1. Introduction
Robot localization plays a critical role in achieving the autonomy, reliability, and efficiency of robots, which are essential for their widespread applications across various domains. The primary methods for robot localization encompass technologies such as Global Positioning Systems (GPS) [
1], Inertial Navigation Systems (INS), visual sensors [
2], and LiDAR (Light Detection and Ranging) [
3]. Traditional GPS exhibits certain deficiencies in providing attitude estimation owing to issues such as multipath effects and delay, thereby limiting its application within indoor environments [
4]. In recent years, extensive research has been conducted in the realm of attitude estimation based on Inertial Navigation Systems (INS) and visual sensors. INS employs the integration of acceleration and angular velocity to estimate attitude information. However, the presence of biases and noise in inertial sensors result in the predicament of accumulated error in estimation [
5]. Visual sensors offer robust and accurate motion estimation, but they remain susceptible to the influence of ambient lighting conditions [
6]. In contrast, LiDAR, as an active sensor, measures obstacles in the environment by emitting laser pulses and recording the time taken for the reflected pulses to return. This generates detailed point cloud data that can be used to construct high-precision maps of the environment, aiding robots in tasks such as localization, navigation, and obstacle avoidance [
7,
8]. With its high accuracy, stability, and long-range sensing capabilities, LiDAR has established itself as a key technology in fields such as autonomous driving, unmanned aerial vehicles, and robotics.
LiDAR-based localization algorithms analyze and process continuous point cloud data to provide real-time position information and environmental modeling for robots or vehicles. These algorithms ensure autonomous navigation in complex environments. Point cloud registration (often referred to as scan matching) is one of the core steps in achieving robot localization and navigation. Its main task is to accurately align point clouds acquired at different times or locations, mapping them to a unified coordinate system to extract the robot’s trajectory information and environmental details.
In the actual process of point cloud registration, the first step is to establish associations between points or cells in consecutive LiDAR scan frames. This involves identifying corresponding elements between two sets of point clouds. Then, a cost function is constructed to describe the error or matching quality between the point clouds. Common cost functions include minimizing the distance between points, the distance between feature points, or the similarity between distributions. Finally, optimization techniques, such as gradient descent, least squares, or advanced nonlinear optimization methods, are used to estimate the relative pose transformation matrix between the point clouds. Through these steps, the robot can continuously update its precise position within the environment, ensuring precise localization for autonomous navigation and effective obstacle avoidance.
In the research and application of LiDAR point cloud registration, registration methods are generally divided into three categories: point-based registration, feature-based registration, and distribution-based registration.
Point-based registration methods directly utilize the raw point data in the point cloud, aligning the point clouds by identifying corresponding points between two sets of point clouds and minimizing their Euclidean distance or other geometric errors. The classic Iterative Closest Point (ICP) algorithm [
9] is a representative of this approach. ICP iteratively identifies the closest point pairs and calculates the rigid transformation between the point clouds. However, ICP assumes that the closest point pairs are always correctly matched, an assumption that often fails in real-world applications. In complex environments, the presence of noise, outliers, or sparse data can significantly reduce the algorithm’s accuracy. Additionally, ICP’s computational cost is high due to the exhaustive search for point correspondences, making it less efficient when processing large-scale point clouds.
Unlike point-based methods, feature-based registration methods perform registration by extracting distinctive geometric features from the point cloud, such as corners, edges, and planes [
10,
11]. These methods are more robust when dealing with sparse point clouds or occlusions compared to directly processing all points. Even in scenarios with missing or incomplete data, feature points can still facilitate effective alignment. However, the success of feature-based methods heavily depends on the precision of feature extraction, as inaccuracies in the extracted features can significantly affect the final registration outcome. These methods are particularly well-suited for environments with stable geometric characteristics and can deliver reliable matching performance across varying viewpoints.
Distribution-based registration methods treat the point cloud as a probability distribution in continuous space and use probability density functions for alignment. The Normal Distributions Transform (NDT) [
12] is a typical representative of this approach. NDT divides the point cloud into a regular grid of cells and uses normal distributions to describe the distribution of points within each cell. Compared to ICP, NDT demonstrates faster registration speed and greater robustness when handling large-scale scenes, particularly in large-scale environments with noise or extensive point cloud data [
13]. However, NDT may introduce discontinuities at the boundaries of the grid cells.
