1. Introduction
In recent years, developments in the field of camera technology have led to systems capable of capturing scenes not only in spatial resolution, but also optical with spectral resolution. In combination with other imaging principles for non-optical scene features, our environment can even be captured and analysed multimodally. This additional information opens up new possibilities for scene analysis via new multimodal image recognition. This also requires the exploitation of newer ML techniques in order to recognise and use the sometimes hidden information and connections in the scene. Regardless of this, the provision of the most significant primary information possible in the camera data remains an important key to ensuring the efficient analysability of this valuable data source.
Pixel features from spectral reflection, being a material specific characteristic, enable a non-invasive, non-destructive, optical assessment of objects. The ability to detect a wide variety of spectral characteristics is an important source of information for differentiating between materials. Depending on the type and number of materials to be distinguished, a well-chosen set of spectral features can provide a subset of specific information to distinguish between materials.
Spectral imaging can be divided into hyperspectral and multispectral imaging. While hyperspectral imaging acquires hundreds of registered contiguous spectral bands, this type of recording leads to unnecessarily redundant spectral image information [
1]. Meanwhile, multispectral imaging systems acquire only a subset of specific discrete bands of an object spectrum [
1]. Hyperspectral images may contain more information; however, they also require high computational power, and also capture redundant information. Therefore, the usage of multispectral imaging systems can be useful for applications requiring only a small specific portion of the spectral range, since only a smaller, more relevant amount of information can be captured [
2]. Furthermore, the signal quality of the individual channel responses can be significantly improved by the spectrally correlated broadband coverage of a spectral band.
Finding these application-specific spectral bands to distinguish different materials before completely designing the multispectral imaging system is necessary. Therefore, an extensive spectral analysis is performed beforehand. Capturing multispectral images can either be achieved sequentially by changing the spectral vicinity [
3], or by using a snapshot approach with an spatially divided setup for spectral diversity [
4].
One way of sequentially capturing multispectral images is the utilisation of a filter wheel camera system [
5,
6,
7]. A different way of utilising a sequential imaging method is described by Bolton et al. [
3]. The system uses a sequential activation of 13 different LEDs as illumination to image different bands within the visible and near-infrared spectral range. For image acquisition, a monochrome camera is used. Bolton et al. [
3] present a proof of concept based on skin tissue monitoring.
Another way to capture multispectral images is by using a snapshot system [
8,
9,
10,
11]. In [
4], we introduced a system using a tilted linear variable spectral filter and a micro-lens array in front of a common image sensor to distinguish between different continuous spectral bands within one single exposure. In this work, we consider a multi-aperture camera system which utilises distinct different spectral band-pass filters in a snapshot system.
Regardless of whether point sensors or imaging techniques are involved, there are various approaches to optimising the design of multispectral sensor systems for specific applications. In most cases, the aim of optimisation is to maximise the usable sensor information content from the spectral extracts to be generated, taking into account a specific application or general implementation efforts [
12,
13]. On the one hand, the literature attempts to derive optimal spectral system properties (e.g., in [
13,
14]) or to realise the best possible system behaviour by optimisation in a discrete parameter space from the given possibilities and known knowledge about the application [
12], either pursuing a globally optimal result by brute force selection or, in the case of a large selection variety, by evolutionary [
15], randomised methods driven by quality functions. In the first case, the challenge lies in the technological implementation of a spectrally optimised design proposal with subsequent necessary data processing (calibration of the sensor responses) in order to compensate for the effects of unavoidable spectral manufacturing tolerances in the realised integral sensor values [
12]. In the latter approach, generally known data analysis methods (e.g., discriminant analyses [
16] or algebraic decomposition) are used additionally at the sensor response level in order to generate features that are as independent and meaningful as possible for a given application class from a reliably realisable channel selection.
Machine learning (ML) based on such sensor responses enables a wide range of possible uses, including process prediction and optimisation [
17,
18], object classification [
19,
20], error detection [
21,
22], and determining the composition of materials [
23,
24]. For object classification, defect detection, and sorting, visual data such as images can be used. Therefore, with new image acquisition technologies, new possibilities for ML tasks emerge.
However, solving a ML task requires information. This information is preconditioned by the ML task itself. To avoid information redundancy, determining the best setup to capture a dataset according to the ML task requires an extensive preliminary analysis. In ML, this process is called feature selection.
