
Enhancing Weigh-in-Motion Systems Accuracy by Considering Camera-Captured Wheel Oscillations


Abstract
:1. Introduction
1.1. Background and Motivation
- 1.
- From a safety perspective, they pose an elevated risk of accidents, with the potential for more severe consequences than trucks that comply with regulations [1];
- 2.
- 3.
- From an environmental perspective, overloaded trucks lead to higher emissions and air pollution. Miftahulkhair et al. [3] showed that for a flexible pavement subjected to long-term overloading of trucks, increased fuel consumption was observed across all vehicles due to the pavement becoming more uneven.
- 1.
- 2.
- Environmental aspects (e.g., direction and speed of the wind [8]);
- 3.
- 4.
1.2. State-of-the-Art
1.3. Objectives and Methodology
2. Experimental Setup and Data Collection
3. Data Fusion Approach for Correcting the Measurement of Wheel Loads
3.1. Estimation of Static Wheel Loads
3.2. Extraction of Wheel Deflection from Camera Images
3.3. Correction of the Wheel Load Measurements
4. Data Fusion Validation
5. Results and Discussion
6. Method Uncertainties Affecting Correction Results
- Vertical wheel position measurement. Indeed, this primarily depends on the camera’s resolution and secondarily, the corresponding Hough transform algorithm. The cameras were set to achieve a resolution of 1 mm/pixel, taking the lateral position of the trucks into account. Therefore, we can assume that the uncertainty in the vertical position of the wheel is at least 1 pixel or 1 mm, respectively. Figure 5b shows that the span of the vertical wheel motion in the instance without a speed bump is about 10 mm. Therefore, 1 mm corresponds to 10% uncertainty in this case;
- Neutral position . Because of the complex oscillation form and the limited captured segment, the accuracy of the estimation of the neutral position was limited. A misestimation of 1 mm also leads to at least 10% uncertainty in the case without the speed bump shown in Figure 5b;