The size of the cells is predefined by the user and typically selected based on application requirements and environmental characteristics. Determining the optimal cell size requires estimating data through multiple experiments to achieve relatively superior registration results. The size of the cells determines the resolution of the NDT model. When the cell size is set too large, it fails to reflect the features of the point cloud accurately. Conversely, overly small cell sizes make the algorithm more vulnerable to noise from LiDAR scanning equipment, which can degrade performance. Furthermore, point cloud data collected in different environments require different optimal cell resolutions. In some cases, insufficient data within a grid cell can prevent the calculation of a reliable Gaussian distribution. Therefore, grid resolution is a crucial parameter that directly affects the algorithm’s accuracy. To address the challenge of determining optimal cell parameters, researchers have proposed multi-resolution NDT. While this approach enhances adaptability, it also substantially increases the computational complexity and load of the algorithm in practical applications.
Moreover, traditional cell-based methods often struggle to extract critical features from the original point cloud data, especially at the intersections of two planes where the normal vector of the point cloud undergoes abrupt changes. Due to the uniform cell division in point cloud space, the point cloud at the intersection is likely to be assigned to the same cell block. However, features such as the cell mean or covariance extracted through traditional NDT may not adequately describe the point cloud features at these locations, which can significantly affect the accuracy of point cloud matching algorithms. Therefore, the selection and division of cell size play a vital role in the accuracy and robustness of the NDT algorithm.
To address the challenges of irrational cell subdivision and distortion in NDT, this paper proposes a novel registration algorithm based on cluster segmentation. It integrates considerations of point cloud shape, segmenting the reference frame’s point cloud into linear clusters. Adaptive cell partitioning is executed based on point cloud size. The improved Density-Based Spatial Clustering of Applications with Noise (DBSCAN) algorithm is incorporated for denoising and clustering the reference frame’s point cloud. Singular Value Decomposition (SVD) is also employed to partition the point cloud into linear shapes, followed by the determination of cell lengths based on point cloud size. To ensure finer granularity, excessively large cells are further subdivided into overlapping smaller cells. Ultimately, optimization of the objective function for all matched items is achieved through Gaussian distribution functions resulting from the dual cell partitioning. Compared to classical registration algorithms like ICP and NDT, the proposed method demonstrates superior robustness, precision, and matching efficiency.
In summary, the primary contributions of this paper encompass the following aspects:
(1) An innovative method is introduced for adaptively setting DBSCAN parameters based on local point cloud density. By calculating the average nearest-neighbor distance, it enhances the clustering’s robustness and adaptability across a wide range of environmental conditions.
(2) An innovative approach based on density clustering for local point cloud feature clustering is proposed. This approach facilitates the segmentation of point clouds into linear clusters and thereby establishes a foundation for the generation of adaptive grid cells within the algorithm.
(3) A novel strategy for NDT cell partitioning is proposed. In this method, NDT cells are adaptively generated based on the size of linear point cloud clusters, and the decision to continue dividing is adjusted by the cell’s length. This two-layer cell structure serves distinct roles in the optimization phase: the first layer of cells enhances the algorithm’s matching range, while the second layer improves its accuracy.
The structure of this paper is as follows:
Section 2 reviews related works on NDT-based point cloud registration.
Section 3 elucidates the fundamental process of NDT, highlighting the deficiencies in NDT algorithms.
Section 4 expounds extensively on the proposed approach.
Section 5 demonstrates the experimental comparison results.
Section 6 gives the discussion. Lastly,
Section 7 summarizes the contents of this paper.
2. Related Work
The NDT methodology was first introduced by Bieber et al. in 2003, and extended to three dimensions by Martin Magnusson in 2009 [
14]. NDT utilizes lidar scan points as input and matches them to target points through potential probability conditions. Typically, reference point clouds are subdivided into uniformly sized cells, a step referred to as cellization. Subsequently, the mean and covariance of each cell are computed, and an optimization objective is solved for each scan point and its corresponding cell. The computational efficiency of NDT is closely tied to the number of target cells, which can be controlled by adjusting the size of the subdivided cells. The original approach can also be viewed as a point-to-distribution (P2D) method, as it directly matches scan points with the probabilistic distribution of unitized objectives. Later, Stoyanov applied probabilistic methods to scan and target points to enhance registration speed [
15].
