
Estimation of Gait Parameters for Adults with Surface Electromyogram Based on Machine Learning Models

 ,
, 

 and
and
Abstract
1. Introduction
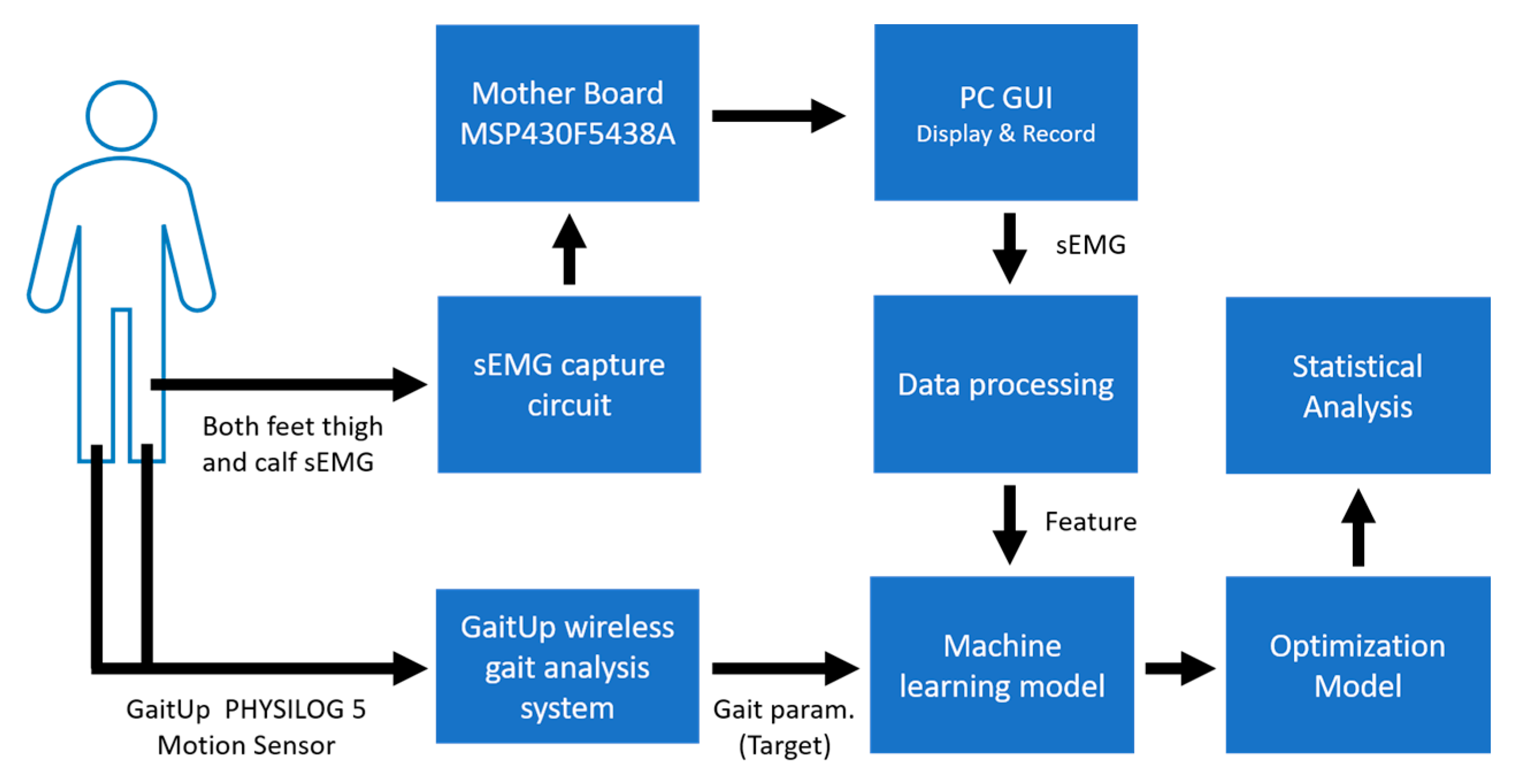
2. Materials and Methods