The literature presents different approaches to spectral feature selection. In [
2], multiple supervised and unsupervised methods are compared for spectral band selection, with information entropy and regression tree performing best. In [
25], orthogonal total variation component analysis is used for feature extraction in hyperspectral images. By minimising the optimisation problem, the authors extract only significant features. In [
26], unsupervised PCA-based methods are used for feature extraction. Since PCA transforms the feature space, this method can also be used for feature selection by considering the resulting contribution of features to the principle components. While these references focus on hyperspectral images, a more general overview of feature selection methods is given in [
27,
28]. Both present a generalisation of the feature selection process and evaluation methods. While [
27] focuses on evaluation methods and applications, [
28] concentrates on the methods themselves. In [
28], feature selection methods are classified into filter-based, wrapper-based, and embedded methods, with filter methods not utilising a learning algorithm, wrapper methods evaluating selected feature subsets based on learning algorithm performance, and embedded methods selecting features during the learning process itself.
The modified mutual information presented in [
29] is an example for filter based feature selection methods, using the mutual information itself as a measure of redundancy. A wrapper-based method is presented in [
30]. The authors utilise an ensemble learning algorithm consisting of a decision tree and naive Bayes classifiers. In [
31] a wrapper-based two-stage algorithm is applied to select features for the classification of polycythemia. After a local maximisation stage is used to select a subset of a fixed size, float maximisation is used to vary the selected subset in order to find a better subset. Later, the approach is also combined with a classification algorithm to improve its results further.
In the case of feature selection for the realisation of a multispectral imaging system, no labels are given by prior knowledge. Therefore, the problem at hand is an unsupervised problem, ruling supervised methods out.
The following questions must be answered in order to design a specific multispectral sensor, e.g., a multi-aperture sensor, in line with requirements:
What technology can be used to realise the spectrally selective channels in MSI? What variants are available and what spectral effects are associated with them?
How many spectrally selective channels are actually required; can an optimum compromise be found between optical-technological realisation effort and MSI sensor data usability?
How is the behaviour of the multispectral sensor described for objects of a selected application class?
Which are the best subsets of spectral channels with respect to the primary class separation of a given application class?
What is the best sensor configuration in the context of a machine learning task?
What is the necessary and possible number of usable channels for a sufficiently good multispectral classification?
The transfer of the proposed analysis concept to other multispectral imaging systems enables the sensible utilisation of existing spectral sensor and application data in order to improve suitability for specific applications. This primary image information with maximised information content for the recognition task makes downstream processing methods easier to implement with higher quality. In the case of ML-based evaluation with deep neural models, resource- and inference time-optimised model selection is made possible.
Figure 1 shows the general workflow of the proposed method. The complete process is divided into two major processing steps. First the spectral-MSI-application-specific-sensor configuration is determined, before an extensive ML-based analysis of the proposed configurations is applied.
In the following chapters, the multispectral snapshot sensor is described (
Section 2) and the used data are presented (
Section 3). Afterwards, the proposed process is described in detail in
Section 4, while the ML-based analysis of the determined sensor configurations is described in
Section 5. In the end, the results are presented and raised questions answered (
Section 6), before future works are considered in
Section 7, and a conclusion is given in
Section 8.