The cell partitioning within the NDT algorithm stands as a pivotal step impacting robustness, matching precision, and operational efficiency. Researchers have made various enhancements to this step. Cihan et al. developed the ML-NDT algorithm [
16], which substitutes a leave function for the Gaussian probability density function as the scoring function and optimizes the score function using Newton and Levenberg–Marquardt methods. This approach divides point clouds into 8n cells (where n represents the number of layers) to enhance matching precision but concurrently increases computational complexity. Das et al. proposed the multi-scale k-means NDT (MSkM-NDT) approach [
17], addressing the discontinuity issue in the NDT cost function through multi-scale optimization and k-means-based point cloud segmentation. However, multi-scale optimization prolongs convergence time, and k-means-based point cloud segmentation struggles with accuracy when cluster numbers are unknown. Additionally, the scholars introduced the Segmented Region Growing NDT (SRG-NDT) approach [
18], first removing the ground plane and then using a region-growing algorithm for clustering the remaining points to enhance computational speed. Lu et al. proposed a variable cell size NDT algorithm [
19], aiming to improve accuracy but demonstrating limited effectiveness with sparse point clouds. Liu et al. introduced the Composite Clustering NDT (CCNDT) method [
20], which employs clustering points to calculate probability distributions and employs DBSCAN and k-means clustering algorithms for grid partitioning, replacing constant grid size. However, for complex point clouds, this method struggles to maintain the continuity and local features of objective points. Hong et al. tackled the issue of discontinuity caused by the discretization of regular cells in NDT by introducing an interpolation method based on overlapping regular cells. They applied this method to point-to-distribution NDT registration (NDT-P2D) [
21].
In addition to refining grid cell partitioning, researchers have explored integrating other information into the pose estimation process to enhance matching accuracy. Andreasson et al. extended cost constraints by incorporating pose information into the NDT-D2D (Distribution to Distribution) method [
22]. Liu et al. proposed an improved NDT algorithm, termed INDT, which employs only pre-processed feature points for matching [
23]. This method employs Fast Point Feature Histogram (FPFH) descriptors and the Hausdorff distance method to extract feature points and enhance precision using a hybrid Probability Density Function (PDF). ParkG et al. introduced a novel pose estimation scheme [
24], wherein vertices and corners are extracted from 2D lidar scan point clouds within the NDT framework, enhancing efficiency and performance. Shi et al. introduced an algorithm called NDT-ICP, sequentially combining and operating NDT and ICP. This bifurcates the matching process into two stages: NDT for coarse registration, followed by ICP for fine alignment. This hybrid mechanism significantly improves NDT’s registration performance [
25,
26]. Chiang et al. addressed the initialization issue of NDT by proposing two strategies: combining an inertial navigation system with a global navigation satellite system, and processing point clouds in each partitioned scanning area based on density ratios [
27].
Currently, researchers typically prioritize precision over operational efficiency when performing cell subdividing within the NDT algorithm. The approach generally involves point cloud segmentation, which is effective but necessitates precise segmentation of point clouds, leaving room for improvement. Furthermore, while enhancing matching accuracy through the addition of extra information is feasible, it inevitably increases the computational burden. Therefore, to address the current research gaps, this paper aims to achieve accurate point cloud registration results swiftly and robustly.
3. Preliminaries
The conventional NDT algorithm can be delineated into three primary steps. Initially, the reference point cloud undergoes uniform subdividing into equal-sized cells . If the cell contains more than two points, the following procedures are carried out:
(1) Identification of points within each grid cell .
(2) Calculate the mean
of points within each cell as follows:
(3) Compute the covariance matrix for the points within each cell as follows:
The Gaussian distribution
can model the distribution of points within a grid cell, and the Probability Density Function (PDF)
is represented by
where
represents a point within the current scan
and
signifies the probability of
being contained within a cell characterized by a Gaussian distribution.