2.1. Data Measurement Devices
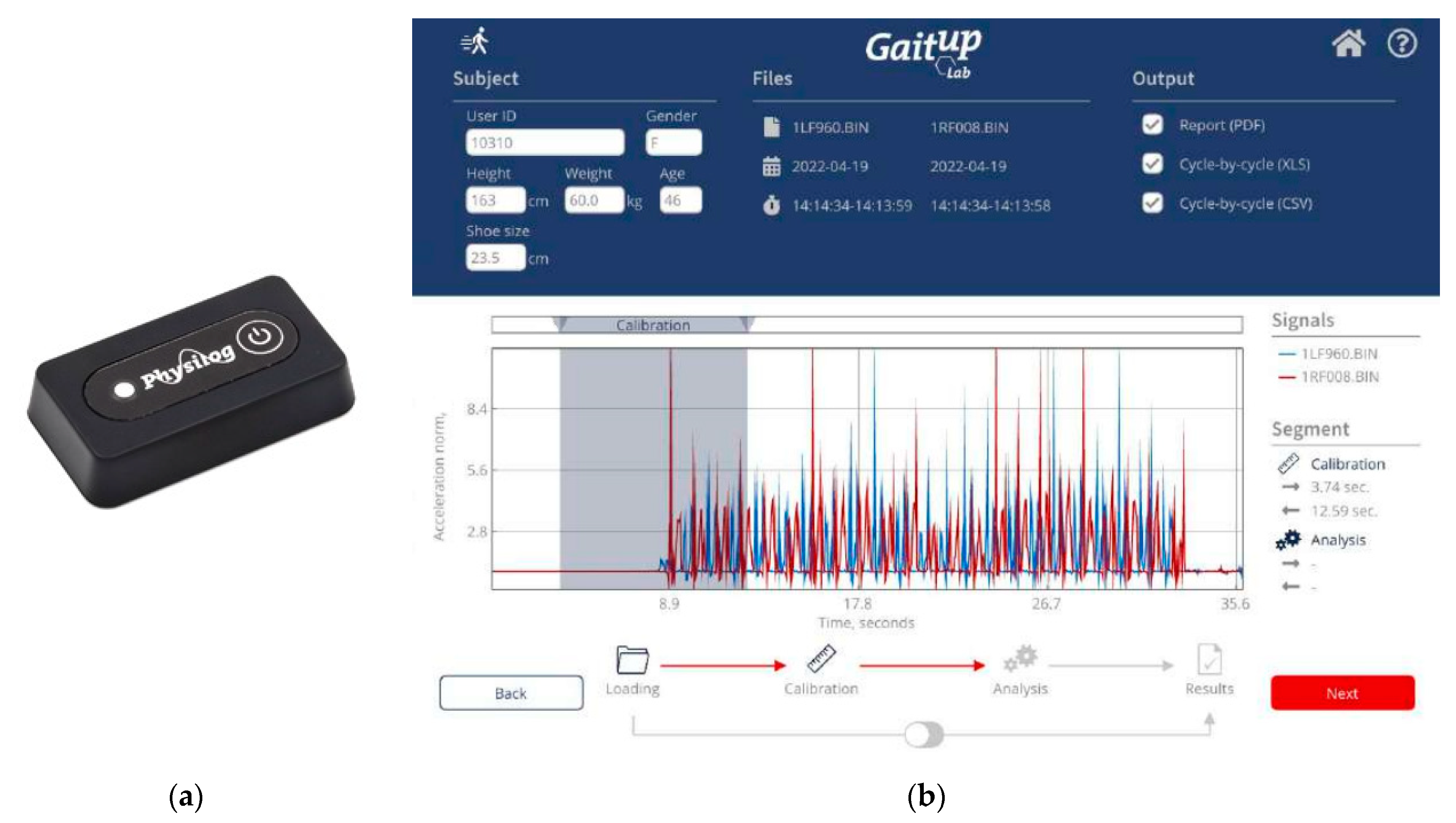
2.1.1. GaitUp Physilog® 5 System
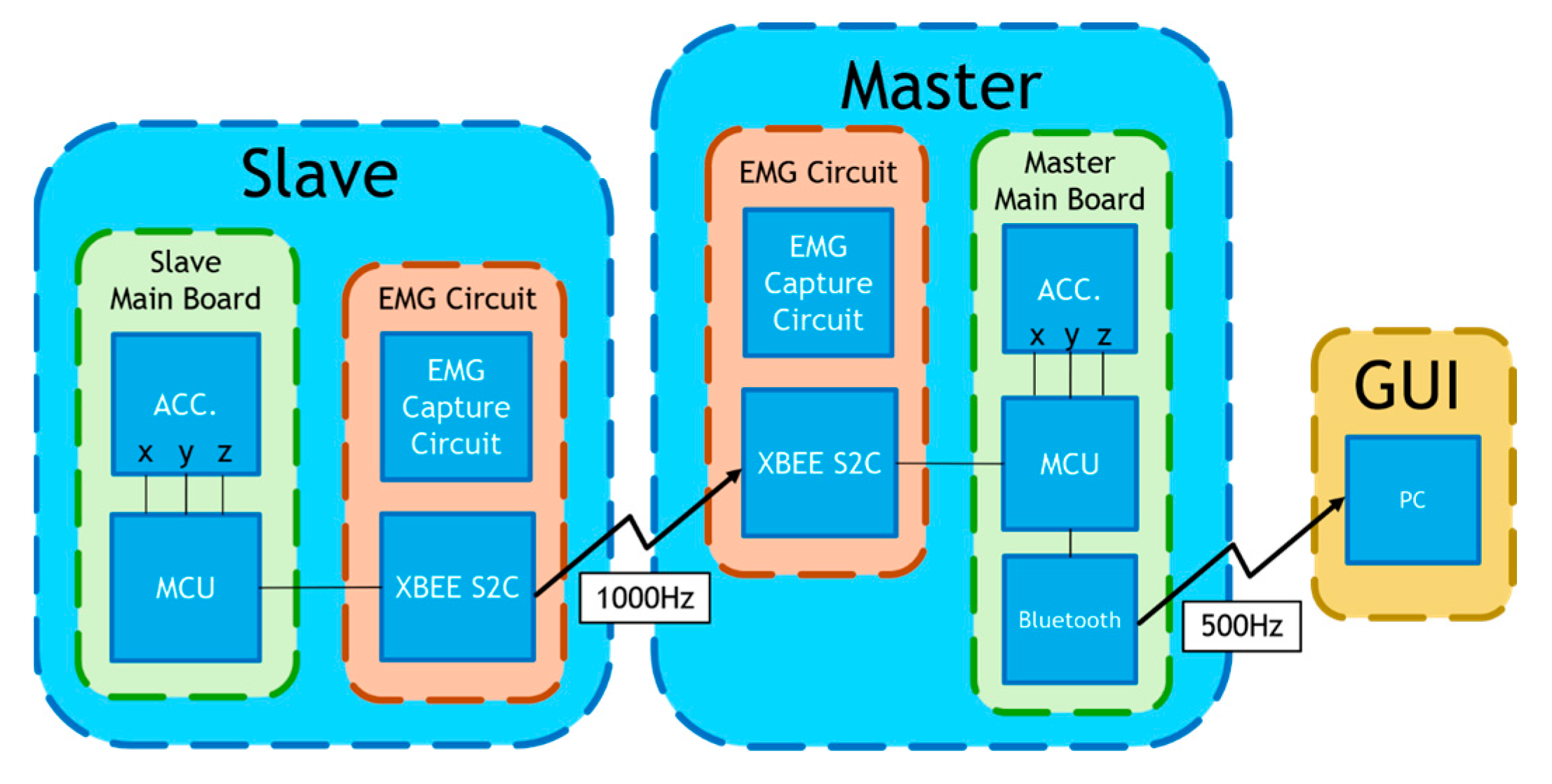
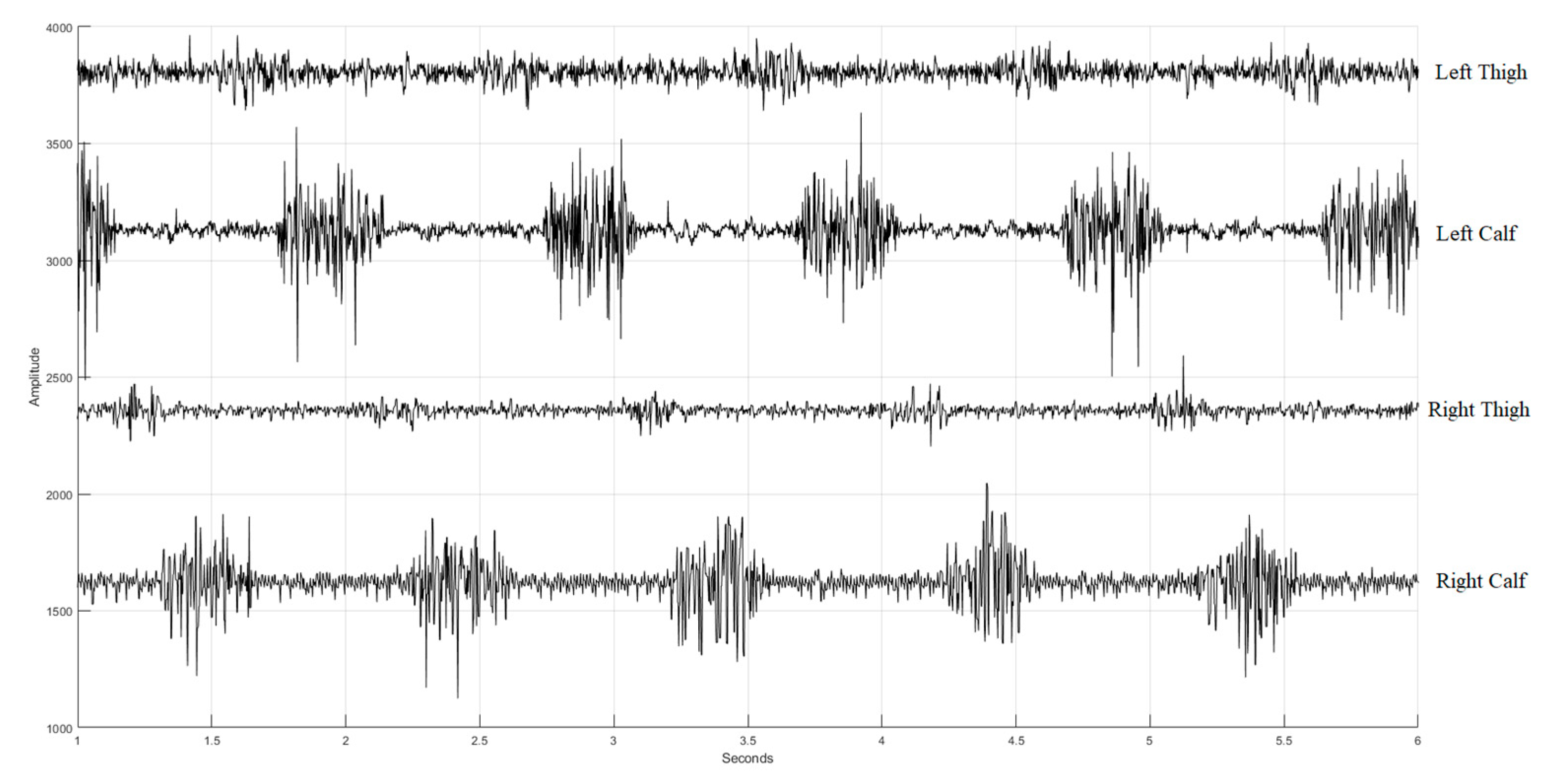
2.1.2. sEMG Measuring Device
