
Autonomous Landing Strategy for Micro-UAV with Mirrored Field-of-View Expansion


Abstract
1. Introduction
- We introduce a mirrored field-of-view expansion system that solves the problem of landing difficulties caused by limited forward-facing camera views during autonomous landing.
- We design a coarse-to-fine pose estimation algorithm based on virtual-real image transformation, enhancing the recognition performance of landing markers.
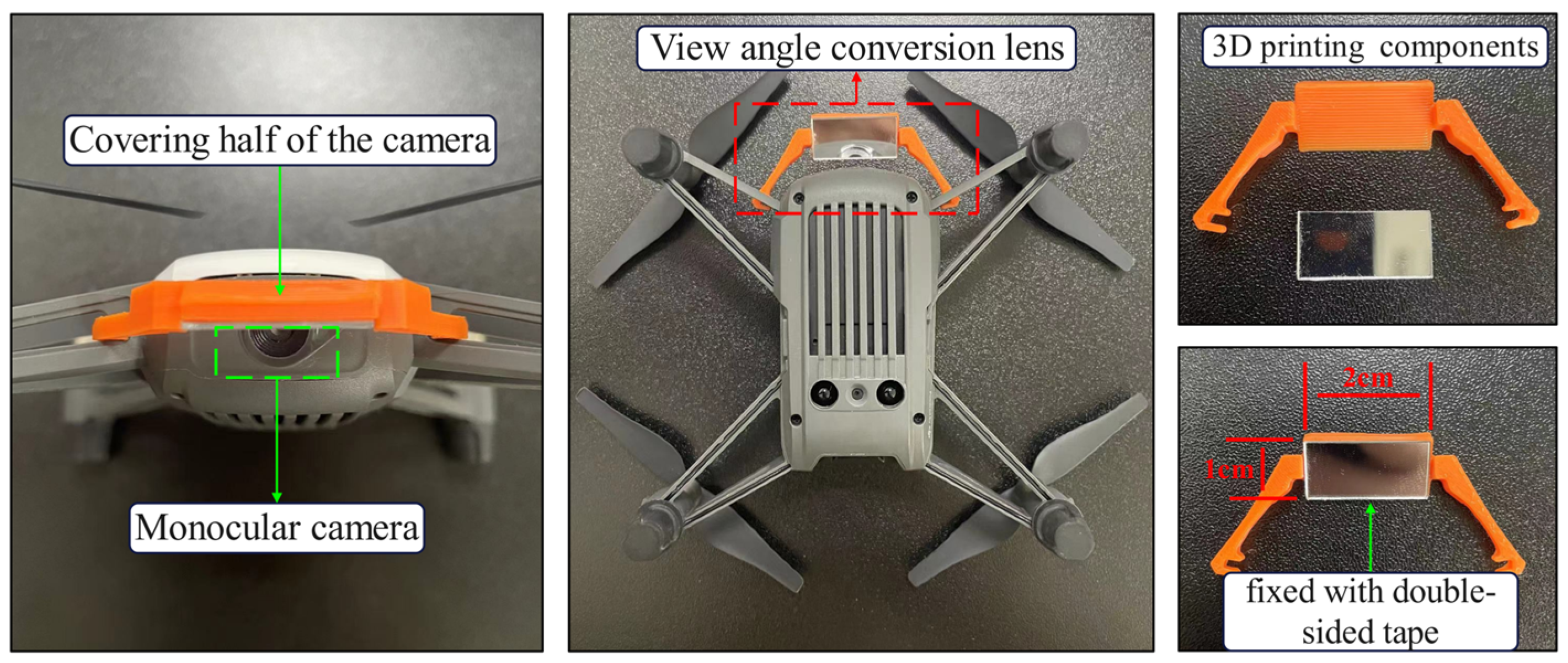
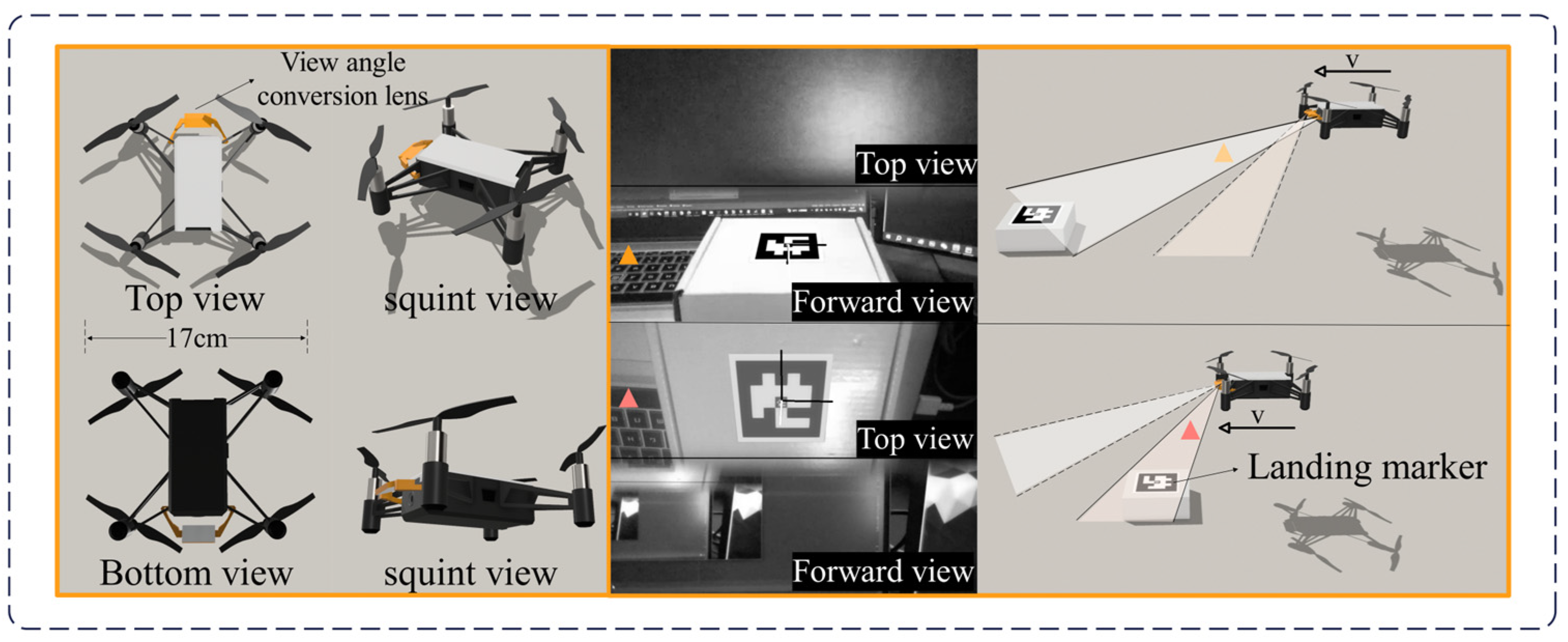
2. Mirrored Field-of-View Expansion System
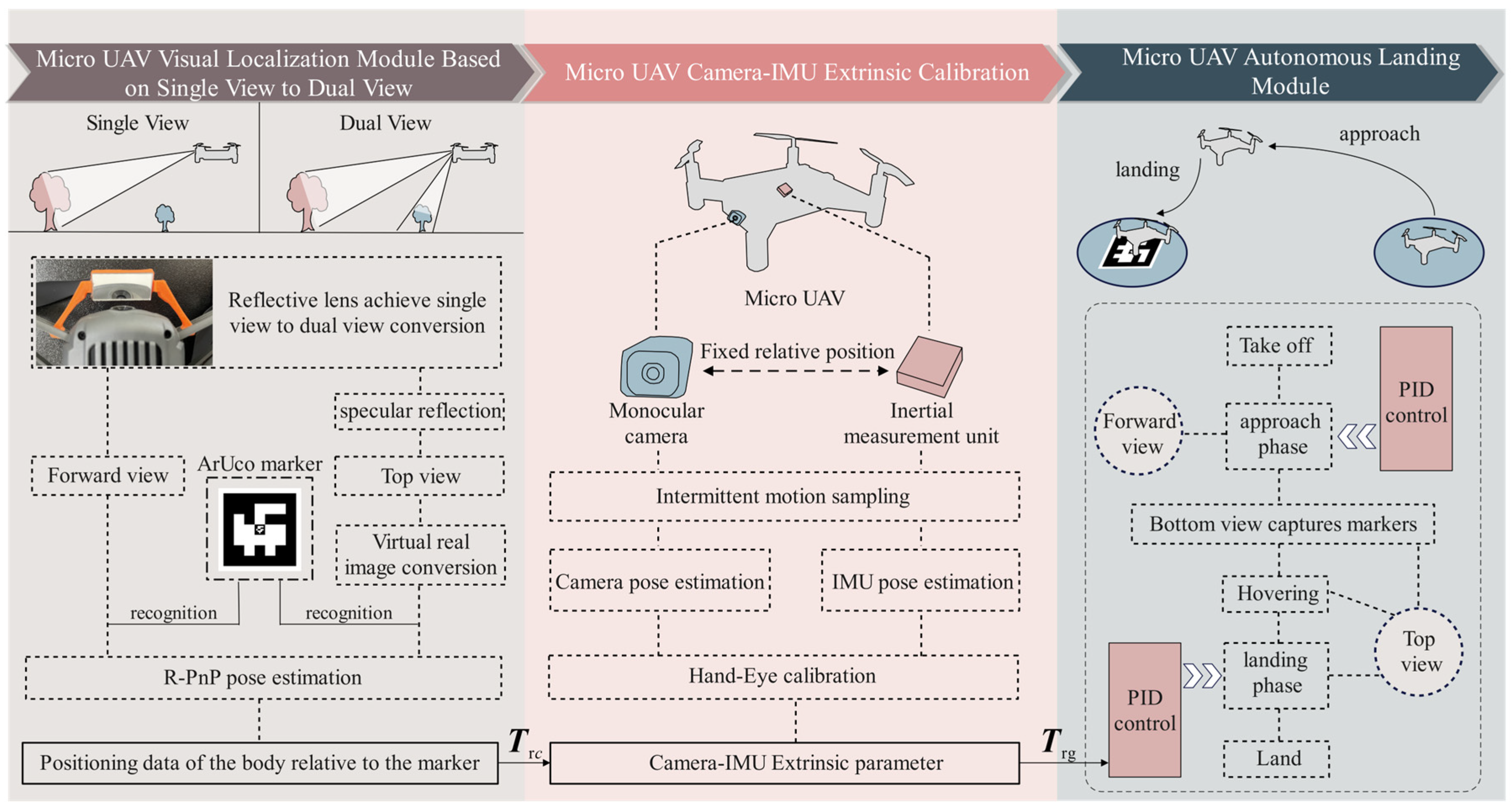
3. Vision-Based Autonomous Landing Method for MAV
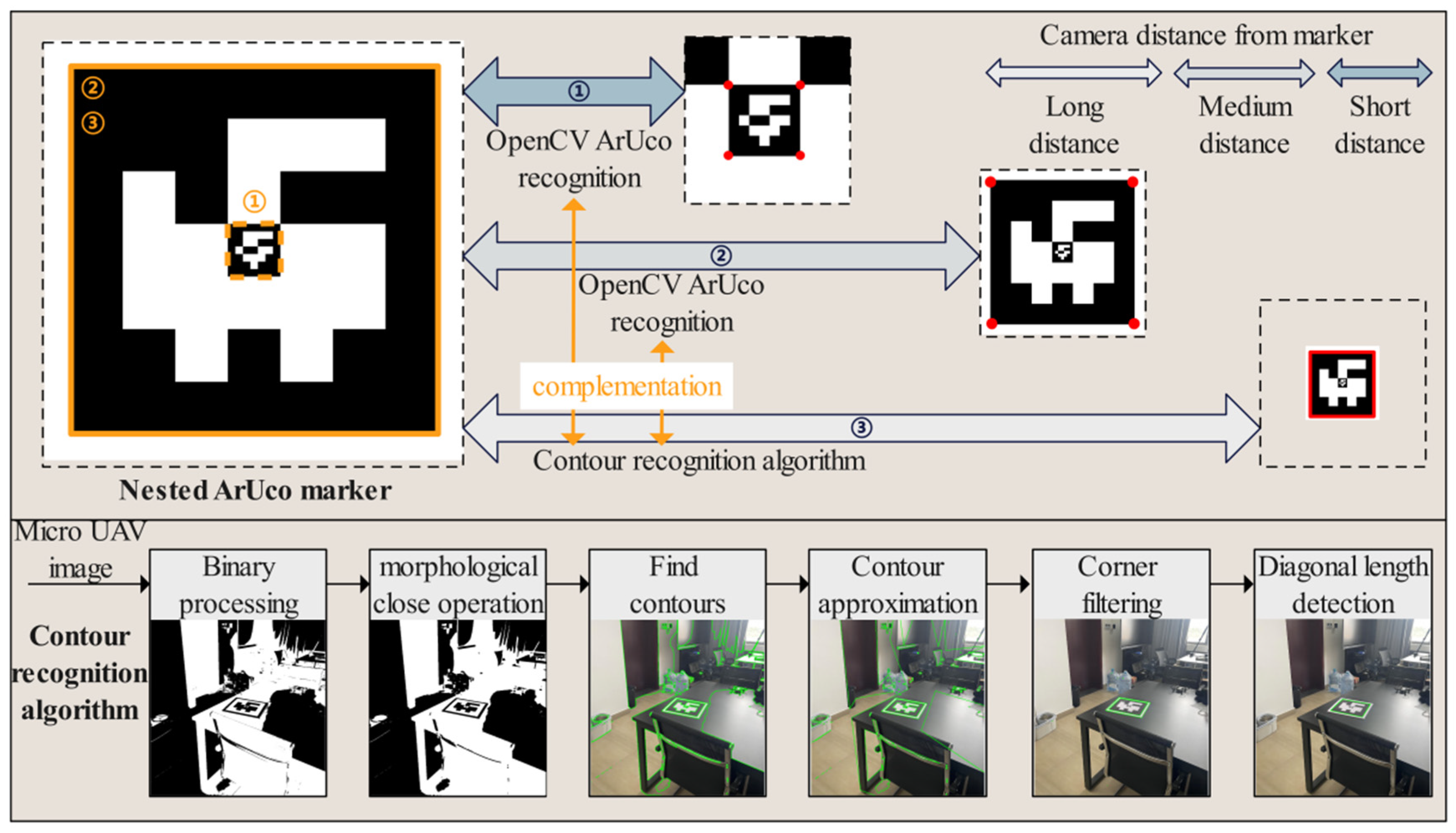
3.1. Coarse-to-Fine MAV Pose Estimation Algorithm
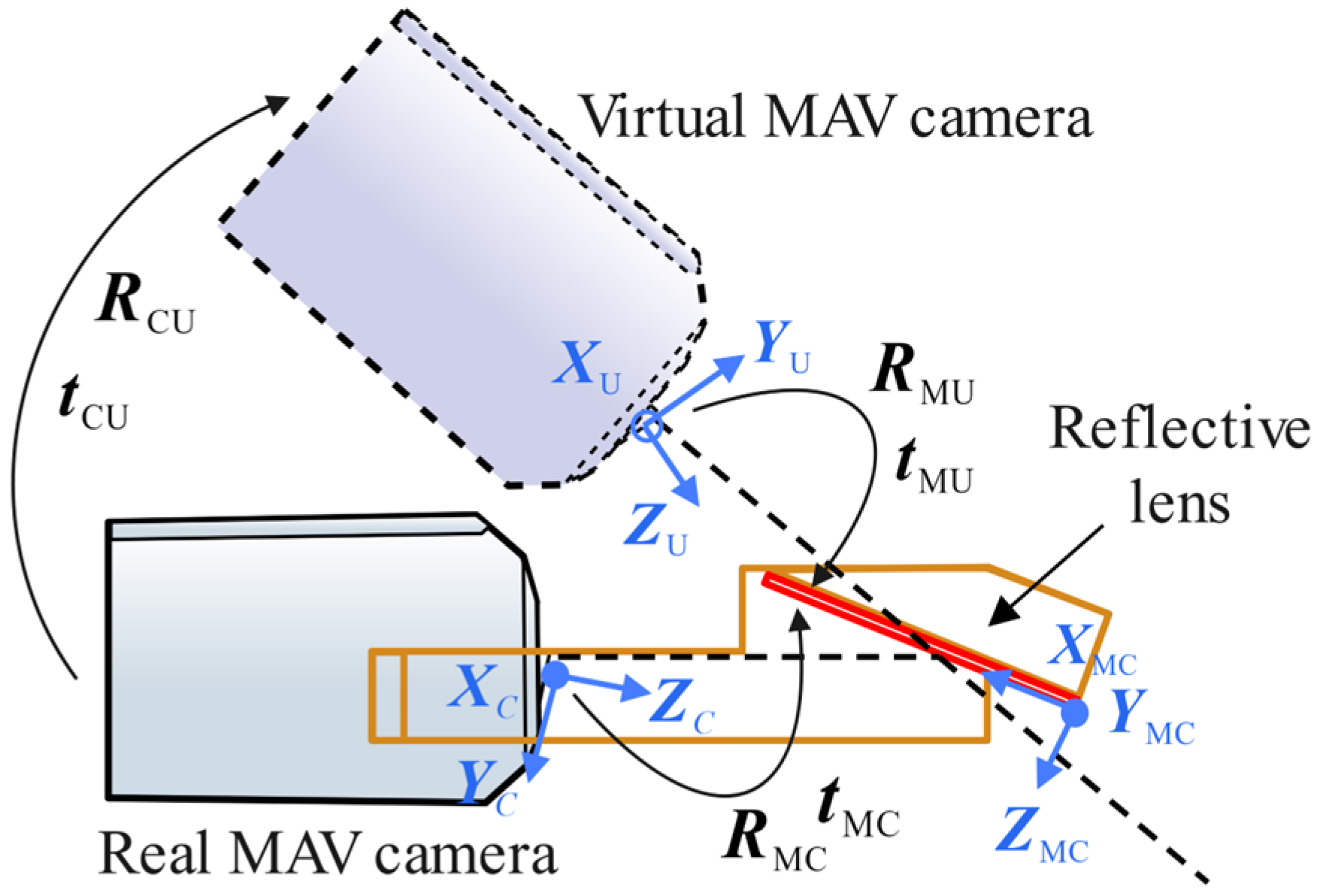
3.2. Virtual-Real Image Conversion Model for Mirror Reflection
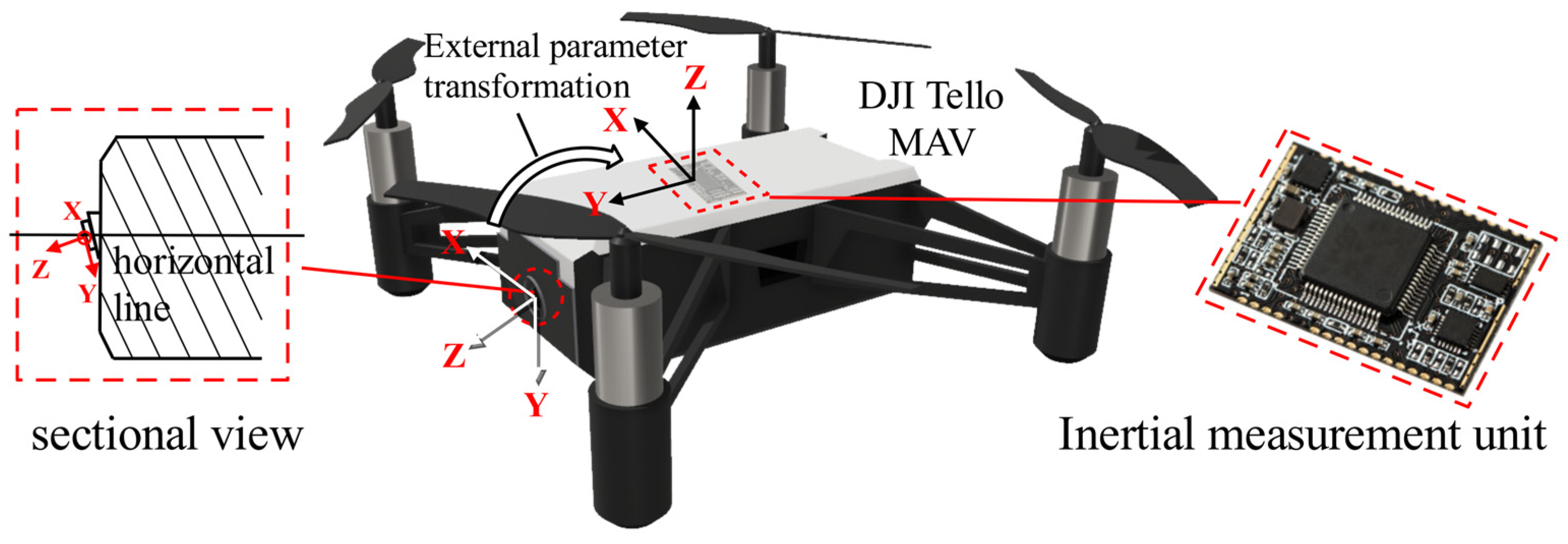
3.3. Camera-IMU Extrinsic Calibration Method Based on MAV
3.4. Autonomous Landing Module for MAV
4. Experiments
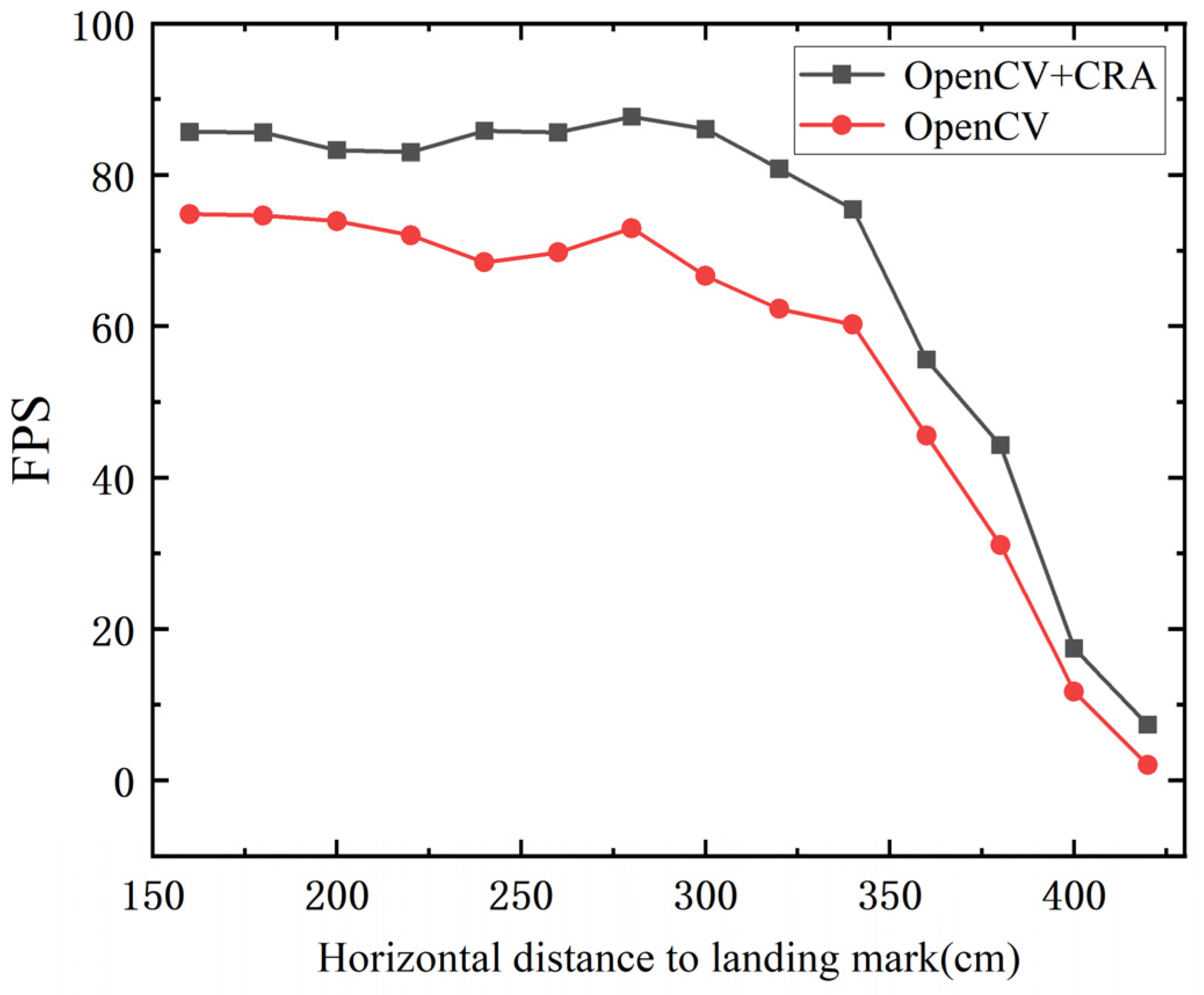
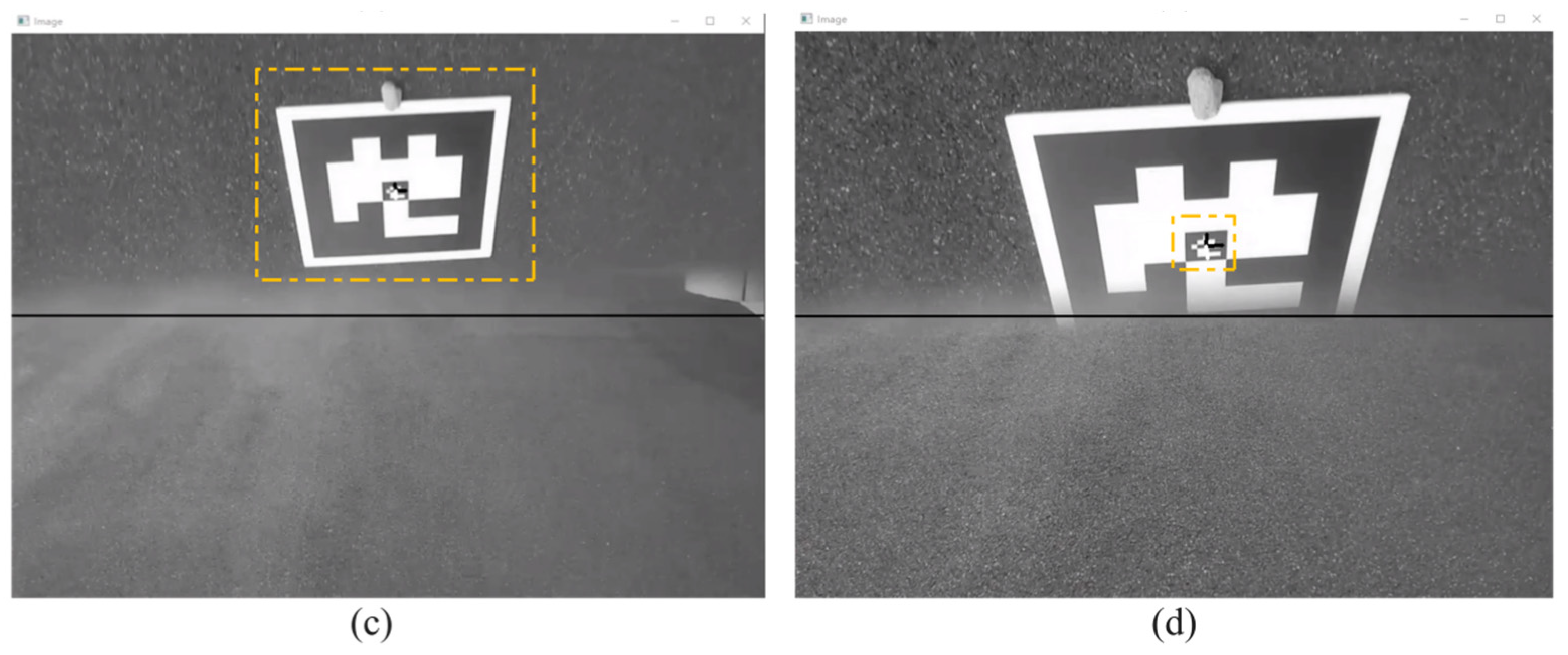
4.1. Landing Marker Detection Experiment
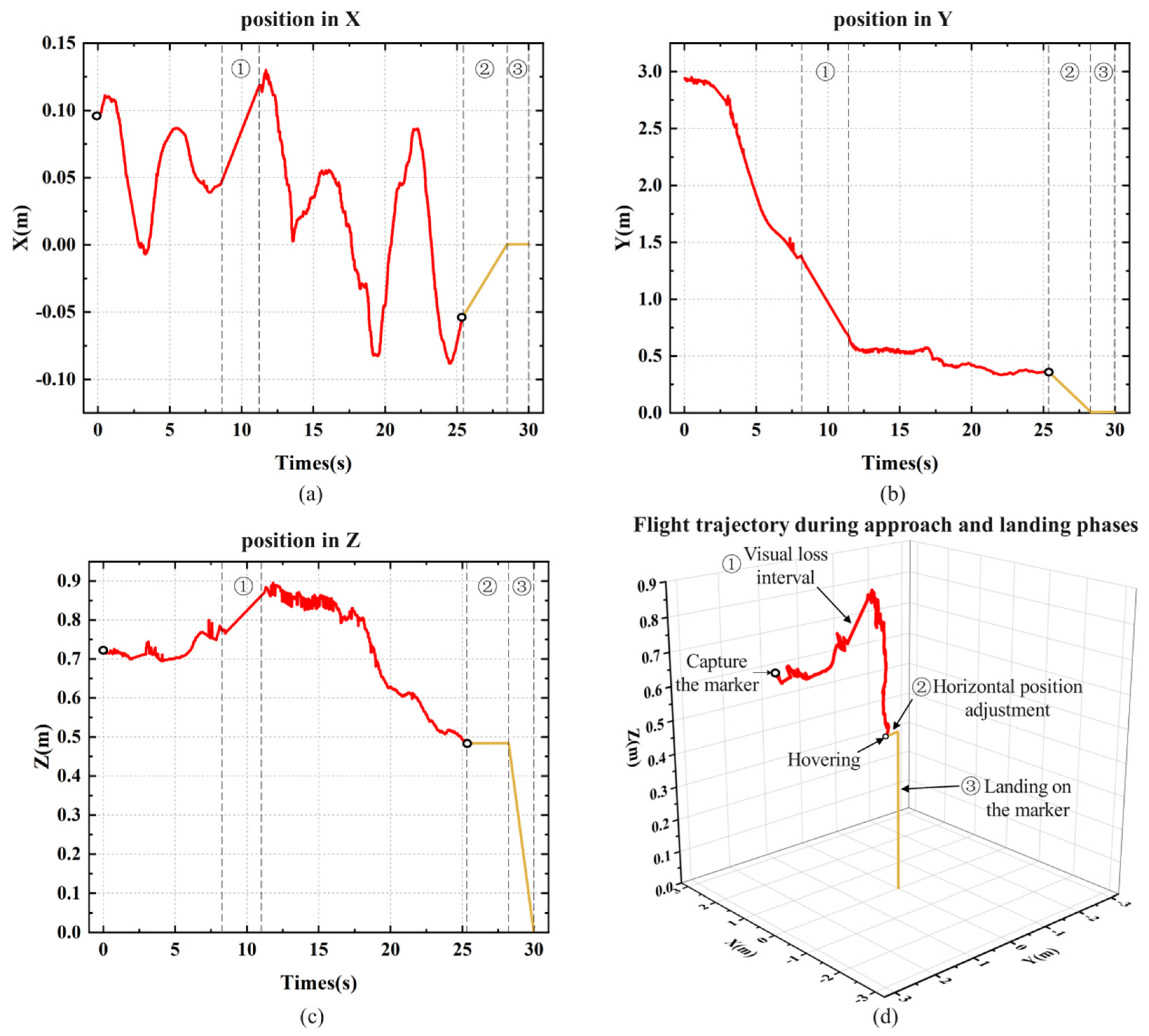
4.2. Indoor Autonomous Landing Experiment
