
Addressing the Return Visit Challenge in Autonomous Flying Ad Hoc Networks Linked to a Central Station

Abstract
1. Introduction
- Composite Valuation Function: We introduce a composite valuation function that prioritizes target revisitation based on factors such as time since the last visit and distance to the target, ensuring efficient task allocation among UAVs and reducing average revisit time.
- Heuristic Algorithm for Connectivity and Efficiency: To address the challenges posed by dynamic changes in network nodes, we developed a heuristic algorithm to ensure constant connectivity while minimizing the average revisit time, accommodating frequent topological changes commonly encountered in FANET environments.
- Mathematical Model for Task Assignment and Relay Allocation: We provide a comprehensive mathematical model for UAV task assignment with relay allocation, ensuring continuous network connectivity by strategically positioning relay UAVs where needed.
- Extensive Validation through Simulation: To assess the robustness and efficiency of our algorithm, we performed extensive simulations, demonstrating superior performance and adaptability compared to existing methods in the literature.
2. Related Work
2.1. Latency Minimization in Multi-Agent Systems
2.2. Dynamic Task Allocation and Challenges in Routing and Connectivity for Multi-UAV Systems
2.3. Comparison with Existing Methods
3. Revisiting Problem and Target Valuation in FANETs
- Time since last visit: The duration that has elapsed since the target was last visited.
- Distance to the target: The proximity of the target to the UAV’s current position.
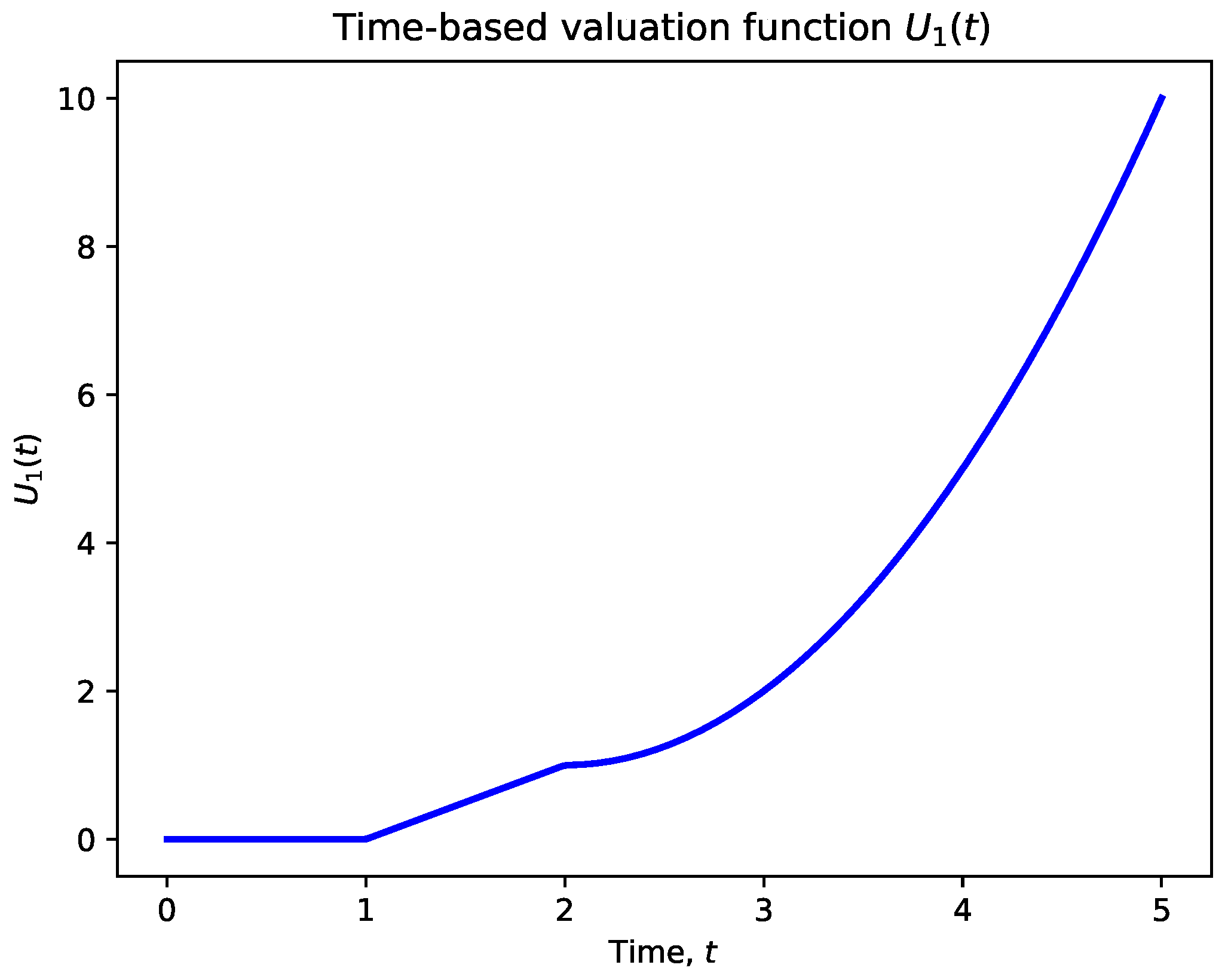
3.1. Time-Based Valuation Function
- t is the time elapsed since the target was last visited.
- and are predefined time thresholds that determine how the valuation increases over time.
- represents the minimum time after which a target starts to gain value. Before this time, the target does not require immediate revisitation.
- marks the time after which the urgency to revisit the target increases more rapidly (quadratically), indicating a critical need for revisitation.
- For , the valuation is zero, implying that the target does not need immediate revisitation shortly after the last visit.
- For , the valuation increases linearly with time, reflecting a growing need to revisit the target as time progresses.
- For , the valuation increases quadratically with time, indicating an urgent need to revisit the target since a significant amount of time has passed.
- min: No need to revisit within the first 10 min.
- min: After 30 min, the urgency to revisit increases significantly.