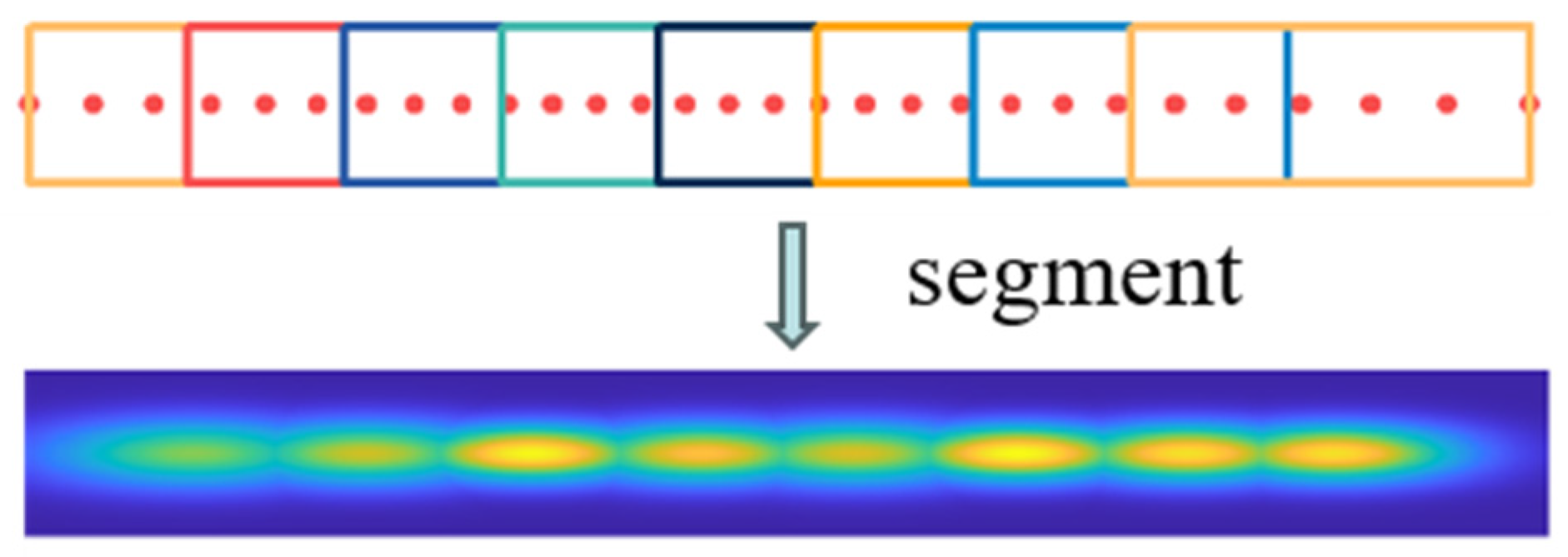
Similar to an occupancy grid, NDT establishes a grid of regular subdivisions. However, in contrast to occupancy grids that denote the probability of cell occupancy, NDT’s cell grid signifies the probability distribution of point clouds within each individual cell. Typically, a cell grid of dimensions 1 m × 1 m is conventionally adopted. This approach describes a plane in a segmented, continuous, and differentiable manner using the form of probability density.
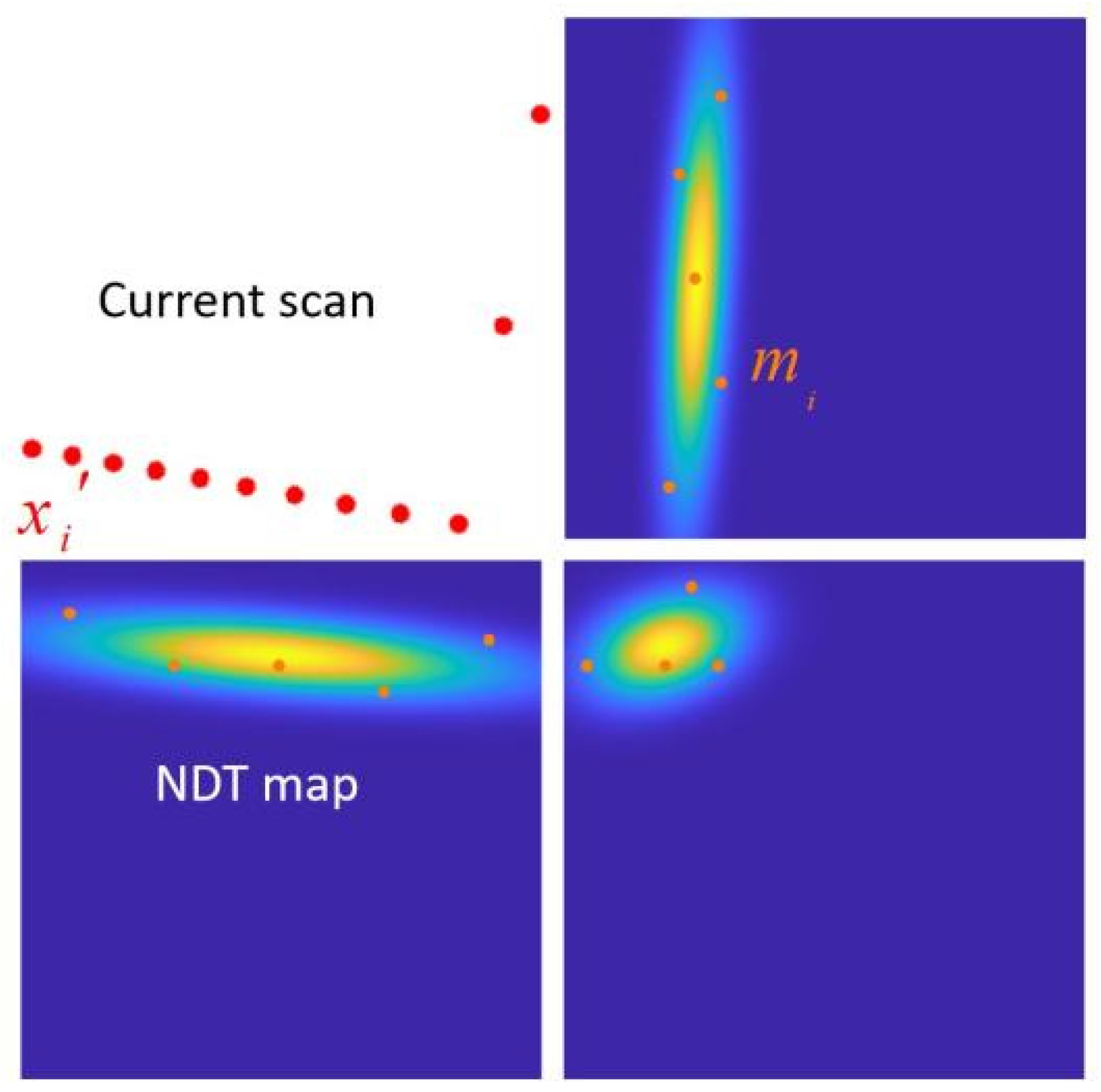
Figure 1 visualizes the PDF within each grid cell, commonly referred to as the NDT map.
The subsequent step following grid partitioning is the registration process, which proceeds as follows:
(1) Construct the NDT map of the reference point cloud.
(2) Initiate parameter estimates, which can be initialized with zero values or odometry data.
(3) Transform each point using the transformation matrix to obtain the corresponding mapped point , as described by Equation (5).
(4) Identify the corresponding Gaussian distribution grid cell for each mapped point .
(5) Calculate the score for each mapped point by computing their scores and summing the results, determining the score for the parameters, as outlined in Equations (6) and (7).
(6) Iterate to calculate a new parameter estimate by attempting to optimize the obtained scores.
(7) Return to step (3) and iterate through the process until the convergence criterion is satisfied.
This stepwise procedure illustrates the sequence of operations involved in the registration process, ultimately aligning the current scan with the reference point cloud using the NDT framework.
where
signifies the transformation matrix,
elucidates translation, and
delineates the inter-frame rotation.
The final step involves optimizing the score
by calculating the gradient
and the Hessian matrix
of
. An optimization algorithm is employed to enhance the transformation parameter
, solving the following equation iteratively at each iteration as follows:
Compared to the ICP algorithm, the NDT algorithm demonstrates enhanced robustness and lower computational demands. These advantages stem from the NDT algorithm’s utilization of a set of local Gaussian distributions to model the distribution of scanned point clouds. Traditional NDT algorithms subdivide the initial scan into evenly sized grid cells in a regular manner and employ four overlapping grids to minimize the effects of discretization, allowing for an accurate representation of the point cloud distribution within the initial scan. However, directly partitioning point cloud data into uniformly sized and closely connected cells without considering the actual shape of the point cloud can obscure the local distribution features of the point cloud. Consequently, the NDT algorithm faces challenges in adapting to abrupt variations in local point cloud distributions. Its accuracy is also limited by the fixed cell size, especially near corners and gaps in the point cloud.
Figure 1 illustrates an example of an NDT map, with different point clouds within distinct cells depicted in various colors. The outermost shape in the figure is an enlarged version of the NDT map, which displays a visualization of the probability density function of the point cloud within each cell. A higher probability density indicates brighter, denser portions of the observed point clouds. From the figure, it is apparent that the probability density distribution within grid cells containing corner points is less focused, indicating the NDT map’s inability to precisely capture the shape features of the point cloud at those locations. Additionally, the top-left cell is discarded due to the scarcity of points, rendering it unable to form an NDT map and leading to the loss of local point cloud information. Moreover, considering the use of four overlapping grids, representing a 2.5 m × 2.5 m point cloud as an NDT map requires 48 1 m × 1 m grid cells, thereby increasing the overhead in terms of storage space and optimization time.