2. Multispectral Snapshot Sensor Based on a Multi-Aperture Camera
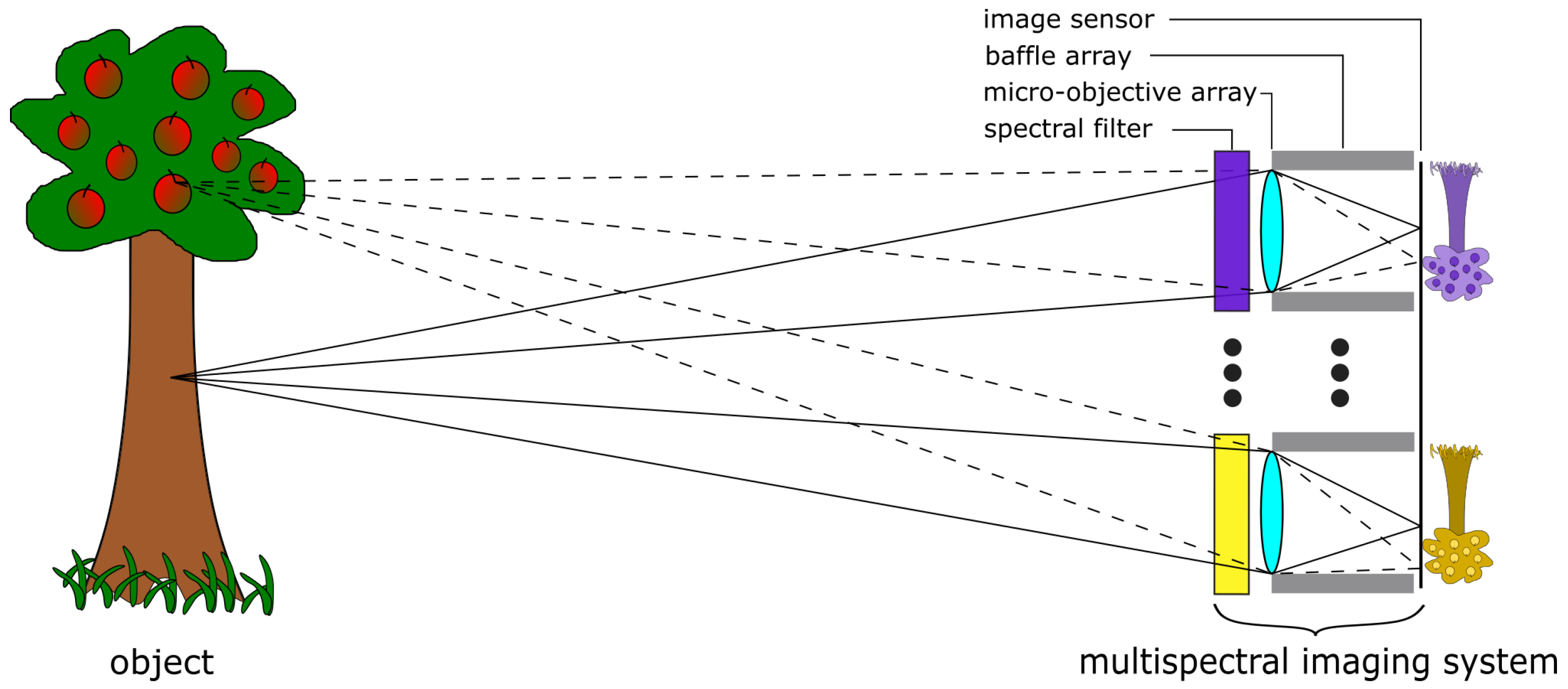
The multispectral snapshot camera is based on a multi-aperture, micro-optical imaging system, in which each individual micro-optical imaging unit, hereinafter referred to as a channel, images the entire object distribution onto a common image sensor (see
Figure 2). The object distance is several times larger than the focal length of each micro objective. In addition, each individual channel is equipped with a spectral filter element either near the systems’s aperture or in or near the image sensor plane, where customised image sensors with tiled filter arrays [
32] or a customised cover glass made of pixelated spectral filters [
33] are required. There are various spectral filter technologies, like linear-variable filters (LVF), band-pass filters (BP), or Fabry–Perót filters, that can be applied to the system. Furthermore, a baffle array is essential for the overall design, which serves as a field aperture to suppress spatial crosstalk between adjacent channels and false light outside the FoV. The physical size of the baffle structures defines the fill-factor, which represents the ratio of the usable tiled image areas to the total size of the image sensor size. This is how the entire spectral data cube is captured in a single shot without an additional bulky objective lens.