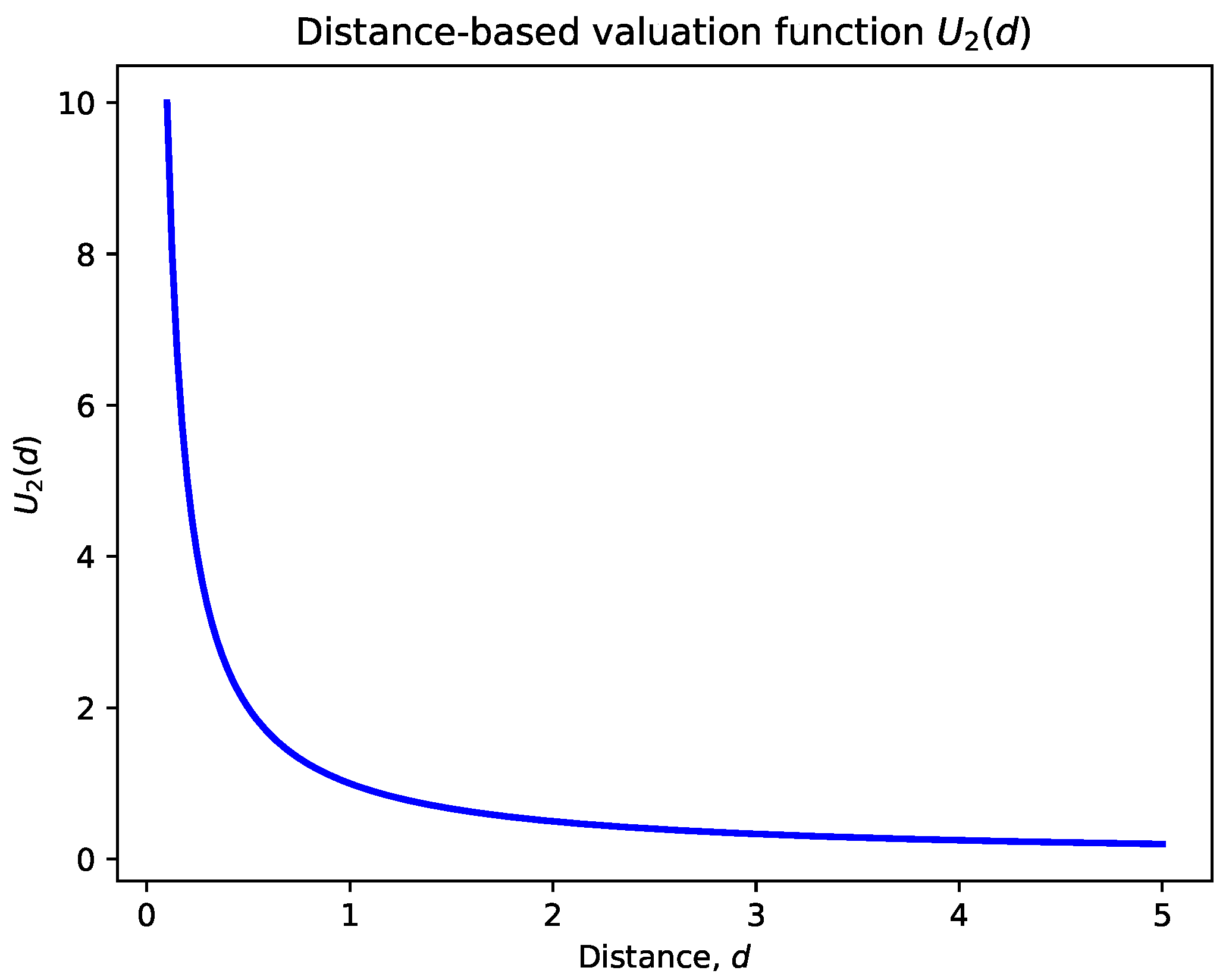
3.2. Distance-Based Valuation Function
- u represents the current position of the UAV.
- g represents the position of the target.
- is the Euclidean distance between the UAV and the target.
- is a small positive constant added to avoid division by zero when the distance is very small.
- , where and are the coordinates of the UAV and the target, respectively.
- ensures numerical stability; a typical value might be .
- The valuation inversely correlates with the distance: the closer the UAV is to the target, the higher the valuation.
- This encourages the UAV to prioritize nearby targets, optimizing travel time and energy consumption.
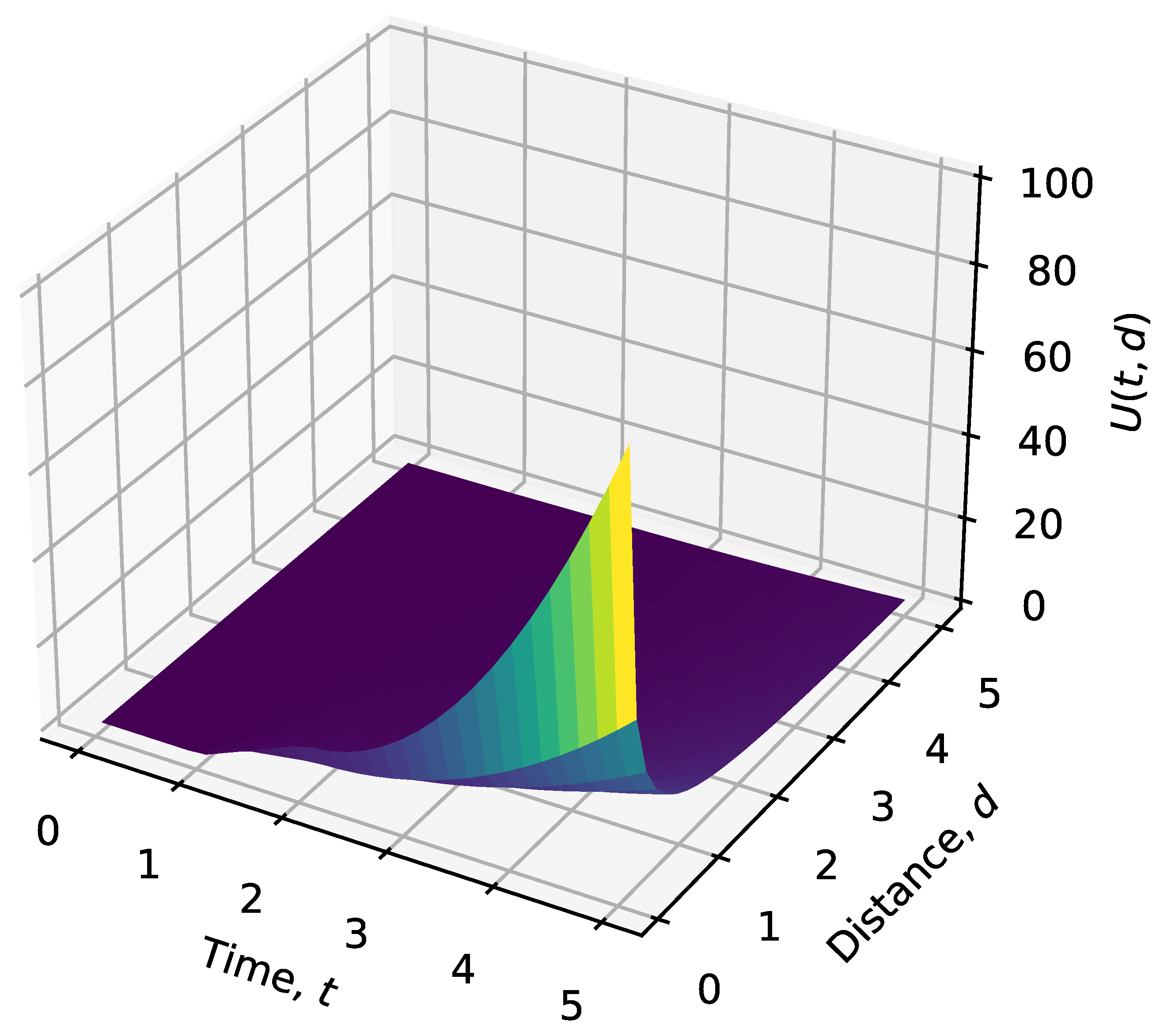
3.3. Composite Valuation Function
- : The composite valuation of target g for UAV u at time t.