A fixed grid partitioning not only diminishes the algorithm’s precision but also impacts its robustness. In the fourth step of the NDT algorithm, determining the corresponding Gaussian distribution grid cell for each mapped point
, most mapped points can accurately fall within their respective grid cells when the positions of the two-point cloud frames are similar. However, in real-world applications, point cloud frames often differ significantly in position and shape. This discrepancy can result in mapped points falling outside the boundaries of the NDT map or being erroneously assigned to incorrect grid cells. This situation can lead the algorithm into local optima, resulting in an incorrect estimation of the transformation matrix. While increasing the size of grid cells can alleviate this problem, larger grid cells, when transformed into Gaussian distributions, may lose more local distribution characteristics.
Figure 2 illustrates a scenario where the current point cloud is mapped to the NDT map. The red points represent mapped points
, while the NDT map is formed by the orange reference point cloud
. Several mapped points fall into blank areas, where they are effectively discarded, contributing no useful information to the subsequent optimization process. This phenomenon underscores the challenge of balancing grid size for accurate mapping and capturing local distribution details within the NDT algorithm.
4. Method
To overcome the challenges of distortion and erroneous mapping in NDT maps caused by fixed cell partitioning, this paper introduces a novel approach for grid cell subdivision. This method optimizes the use of grid cells, requiring fewer subdivisions while offering a more accurate representation of the point cloud distribution. By doing so, it significantly enhances the accuracy, robustness, and operational efficiency of point cloud registration. Compared to traditional methods employing quadruple-overlapping grids, the proposed approach notably reduces computational complexity.
4.1. Point Cloud Clustering and Segmentation
This work initiates with an enhancement of the DBSCAN clustering algorithm, incorporating a discriminative mechanism during the cluster expansion phase to acquire linear point cloud clusters. The improved algorithm is referred to as L-DBSCAN. It is applied to cluster the input reference scans , facilitating the segmentation of point clouds into linear point cloud clusters and thereby providing a precise foundation for subsequent cell generation.
DBSCAN, a density-based spatial clustering algorithm, proves instrumental in identifying clusters of arbitrary shapes within spatial databases that may contain noise. The algorithm proceeds as follows:
- (1)
Begin by arbitrarily selecting a data point and identifying all data points within a distance of from this point. If the count of these data points is less than (a specified numerical threshold), label the point as noise. If the count is greater than or equal to , mark the point as a core sample and assign a new cluster label .
- (2)
Proceed to visit all neighbors of the core sample within a distance of eps. If a neighbor has not been assigned a cluster label, allocate it to and continue expanding the cluster. If the neighbor is also a core sample, recursively visit its neighbors until no more core samples are within the eps distance.
- (3)
Select another unvisited data point and repeat the above steps until all data points have been visited.
The DBSCAN algorithm relies on two critical parameters: the neighborhood radius () and the specified minimum number of samples (). The selection of these parameters significantly influences the clustering outcome. A smaller value of will lead to the discovery of more clusters, whereas a larger value of will require a greater number of core samples to form a cluster. Through this density-based clustering approach, DBSCAN exhibits flexibility in identifying clusters of arbitrary shapes and demonstrates a certain degree of robustness when dealing with noisy data.
Generally, the parameters of the DBSCAN algorithm, such as the neighborhood radius and minimum sample size, are typically adjusted empirically. However, these empirical rules often fail to adapt to the variations in different point cloud datasets, especially when the datasets have varying densities or complex geometric features. Improper parameter settings can lead to over-clustering or under-clustering, which may negatively impact the final clustering results. To address this, this paper introduces an adaptive neighborhood calculation method for point cloud data, dynamically adjusting the neighborhood radius and minimum sample size based on the local distribution of each point. Specifically, the neighborhood radius is determined by calculating the average distance of the nearest points for each point, and the minimum sample size is determined based on the point density within the neighborhood. This approach enables DBSCAN to perform more adaptively and robustly across diverse datasets and environments.
The approach can be detailed through the following steps:
(1) Calculate the distances to the nearest neighbors for each point: For each point in the point cloud, calculate the distances to all other points in the cloud. The nearest neighbors are selected based on the smallest distances.
(2) Compute the average distance
: Once the
nearest neighbors are identified for each point, calculate the average of these distances as follows:
where distance
is the Euclidean distance between point
and its
-th nearest neighbor.