2.1. Filter Approaches and Image Sensor Sensitivities
Spectral band-pass filters on a single glass substrate with a varying passband along a single physical direction are referred to as linear variable filters (LVFs). It is beneficial to rotate this filter around the optical axis of the micro-objective array by a specific angle in order to achieve linear spectral sampling across all channels using a monolithic element (see [
4]). The limited gradient of such a continuously varying filter necessitates the use of relatively large image sensor sizes, and the suppression of the blocking range is less effective than that of high-performance single-standard BP filters with steep edges. Such band-pass filters with an optical density (OD) greater than 4 are produced by a prominent optics manufacturer in substantial quantities. However, the BP filters with a narrow passband and broad blocking range over a wide wavelength range require a significant amount of dielectric interference-layer coatings, often comprising up to 100 or more individual layers. This results in total coating heights of 10–20 μm, dependent on the wavelength. The coating technologies that are available in-house were limited to a total layer thickness of approximately 5 μm. A combination of long and short-pass filters on both sides was calculated with relatively small pass bands and high transmission; however, the blocking range was completely insufficient. An alternative approach to the manufacture of narrow band filters is the use of metal interference filters (MIFs) [
34,
35]. The functionality is based on the Fabry–Perót principle, whereby a dielectric low-absorption spacer layer is embedded between two thin, partly transparent metal layers. In addition to the straightforward configuration and the minimal overall layer thickness, the key benefit is the extensive blocking range afforded by the metallic layers and the straightforward wavelength scaling of the passband, which is dependent on the spacer thickness.
Figure 3a illustrates the calculated spectral transmission of the MIF under consideration, comprising a thin metal layer and a dielectric spacer layer, for a wavelength of 1000 nm. The maximum transmission in the passband is lower than that of purely dielectric band-pass filters, due to the absorption of the partly transparent metal layers. The transmission peak observed at approximately 500 nm is attributed to the second interference order and may be mitigated by incorporating an additional long-pass filter on the reverse side of the substrate. Moreover, the bandwidth of the MIF is dependent upon the thickness of the metal layer. It can be observed that an increase in the thickness of the metal layer results in a narrowing of the transmission peak and an improvement in blocking efficacy. However, the maximum transmission peak decreases rapidly. It is necessary to identify a compromise between the quality of the blocking and the height of the transmission in order to optimise the filters. Furthermore,
Figure 3b illustrates the angle of incidence (AOI) behaviour of a MIF at 1200 nm. The transmission profile exhibits a pronounced broadening at large AOI, accompanied by a moderate decline in peak transmission. The maximum wavelength shift is observed to be approximately 30 nm at 20° AOI and approximately 80 nm at 35° AOI.
In addition to the spectral transmission profiles of the MIFs, the image sensor to be utilised in the multispectral multiaperture camera must be selected. Classical CCD or CMOS image sensors operate within a wavelength range of approximately 400 to 1000 nm, with pixel pitches down to approximately 1 μm and a range of sensor resolutions. Photodiodes comprising indium-gallium-arsenide (InGaAs) exhibit sensitivity within the short-wave infrared range, spanning approximately 900 to 1700 nm. By modifying the crystal structure, it is possible to alter the sensitivity range, extending it to higher wavelengths up to 2.2 μm [
36]. In the event that a combination of visible and short-wave infrared wavelength ranges is desired, new image sensors have emerged that utilise a variety of technologies. For example, SWIR Vision Systems, Emberion, Imec, and STMicroelectronics utilise colloidal quantum dot (CQD) thin film photodiodes manufactured monotonically on silicon readout wafers, and Sony applies a combination of compound semiconductor InGaAs photodiodes and silicon readout circuits through a Cu–Cu connection, designated SenSWIR™. The latest CQDs have pixel pitches in the range from 20 down to 5 μm, identical to specifications of SenSWIR image sensors; however, ST Microelectronics have already demonstrated further downscaling to a 1.62 μm pixel pitch [
37]. The image sensor properties of pixel pitch and sensor resolution and the resulting physical sensor size require special attention in the subsequent sensor tiling.
2.2. Micro-Objective Array, Object Scene and Baffle Structures
A micro-objective array consists of one or more stacked micro-lens arrays (MLA), depending on the complexity of the optical design. As previously stated, each individual channel of the micro-objective array within the multispectral MAC images the entire object field on a specific tile of the image sensor. Accordingly, the greater the number of spectral channels used, the lower the spatial resolution of the corresponding channel, and vice versa. Each individual channel generates an image circle. In order to create a rectangular array of image tiles with a high fill factor, the image circles must be confined by a rectangular baffle structure that serves as a field aperture in close proximity to the image sensor. The rectangular array of micro-lenses, with dimensions of , permits only a discrete number of maximum channels, such as , and so forth, if each channel is assigned to a unique spectral wavelength range. The final tiled image ratio is dependent upon the format of the image sensor and the maximum number of channels.