- : The time-based valuation function, reflecting the urgency to revisit the target based on the time elapsed since the last visit.
- : The distance-based valuation function, representing the UAV’s proximity to the target.
- When the target g requires revisitation, i.e., .
- When the UAV u is operational and capable of reaching the target g.
- A higher indicates a greater need to revisit the target due to the elapsed time.
- A higher suggests that the UAV is closer to the target.
- The product thus represents the overall priority of assigning UAV u to revisit target g at time t.
- If , then , regardless of . This means that the target does not currently require revisitation.
- If is small (UAV is far from the target), will be low even if is high, indicating lower priority due to distance.
- The highest priority is when both and are high, meaning that the target is overdue for revisitation and the UAV is nearby.
- Continuously update and as time progresses and UAV positions change.
- Recalculate at each decision point to reflect the most current priorities.
3.4. Algorithmic Implementation
| Algorithm 1: Priority-Based Target Revisitation Algorithm |
 |
- TimeBasedValuation(t): Calculates the time-based valuation based on the elapsed time t since the last visit to the target.
- DistanceBasedValuation (): Calculates the distance-based valuation based on the current position of the UAV u and the target g.
- CompositeValuation (): Computes the overall valuation by multiplying the time-based and distance-based valuations.
- ResetVisit (g): Updates the target’s last visit time, effectively resetting the time-based valuation component.
3.5. Graphical Representation
- Time-Based Valuation Function (Figure 1): This function shows how valuation grows over time, starting from zero. The increase is gradual at first (linear) before accelerating quadratically after a certain threshold. This design reflects the importance of revisiting targets based on time delays, giving higher priority to targets as they become overdue for action.
- Distance-Based Valuation Function (Figure 2): The distance valuation is inversely proportional to the distance . Closer targets receive significantly higher valuation, while farther targets contribute less to the overall prioritization. This guides UAVs to prioritize nearby targets efficiently while still accounting for more distant ones with lower weights.
- Composite Valuation Function (Figure 3): This function integrates both time and distance considerations. As seen in the figure, high valuation is assigned to targets that are both overdue for revisitation (high t) and within close proximity (low ). This combined approach effectively balances the urgency of action with operational efficiency.
3.6. Summary
4. Heuristic Algorithm for Multi-UAV Routing and Connectivity
4.1. Problem Formulation
- represents the set of nodes, including all UAVs and the central station.
- represents the set of edges, with denoting the Euclidean distance between nodes and , and as the maximum communication range between any two nodes, including UAVs and the central station.
4.1.1. Assumptions
- All UAVs are homogeneous in terms of speed, communication range, and capabilities.
- Communication between UAVs is bidirectional and reliable within the range .
- The positions of the targets and the central station are known and stationary.
- UAVs can act either as data collectors or as relay nodes to facilitate communication.
- UAVs have sufficient energy resources for the duration of the mission.
4.1.2. Variables and Notations
- U: Set of UAVs.
- G: Set of targets.
- S: Central station.
- : Set of UAVs acting as collectors.
- : Set of UAVs acting as relays ().
- : Euclidean distance between UAV u and UAV v.
- : Euclidean distance between UAV u and target g.
- : Communication range of UAVs.
- : Binary decision variable; if UAV u is assigned to target g at time t, and 0 otherwise.
- : Binary variable; if there is a communication link between UAV u and UAV v at time t, and 0 otherwise.
- : Remaining energy of UAV u.
4.2. Mathematical Model
4.2.1. Objective Function
- : The composite valuation function for UAV u and target g at time t.
- : A binary decision variable, where if UAV u is assigned to target g at time t, and 0 otherwise.
4.2.2. Constraints
- C1:
- Assignment Constraint: Each UAV can be assigned to at most one target at any given time.
- C2:
- Coverage Constraint: Each target may be assigned to multiple UAVs but must be visited by at least one UAV over time to minimize revisit time.
- C3:
- Connectivity Constraint: For every UAV , there must exist a communication path to the central station S.
- C4:
- Communication Range Constraint: Communication links between UAVs are established only if they are within the communication range .
- C5:
- Relay Assignment Constraint: When critical connections are at risk, UAVs not assigned to targets act as relays to maintain network connectivity. The set of relay UAVs at any time t is defined asCritical connections can arise in two cases:
- Between UAVs: In this situation, relay UAVs are allocated based on established methods from the literature (e.g., Bekmezci et al. [32]).
- Between UAV and Central Station: A custom relay assignment algorithm is utilized, as detailed in Section 4.5.
- C6:
- Energy Constraint: UAVs have limited energy resources.where is the energy consumption of UAV u at time t.
- C7:
- Movement Constraint: UAVs move either toward their assigned targets or adjust their positions dynamically to act as relays. Relay UAVs actively reposition themselves based on the states and movements of the UAVs assigned to targets, ensuring continuous connectivity and maintaining the network as a single connected component.
- C8:
- Initial Conditions: At , the initial positions of UAVs and the central station are known, and the network is connected.
4.3. Heuristic Algorithm Description
- Assign UAVs to Targets: Assign UAVs to targets based on the highest composite valuation, ensuring that each UAV is assigned to at most one target, in compliance with Constraint C1.
- Identify Relay UAVs: UAVs not assigned to targets become relay UAVs to maintain network connectivity.
- Relay UAV Allocation: Allocate relay UAVs to maintain network connectivity, as detailed in Section 4.5.
- Update Positions: Move UAVs toward their assigned targets or relay positions, considering their movement constraints and communication range.
- Update Energy Levels: Decrease the energy levels of UAVs based on their movement and communication activities, as per Constraint C6.
- Update Time Since Last Visit: For each target, update the time since it was last visited. If a UAV reaches a target, reset the time for that target.
- Repeat: Proceed to the next time step and repeat the process until the mission duration is reached or all targets have been sufficiently revisited.
4.4. Algorithm Steps
| Algorithm 2: Heuristic Algorithm for Multi-UAV Routing and Connectivity |
 |
4.5. Relay UAV Allocation
4.5.1. Initialization of Variables and Structures
- UAV Role Lists:
- –
- : UAVs assigned to targets (Leader UAVs).
- –
- : UAVs assigned as communication relays.
- Adjacency Matrix ():
- –
- Represents the connections between UAVs and the central station.
- –
- Calculated based on UAV positions and the communication threshold .
- At-Risk Links ():
- –
- Represents edges with distances satisfying .
- –
- Identifies connections that are likely to disconnect shortly.
- –
- Critical for proactive network management to prevent the formation of multiple connected components.
- –
- Additionally, it evaluates whether UAVs or the central station reside in different connected components, which is necessary to classify a link as truly “at risk”.
4.5.2. Detecting and Addressing Risky Connections
- Depth First Search (DFS) and Breadth First Search (BFS): Both algorithms traverse the graph from any given node to identify all reachable nodes, effectively mapping a single connected component. The graph contains multiple connected components if some nodes remain unvisited after a traversal. These algorithms operate with a time complexity of , making them suitable for small- to medium-scale networks.