(3) Determine the neighborhood radius: Set the neighborhood radius to
, ensuring that the radius is large enough to cover the local neighborhood of each point as follows:
(4) Set the minimum sample size: The minimum number of points within this radius (density threshold) is determined as half of
, to balance computational efficiency and the robustness of clustering as follows:
where
is chosen as 8 to maintain computational efficiency while ensuring that the density is sufficiently large to guarantee reliability.
This method dynamically adjusts the parameters based on the local point cloud distribution, allowing for more adaptable and stable clustering in various environments and datasets.
Figure 3 illustrates a clustering example of DBSCAN, where
. In this figure, point A and other red points are considered core points as their neighborhood (represented by red circles) contains at least 4 points, including themselves. Being mutually reachable, they form a cluster. Although points B and C are not core points, they are reachable through core point A and other core points, making them part of the same cluster. Point N is classified as a noise point since it is neither a core point nor reachable from other points.
For the CSNDT algorithm, the objective is to obtain straight-line point cloud clusters. While the traditional DBSCAN algorithm performs well in clustering point clouds of arbitrary shapes, adjustments are necessary for the CSNDT algorithm to meet its specific requirements. Specifically, a judgment mechanism is proposed during the clustering process of DBSCAN for CSNDT. When a core sample is added to cluster
, this judgment mechanism is triggered, and it calculates the covariance matrix
and correlation coefficient
for points within
, including the newly added core sample. The corresponding calculation equations are as follows:
where
denote the
x-axis and
y-axis coordinates of the two-dimensional point cloud, respectively,
represent the means, and
stand for the standard deviations. The coefficient of correlation, denoted as
, reflects the degree of closeness in correlation between the x and y coordinates of the point cloud. As
increases, it signifies a higher correlation between the
x and
y axes, thereby indicating a tendency for the point cloud cluster to be more linear. However, in cases where the point cloud cluster is oriented vertically or horizontally, even if the cluster appears linear, the coefficient of correlation
might still be relatively small. To address this limitation, a secondary criterion is introduced: the standard deviation. This metric assesses the concentration of the point cloud along the
x or
y direction, with smaller standard deviation values indicating higher concentration and greater linearity. Consequently, two threshold values have been established to evaluate the suitability of newly incorporated points. The specific rules for assessment are outlined as follows:
where
and
represent the thresholds for the coefficient of correlation and the standard deviation, respectively. When a newly added point satisfies either of these two thresholds, it will be categorized into the same cluster.
4.2. Adaptive Generating and Segmenting of Cells
Adaptive grid cells can be generated through linear point cloud clusters. Initially, the mean and covariance of each point cloud cluster
are computed. Based on the size and location of
, initial cells are adaptively generated, determining the boundaries
of the grid cells and calculating their lengths
. Subsequently, an assessment is conducted to determine whether
exceeds a predefined length threshold
. If this is the case, the initial cell is further subdivided into overlapping smaller cells. The mathematical representation of this process is as follows:
where
represent the boundaries of function
, which are influenced by the maximum and minimum values of coordinates along the
x and
y axes within the point cloud cluster
.
During the initial cell subdivision process, as the point cloud clusters are segmented into straight lines, the width of the original cell boundaries tends to be narrow. To enhance the likelihood of mapping points falling within the cells and to broaden the scope of point cloud registration, these boundaries are expanded. Regarding the segmentation of the initial cells, it is used in the second optimization-solving phase, with initial values derived from the first optimization-solving phase. When more precise initial values are available, we employ either the boundaries
or slightly expanded boundaries. By employing the L-DBSCAN algorithm for point cloud clustering and segmentation, we attain a CSNDT map as depicted in
Figure 4. Distinct point cloud clusters are represented with varying colors, revealing the segmentation of the point cloud into five straight clusters with adaptive cell subdivision. In contrast to conventional NDT algorithms, the CSNDT approach employs a reduced count of grid cells, significantly mitigating storage space requirements and potential time overhead in subsequent optimization-solving phases. Furthermore, the probability density within the CSNDT map is more densely concentrated within the central map region, thereby augmenting the accuracy of mapping points precisely aligned with their respective NDT maps. These enhancements collectively contribute to elevating the precision and robustness of point cloud registration.
Figure 5 illustrates the situation where the initial cells with lengths exceeding the threshold are segmented.
The initialized transformation matrix should be applied to each point to acquire its corresponding mapped point . Based on the generation of initial cells, the associated Gaussian distribution grid cell can be determined for in order for the first optimization-solving iteration to proceed. The outcomes of the first optimization-solving iteration can be transmitted to the second iteration, followed by determining the pertinent Gaussian distribution grid cell based on the segmentation of initial cells and continuing the optimization process.