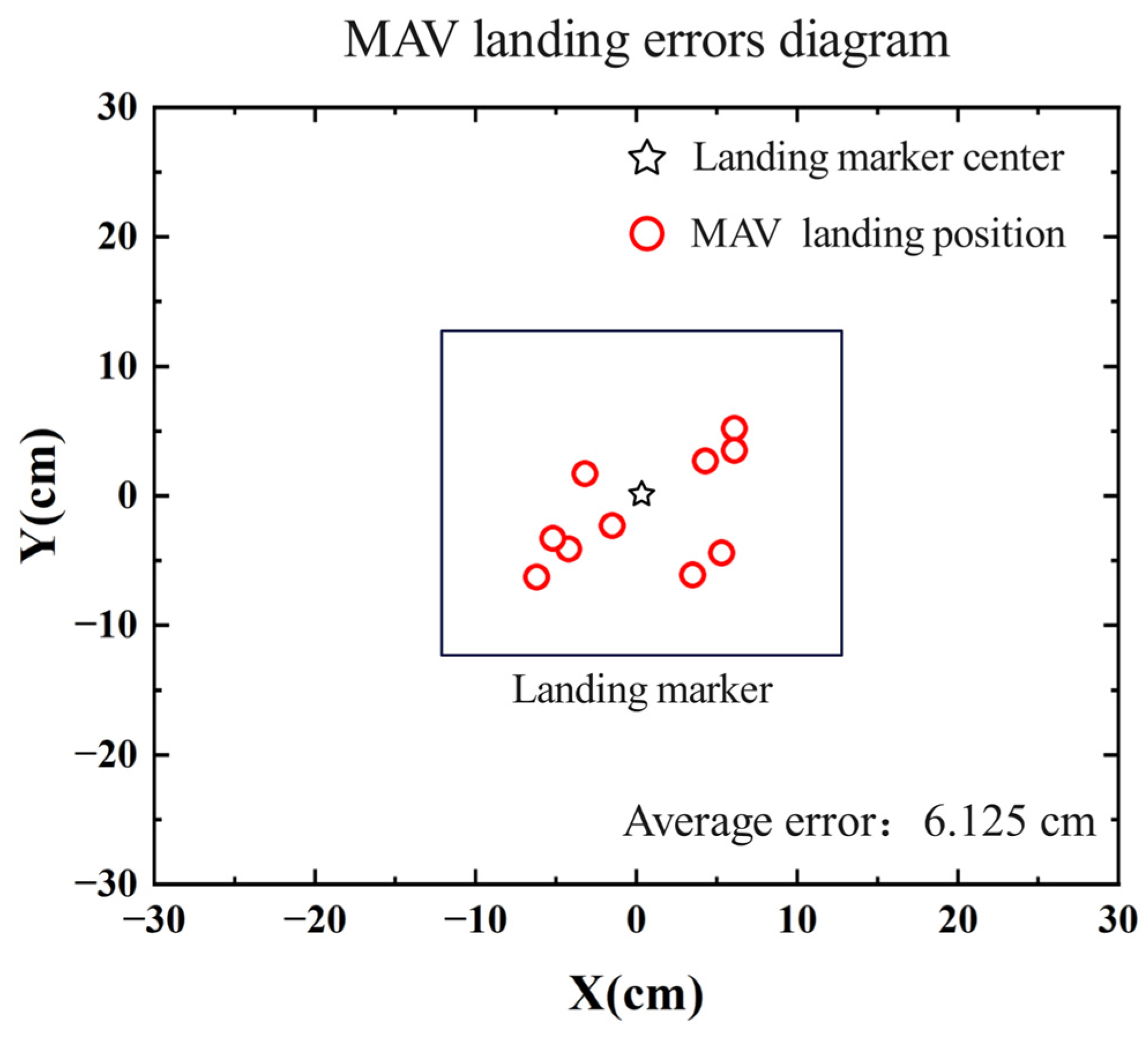
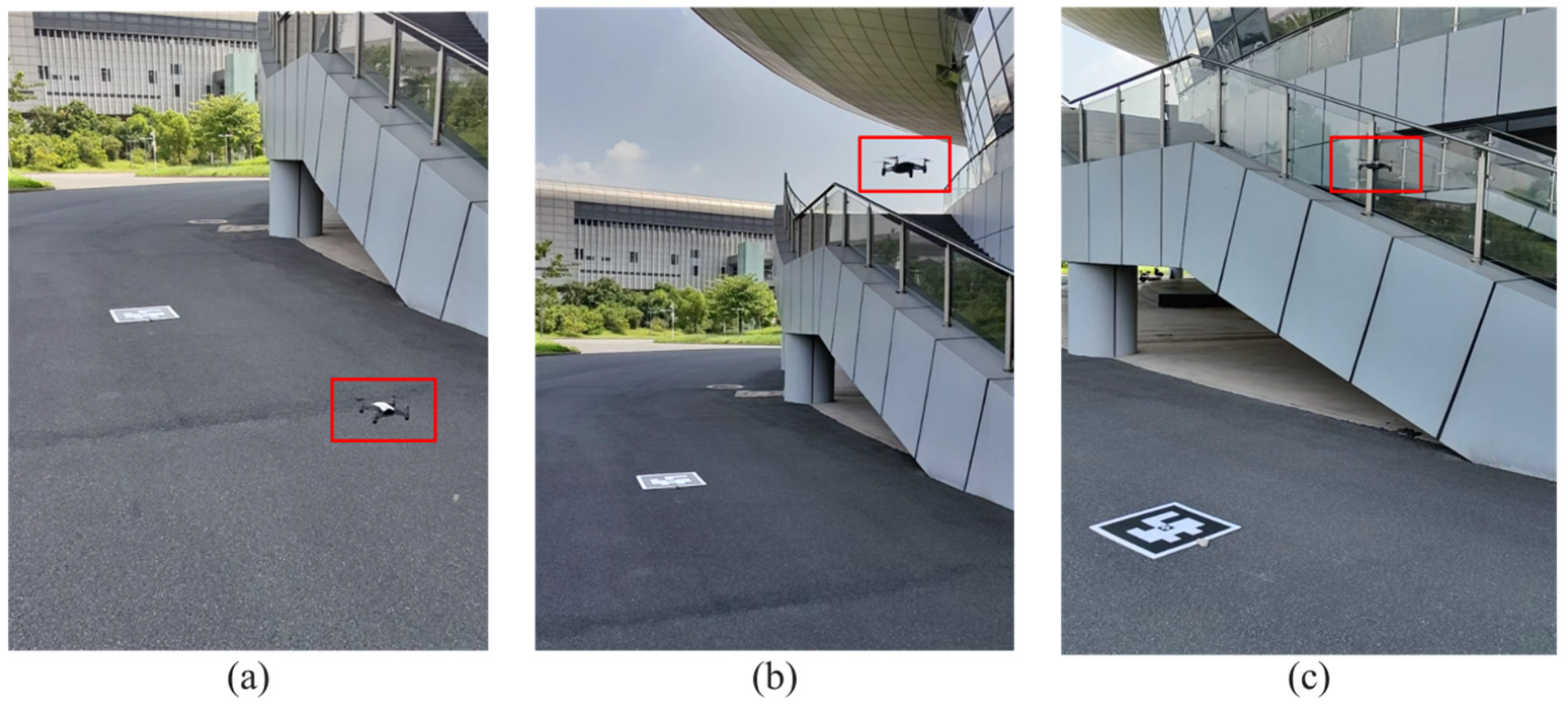
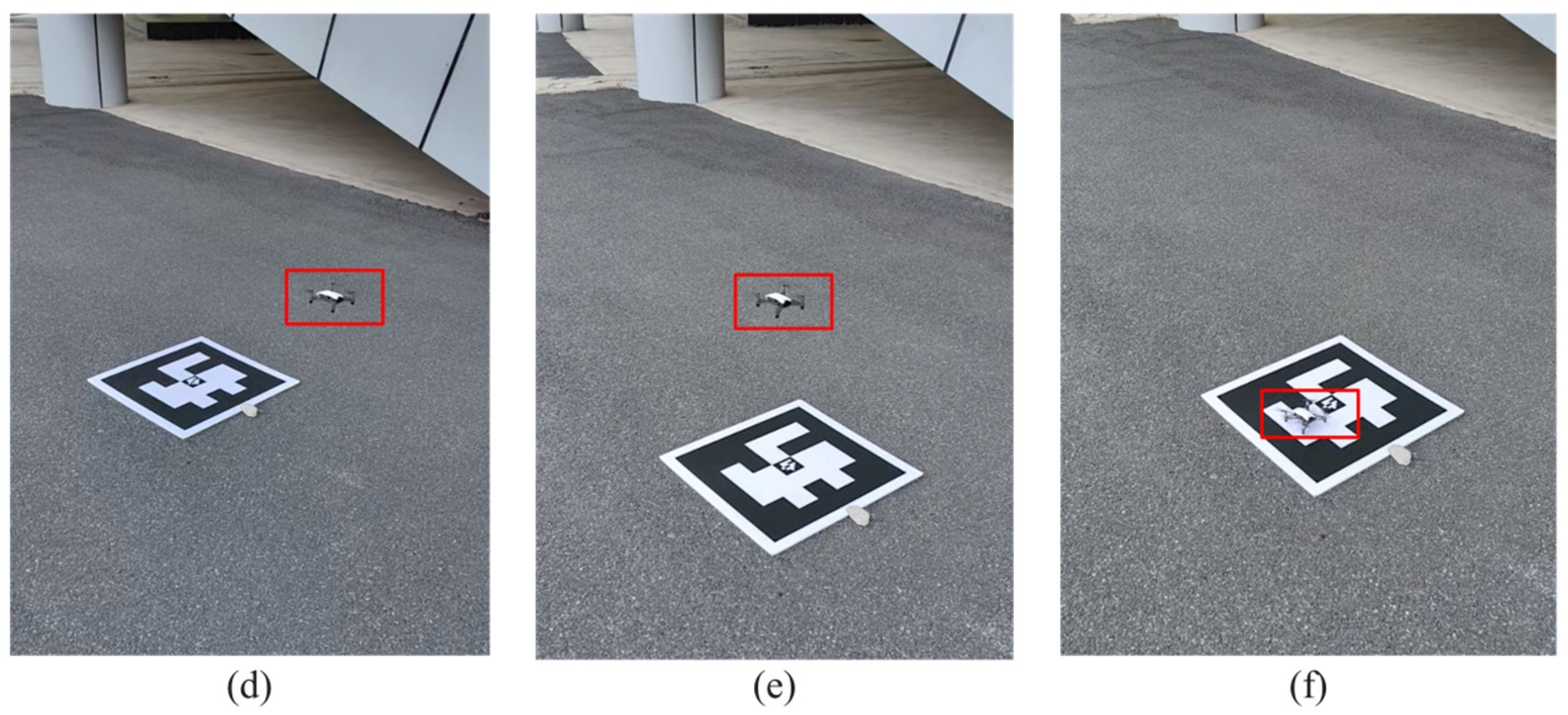
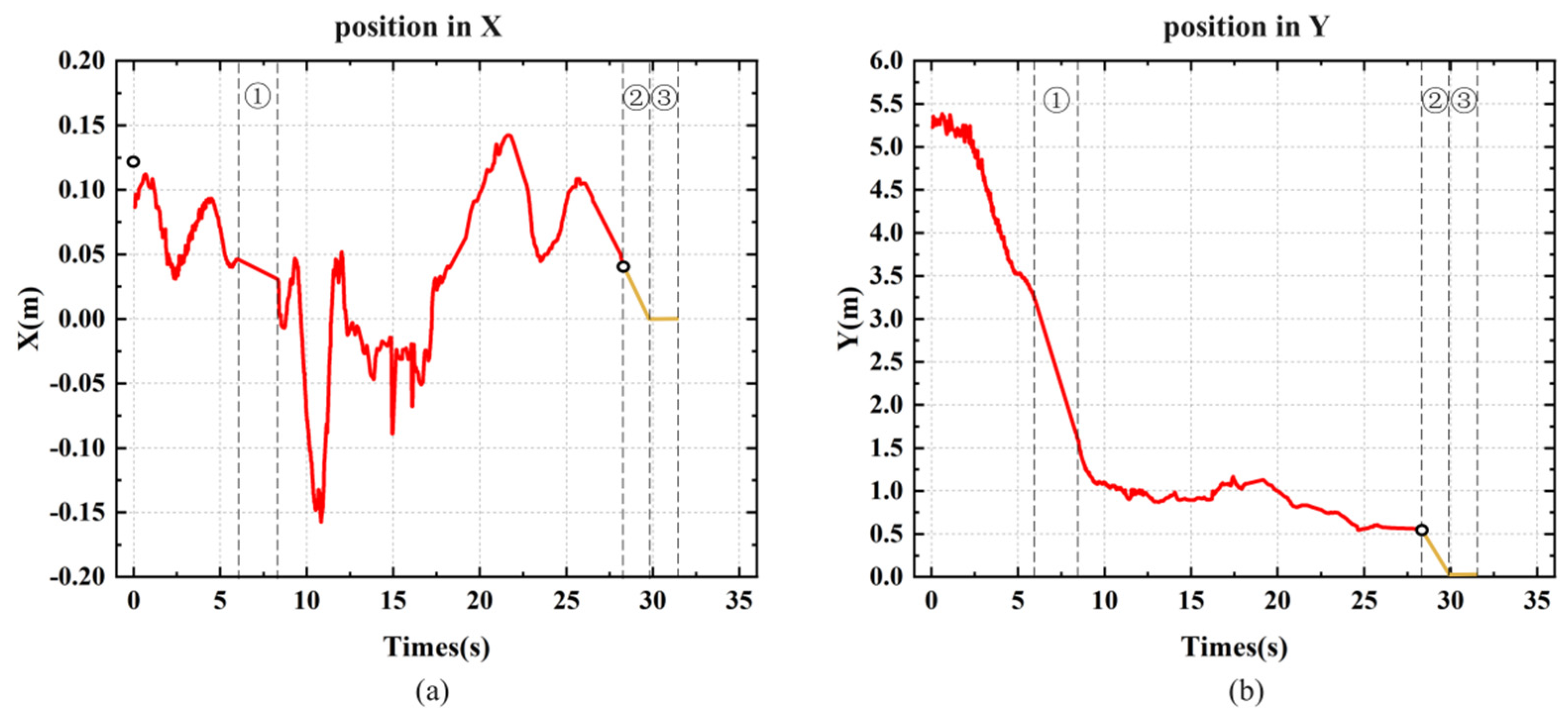
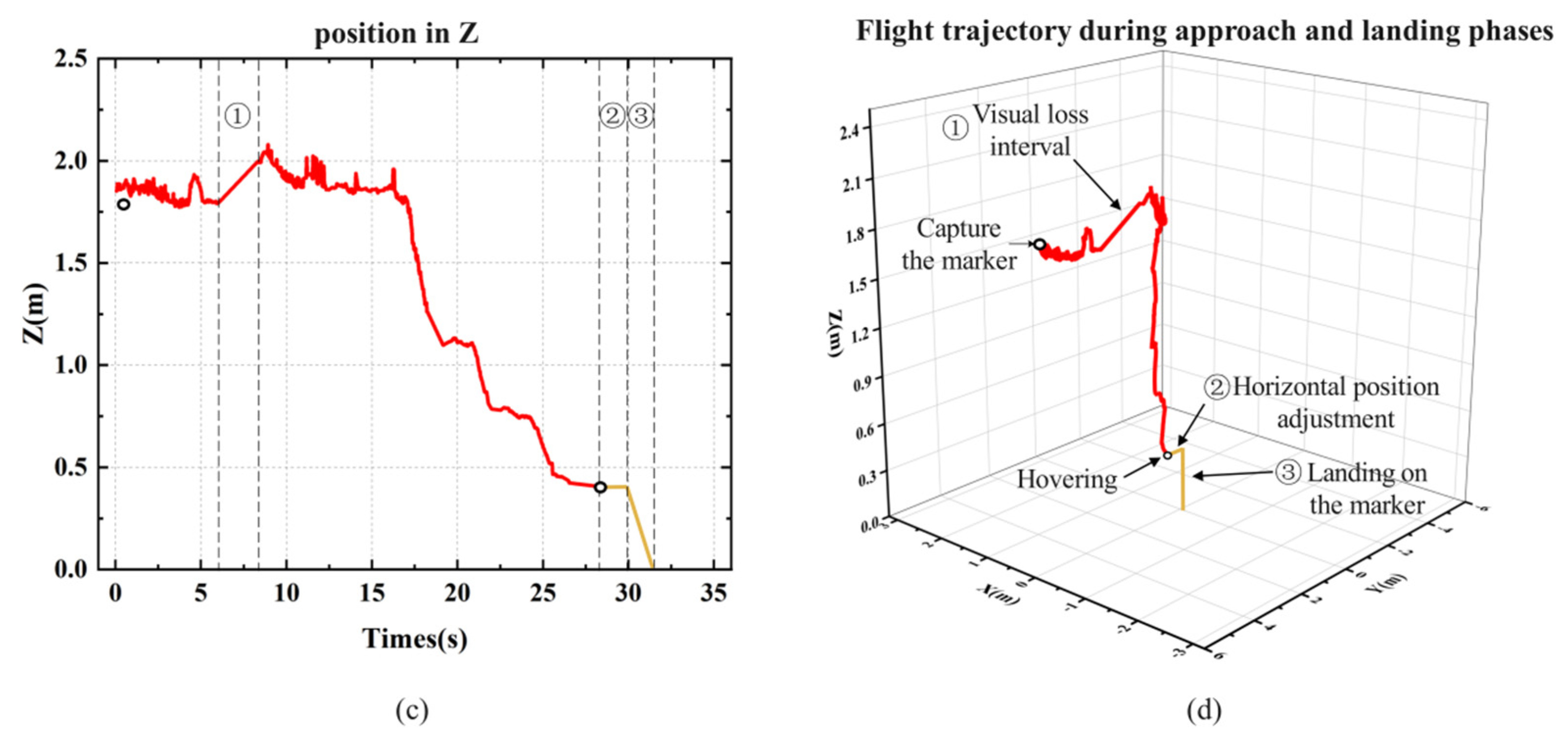
4.3. Outdoor Autonomous Landing Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, L.; Yang, E.; Luo, C.; Ren, P. AMCD: An accurate deep learning-based metallic corrosion detector for MAV-based real-time visual inspection. J. Amb. Intel. Hum. Comp. 2023, 14, 8087–8098. [Google Scholar] [CrossRef]
- Lindqvist, B.; Kanellakis, C.; Mansouri, S.S.; Agha-mohammadi, A.A.; Nikolakopoulos, G. Compra: A compact reactive autonomy framework for subterranean mav based search-and-rescue operations. J. Intell. Robot. Syst. 2022, 105, 49. [Google Scholar] [CrossRef]
- Özaslan, T.; Loianno, G.; Keller, J.; Taylor, C.J.; Kumar, V.; Wozencraft, J.M.; Hood, T. Autonomous navigation and mapping for inspection of penstocks and tunnels with MAVs. IEEE Robot. Autom. Let. 2017, 2, 1740–1747. [Google Scholar] [CrossRef]
- Treccani, D.; Adami, A.; Fregonese, L. Drones and Real-Time Kinematic Base Station Integration for Documenting Inaccessible Ruins: A Case Study Approach. Drones 2024, 8, 268. [Google Scholar] [CrossRef]