The MLAs are fabricated as polymer-on-glass optics via a suitable mastering technology and a subsequent replication step on a wafer scale, which offers cost-effective elements for large quantities. The mastering process may be either a reflow of photoresist or ultra-precision manufacturing of a metal master. The aforementioned master structures are utilised for the fabrication of replication tools. In comparison to injection molding technologies, one- or double-sided MLAs exhibit precise buried black apertures. However, the achievable shape and sag height of the micro-lenses is restricted, which consequently limits the spatial resolution and f-number of each channel. These size and shape constraints were incorporated into the optical design process. Furthermore, the general object scene was defined, particularly the object field of view with a width of 20 cm due to the intended application (see
Section 3) over a conveyor belt. The objective field of view of a single channel is dependent on the object distance. Assuming a constant object field, a reduction in object distance results in an increase in FoV, and vice versa. The resolution of objects is inversely proportional to the number of channels in an array. Moreover, the resolution of the object size increases with a reduction in the field of view (FoV) at a fixed object distance. The f-number
F/# of each micro-objective is calculated in accordance to classical camera systems
where
f represents the effective focal length and
denotes the entrance pupil diameter of the objective lens. Reduction in the focal length and an increase in the aperture size are the two main techniques used to achieve a small
F/#. However, both of these approaches result in aperture- and field-related aberrations, which must be corrected by the use of several large, thick, and complex lenses. Moreover, the maximum diameter of the largest lens in the system is constrained by the channel pitch of the micro-lenses, as they are not permitted to intersect. Ultimately, the aberrations must be maintained at a minimum to ensure sufficient contrast across the field in the final image, which is dependent on the properties of the image sensor.
Given that the application calls for a multispectral camera, it is necessary to correct chromatic aberrations over a wide wavelength range. The correction of chromatic aberration can be achieved through a number of well-established techniques. One such approach is the design of achromatic or apochromatic lenses using materials with differing Abbe numbers and focal lengths. Alternatively, a hybrid approach may be employed, utilising refractive and diffractive surfaces with opposite dispersion behaviours. However, both of these approaches result in increased system complexity and, consequently, higher costs. A cost-effective solution has been identified in the form of multi-aperture imaging, which uses lenses with adjustable radius of curvature (ROC) for different wavelength ranges. Each channel can be corrected specifically for the desired spectral band, as defined by the filters.
Due to the predominantly short focal lengths of the MLAs, which are only a few millimetres, an issue arises that does not exist in classical objective lenses, such as C-/F-Mount. This issue concerns the thickness of the cover glass and the distance to the actual focal plane array. In the event that the focal length of the micro-objective is less than the distance between the cover glass and the focal plane array, the image will inevitably lack sharpness. Moreover, the cover glass introduces aberrations into the optical system. It can be concluded that image sensors with these properties, such as TEC cooling, are not suitable. The baffle array serves two functions: it acts as a field stop and suppresses unwanted light in neighbouring channels. Therefore, the baffle walls must be thin and positioned close to the focal plane array in order to achieve a high fill factor. Consequently, it would be preferable to choose an image sensor with removable cover glass for the integration of customised micro-optics, which would result in a high fill factor baffle array and fewer aberrations.
2.3. General Dependencies and First Boundary Conditions
Initially, when the spectral filter is positioned in close proximity to the aperture, a spectral shift in the central transmission wavelength is observed, which is dependent solely on the angle of incidence and directly correlated with the field of view (FoV). However, this shift is not affected by the f-number. When non-telecentric imaging optics are used to achieve a high fill factor, the position of the spectral filter close to the focal plane results in an aperture and field-dependent behaviour of the spectral transmission profile. Moreover, the finite thickness of the substrates with MIFs on top introduces additional baffle structure issues for the suppression of out-of-FoV light and alignment issues during the assembly process. Additionally, stray light originating from the reflection of the MIF within the optical system must be considered. In the subsequent stages of the optical design process, the filter is positioned in close proximity to the aperture. Imaging a small field of view per channel reduces spectral dependencies, but only a higher f-number is achievable due to the limited micro-lens diameter size in the array. The fabrication of the baffle structures is also more challenging due to the necessity of thin baffle walls with a high aspect ratio.