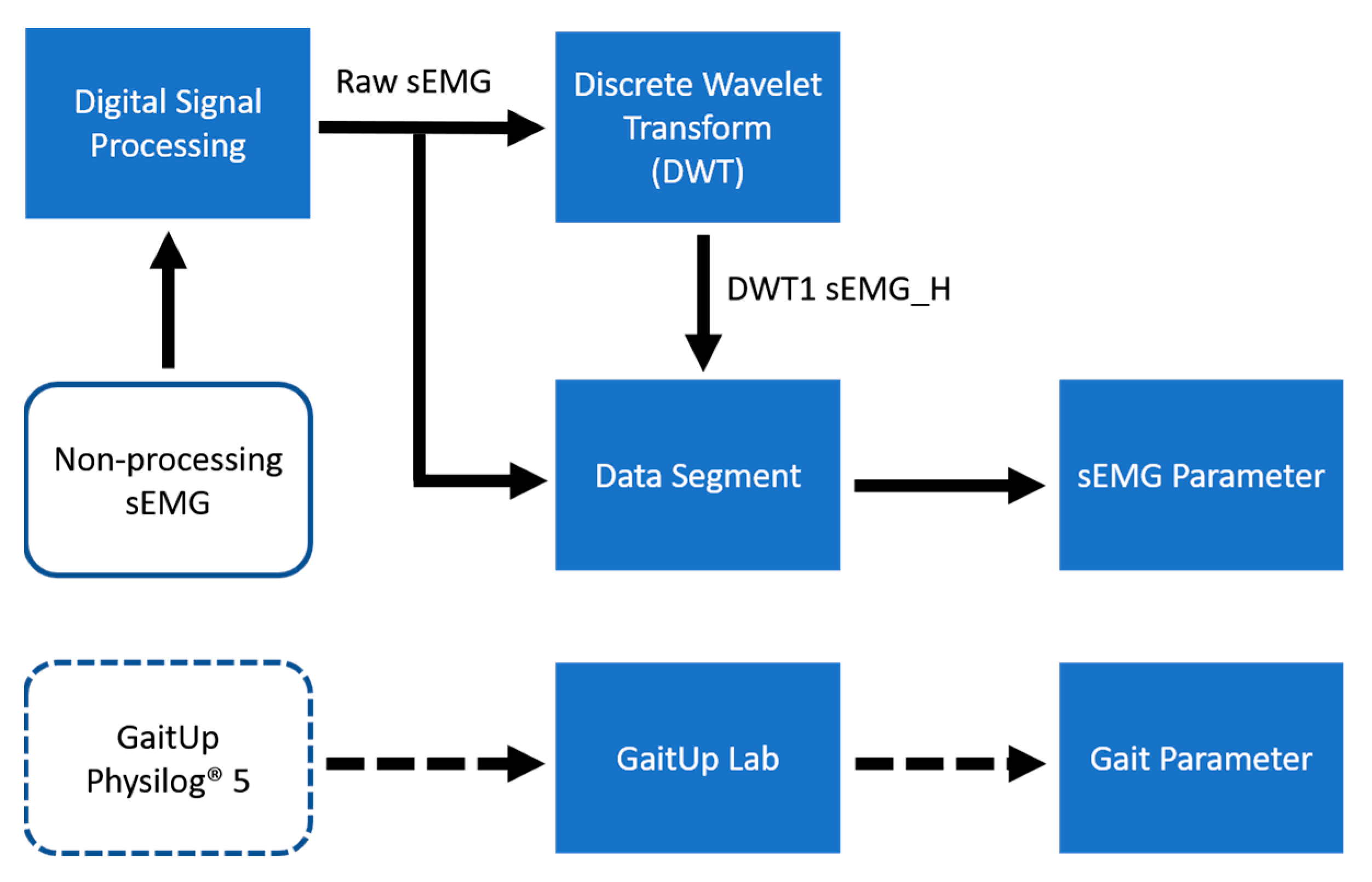
2.2. Data Processing
2.2.1. Digital Filtering
2.2.2. Discrete Wavelet Transform
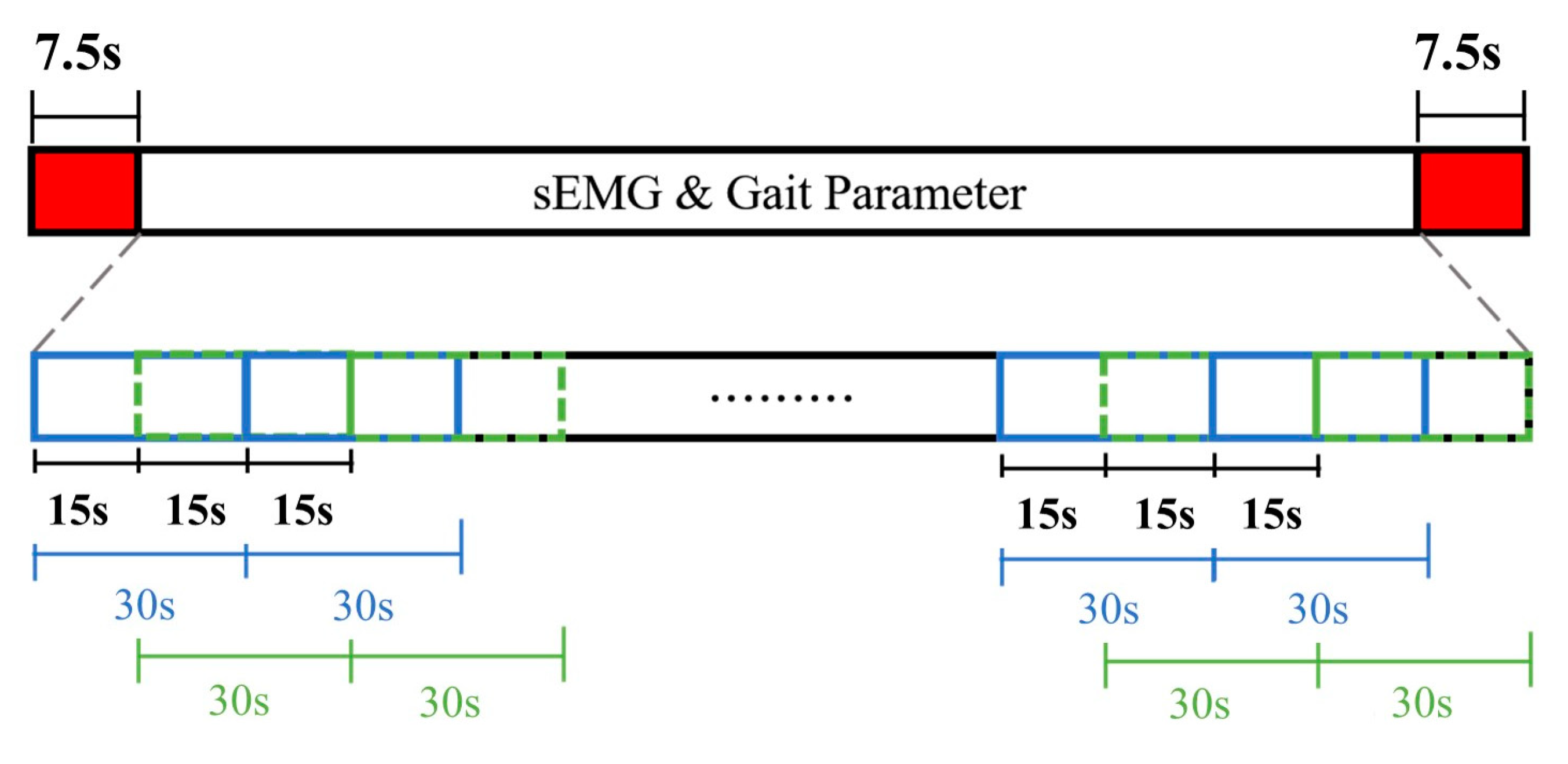
2.2.3. Data Segmentation
2.2.4. sEMG Parameters
- ,
- .
