009, 20, 445501. [Google Scholar] [CrossRef]
- Pimentel, E.; Costa, P.; Tubio, C.R.; Vilaça, J.L.; Costa, C.M.; Lanceros-Méndez, S.; Miranda, D. Printable piezoresistive polymer composites for self-sensing medical catheter device applications. Compos. Sci. Technol. 2023, 239, 110071. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Z.; Zhang, B.; Chen, T.; Linghu, C.; Wu, K.; Wang, G.; Wang, H.; Wang, Y. Self-Sensing Robotic Structures from Architectured Particle Assemblies. Adv. Intell. Syst. 2023, 5, 2200250. [Google Scholar] [CrossRef]
- Selleri, G.; Mongioì, F.; Maccaferri, E.; D’Anniballe, R.; Mazzocchetti, L.; Carloni, R.; Fabiani, D.; Zucchelli, A.; Brugo, T.M. Self-Sensing Soft Skin Based on Piezoelectric Nanofibers. Polymers 2023, 15, 280. [Google Scholar] [CrossRef]
- Vertuccio, L.; Spinelli, G.; Lamberti, P.; Tucci, V.; Zarrelli, M.; Russo, S.; Iannuzzo, G.; Guadagno, L. Self-sensing nanocomposites in automotive/aeronautic field. Mater. Today Proc. 2021, 34, 125–127. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Origin | Morphology | Additive | Electrical Resistivity (Ω·m) | Percolation Threshold (% vol of Binder) | References |
|---|---|---|---|---|---|
| Carbonaceous | Filler | Graphite powder (GP) | 10−6–5 × 10−4 | 11–17 | [35,41,42,46,52,55,56,57,58,59] |
| Carbon black (CB) | 10−4–8 × 10−2 | 16 | [35,60] | ||
| Graphene nanoplatelets (GNPs) | 1.25 × 10−5 | - | [50,61] | ||
| Fiber | Carbon fibers (CFs) | 10−5–10−3 | 5–14 | [52,62,63,64,65] | |
| Carbon nanofibers (CNFs) | - | - | [49,62] | ||
| Carbon nanotubes/Multi-walled nanotubes (CNTs/MWCNTs) | 8 × 10−6 | - | [66] | ||
| Metallic | Filler | Steel slag (SS) | - | - | [50,52] |
| Fiber | Steel fibers (SF) | 7 × 10−9–7 × 10−7 | 3–6 | [43,46,52,58] |
| Dispersion Technique | Nanomaterial | Procedure | References |
|---|---|---|---|
| Dry | CNTs | CNTs were added and manually blended in the bitumen; then, the bitumen–CNT blends were mixed with a mechanical stirrer (1550 rpm for 40 min at 160 °C) | [74] |
| GO | High-shear mixing: 4000 rpm for 30–45 min | [51,80,81] | |
| CNTs | High-shear mixing: 5000 rpm for 30 min | [54] | |
| GNPs | A glass rod was used to mix GNPs into a binder for 10 min at 150–160 °C | [61,82] | |
| GNPs | High-shear mixing: 1720 rpm for 1 h at a temperature of 140 °C. | [83] | |
| Wet | CNFs | Solvent: kerosene Sonication time and program: three cycles of 8 min each with an idle (cool-down) time of 25 min between cycles Mixing time: 30 min (120–160 °C), followed by 150 min at 160 °C using low-speed shear mixer. | [53,84] |
| CNTs | Sonication time: 60 min High-shear mixing: 1550 rpm for a total time of 90 min at a temperature of 150 °C | [79] | |
| CNTs | Solvent: methanol Sonication time: 2 h High-shear mixing: 3000 rpm for 45 min (158 ± 5 °C) to ensure the evaporation of methanol | [76] | |
| GNPs-CNTs | Solvent: deionized water Surfactant: Stock US4498 Sonication time: 30 min | [71] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulisano, F.; Jimenez-Bermejo, D.; Castano-Solís, S.; Sánchez Diez, L.A.; Gallego, J. Development of Self-Sensing Asphalt Pavements: Review and Perspectives. Sensors 2024, 24, 792. https://doi.org/10.3390/s24030792
Gulisano F, Jimenez-Bermejo D, Castano-Solís S, Sánchez Diez LA, Gallego J. Development of Self-Sensing Asphalt Pavements: Review and Perspectives. Sensors. 2024; 24(3):792. https://doi.org/10.3390/s24030792
Chicago/Turabian StyleGulisano, Federico, David Jimenez-Bermejo, Sandra Castano-Solís, Luis Alberto Sánchez Diez, and Juan Gallego. 2024. "Development of Self-Sensing Asphalt Pavements: Review and Perspectives" Sensors 24, no. 3: 792. https://doi.org/10.3390/s24030792
APA StyleGulisano, F., Jimenez-Bermejo, D., Castano-Solís, S., Sánchez Diez, L. A., & Gallego, J. (2024). Development of Self-Sensing Asphalt Pavements: Review and Perspectives. Sensors, 24(3), 792. https://doi.org/10.3390/s24030792