- Union-Find Algorithm: This algorithm is efficient for large-scale networks and dynamic graph updates. It represents each vertex as a set and tracks connectivity by merging sets (union) or querying connected status (find). The Union-Find approach has a time complexity of for basic operations, making it ideal for applications like Kruskal’s Minimum Spanning Tree algorithm. It is particularly effective in maintaining connectivity information during incremental graph updates.
- and (or the central station S) must belong to different connected components.
- The network graph must contain more than one connected component when evaluated based on the threshold.
4.5.3. Algorithm Flow
- Network Connectivity Evaluation:
- Processing of Fully Connected Network:
- If the network is connected, perform the following:
- –
- Reset all UAVs to Free status.
- –
- Reset all targets to unassigned status.
- –
- Enter the task assignment loop:
- *
- Assign unassigned targets to free UAVs based on the highest composite valuation . These UAVs become Leader UAVs ().
- *
- Leader UAVs move toward their assigned targets while maintaining communication links with neighbouring UAVs during their movement.
- Processing of Disconnected Network:
- If the network consists of multiple connected components, perform the following:
- –
- Analyze At-Risk Connections:
- *
- Identify at-risk links using Equation (11).
- *
- Determine whether the at-risk connection is between two UAVs or between a UAV and the central station S.
- –
- Assess Need for Relay UAVs:
- *
- For each UAV assigned to a target and at risk of losing connection with S, calculate the number of relay UAVs required to maintain connectivity.
- *
- The required number of relay UAVs is determined bywhere is the distance between UAV u and the central station S.
- –
- Allocate Relay UAVs Based on Proximity:
- *
- Identify the closest available free UAVs to act as relay UAVs.
- *
- Assign these UAVs as Relay UAVs () and position them at intervals of approximately along the straight line between u and S.
- *
- The positions for relay UAVs are calculated aswhere S and u are the central station’s and the UAV’s position vectors, respectively.
- –
- Reassign Remaining UAVs to Targets:
- *
- Recalculate the composite valuation for all unassigned UAVs and targets.
- *
- Assign remaining free UAVs to targets based on the highest composite valuation, ensuring compliance with energy and connectivity constraints.
- –
- Adjust UAV Movements:
- *
- Leader UAVs move toward their assigned targets.
- *
- Relay UAVs move to their assigned positions along the path between S and u.
- *
- Ensure that communication links between all UAVs and S are maintained through the relay UAVs.
- –
- Repeat for All At-Risk Connections:
- *
- Apply the above steps for each at-risk connection identified.
- *
- If insufficient free UAVs are available, prioritize relay assignments based on the criticality of the connections.
4.6. Movement and Energy Consumption
- : energy consumption rate per unit speed.
- : speed of UAV u at time t.
- : energy consumption rate for communication.
4.7. Algorithm Complexity
- Calculating Composite Valuation :
- For each UAV and each target , compute using Equation (3).
- Computational complexity: .
- Assigning UAVs to Targets:
- For each UAV u, select the target g with the highest valuation .
- This involves selecting the maximum valuation for each UAV.
- Computational complexity: .
- Identifying Relay UAVs and Allocating Positions:
- Identify the set of UAVs to act as relay nodes.
- Evaluate distances between UAVs, targets, and the central station to identify critical at-risk edges.
- Compute the required number of relay UAVs and their positions.
- Select the closest available UAVs to act as relays.
- Computational complexity: (since ).
- Updating Positions of UAVs and Relay UAVs:
- For each UAV, update its position based on its assigned target or relay position while considering movement constraints.
- Computational complexity: .
- Updating Energy Levels:
- For each UAV, calculate energy consumption and update its energy level.
- Computational complexity: .
- Updating Time Since Last Visit:
- For each target , update .
- If a UAV reaches a target, reset .
- Computational complexity: .
- Verifying Network Connectivity:
- Use graph traversal algorithms (e.g., BFS or DFS) to verify that the network remains connected.
- Computational complexity: .
5. Experimental Study with Comparative Analysis
5.1. Evaluation Metrics
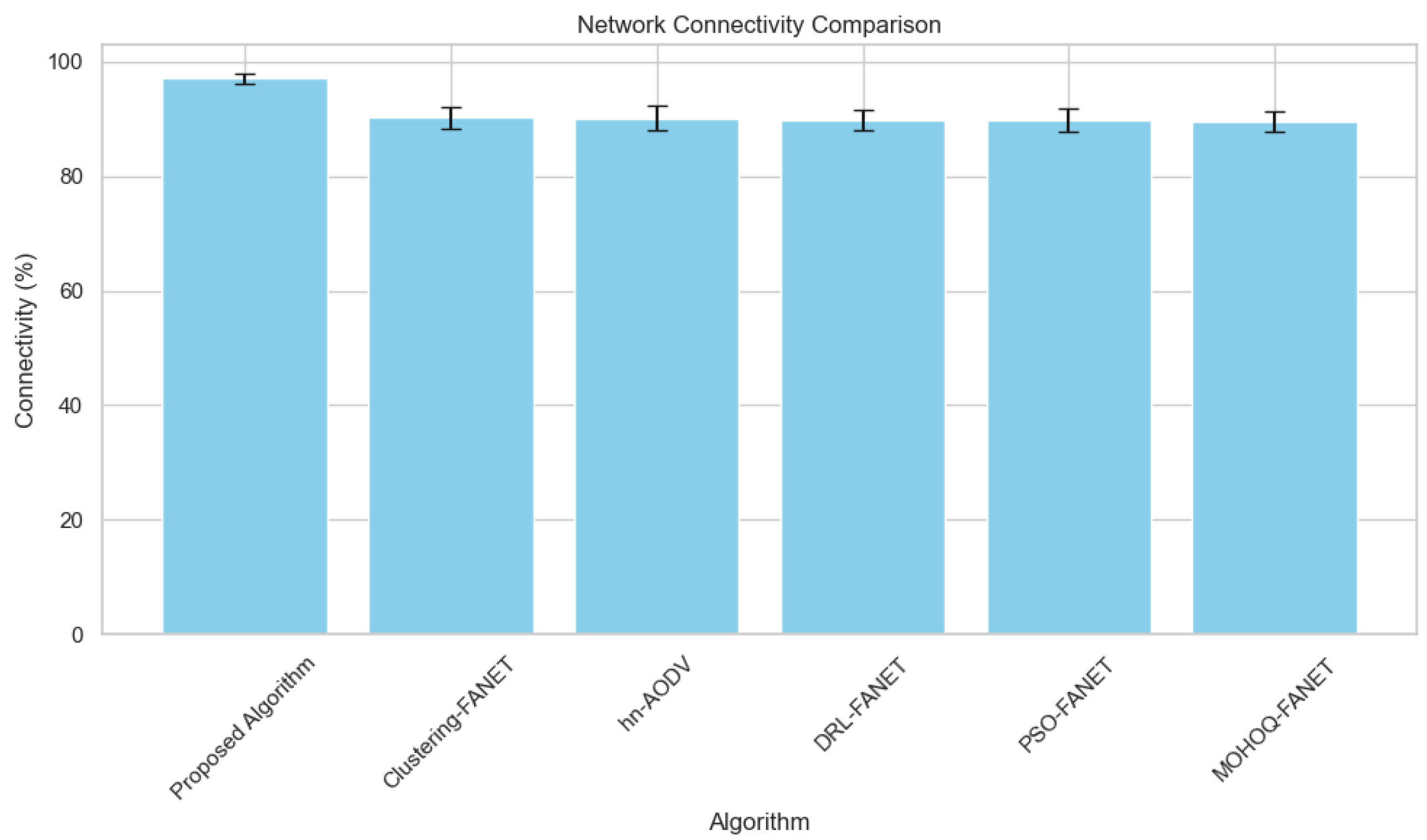
- Network Connectivity: Measures the percentage of time during which the network remains connected throughout the simulation.