The objective is to utilise the so-called butcher block method for the production of the spectral filter array. To this end, MIFs are coated with a low layer thickness gradient over a larger elongated substrate, which results in small variations in the filter characteristics, similar to those observed in a linear variable filter. A lateral resolving spectral measurement of the peak transmission on the substrate is utilised to assign, dice out, and join together individual pieces in a filter array. This method offers the advantage of omitting the lengthy spectral adaptation of narrow band filters on a specific pass wavelength. Additionally, a single coating run is sufficient to manufacture a multitude of spectral graded filters.
The Sony IMX990 image sensor [
38] was selected for further consideration due to its small pixel pitch of 5 μm, its broad sensitive wavelength range (400–1700 nm), and the fact that the image sensor version features a removable cover glass. The image sensor has a 1/2″ format, with 1.34 megapixels at
pixels. A 12-channel system would yield a resolution of approximately 0.11 MP/channel, while a 20-channel system would achieve only 0.067 MP/channel. Given our assumptions regarding object resolution of less than 1 mm/px for a 200 mm wide object field and the constraints on the minimum dimensions of diced spectral filters for assembly and handling, we limited the number of spectral filters to 12 for the MAC.
4. Method for Determining an Application-Related Multispectral System Configuration
The principle of application-related configuration of a multispectral sensor pursued here follows the criteria-driven selection of an amount of S from technologically given, realisable options N. In contrast to the determination of a parametrically spectral simulated and optimised configuration of a given sensor technology, the questions of the fundamental practical feasibility of the results are subsequently eliminated. In addition, there is no need for a fully parametric system model.
The primary data basis here is therefore a max
N-multispectral sensor configuration
, which in this case consists of the combination of sensitivities of the sensor base material
, the optical effect of filter layers to produce
n spectrally selective properties
, and optionally, an illumination source
for observed objects that do not emit radiation themselves. Furthermore, the annotated spectral characteristics of
L objects
to be optically multispectrally detectable are required, which describe the radiation–object interaction of the spectral application data set
. In our specific application case, these are previously measured spectral remissions of different building material classes (see
Section 3 above).
Using a linear model of the multispectral sensor, the measurable
n channelwise sensor responses
can be integrally determined as shown in (
2) and (
3).
In the chosen general approach, the spectral illumination characteristic can be considered both as a system component and as a component of the detected spectral stimulus. In either case, this also determines the channel selection. In order to derive a meaningful subset from a countable set of N possibilities, it is possible to test all existing options. However, due to the combinatorial diversity, this brute force strategy leads to too much effort, even for a manageable N.
For this reason, the proposed algorithm realises a step-by-step, quality factor-driven selection of a by its simulated responses from a possible amount of N. The selection process starts with an initial configuration with only one selected sensor channel . The most important ideas and parameters of the channel selection are defined and the process is described below.
In the case of non-spectrally characterised or characterisable MSI and application class, the following considerations can only be made on the basis of measured sensor responses . However, this requires physically available systems in all variants.
The quality factor of a multispectral system configuration for a given set of application data
is determined primarily on the basis of the sensor responses
or the ratios in the sensor feature space. In our case, it is a specially constructed kind of channel-wise (unimodal) statistic discriminance value
based on [
16] in the case of a set of
object classes (see (
4)). It describes the distinguishability of statistically moment-based described class ranges. Ideally, the discriminance value assumes the value infinity.
Here, is the mean sensor response of channel for the data class, c and characterises its standard distribution.
On this basis, a simple selection of sensor channels could be made from the largest sorted sequence of amount N of the channel-related discriminant values. This procedure realises a worst-case, i.e., without taking sensor feature correlations into account, selection by the best possible evaluation ratio in the sensor feature space.
Alternatively, a formal vectorial extension for a given multispectral configuration
is possible by replacing the rational expression in Equation (
4) with the so-called Mahalanobi distance
value of class pairs.
is the covariance matrix, the scattering behaviour in a multidimensional feature space of dimension
S. This type of multidimensional class spacing assessment is recommended, but this evaluation requires much computational effort.
In addition to the differentiability of class ranges in the sensor feature space, the overall correlation of the sensor responses is another optimisation criterion that determines the usability of a feature space.
Therefore, we add another criteria to control the selection of sensor channels. This is called the Mutual multispectral Channel Correlation Ratio (MmCCR). The multidimensional character of the feature space realised by the sensor and the application data set is taken into account here.