Algorithm 1 provides a concise overview of the workflow for the CSNDT algorithm. The input consists of the reference point cloud
, utilized to construct the NDT map, and the current point cloud
, which necessitates matching. The algorithm’s output is the transformation matrix
that facilitates the successful alignment of the two-point clouds.
| Algorithm 1. CSNDT |
| Input: |
| : Current scan |
| : Reference scan |
| Output: |
| : Transform parameter |
| 1: | {Initialization:} |
| 2: | ← L-DBSCAN |
| 3: | For all Point cloud cluster do |
| 4: | all points in |
| 5: | |
| 6: | |
| 7: | |
| 8: | If do segmentation |
| 9: | For all small Point cloud cluster do |
| 10: | all points in |
| 11: | |
| 12: | |
| 13: | End for |
| 14: | End if |
| 15: | End for |
| 16: | {First Registration:} |
| 17: | While not converged do |
| 18: | |
| 19: | For all points do |
| 20: | Find the cell that contains |
| 21: | |
| 22: | Update |
| 23: | End for |
| 24: | Solve |
| 25: | |
| 26: | End while |
| 27: | {Second Registration:} |
| 28: | While not converged do |
| 29: | |
| 30: | For all points do |
| 31: | Find the cell that contains |
| 32: | |
| 33: | Update |
| 34: | End for |
| 35: | Solve |
| 36: | |
| 37: | End while |
6. Discussion
The improved DBSCAN clustering algorithm demonstrates significant advantages when processing reference point clouds, effectively segmenting them into point cloud clusters with clearly defined linear features. However, its clustering performance is influenced by multiple key parameters, including the neighborhood radius (Epsilon), the minimum sample size (MinPts), the correlation coefficient threshold, and the standard deviation threshold. Each parameter has a significant impact on the clustering outcome. Due to the diversity of LiDAR data and the differences in point cloud features across various application scenarios, these parameters cannot be universally applied and must be adjusted flexibly based on the specific operational conditions of the LiDAR (such as scanning angle and resolution) as well as the actual environment in which the robot operates (such as outdoor, indoor, or dynamic scenes) to achieve optimal clustering results.
Furthermore, the method proposed in this paper demonstrates remarkable robustness, enabling the segmentation of point cloud data into linear point cloud clusters of varying sizes. This segmentation capability is particularly suitable for extracting linear features in structured environments, such as indoor corridors and urban streets. In these settings, elements like walls, curbs, and buildings exhibit distinct linear boundaries that can be distinctly segmented by this algorithm. Moreover, the method also shows strong adaptability to obstacles with slight curvature, such as gently curved walls or rounded edges, because small curvature curves can be approximated by combining multiple straight lines, forming continuous linear clusters.
However, in more complex environments, particularly those with obstacles characterized by significant curvature, the limitations of the method become apparent. For example, objects like thin rods that exhibit significant curvature may be incorrectly identified as isolated noise, resulting in the loss of important information. This occurs because the nature of linear fitting limits the effective handling of non-linear structures with large curvature. Consequently, the assessment of linearity in point cloud clusters may erase the features of these large curvature objects. To overcome this challenge, it is essential to develop advanced curve clustering and segmentation algorithms capable of effectively handling large curvature features. Additionally, incorporating more adaptable point-mapping scoring mechanisms can facilitate precise analysis and processing of point cloud data across varied environments. These improvements would not only enhance the accuracy of point cloud segmentation but also significantly bolster the algorithm’s adaptability to complex and dynamic scenarios.
Currently, the proposed improved algorithm has only been tested and validated in a two-dimensional point cloud environment, leaving its applicability in three-dimensional point cloud scenarios yet to be thoroughly examined. While point cloud processing in two-dimensional settings is relatively straightforward, the transition to three-dimensional environments introduces significantly greater complexity due to the richer spatial information and intricate structural features present in 3D data. Expanding the algorithm’s capabilities to three-dimensional environments represents a challenging yet highly promising avenue for future research. This endeavor should prioritize optimizing the algorithm for 3D point cloud processing, enabling the effective segmentation of planar and surface features within three-dimensional space. Furthermore, the development of adaptive voxel generation techniques will be crucial to accommodate the additional dimensionality and complexity. Such advancements would offer more precise and efficient solutions, particularly in applications like robotic localization and environmental perception, paving the way for enhanced performance in real-world scenarios.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}