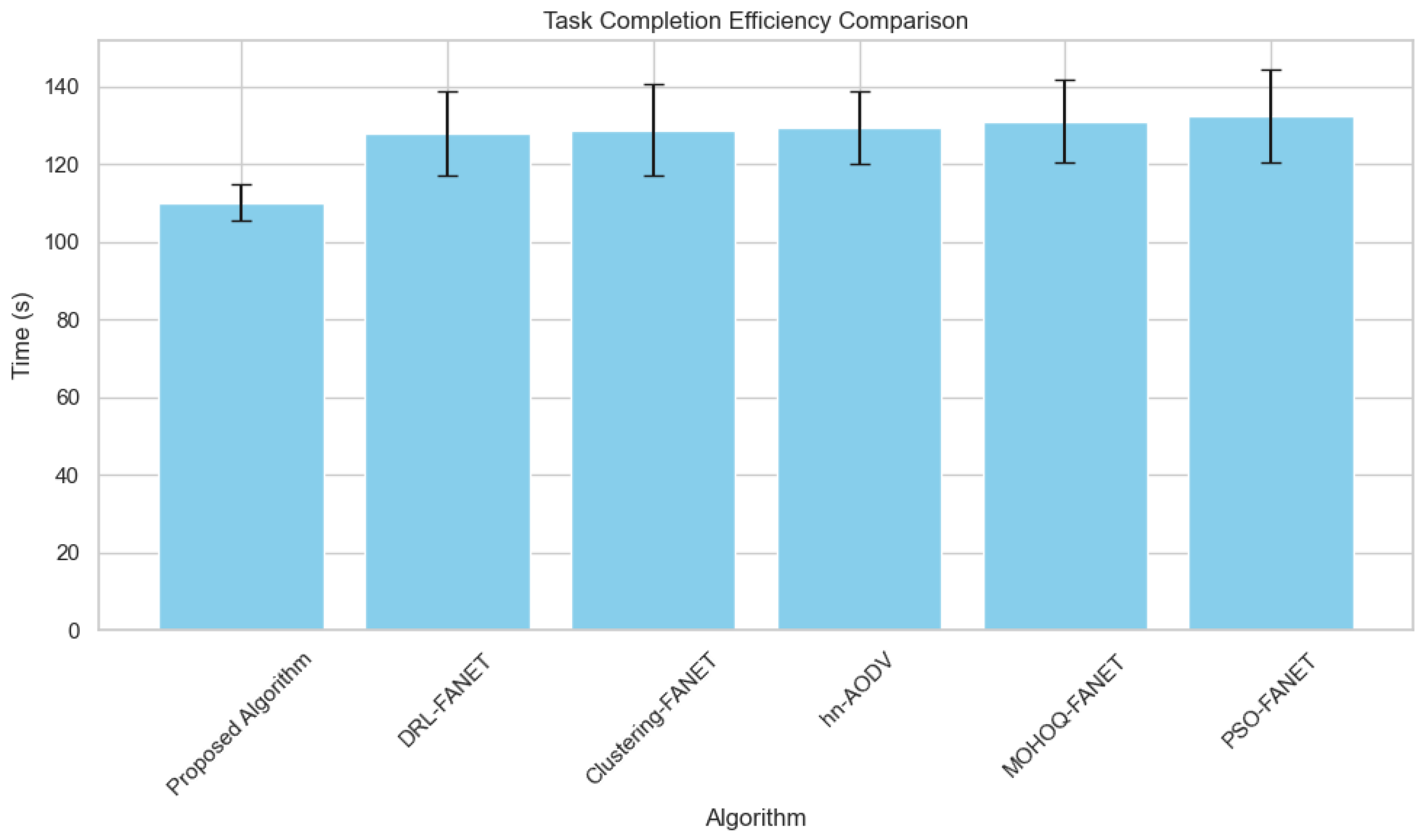
- Task Completion Efficiency: Evaluates the average time required to complete a mission or visit all targets.
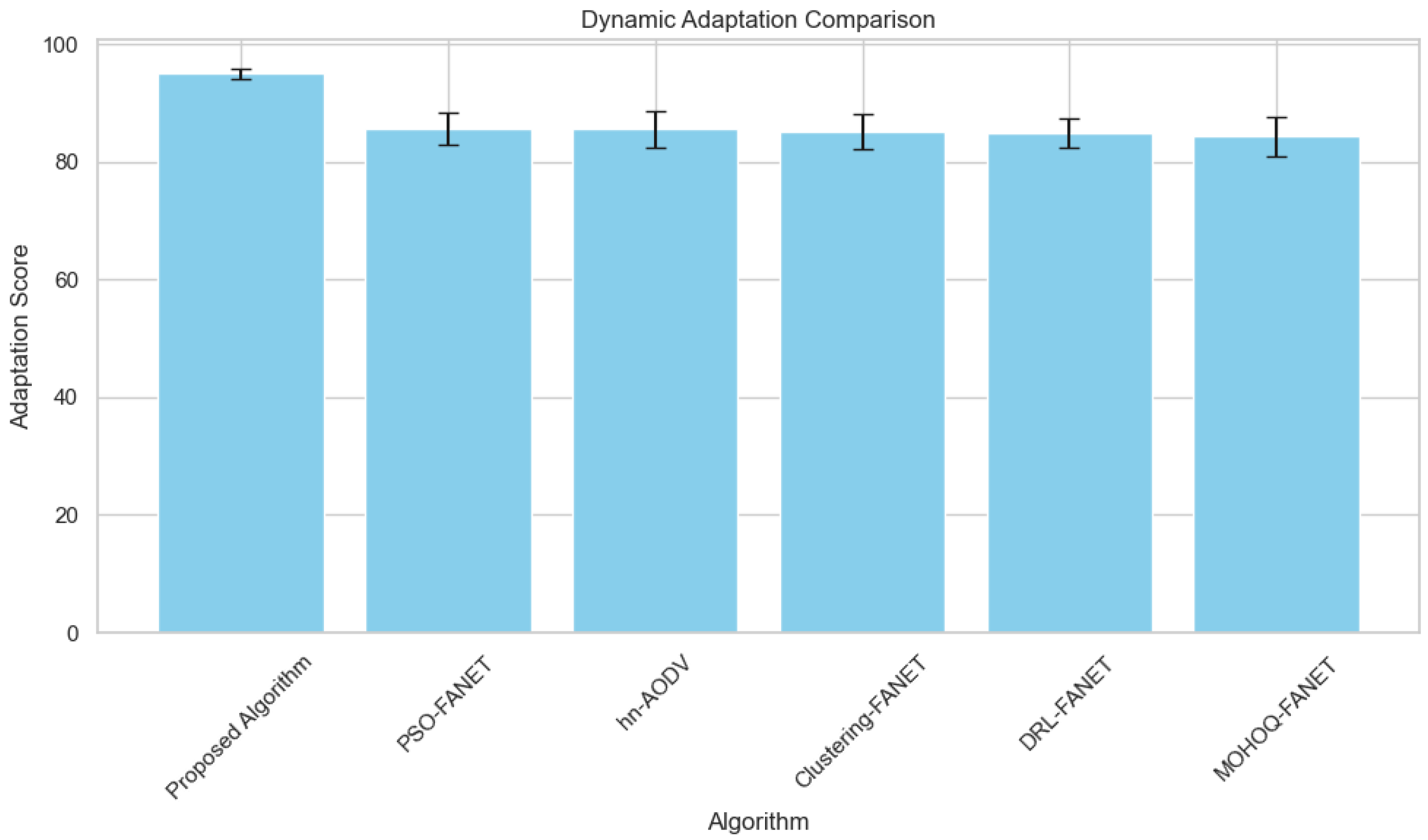
- Dynamic Adaptation: Assesses the algorithm’s ability to sustain performance under environmental factors such as target densities, terrain size, and connectivity constraints.