- d […] indicates the Euclidean distance or Manhattan distance?
2.3. Experiment Protocol
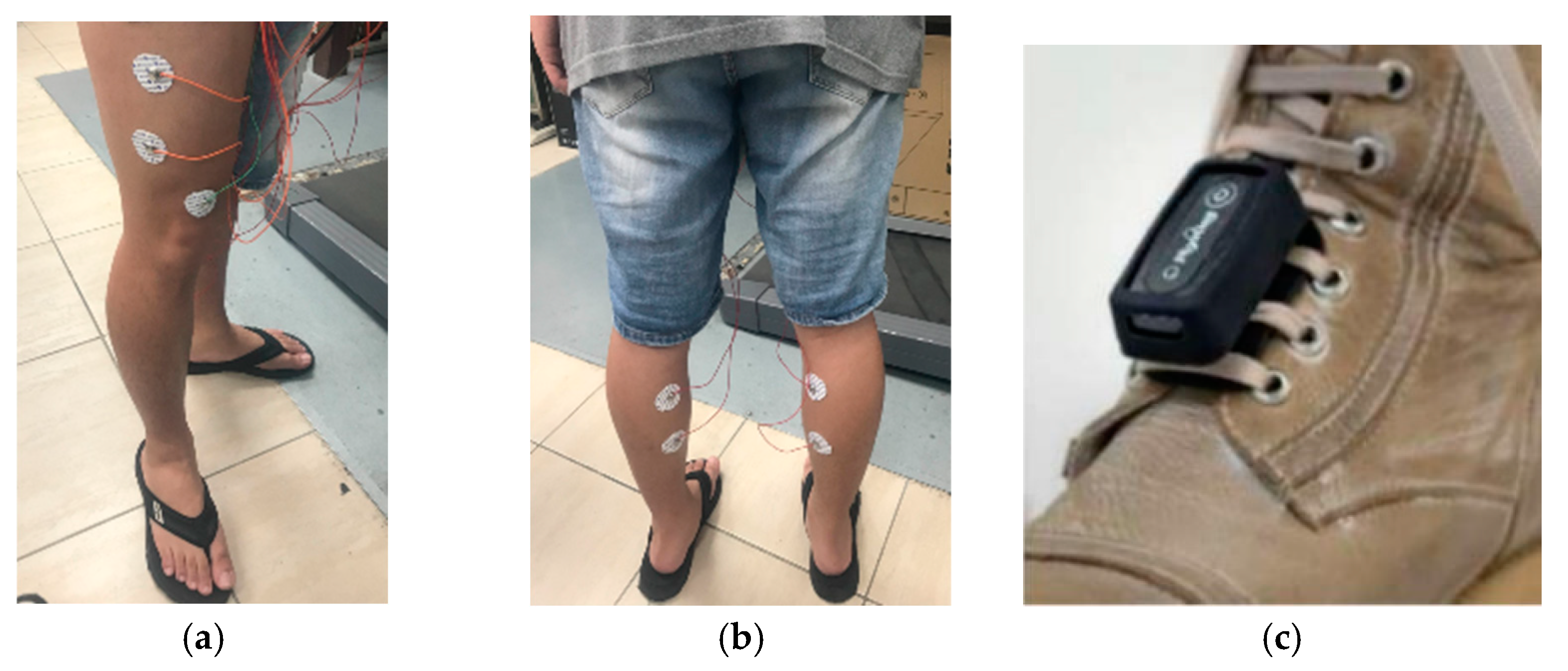
- In the sEMG measurement, there were four distinct sets of electrodes. These are individually adhered to the vastus lateralis and gastrocnemius muscle dips and plateau regions related to the presence of an innervation zone on each foot [11]. As shown in Figure 7, the reference electrode is positioned on the knee-facing side of the rectus femoris muscle (shown in Figure 7a,b). We avoided the belly position of the muscle and shifted the electrodes to a higher position. The surface electrodes used for the sEMG recording were Ag/AgCl with a 10 mm diameter on self-adhesive supports. The positions of the electrodes for each subject were recorded, and the electrodes were placed at the same position in the subsequent experiments. The shoe-worn GaitUp Physilog® 5 wearable inertial sensors were placed on the tongue area of both shoes, as shown in Figure 7c. It was essential to ascertain that the electrodes and sensors remained secure, preventing any potential loosening from movement that could compromise data integrity.
- The subjects ran on the treadmill at a speed of 5 km per hour for a duration of 6 min.
- The subjects would evaluate their physical state and make necessary modifications during each experiment, all ensuring at least a 10 min break.
- Subjects were measured four times. The interval between any two measurement sessions is at least a week.