- Dong, X.; Gao, Y.; Guo, J.; Zuo, S.; Xiang, J.; Li, D.; Tu, Z. An integrated UWB-IMU-vision framework for autonomous approaching and landing of UAVs. Aerospace 2022, 9, 797. [Google Scholar] [CrossRef]
- Kong, W.; Zhang, D.; Wang, X.; Xian, Z.; Zhang, J. Autonomous landing of an UAV with a ground-based actuated infrared stereo vision system. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 2963–2970. [Google Scholar]
- Huang, C.M.; Chiang, M.L.; Hung, T.S. Visual servoing of a micro quadrotor landing on a ground platform. Int. J. Control Autom. 2017, 15, 2810–2818. [Google Scholar] [CrossRef]
- Pavlenko, T.; Schütz, M.; Vossiek, M.; Walter, T.; Montenegro, S. Wireless local positioning system for controlled UAV landing in GNSS-denied environment. In Proceedings of the 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Turin, Italy, 19–21 June 2019; pp. 171–175. [Google Scholar]
- Chen, X.; Phang, S.K.; Shan, M.; Chen, B.M. System integration of a vision-guided UAV for autonomous landing on moving platform. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 761–766. [Google Scholar]
- Yang, T.; Ren, Q.; Zhang, F.; Xie, B.; Ren, H.; Li, J.; Zhang, Y. Hybrid camera array-based uav auto-landing on moving ugv in gps-denied environment. Remote Sens. 2018, 10, 1829. [Google Scholar] [CrossRef]