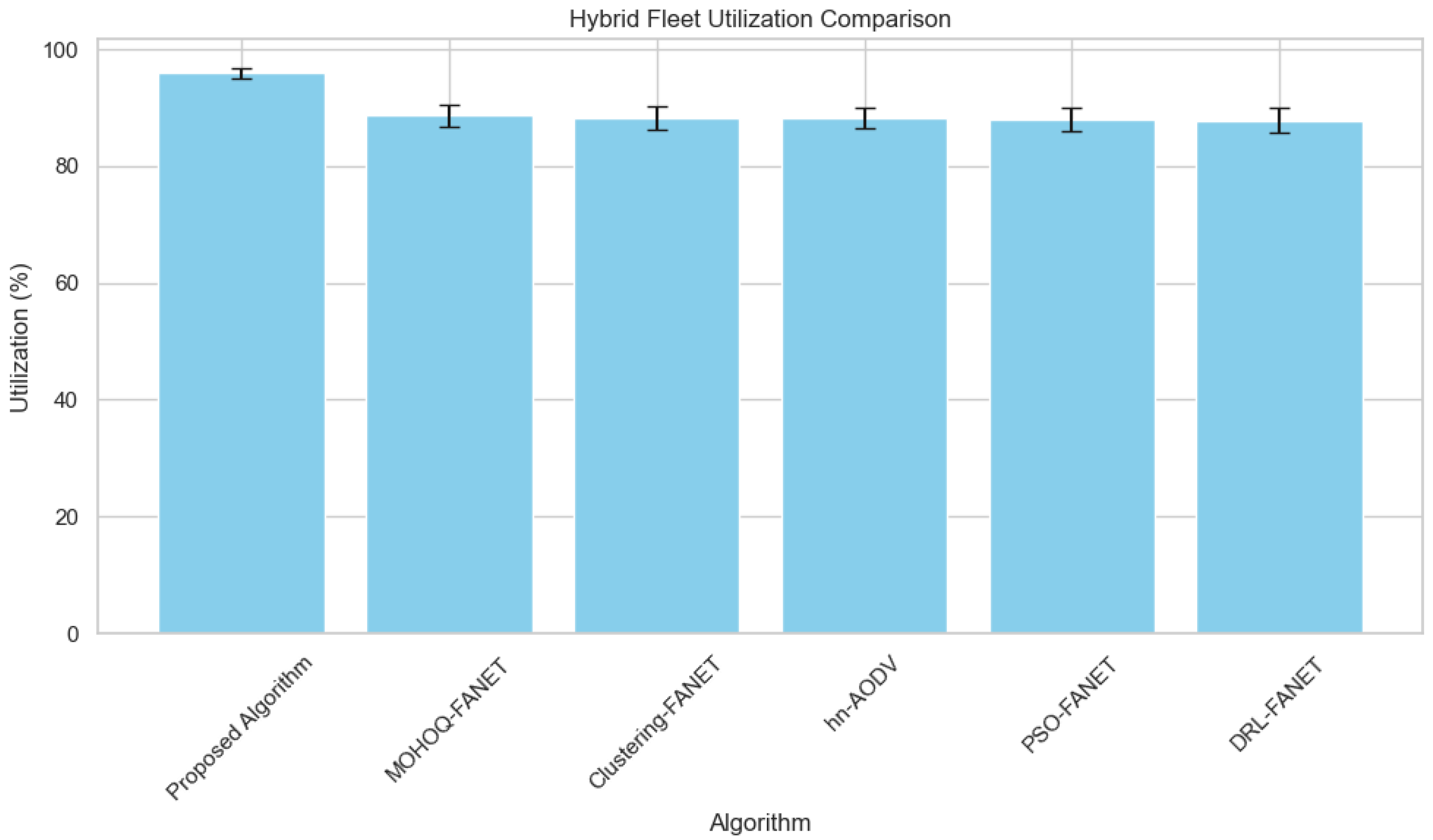
- Hybrid Fleet Utilization: Quantifies the efficient use of hybrid UAV fleets with varying capabilities (speed, range, and payload).
5.2. Hybrid UAV Fleet Scenarios
- Fleet Composition: The fleet includes UAVs with varying maximum speeds (2–20 m/s), connectivity ranges (100–1500 m), and payload capacities (5–20 kg).
- Dynamic Role Assignment: The algorithm assigns tasks based on UAV capabilities, such as faster UAVs to long-distance targets and higher-payload UAVs to critical or more significant tasks.
- Energy Efficiency: Performance is measured by evaluating energy consumption across hybrid fleets.
5.3. Experimental Parameters
5.4. Comparative Analysis with Hybrid UAV Fleets
- A Multi-Objective Optimization for Enhancing Service Efficiency in FANETs (MOHOQ-FANET): This method utilizes Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO) to improve task allocation among UAVs in FANETs. The proposed MOHOQ-FANET approach addresses dynamic routing and enhances efficiency while maintaining stable communication [36].
- Comparison of Deep Reinforcement Learning Approaches for FANET Optimization: This research leverages deep reinforcement learning (DRL) to optimize task allocation and resource management in FANETs. It compares centralized and distributed approaches to dynamically balance the load and adaptively offload tasks for improved multi-UAV task execution [37].