2.4. Regression Model
2.4.1. Decision Tree
2.4.2. Random Forest
2.4.3. XGBoost
2.5. Statistical Analysis
3. Results
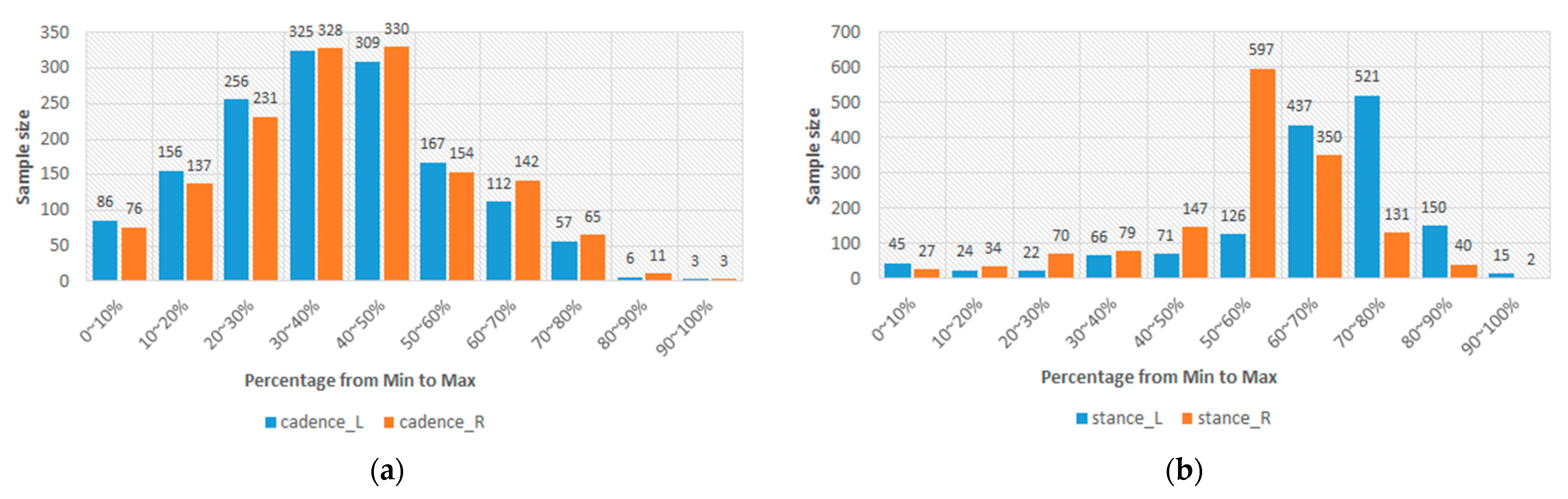
3.1. Selection of Gait Parameters
3.2. Optimal sEMG Parameters
3.3. Regression Models
3.4. Optimize Hyperparameters
3.5. Cross-Validation
3.6. Training and Prediction Time
3.7. Model Size
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dorschky, E.; Nitschke, M.; Martindale, C.F.; van den Bogert, A.J.; Koelewijn, A.D.; Eskofier, B.M. CNN-Based Estimation of Sagittal Plane Walking and Running Biomechanics from Measured and Simulated Inertial Sensor Data. Front. Bioeng. Biotechnol. 2020, 8, 604. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.-K.; Bae, M.-N.; Lee, K.B.; Hong, S.G. Identification of Patients with Sarcopenia Using Gait Parameters Based on Inertial Sensors. Sensors 2021, 21, 1786. [Google Scholar] [CrossRef] [PubMed]
- Dubois, A.; Charpillet, F. A Gait Analysis Method Based on a Depth Camera for Fall Prevention. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 4515–4518. [Google Scholar]
- Prince, F.; Corriveau, H.; Hébert, R.; Winter, D.A. Gait in the Elderly. Gait Posture 1997, 5, 128–135. [Google Scholar] [CrossRef]
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait Analysis Methods: An Overview of Wearable and Non-Wearable Systems, Highlighting Clinical Applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Landi, F.; Liperoti, R.; Russo, A.; Giovannini, S.; Tosato, M.; Capoluongo, E.; Bernabei, R.; Onder, G. Sarcopenia as a Risk Factor for Falls in Elderly Individuals: Results from the IlSIRENTE Study. Clin. Nutr. 2012, 31, 652–658. [Google Scholar] [CrossRef] [PubMed]
- Clancy, E.A.; Morin, E.L.; Hajian, G.; Merletti, R. Tutorial. Surface Electromyogram (SEMG) Amplitude Estimation: Best Practices. J. Electromyogr. Kinesiol. 2023, 72, 102807. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.-H.; Chang, K.-M.; Cheng, D.-C. The Progression of Muscle Fatigue During Exercise Estimation with the Aid of High-Frequency Component Parameters Derived From Ensemble Empirical Mode Decomposition. IEEE J. Biomed. Health Inform. 2014, 18, 1647–1658. [Google Scholar] [CrossRef] [PubMed]
- Agostini, V.; Ghislieri, M.; Rosati, S.; Balestra, G.; Knaflitz, M. Surface Electromyography Applied to Gait Analysis: How to Improve Its Impact in Clinics? Front. Neurol. 2020, 11, 994. [Google Scholar] [CrossRef]
- Wei, W.; Tan, F.; Zhang, H.; Mao, H.; Fu, M.; Samuel, O.W.; Li, G. Surface Electromyogram, Kinematic, and Kinetic Dataset of Lower Limb Walking for Movement Intent Recognition. Sci. Data 2023, 10, 358. [Google Scholar] [CrossRef]
- Habenicht, R.; Ebenbichler, G.; Bonato, P.; Kollmitzer, J.; Ziegelbecker, S.; Unterlerchner, L.; Mair, P.; Kienbacher, T. Age-Specific Differences in the Time-Frequency Representation of Surface Electromyographic Data Recorded during a Submaximal Cyclic Back Extension Exercise: A Promising Biomarker to Detect Early Signs of Sarcopenia. J. Neuroeng. Rehabil. 2020, 17, 8. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, G.; Li, J.; Sun, Y.; Jiang, G.; Zeng, F.; Zhao, H.; Chen, D. Visualization of Activated Muscle Area Based on SEMG. J. Intell. Fuzzy Syst. 2020, 38, 2623–2634. [Google Scholar] [CrossRef]
- Chambers, H.G.; Sutherland, D.H. A Practical Guide to Gait Analysis. J. Am. Acad. Orthop. Surg. 2002, 10, 222–231. [Google Scholar] [CrossRef] [PubMed]
- Chester, V.L.; Biden, E.N.; Tingley, M. Gait Analysis. Biomed. Instrum. Technol. 2005, 39, 64–74. [Google Scholar] [PubMed]
- Carroll, K.; Kennedy, R.A.; Koutoulas, V.; Bui, M.; Kraan, C.M. Validation of Shoe-Worn Gait Up Physilog®5 Wearable Inertial Sensors in Adolescents. Gait Posture 2022, 91, 19–25. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Rouhani, H.; Crevoisier, X.; Aminian, K. Quantitative Estimation of Foot-Flat and Stance Phase of Gait Using Foot-Worn Inertial Sensors. Gait Posture 2013, 37, 229–234. [Google Scholar] [CrossRef] [PubMed]
- Shehab, M.; Abualigah, L.; Shambour, Q.; Abu-Hashem, M.A.; Shambour, M.K.Y.; Alsalibi, A.I.; Gandomi, A.H. Machine learning in medical applications: A review of state-of-the-art methods. Comput. Biol. Med. 2022, 145, 105458. [Google Scholar] [CrossRef] [PubMed]
- Magoulas, G.D.; Prentza, A. Machine Learning in Medical Applications; SpringLink: Berlin/Heidelberg, Germany, 2001; pp. 300–307. [Google Scholar]
- Liu, S.-H.; Liu, L.-J.; Pan, K.-L.; Chen, W.; Tan, T.-H. Using the Characteristics of Pulse Waveform to Enhance the Accuracy of Blood Pressure Measurement by a Multi-Dimension Regression Model. Appl. Sci. 2019, 9, 2922. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, J.; Chen, X.; Wang, Y.; Zhao, Z. Continuous Blood Pressure Estimation Based on Multiple Parameters from Eletrocardiogram and Photoplethysmogram by Back-Propagation Neural Network. Comput. Ind. 2017, 89, 50–59. [Google Scholar] [CrossRef]
- Wu, X.; Park, S. An Inverse Relation between Hyperglycemia and Skeletal Muscle Mass Predicted by Using a Machine Learning Approach in Middle-Aged and Older Adults in Large Cohorts. J. Clin. Med. 2021, 10, 2133. [Google Scholar] [CrossRef]