- Badakis, G.; Koutsoubelias, M.; Lalis, S. Robust precision landing for autonomous drones combining vision-based and infrared sensors. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; pp. 1–6. [Google Scholar]
- Lin, S.; Jin, L.; Chen, Z. Real-time monocular vision system for UAV autonomous landing in outdoor low-illumination environments. Sensors 2021, 21, 6226. [Google Scholar] [CrossRef]
- He, G.; Jangir, Y.; Geng, J.; Mousaei, M.; Bai, D.; Scherer, S. Image-based visual servo control for aerial manipulation using a fully-actuated UAV. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 5042–5049. [Google Scholar]
- Debele, Y.; Shi, H.Y.; Wondosen, A.; Warku, H.; Ku, T.W.; Kang, B.S. Vision-Guided Tracking and Emergency Landing for UAVs on Moving Targets. Drones 2024, 8, 182. [Google Scholar] [CrossRef]
- Patruno, C.; Nitti, M.; Petitti, A.; Stella, E.; D’Orazio, T. A vision-based approach for unmanned aerial vehicle landing. J. Intell. Robot. Syst. 2019, 95, 645–664. [Google Scholar] [CrossRef]
- Wendel, A.; Maurer, M.; Katusic, M.; Bischof, H. Fuzzy visual servoing for micro aerial vehicles. In Proceedings of the Austrian Robotics Workshop, Graz, Austria, 3–4 May 2012; pp. 71–78. [Google Scholar]