- A Hop-Count and Neighbor-Count Based Routing Protocol (hn-AODV): The hn-AODV protocol integrates hop and neighbor counts into routing decisions, optimizing dynamic routing in FANETs. It significantly reduces end-to-end delay and enhances performance in multi-UAV systems by improving route selection and connectivity [38].
- Joint Task Scheduling, Resource Allocation, and UAV Trajectory under Clustering for FANETs: This method introduces a clustering framework for FANETs that combines task scheduling, resource allocation, and UAV trajectory optimization. The approach minimizes energy consumption while ensuring efficient task execution and network stability [39].
- Research on Clustering Routing Protocol Based on Improved PSO in FANET: By applying enhanced Particle Swarm Optimization (PSO), this method improves routing efficiency and UAV localization in dynamic FANET environments. It addresses challenges like high mobility and efficient data transmission in multi-UAV systems [40].
6. Discussion
6.1. Superior Network Connectivity Performance
6.2. Greater Efficiency in Completion of Tasks
6.3. Superior Energy Efficiency
6.4. Robust Dynamic Adaptation
6.5. Hybrid Fleets of UAVs Leveraged Effectively
6.6. Implications for Real-World Applications
- Disaster Response: Connectivity and task allocation in dynamic environments when the stakes are high.
- Crop Monitoring: Regularly revisit key areas to collect data on large-scale farms.
- Surveillance and Reconnaissance: The following can be achieved in operations related to defense and security: continuous observation with minimum downtime.
- Environmental Studies: Long-term missions using energy-efficient routing for data collection in a region.
6.7. Future Directions
- Integration of Machine Learning: In the future, reinforcement learning can be conducted to predict target priorities based on real-time optimized UAV assignments. This will make the algorithm learn to adapt to new environments after each mission.
- Failures of UAVs: The algorithm should be extended to handle dynamic UAV failures by reallocating tasks and recalibrating connectivity strategies that would enhance the algorithm’s robustness.
- Advanced Models of Communication: For instance, these include interference, limited bandwidth, and latency within the connectivity framework.
- Cooperative Strategies: The establishment of collaboration strategies by UAVs in sharing resources will contribute toward achieving higher performance of the overall system during missions.
- Experimental Verification: Real-world UAV fleet field experiments would confirm practical feasibility and further help in deducing areas for refinement.
7. Conclusions
- Proactive Connectivity Maintenance: Using graph-theoretic techniques, the algorithm identifies connections that could be on the verge of breaking and proactively reserves relay UAVs to ensure that the network remains a single connected component, even in highly dynamic environments. This is particularly important in FANETs, where topological changes are frequent and disruptive.
- Efficient Task Scheduling: The composite valuation function combines temporal urgency and spatial proximity for the dynamic prioritization of targets. This approach minimizes UAVs’ revisiting critical targets while balancing the trade-off between task efficiency and connectivity.
- Energy-Aware Routing: The algorithm enforces energy-efficient routing by dynamically assigning tasks to UAVs with sufficient energy reserves while reallocating low-energy UAVs to act as relays. This extends the operational lifetime of the fleet while maintaining high connectivity and task completion rates.
- Dynamic Adaptation: The ability to adapt to diverse scenarios—such as varying target densities, fleet sizes, and terrain configurations—demonstrates the algorithm’s robustness. The continuous recalibration of UAV roles and connectivity strategies sustains performance in complex and changing environments.
- Optimal Utilization of Hybrid UAV Fleets: The algorithm considers hybrid UAV fleets with heterogeneous speed, payload capacity, and communication range capabilities. Tasks are assigned based on these capabilities, enabling better resource utilization and higher mission efficiency.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| FANET | Flying ad hoc Network |
| AI | Artificial Intelligence |
| DFS | Depth First Search |
| BFS | Breadth First Search |
| PSO | Particle Swarm Optimization |
| RL | Reinforcement Learning |
| GPSR | Greedy Perimeter Stateless Routing |
| QEHLR | Q-Learning-Enhanced Heuristic Lightweight Routing |
| WOA-DSR | Whale Optimization Algorithm for Dynamic Source Routing |
| UF-GPSR | Unified Framework for Greedy Perimeter Stateless Routing |
| MA-DAC | Multi-Agent Dynamic Algorithm Configuration |
| Rc | Communication Range |
| Tmax | Total Mission Duration |
| ML | Machine Learning |
| CPU | Central Processing Unit |
| C# | C-Sharp Programming Language |
References
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Adade, R.; Aibinu, A.; Ekumah, B.; Asaana, J. Unmanned Aerial Vehicle (UAV) applications in coastal zone management—A review. Environ. Monit. Assess. 2021, 193, 154. [Google Scholar] [CrossRef] [PubMed]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- George, J.; Sujit, P.B.; Sousa, J.B. Search Strategies for Multiple UAV Search and Destroy Missions. J. Intell. Robot. Syst. 2011, 61, 355–367. [Google Scholar] [CrossRef]
- Samaras, S.; Diamantidou, E.; Ataloglou, D.; Sakellariou, N.; Vafeiadis, A.; Magoulianitis, V.; Lalas, A.; Dimou, A.; Zarpalas, D.; Votis, K.; et al. Deep Learning on Multi Sensor Data for Counter UAV Applications—A Systematic Review. Sensors 2019, 19, 4837. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Kim, T.; Lee, S.; Kim, K.H.; Jo, Y.I. FANET Routing Protocol Analysis for Multi-UAV-Based Reconnaissance Mobility Models. Drones 2023, 7, 161. [Google Scholar] [CrossRef]
- Yalçin, S. Heuristic Intelligence Approach to Routing Planning of UAVs Networks. In International Research in Engineering Sciences; Zenodo; Platanus Publishing: Ankara, Turkey, 2023; pp. 37–50. [Google Scholar] [CrossRef]
- Guo, Z.; Chen, H.; Li, S. Deep Reinforcement Learning-Based UAV Path Planning for Energy-Efficient Multitier Cooperative Computing in Wireless Sensor Networks. J. Sens. 2023, 2023, 2804943. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Networking Issues for Small Unmanned Aircraft Systems. J. Intell. Robot. Syst. 2009, 54, 21–37. [Google Scholar] [CrossRef]