- Pouladzadeh, P.; Kuhad, P.; Peddi, S.V.B.; Yassine, A.; Shirmohammadi, S. Food Calorie Measurement Using Deep Learning Neural Network. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Ruede, R.; Heusser, V.; Frank, L.; Roitberg, A.; Haurilet, M.; Stiefelhagen, R. Multi-Task Learning for Calorie Prediction on a Novel Large-Scale Recipe Dataset Enriched with Nutritional Information. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 4001–4008. [Google Scholar]
- Mhaskar, H.N.; Pereverzyev, S.V.; van der Walt, M.D. A Deep Learning Approach to Diabetic Blood Glucose Prediction. Front. Appl. Math. Stat. 2017, 3, 14. [Google Scholar] [CrossRef]
- Liu, S.-H.; Yang, Z.-K.; Pan, K.-L.; Zhu, X.; Chen, W. Estimation of Left Ventricular Ejection Fraction Using Cardiovascular Hemodynamic Parameters and Pulse Morphological Characteristics with Machine Learning Algorithms. Nutrients 2022, 14, 4051. [Google Scholar] [CrossRef] [PubMed]
- Satija, U.; Ramkumar, B.; Manikandan, M.S. A Review of Signal Processing Techniques for Electrocardiogram Signal Quality Assessment. IEEE Rev. Biomed. Eng. 2018, 11, 36–52. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, M.H.; Shuzan, M.N.I.; Chowdhury, M.E.H.; Mahbub, Z.B.; Uddin, M.M.; Khandakar, A.; Reaz, M.B.I. Estimating Blood Pressure from the Photoplethysmogram Signal and Demographic Features Using Machine Learning Techniques. Sensors 2020, 20, 3127. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.-H.; Wang, J.-J.; Chen, W.; Pan, K.-L.; Su, C.-H. Classification of Photoplethysmographic Signal Quality with Fuzzy Neural Network for Improvement of Stroke Volume Measurement. Appl. Sci. 2020, 10, 1476. [Google Scholar] [CrossRef]
- Sraitih, M.; Jabrane, Y.; Hajjam El Hassani, A. An Automated System for ECG Arrhythmia Detection Using Machine Learning Techniques. J. Clin. Med. 2021, 10, 5450. [Google Scholar] [CrossRef]
- Dubois, A.; Bihl, T.; Bresciani, J.-P. Identifying Fall Risk Predictors by Monitoring Daily Activities at Home Using a Depth Sensor Coupled to Machine Learning Algorithms. Sensors 2021, 21, 1957. [Google Scholar] [CrossRef]
- Louridas, P.; Ebert, C. Machine Learning. IEEE Softw. 2016, 33, 110–115. [Google Scholar] [CrossRef]
- Xin, Y.; Kong, L.; Liu, Z.; Chen, Y.; Li, Y.; Zhu, H.; Gao, M.; Hou, H.; Wang, C. Machine Learning and Deep Learning Methods for Cybersecurity. IEEE Access 2018, 6, 35365–35381. [Google Scholar] [CrossRef]
- Beam, A.L.; Kohane, I.S. Big Data and Machine Learning in Health Care. JAMA 2018, 319, 1317. [Google Scholar] [CrossRef]
- Chen, J.H.; Asch, S.M. Machine Learning and Prediction in Medicine—Beyond the Peak of Inflated Expectations. N. Engl. J. Med. 2017, 376, 2507–2509. [Google Scholar] [CrossRef]
- Gait Up SA Physilog—Digital Motion Analysis Platform. Available online: https://physilog.com (accessed on 2 April 2023).
- Liu, S.-H.; Lin, C.-B.; Chen, Y.; Chen, W.; Huang, T.-S.; Hsu, C.-Y. An EMG Patch for the Real-Time Monitoring of Muscle-Fatigue Conditions During Exercise. Sensors 2019, 19, 3108. [Google Scholar] [CrossRef] [PubMed]
- Mallat, S.G. A Theory for Multiresolution Signal Decomposition: The Wavelet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Phinyomark, A.; Thongpanja, S.; Hu, H.; Phukpattaranont, P.; Limsakul, C. The Usefulness of Mean and Median Frequencies in Electromyography Analysis. In Computational Intelligence in Electromyography Analysis—A Perspective on Current Applications and Future Challenges; InTech: London, UK, 2012. [Google Scholar]
- Aghamohammadi-Sereshki, A.; Bayazi, M.-J.D.; Ghomsheh, F.T.; Amirabdollahian, F. Investigation of Fatigue Using Different EMG Features. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 115–120. [Google Scholar]
- Zhang, X.; Zhou, P. Sample Entropy Analysis of Surface EMG for Improved Muscle Activity Onset Detection against Spurious Background Spikes. J. Electromyogr. Kinesiol. 2012, 22, 901–907. [Google Scholar] [CrossRef] [PubMed]
- Crenshaw, A.G.; Karlsson, S.; Gerdle, B.; Fridén, J. Differential Responses in Intramuscular Pressure and EMG Fatigue Indicators during Low- vs. High-level Isometric Contractions to Fatigue. Acta Physiol. Scand. 1997, 160, 353–361. [Google Scholar] [CrossRef]
- Czartoryski, P.; Garcia, J.; Manimaleth, R.; Napolitano, P.; Watters, H.; Weber, C.; Alvarez-Beaton, A.; Nieto, A.C.; Patel, A.; Peacock, C.; et al. Body Composition Assessment: A Comparison of the DXA, InBody 270, and Omron. J. Exerc. Nutr. 2020, 3, 1–6. [Google Scholar]
- Kotsiantis, S.B. Decision Trees: A Recent Overview. Artif. Intell. Rev. 2013, 39, 261–283. [Google Scholar] [CrossRef]
- Kingsford, C.; Salzberg, S.L. What Are Decision Trees? Nat. Biotechnol. 2008, 26, 1011–1013. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Martínez-Gramage, J.; Albiach, J.P.; Moltó, I.N.; Amer-Cuenca, J.J.; Huesa Moreno, V.; Segura-Ortí, E. A Random Forest Machine Learning Framework to Reduce Running Injuries in Young Triathletes. Sensors 2020, 20, 6388. [Google Scholar] [CrossRef]
- Pan, S.; Zheng, Z.; Guo, Z.; Luo, H. An Optimized XGBoost Method for Predicting Reservoir Porosity Using Petrophysical Logs. J. Pet. Sci. Eng. 2022, 208, 109520. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 13–17 August 2016; ACM: New York, NY, USA, 2016; Volume 42, pp. 785–794. [Google Scholar]
- Ratner, B. The Correlation Coefficient: Its Values Range Between +1/−1, or Do They? J. Target. Meas. Anal. Mark. 2009, 17, 139–142. [Google Scholar] [CrossRef]
- Altmann, A.; Toloşi, L.; Sander, O.; Lengauer, T. Permutation Importance: A Corrected Feature Importance Measure. Bioinformatics 2010, 26, 1340–1347. [Google Scholar] [CrossRef] [PubMed]