- Yang, S.; Scherer, S.A.; Zell, A. An Onboard Monocular Vision System for Autonomous Takeoff, Hovering and Landing of a Micro Aerial Vehicle. J. Intell. Robot. Syst. 2013, 69, 499–515. [Google Scholar] [CrossRef]
- Demirhan, M.; Premachandra, C. Development of an automated camera-based drone landing system. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Bi, Y.; Li, J.; Qin, H.; Lan, M.; Shan, M.; Lin, F.; Chen, B.M. An MAV localization and mapping system based on dual realsense cameras. In Proceedings of the 2016 International Micro Air Vehicle Conference and Competition, Beijing, China, 17–21 October 2016; pp. 50–55. [Google Scholar]
- Zhao, Z.; Han, P.; Xu, Y.; Xie, W.; Zhang, W.; Liang, K.; Zeng, Q. Vision-based autonomous landing control of a multi-rotor aerial vehicle on a moving platform with experimental validations. IFAC-PapersOnLine 2022, 55, 1–6. [Google Scholar] [CrossRef]
- Zou, J.T.; Dai, X.Y. The development of a visual tracking system for a drone to follow an omnidirectional mobile robot. Drones 2022, 6, 113. [Google Scholar] [CrossRef]
- Lee, D.; Park, W.; Nam, W. Autonomous landing of micro unmanned aerial vehicles with landing-assistive platform and robust spherical object detection. Appl. Sci. 2021, 11, 8555. [Google Scholar] [CrossRef]
- Nguyen, P.T.; Westerlund, T.; Peña Queralta, J. Vision-based safe autonomous UAV docking with panoramic sensors. Front. Robot. AI 2023, 10, 1223157. [Google Scholar] [CrossRef]
- Dotenco, S.; Gallwitz, F.; Angelopoulou, E. Autonomous approach and landing for a low-cost quadrotor using monocular cameras. In Proceedings of the European Conference on Computer Vision Workshops, Zurich, Switzerland, 6–12 September 2014; pp. 209–222. [Google Scholar]
- Mu, L.; Li, Q.; Wang, B.; Zhang, Y.; Feng, N.; Xue, X.; Sun, W. A Vision-Based Autonomous Landing Guidance Strategy for a MAV by the Modified Camera View. Drones 2023, 7, 400. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Xie, M. A robust O(n) solution to the perspective-n-point problem. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1444–1450. [Google Scholar] [CrossRef]
- Liang, X.; Cheng, X.; Tan, H.; Huang, Y.; Li, X. Camera-IMU extrinsic calibration method based on intermittent sampling and RANSAC optimization. Meas. Sci. Technol. 2024, 35, 085118. [Google Scholar] [CrossRef]