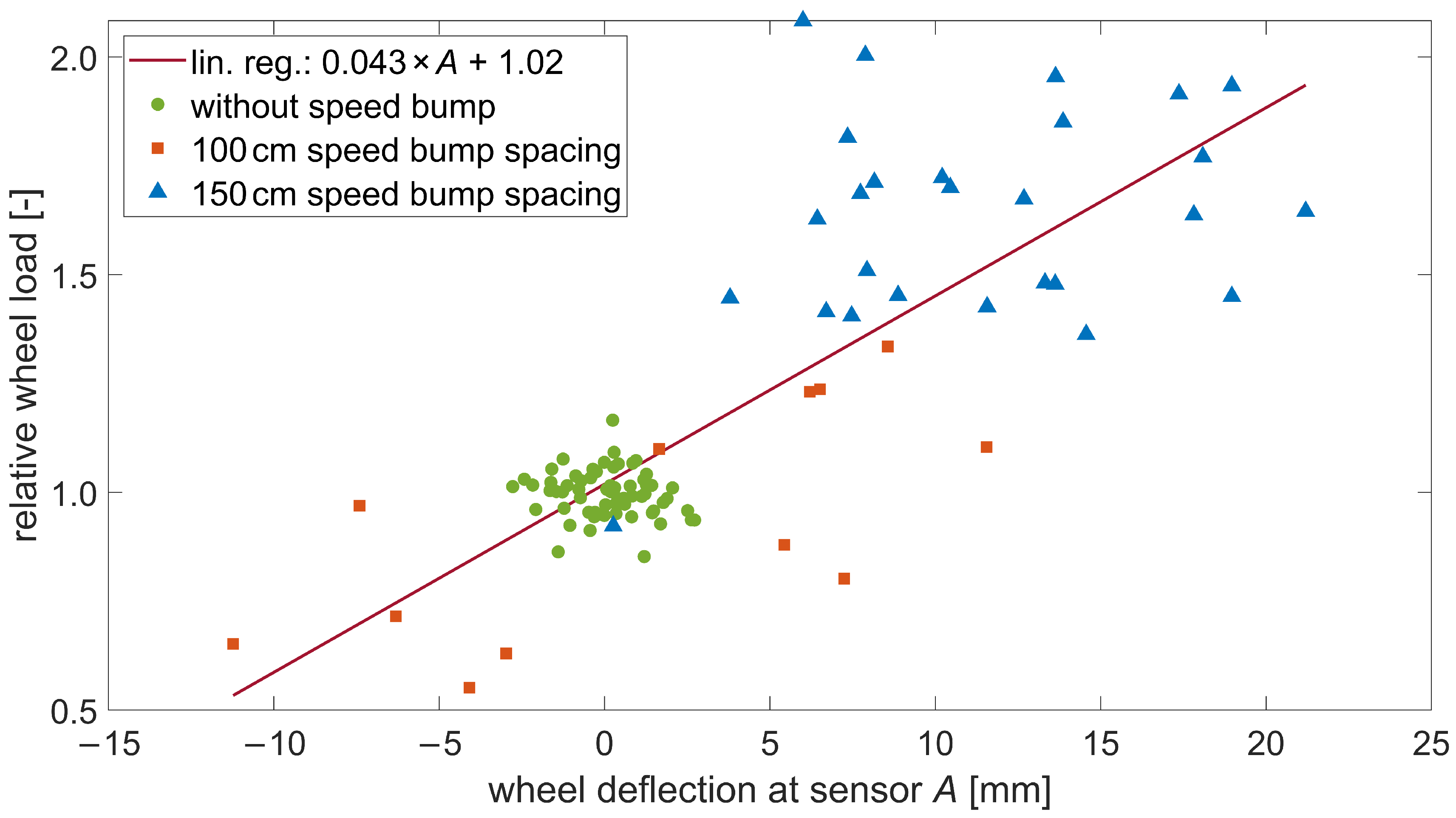
- Wheel deflection A. This is a combination of the two first uncertainties. A is about 3 mm in the example of Figure 5b. If the combination of the two above-mentioned uncertainties leads, for example, to a miscalculation of 1 mm, this yields in this example an error of 33% concerning A;
- Right-hand side vertical wheel movement. Because of technical limitations and the high complexity of the experimental setup, only the wheel oscillation on the left side of the trucks could be captured and we had to use it for correction on both sides;
- Static reference wheel loads. We had to use estimated static reference wheel loads instead of measured ones. We estimated the uncertainty at least about 3% (see Section 3.1);
- Additional influencing factors. Finally, it is possible that the vertical wheel movement alone cannot accurately represent the wheel load oscillation due to additional influencing factors that were not considered in this study. Factors like tire type or pressure or yet unknown factors might affect the correction strategy’s outcome. This effect might be observable, especially in the small wheel oscillation amplitudes that occurred in the case without a speed bump.
- Use a higher-resolution camera or higher-focal-length lens to cover the wheels as large as possible and reduce the mm per pixel ratio;
- Record wheel deflection over a longer distance using more cameras to increase the accuracy of the estimate of the neutral position by averaging more values;
- Record wheel deflection on both sides of the trucks using cameras;
- Measure individual static wheel loads as a reference using static weighing;
- Record more parameters that might influence the wheel load oscillation, such as tire type and pressure;
- Perform more test runs to increase the statistical validity;
- Place the speed bump at least 2 m in front of the sensor(s).