- Akiba, T.; Sano, S.; Yanase, T.; Ohta, T.; Koyama, M. Optuna: A Next-Generation Hyperparameter Optimization Framework. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; ACM: New York, NY, USA, 2019; pp. 2623–2631. [Google Scholar]
- Browne, M.W. Cross-Validation Methods. J. Math. Psychol. 2000, 44, 108–132. [Google Scholar] [CrossRef] [PubMed]
- Pheasant, S.T. A Review of: “Human Walking”. By V.T. Inman, H.J. Ralston and F. Todd. (Baltimore, London: Williams & Wilkins, 1981.) [Pp.154.]. Ergonomics 1981, 24, 969–976. [Google Scholar] [CrossRef]
- Ismail, M.; Batool, S.; Haider, Z.; Khan, M.H.; Ali, I.; Haider, Z. Review on the Detection of Multiple Neuromuscular Disorder Using Electromyography. South. J. Eng. Technol. 2023, 1, 46–68. [Google Scholar]
- Lanovaz, J.L.; Oates, A.R.; Treen, T.T.; Unger, J.; Musselman, K.E. Validation of a Commercial Inertial Sensor System for Spatiotemporal Gait Measurements in Children. Gait Posture 2017, 51, 14–19. [Google Scholar] [CrossRef] [PubMed]
- Agostini, V.; Lo Fermo, F.; Massazza, G.; Knaflitz, M. Does Texting While Walking Really Affect Gait in Young Adults? J. Neuroeng. Rehabil. 2015, 12, 86. [Google Scholar] [CrossRef]
- Castagneri, C.; Agostini, V.; Rosati, S.; Balestra, G.; Knaflitz, M. Asymmetry Index in Muscle Activations. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 772–779. [Google Scholar] [CrossRef]
- Disselhorst-Klug, C.; Schmitz-Rode, T.; Rau, G. Surface Electromyography and Muscle Force: Limits in SEMG–Force Relationship and New Approaches for Applications. Clin. Biomech. 2009, 24, 225–235. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Gait Parameter | Name | Description |
|---|---|---|---|
| Temporal parameter | HS | Heel Strike | The point is when the heel hits the ground. |
| CD | Cycle Duration | The time spent in one gait cycle is the time difference from the heel strike of the same foot to the next heel strike. | |
| DLS | Double Leg Support | The bipedal stance period is the proportion of the gait cycle when both feet are on the ground. | |
| Cadence | Cadence | Number of steps taken per minute. | |
| Stance | Stance Ratio | The stance period is the portion of the gait cycle during which the foot is in contact with the ground. | |
| SR | Swing Ratio | The swing period is the proportion of the gait cycle spent with the foot off the ground. | |
| LR | Load Ratio | The proportion of the stance period from the time when the heel strikes to when the sole of the foot touches the ground. | |
| FFR | Foot Flat Ratio | The proportion of the stance period in which the foot is completely flat on the ground. | |
| PR | Push Ratio | The proportion of the stance period from when the soles of the feet are flat to when the toes are off the ground. | |
| Spatial parameters | Step Length | Step Length | The distance between one foot and the other foot on the ground. |
| Strike Length | Stride Length | Distance from one heel strike to the next, equating one gait cycle. | |
| Speed | Gait Speed | Average forward walking speed. | |
| PAVS | Max. Angular Velocity During Swing | Maximum angular velocity in swing between the heel’s maximum height and the toe’s minimum height. | |
| SMTC | Foot Speed Norm at Minimal Toe Clearance | Maximum swing forward speed, typically over 3 times the pace, occurs near the minimum toe-off height. | |
| SA | Foot Pitch Angle at Heel Strike (Strike Angle) | The angle of the foot to the ground when it hits the ground. | |
| LoA | Foot Pitch Angle at Toe-Off (Lift-Off Angle) | Angle of toes to ground at the end of propulsion before lift-off. | |
| SW | Swing Width | The maximum lateral offset in the swing period equals the greatest lateral distance in the trajectory. | |
| Path Length | 3D Path Length | Describes a 3D gait cycle trajectory scaled by stride length. | |
| Turn analysis | TA | Turning Angle | Deflection angle for two consecutive flat steps of the same foot. |
| Ground clearance analysis | maxHC | Max. Heel Clearance | Heel reaches peak height off ground in each gait cycle. |
| maxTC1 | Max.1 Toe Clearance | After the heel’s peak height, the toes reach maximum height off the ground. | |
| minTC | Min. Toe Clearance | Minimum toe-off height during swing. | |
| maxTC2 | Max.2 Toe Clearance | Toes reach maximum height off the ground before heels are ready to strike. |
| Parameter | Unit | MIN | MAX | AVE | STD |
|---|---|---|---|---|---|
| HS_L | Millisecond | 9.03 | 15.83 | 14.76 | 0.71 |
| HS_R | Millisecond | 9.30 | 15.86 | 14.77 | 0.69 |
| CD_L | Second | 0.85 | 1.17 | 1.02 | 0.06 |
| CD_R | Second | 0.86 | 1.17 | 1.02 | 0.06 |
| DS_L | % of cycle duration | 8.05 | 26.96 | 20.35 | 3.25 |
| DS_R | % of cycle duration | 8.05 | 26.96 | 20.35 | 3.25 |
| Cadence_L | steps/minute | 103.00 | 141.18 | 117.50 | 6.67 |
| Cadence_R | steps/minute | 102.56 | 140.35 | 117.48 | 6.67 |
| Stance_L | % of cycle duration | 53.46 | 64.04 | 60.28 | 1.90 |
| Stance_R | % of cycle duration | 54.07 | 65.30 | 60.22 | 1.73 |
| SR_L | % of gait cycle | 35.96 | 46.54 | 39.72 | 1.90 |
| SR_R | % of gait cycle | 34.70 | 45.93 | 39.78 | 1.73 |
| LR_L | % of stance | 8.00 | 20.80 | 12.74 | 2.53 |
| LR_R | % of stance | 7.81 | 21.49 | 12.88 | 2.60 |
| FFR_L | % of stance | 33.77 | 56.03 | 47.32 | 4.67 |
| FFR_R | % of stance | 28.70 | 57.85 | 46.45 | 5.26 |