- Gautam, A.; Singh, M.; Sujit, P.B.; Saripalli, S. Autonomous quadcopter landing on a moving target. Sensors 2022, 22, 1116. [Google Scholar] [CrossRef]
- Wubben, J.; Fabra, F.; Calafate, C.T.; Krzeszowski, T.; Marquez-Barja, J.M.; Cano, J.C.; Manzoni, P. Accurate landing of unmanned aerial vehicles using ground pattern recognition. Electronics 2019, 8, 1532. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 160 cm | 180 cm | 200 cm | 220 cm | 240 cm | 260 cm | 280 cm | |
| OpenCV + CRA (FPS) | 85.65 | 85.59 | 83.24 | 82.96 | 85.80 | 85.60 | 86.02 |
| OpenCV (FPS) | 74.82 | 74.63 | 73.88 | 72.03 | 68.44 | 69.74 | 72.94 |
| 300 cm | 320 cm | 340 cm | 360 cm | 380 cm | 400 cm | 420 cm | |
| OpenCV + CRA (FPS) | 86.02 | 80.78 | 75.44 | 55.60 | 44.29 | 17.43 | 7.36 |
| OpenCV (FPS) | 66.62 | 62.29 | 60.21 | 45.56 | 31.12 | 11.76 | 2.02 |
| STEP 1 | STEP 2 | STEP 3 | STEP 4 | Total | |
|---|---|---|---|---|---|
| 1 | 15.59 | 8.89 | 2.01 | 3.02 | 29.51 |
| 2 | 20.71 | 13.20 | 2.31 | 3.21 | 39.43 |
| 3 | 16.20 | 12.98 | 2.51 | 3.21 | 34.90 |
| 4 | 16.64 | 11.53 | 2.21 | 3.32 | 33.70 |
| 5 | 17.20 | 6.73 | 2.11 | 3.52 | 29.56 |
| 6 | 14.85 | 12.21 | 2.11 | 2.91 | 32.08 |
| 7 | 12.84 | 10.30 | 2.31 | 3.82 | 29.27 |
| 8 | 17.01 | 13.30 | 2.12 | 3.22 | 35.65 |