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jacob, B.; La Feypell-de Beaumelle, V. Improving truck safety: Potential of weigh-in-motion technology. IATSS Res. 2010, 34, 9–15. [Google Scholar] [CrossRef]
- Raheel, M.; Khan, R.; Khan, A.; Khan, M.T.; Ali, I.; Alam, B.; Wali, B. Impact of axle overload, asphalt pavement thickness and subgrade modulus on load equivalency factor using modified ESALs equation. Cogent Eng. 2018, 5, 1528044. [Google Scholar] [CrossRef]
- Miftahulkhair, M.; Arifin, M.Z.; Sutikno, F. Revealing the impact of losses on flexible pavement due to vehicle overloading. East. Eur. J. Enterp. Technol. 2024, 2, 55–63. [Google Scholar] [CrossRef]
- Burnos, P.; Gajda, J.; Sroka, R. Accuracy requirements for weigh-in-motion systems for direct enforcement. In Proceedings of the ICWIM8-International Conference on Weigh-in-Motion, Prague, Czech Republic, 19–23 May 2019; pp. 93–106. [Google Scholar]
- Jacob, B.; Cottineau, L.M. Weigh-in-motion for Direct Enforcement of Overloaded Commercial Vehicles. Transp. Res. Procedia 2016, 14, 1413–1422. [Google Scholar] [CrossRef]
- Dontu, A.I.; Barsanescu, P.D.; Andrusca, L.; Danila, N.A. Weigh-in-motion sensors and traffic monitoring systems—Sate of the art and development trends. IOP Conf. Ser. Mater. Sci. Eng. 2020, 997, 012113. [Google Scholar] [CrossRef]
- Pellizzon, N.D.; Da Silva, A.R.; Otto, G.G. Method for Setting Weight Tolerance Limits in High-Speed Weigh-in-Motion Systems: A Case Study in Brazil. Sustainability 2022, 14, 7039. [Google Scholar] [CrossRef]
- Scheuter, F. Evaluation of factors affecting WIM system accuracy. In Proceedings of the Second European Conference on COST, Lisbon, Portugal, 14–16 September 1998; Volume 323, pp. 14–16. [Google Scholar]
- Moharekpour, M.; Heetkamp, M.; Ueckermann, A.; Wegener, D.; Kemper, D.; Eckstein, L.; Oeser, M. Automatisierte Gewichtkontrolle von Schwerverkehr basierend auf dynamischer Achslastverwiegung. In Reifen–Fahrwerk–Fahrbahn; VDI Verlag: Düsseldorf, Germany, 2019; pp. 35–58. [Google Scholar] [CrossRef]
- Sonmez, U.; Sverdlova, N.; Tallon, R.; Klinikowski, D.; Streit, D. Static calibration methodology for weigh-in-motion systems. Int. J. Heavy Veh. Syst. 2000, 7, 191–204. [Google Scholar] [CrossRef]
- Hashemi Vaziri, S. Investigation of Environmental Impacts on Piezoelectric Weigh-in-Motion Sensing System. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2011. [Google Scholar]
- Ryguła, A.; Maczyński, A.; Brzozowski, K.; Grygierek, M.; Konior, A. Influence of Trajectory and Dynamics of Vehicle Motion on Signal Patterns in the WIM System. Sensors 2021, 21, 7895. [Google Scholar] [CrossRef] [PubMed]
- Burnos, P.; Rys, D. The Effect of Flexible Pavement Mechanics on the Accuracy of Axle Load Sensors in Vehicle Weigh-in-Motion Systems. Sensors 2017, 17, 2053. [Google Scholar] [CrossRef] [PubMed]
- Gajda, J.; Burnos, P. Temperature properties of Weigh-in-Motion systems. In Proceedings of the 7 International Conference on Weigh-in-Motion & PIARC Workshop, Foz do Iguaçu, Brazil, 7–10 November 2016; pp. 46–55. [Google Scholar]
- Jacob, B.; Dolcemascolo, V. Dynamic interaction between instrumented vehicles and pavements. In Proceedings of the 5th International Symposium on Heavy Vehicle Weights and Dimensions, Maroochydore, Australia, 29 March–2 April 1998. [Google Scholar]
- Cebon, D.; Winkler, C.B. Multiple Sensor Weigh-in-Motion: Theory and Experiments; Transportation Research Record, TRB: Washington, DC, USA, 1991. [Google Scholar]
- Cebon, D. Design of Multiple-Sensor Weigh-in-Motion Systems. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 1990, 204, 133–144. [Google Scholar] [CrossRef]