| PR_L | % of stance | 31.76 | 53.55 | 39.85 | 4.22 |
| PR_R | % of stance | 30.68 | 54.08 | 40.50 | 4.90 |
| Step Length_L | Meter | 0.53 | 0.74 | 0.64 | 0.04 |
| Step Length_R | Meter | 0.49 | 0.72 | 0.62 | 0.04 |
| Strike Length_L | Meter | 1.01 | 1.43 | 1.25 | 0.07 |
| Strike Length_R | Meter | 1.01 | 1.43 | 1.24 | 0.07 |
| Speed_L | meter/s | 1.18 | 1.28 | 1.23 | 0.02 |
| Speed_R | meter/s | 1.17 | 1.27 | 1.22 | 0.02 |
| PAVS_L | degree/s | 327.96 | 546.44 | 412.20 | 39.17 |
| PAVS_R | degree/s | 334.39 | 846.93 | 408.69 | 33.76 |
| SMTC_L | meter/s | 3.40 | 4.13 | 3.80 | 0.15 |
| SMTC_R | meter/s | 3.20 | 4.08 | 3.74 | 0.13 |
| SA_L | Degree | 10.35 | 34.33 | 23.02 | 4.79 |
| SA_R | Degree | 9.31 | 33.67 | 23.24 | 4.56 |
| LoA_L | Degree | −97.11 | −63.32 | −81.29 | 7.11 |
| LoA_R | Degree | −93.12 | −66.14 | −81.91 | 6.56 |
| SW_L | Meter | 0.01 | 0.08 | 0.04 | 0.02 |
| SW_R | Meter | −0.09 | −0.01 | −0.05 | 0.01 |
| Path Length_L | % of stride length | 102.75 | 107.92 | 105.27 | 1.09 |
| Path Length_R | % of stride length | 102.78 | 109.14 | 105.34 | 1.04 |
| TA_L | Degree | −1.61 | 1.70 | 0.21 | 0.50 |
| TA_R | Degree | −2.44 | 1.14 | −0.54 | 0.53 |
| maxHC_L | Meter | 0.22 | 0.36 | 0.26 | 0.02 |
| maxHC_R | Meter | 0.22 | 0.33 | 0.25 | 0.02 |
| maxTC1_L | Meter | 0.04 | 0.17 | 0.06 | 0.02 |
| maxTC1_R | Meter | 0.03 | 0.14 | 0.06 | 0.01 |
| minTC_L | Meter | 0.00 | 0.05 | 0.03 | 0.01 |
| minTC_R | Meter | 0.00 | 0.06 | 0.03 | 0.01 |
| maxTC2_L | Meter | 0.07 | 0.18 | 0.12 | 0.02 |
| maxTC2_R | Meter | 0.06 | 0.18 | 0.12 | 0.02 |
| Gait Parameter | Left Side | Right Side |
|---|---|---|
| HS | 0.801 | 0.854 |
| * CD | 0.897 | 0.899 |
| * DLS | 0.931 | 0.893 |
| * Cadence | 0.913 | 0.909 |
| Stance | 0.917 | 0.780 |
| SR | 0.926 | 0.808 |
| * LR | 0.877 | 0.862 |
| * FFR | 0.917 | 0.906 |
| * PR | 0.907 | 0.907 |
| * Step length | 0.862 | 0.836 |
| * Strike length | 0.888 | 0.883 |
| Speed | 0.776 | 0.798 |
| PAVS | 0.883 | 0.793 |
| * SMTC | 0.919 | 0.913 |
| SA | 0.881 | 0.941 |
| * LoA | 0.932 | 0.913 |
| * SW | 0.903 | 0.874 |
| * Path length | 0.904 | 0.898 |
| TA | 0.748 | 0.723 |
| maxHC | 0.908 | 0.809 |
| maxTC1 | 0.918 | 0.702 |
| * minTC | 0.851 | 0.812 |
| * maxTC2 | 0.884 | 0.881 |
| Feature | Raw_sEMG | DWTH_sEMG | ||
|---|---|---|---|---|
| Thigh | Calf | Thigh | Calf | |
| MF | 0.08 | 0.17 | 0.07 | 0.05 |
| MDF | 0.11 | 0.07 | 0.02 | 0.03 |
| STD | 0.06 | 0.13 | 0.25 | 0.21 |
| SampEn | 0.11 | 0.14 | 0.09 | 0.23 |
| RMS | 0 | 0 | 0 | 0 |
| AP | 0 | 0 | 0 | 0 |
| Name | Left Foot | Right Foot | ||||
|---|---|---|---|---|---|---|
| DT | RF | XGBoost | DT | RF | XGBoost | |
| CD | 0.84 | 0.93 | 0.90 | 0.81 | 0.93 | 0.90 |
| DLS | 0.83 | 0.93 | 0.93 | 0.71 | 0.91 | 0.89 |
| Cadence | 0.84 | 0.93 | 0.91 | 0.80 | 0.93 | 0.91 |
| LR | 0.75 | 0.90 | 0.88 | 0.75 | 0.88 | 0.86 |
| FFR | 0.81 | 0.94 | 0.92 | 0.82 | 0.93 | 0.91 |
| PR | 0.78 | 0.92 | 0.91 | 0.84 | 0.93 | 0.91 |
| Step length | 0.80 | 0.91 | 0.86 | 0.76 | 0.91 | 0.84 |
| Strike length | 0.81 | 0.92 | 0.89 | 0.78 | 0.92 | 0.88 |
| SMTC | 0.83 | 0.94 | 0.92 | 0.81 | 0.93 | 0.91 |
| SA | 0.84 | 0.93 | 0.93 | 0.77 | 0.93 | 0.91 |
| SW | 0.82 | 0.93 | 0.90 | 0.76 | 0.91 | 0.87 |
| Path length | 0.78 | 0.91 | 0.90 | 0.79 | 0.93 | 0.90 |
| minTC | 0.74 | 0.88 | 0.85 | 0.74 | 0.88 | 0.81 |
| maxTC2 | 0.82 | 0.92 | 0.88 | 0.70 | 0.91 | 0.88 |
| Mean | 0.806 | 0.920 | 0.899 | 0.774 | 0.916 | 0.884 |
| STD | 0.033 | 0.016 | 0.030 | 0.040 | 0.018 | 0.030 |
| Model | Hyperparameter | Range | Value |
|---|---|---|---|
| DT | max_depth | 10~500 | 10 |
| min_simples_split | 1~32 | 2 | |
| min_samples_leaf | 1~10 | 1 | |
| RF | n_estimators | 100~500 | 50 |
| max_features | sqrt|log2 | sqrt | |
| max_depth | 5~15 | 15 | |
| min_simples_split | 1~32 | 2 | |
| min_samples_leaf | 1~10 | 1 | |
| XGBoost | n_estimators | 500~100 | 200 |
| learning_rate | 0.1~1.0 | 0.1 | |
| max_depth | 5~15 | 13 | |
| subsample | 0.1~1.0 | 0.8 | |
| min_chilld_weight | 0~300 | 30 |
| Models | Mean | STD |
|---|---|---|
| DT | 0.796 | 0.017 |
| RF | 0.915 | 0.006 |
| XGBoost | 0.894 | 0.007 |
| Models | Training Time (s) | Predicting Time (s) |
|---|---|---|
| DT | 0.02 | ≥0.01 |
| RF | 0.34 | ≥0.01 |
| XGBoost | 2.10 | 0.02 |
| Model | Size (KB) |
|---|---|
| DT | 56 |
| RF | 11,045 |
| XGBoost | 5805 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.-H.; Ting, C.-E.; Wang, J.-J.; Chang, C.-J.; Chen, W.; Sharma, A.K. Estimation of Gait Parameters for Adults with Surface Electromyogram Based on Machine Learning Models. Sensors 2024, 24, 734. https://doi.org/10.3390/s24030734
Liu S-H, Ting C-E, Wang J-J, Chang C-J, Chen W, Sharma AK. Estimation of Gait Parameters for Adults with Surface Electromyogram Based on Machine Learning Models. Sensors. 2024; 24(3):734. https://doi.org/10.3390/s24030734
Chicago/Turabian StyleLiu, Shing-Hong, Chi-En Ting, Jia-Jung Wang, Chun-Ju Chang, Wenxi Chen, and Alok Kumar Sharma. 2024. "Estimation of Gait Parameters for Adults with Surface Electromyogram Based on Machine Learning Models" Sensors 24, no. 3: 734. https://doi.org/10.3390/s24030734
APA StyleLiu, S.-H., Ting, C.-E., Wang, J.-J., Chang, C.-J., Chen, W., & Sharma, A. K. (2024). Estimation of Gait Parameters for Adults with Surface Electromyogram Based on Machine Learning Models. Sensors, 24(3), 734. https://doi.org/10.3390/s24030734