Useful for
are statistical or geometric scalar measures to formally evaluate the independence of vector sets. In our study, the normalised vector covariance is used as a representative of statistical measures or, alternatively, the vector cosine distance. Both focus on the ratio differences of the vector components to be evaluated and not on the absolute vector values and are therefore very robust in the application.
With the help of the evaluation in (
6), it is possible to find the most suitable addition of a further channel to a given multispectral sensor configuration with
channels from the remaining
-sorted channel options. The evaluation in this paper uses the vector covariance. The cosine distance is particularly effective for larger amounts of data. Both correlation evaluations are sufficiently independent of global scaling of the sensor responses, e.g., due to different systematic modulations of the multispectral sensor responses as a result of exposure time or scene illumination.
In addition to the general feature space-based channel selection criteria described above, further spectral technological factors can be included in the procedure. In this way, in addition to the specific quality of the sensor data, properties of the technical realisation and the application implementation are also taken into account.
For example, channels that are overlapping, i.e., technologically redundant, in terms of their spectral characteristics can be excluded from a remaining selection set before each supplementation step. In addition, known primary tolerances of the spectral channel properties, e.g., of certain optical filter principles, can already be taken into account in the selection step. In this way, channel proposals can be evaluated in terms of their contribution to the system calibration effort in the real application.
From this point of view, the present implementation is specialised for the multi-aperture imaging system from
Section 2. However, the method proposed can be applied to any type of multispectral sensor system whose behaviour can be described either spectrally or by measurements.
5. ML-Based Analysis of Sensor Configurations
Based on the feature-channel priority ranking and system specific criteria such as implementation effort, technical availability or quality standards, multiple subsets can occur. Each of these subsets represent a different possible sensor configuration. In the case of multispectral imaging systems. the cost of spectral filters can be a factor, as well as their availability. Moreover, a quality-driven criteria, such as a required minimum performance, in combination with technical aspects, like higher lateral transmission modes of spectral filters, can also result in multiple subsets. By either blocking or not blocking these transmission modes the performance can be influenced, since information are either present or absent. However, blocking also creates additional technical-optical efforts. To compare all subgroups based on ML performance, a machine learning driven data analysis is used. First, data are generated by applying Equation (
2) for each subset, setting all optical and sensor terms accordingly to match the subset conditions, while using the fixed object reflectivity. This results in different datasets, again representing different possible sensor configurations.
Utilising these simulated sensor response data, each sensor configuration can be compared based on performance of a ML classification algorithm, using each subset, respectively, to train said algorithm. However, ML classification algorithms require a set of hyperparameters to define the training process, with each set of hyperparameters being unique in terms of data–classifier combination. Depending on the set of hyperparameters, the classifier’s performance can vary. Therefore, the next step in the ML-based analysis is the determination of the best sets of hyperparameters corresponding to each subset. Utilising a grid search approach, the accuracy of the classifier is maximised. Since this process results in many training steps, support vector machines (SVM) [
40] were chosen due to their robustness and fast training times. It is still a very powerful, classic classification principle in the field of pattern recognition. To determine the best fitting kernel for further SVM investigation, both the polynomial kernel and radial bias function (RBF) kernel were used in preliminary investigations. While the best performance of the RBF kernel peaked at
, the polynomial kernel peaked at a
classification rate. Therefore, a polynomial kernel was used in further investigations. To compare the ranking algorithm to a benchmark, a third subset was created based on an equidistant distribution of filter within the considered spectral range. Since lateral features are used for this evaluation, other classification methods such as flat neural neural networks, decision trees, and so on could also be used instead of SVM. Therefore, the used classification algorithm is interchangeable.
To find the necessary number of usable spectral channels, a SVM is trained using the best set of hyperparameters, as determined before. Starting with all spectral bands, the SVM is trained sequentially, while after one training the last ranking feature is removed until only the highest-ranked feature remains. A five-fold cross-validation is used again. In case of saturation of performance after adding another channel, one of two possibilities arise. Either there is no new information included in the newly added data, or the information from the newly added data is irrelevant for class separation. In both cases, the channel does not contribute to a better class separation, and is therefore redundant. By finding this saturation, the minimum necessary number of channels for spectral information-based class separation is found. Combining all results allows one to determine the best application-specific realisation of the presented Multi-Aperture based Snapshot-Imaging System.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}