- Gajda, J.; Burnos, P.; Sroka, R. Accuracy Assessment of Weigh-in-Motion Systems for Vehicle’s Direct Enforcement. IEEE Intell. Transp. Syst. Mag. 2018, 10, 88–94. [Google Scholar] [CrossRef]
- Gajda, J.; Sroka, R.; Stencel, M.; Zeglen, T.; Piwowar, P.; Burnos, P.; Marszalek, Z. Design and accuracy assessment of the multi-sensor weigh-in-motion system. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Pisa, Italy, 11–14 May 2015; IEEE/Institute of Electrical and Electronics Engineers Incorporated: Piscataway, NJ, USA, 2015; pp. 1036–1041. [Google Scholar] [CrossRef]
- Zhou, Z.F.; Cai, P.; Chen, R.X. Estimating the axle weight of vehicle in motion based on nonlinear curve-fitting. IET Sci. Meas. Technol. 2007, 1, 185–190. [Google Scholar] [CrossRef]
- Kwon, T.M. Signal processing of piezoelectric weight-in-motion systems. In Proceedings of the Fifth IASTED International Conference on Circuits, Signals and Systems (CSS’07), Banff Alberta, Canada, 2–4 July 2007; ACTA Press: Anaheim, CA, USA, 2007; pp. 25–29. [Google Scholar]
- Ioannou, D.; Huda, W.; Laine, A.F. Circle recognition through a 2D Hough Transform and radius histogramming. Image Vis. Comput. 1999, 17, 15–26. [Google Scholar] [CrossRef]
- ISO 5725-1:2023; Accuracy (Trueness and Precision) of Measurement Methods and Results—Part 1: General Principles and Definitions. International Organization for Standardization: Geneva, Switzerland, 2023.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Truck with Trailer | Truck Without Trailer | Semitrailer | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Speed Bump | Empty | Half-Full | Full | Empty | Half-Full | Full | Empty | Half-Full | Full |
| without | 1 | 2 | 3 | 5 | 5 | 5 | 3 | 5 | 3 |
| 50 cm | 1 | 1 | 1 | 3 | 3 | 3 | 1 | 1 | 1 |
| 100 cm | 1 | 1 | 1 | 3 | 3 | 3 | 1 | 1 | 1 |
| 150 cm | 1 | 2 | 1 | 3 | 3 | 3 | 1 | 1 | 1 |
| gross weigth [kg] | 21,310 | 32,400 | 43,220 | 10,420 | 14,360 | 18,340 | 15,640 | 27,620 | 39,960 |
| Truck with Trailer | Truck Without Trailer | Semitrailer | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Bump | Empty | Half-Full | Full | Empty | Half-Full | Full | Empty | Half-Full | Full | Total |
| without | 0 | 1 | 0 | 5 | 5 | 5 | 1 | 4 | 1 | 22 |
| 150 cm | 0 | 1 | 1 | 0 | 3 | 3 | 0 | 0 | 1 | 9 |
| 150 cm Speed Bump Spcaing | Without Speed Bump | |||||
|---|---|---|---|---|---|---|
| Bias | Scatter | Deviation | Bias | Scatter | Deviation | |
| [kg] | [kg] | [%] | [kg] | [kg] | [%] | |
| uncorrected | 16,801 | 2536 | 60.0 | 97 | 376 | 2.0 |
| corrected | 1273 | 2145 | 15.2 | 308 | 725 | 3.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hagmanns, M.P.M.; Lamberty, S.; Fazekas, A.; Oeser, M. Enhancing Weigh-in-Motion Systems Accuracy by Considering Camera-Captured Wheel Oscillations. Sensors 2024, 24, 8151. https://doi.org/10.3390/s24248151
Hagmanns MPM, Lamberty S, Fazekas A, Oeser M. Enhancing Weigh-in-Motion Systems Accuracy by Considering Camera-Captured Wheel Oscillations. Sensors. 2024; 24(24):8151. https://doi.org/10.3390/s24248151
Chicago/Turabian StyleHagmanns, Moritz P. M., Serge Lamberty, Adrian Fazekas, and Markus Oeser. 2024. "Enhancing Weigh-in-Motion Systems Accuracy by Considering Camera-Captured Wheel Oscillations" Sensors 24, no. 24: 8151. https://doi.org/10.3390/s24248151
APA StyleHagmanns, M. P. M., Lamberty, S., Fazekas, A., & Oeser, M. (2024). Enhancing Weigh-in-Motion Systems Accuracy by Considering Camera-Captured Wheel Oscillations. Sensors, 24(24), 8151. https://doi.org/10.3390/s24248151