- Datta, D.; Dhull, K.; Verma, S. UAV Environment in FANET: An Overview. In FANET Applications and Routing Techniques; CRC Press: Boca Raton, FL, USA, 2020; pp. 153–168. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Du, J.; Hou, X.; Ren, Y.; Han, Z. Stochastic Optimization-Aided Energy-Efficient Information Collection in Internet of Underwater Things Networks. IEEE Internet Things J. 2022, 9, 1775–1789. [Google Scholar] [CrossRef]
- Cicek, C.T. A Reinforcement Learning Algorithm for Data Collection in UAV-aided IoT Networks with Uncertain Time Windows. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Pi, W.; Zhou, J. Multi-UAV Enabled Data Collection with Efficient Joint Adaptive Interference Management and Trajectory Design. Electronics 2021, 10, 547. [Google Scholar] [CrossRef]
- Hari, S.K.K.; Rathinam, S.; Darbha, S.; Kalyanam, K.; Manyam, S.G.; Casbeer, D. Efficient Computation of Optimal UAV Routes for Persistent Monitoring of Targets. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 605–614. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Jin, Y.; Wei, D.; Gluhak, A.; Moessner, K. Latency and Energy-Consumption Optimized Task Allocation in Wireless Sensor Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Sydney, NSW, Australia, 18–21 April 2010. [Google Scholar] [CrossRef]
- Dai, L.; Chang, Y.; Shen, Z. An Optimal Task Scheduling Algorithm in Wireless Sensor Networks. Int. J. Comput. Commun. Control 2011, 6, 101–112. [Google Scholar] [CrossRef]
- Zhang, Z.; Stanica, R.; Valois, F. Delay-based Core Network Placement in Self-Deployable Mobile Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021. [Google Scholar] [CrossRef]
- Gao, A.; Zhang, Q.; Wang, Q.; Zhang, J. Completion Time Optimization with RSS for Multi-UAV Assisted Secure Communications. IEEE Wirel. Commun. Lett. 2023, 12, 3309053. [Google Scholar] [CrossRef]
- Qiu, Z.J.; Tian, S.; Zhou, B.; Han, Q.; Tian, Y.; Weng, T.; Mamut, T. Consensus of Fixed and Adaptive Coupled Multi-Agent Systems with Communication Delays. Electronics 2023, 12, 1279. [Google Scholar] [CrossRef]
- Xue, K.; Xu, J.; Yuan, L.; Li, M.; Qian, C.; Zhang, Z.; Yu, Y. Multi-agent Dynamic Algorithm Configuration. arXiv 2022, arXiv:2210.06835. [Google Scholar]
- Zou, C.; Yu, L.; Yang, S.X.; Ou, L. Minimal-Time Complex Consensus for Multi-Agent Systems with Time Delay. IET Control Theory Appl. 2022, 16, 12255. [Google Scholar] [CrossRef]
- Moon, S.; Youn, W.; Bang, H. Novel Deep-Learning-Aided Multimodal Target Tracking. IEEE Sens. J. 2021, 21, 3100588. [Google Scholar] [CrossRef]
- Hajian, H.; Nabi, M.; Fakouri, M.; Veisi, F. LaDiS: A Low-Latency Distributed Scheduler for Time-Slotted Channel Hopping Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019. [Google Scholar] [CrossRef]
- Kalinagac, O.; Gürkan, G.; Alagöz, F. Prioritization Based Task Offloading in UAV-Assisted Edge Networks. Sensors 2023, 23, 2375. [Google Scholar] [CrossRef]
- You, W.; Dong, C.; Wu, Q.h.; Qu, Y.; Wu, Y.; He, R. Joint task scheduling, resource allocation, and UAV trajectory under clustering for FANETs. China Commun. 2022, 19, 104–118. [Google Scholar] [CrossRef]
- Cao, L.; Tan, H.S.; Peng, H.; Pan, M.C. Multiple UAVs hierarchical dynamic task allocation based on PSO-FSA and decentralized auction. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 2368–2373. [Google Scholar] [CrossRef]
- Fei, B.; Liu, D.; Zhou, J.; Bao, W.; Chen, F.; Zhang, H. A Spectral Clustering Enabled Dynamic Task Allocation Approach of Multiple UAVs. In Proceedings of the 2022 8th International Conference on Big Data and Information Analytics (BigDIA), Guiyang, China, 24–25 August 2022; pp. 408–415. [Google Scholar] [CrossRef]
- Aljalaud, F.; Kurdi, H.; Youcef-Toumi, K. Bio-Inspired Multi-UAV Path Planning Heuristics: A Review. Mathematics 2023, 11, 2356. [Google Scholar] [CrossRef]
- Bekmezci, I.; Ermis, M.; Kaplan, S. Connected Multi UAV Task Planning for Flying Ad Hoc Networks. In Proceedings of the 2014 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom 2014), Odessa, Ukraine, 27–30 May 2014; pp. 28–32. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Tarjan, R.E. Depth-first search and linear graph algorithms. SIAM J. Comput. 1972, 1, 146–160. [Google Scholar] [CrossRef]
- Hopcroft, J.E.; Tarjan, R.E. Algorithm for testing the graph planarity. J. ACM (JACM) 1973, 21, 549–568. [Google Scholar] [CrossRef]
- Kim, S.; Kim, I.; You, D. Multi-condition multi-objective optimization using deep reinforcement learning. J. Comput. Phys. 2022, 462, 111263. [Google Scholar] [CrossRef]
- Zhou, S.; Cheng, Y.; Lei, X.; Peng, Q.; Wang, J.; Li, S. Resource Allocation in UAV-Assisted Networks: A Clustering-Aided Reinforcement Learning Approach. IEEE Trans. Veh. Technol. 2022, 71, 12088–12103. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, Y.; Sun, Y.; Qian, J. Multi-UAV Formation Transformation Based on Improved Heuristically-Accelerated Reinforcement Learning. In Proceedings of the 2019 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), 17–19 October 2019; pp. 341–347. [Google Scholar] [CrossRef]
- Hu, P.; Pan, Q.; Guo, Y.; Zhao, C. Study on learning algorithm of transfer reinforcement for multi-agent formation control. Xibei Gongye Daxue Xuebao/J. Northwestern Polytech. Univ. 2023, 41, 389–399. [Google Scholar] [CrossRef]
- Dutta, D.; Dutta, P.; Sil, J. Simultaneous feature selection and clustering with mixed features by multi-objective genetic algorithm. Int. J. Hybrid Intell. Syst. 2014, 11, 41–54. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Default Value |
|---|---|
| Risk Connectivity Threshold () | |
| Terrain Dimensions | |
| UAV Speed Range | |
| Connectivity Range | |
| Payload Capacity | |
| Number of UAVs | |
| Number of Targets | |
| Simulation Steps | 400 scenarios with 25 replicates each for statistical robustness |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erkalkan, E.; Topuz, V.; Buldu, A. Addressing the Return Visit Challenge in Autonomous Flying Ad Hoc Networks Linked to a Central Station. Sensors 2024, 24, 7859. https://doi.org/10.3390/s24237859
Erkalkan E, Topuz V, Buldu A. Addressing the Return Visit Challenge in Autonomous Flying Ad Hoc Networks Linked to a Central Station. Sensors. 2024; 24(23):7859. https://doi.org/10.3390/s24237859
Chicago/Turabian StyleErkalkan, Ercan, Vedat Topuz, and Ali Buldu. 2024. "Addressing the Return Visit Challenge in Autonomous Flying Ad Hoc Networks Linked to a Central Station" Sensors 24, no. 23: 7859. https://doi.org/10.3390/s24237859
APA StyleErkalkan, E., Topuz, V., & Buldu, A. (2024). Addressing the Return Visit Challenge in Autonomous Flying Ad Hoc Networks Linked to a Central Station. Sensors, 24(23), 7859. https://doi.org/10.3390/s24237859