| 9 | 18.86 | 14.61 | 2.41 | 3.42 | 39.30 |
| 10 | 14.33 | 11.84 | 2.41 | 3.22 | 31.80 |
| Average | 16.42 | 11.56 | 2.25 | 3.29 | 33.52 |
| Units: s |
| Methods | Ref. [24] | Ref. [25] | Ref. [28] | Ref. [29] | Ours |
|---|---|---|---|---|---|
| field-of-view | Forward & Top | Top | Top | None | Forward & Top |
| Accuracy [m] | 0.16 | 0.05 | 0.15 | 1–3 | 0.06 |
| Distance [m] | 1.2 | 2 | 20 | 20 | 4 |
| Marker Size [cm] | r = 13.5 | 22.5 × 17.5 | 80 × 80 | None | 25 × 25 |
| Vision Resolution | 1280 × 720 | 1280 × 720 | None | None | 960 × 720 |
| Outdoor | No | Yes | Yes | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Liang, X.; Li, X.; Liu, Z.; Tan, H. Autonomous Landing Strategy for Micro-UAV with Mirrored Field-of-View Expansion. Sensors 2024, 24, 6889. https://doi.org/10.3390/s24216889
Cheng X, Liang X, Li X, Liu Z, Tan H. Autonomous Landing Strategy for Micro-UAV with Mirrored Field-of-View Expansion. Sensors. 2024; 24(21):6889. https://doi.org/10.3390/s24216889
Chicago/Turabian StyleCheng, Xiaoqi, Xinfeng Liang, Xiaosong Li, Zhimin Liu, and Haishu Tan. 2024. "Autonomous Landing Strategy for Micro-UAV with Mirrored Field-of-View Expansion" Sensors 24, no. 21: 6889. https://doi.org/10.3390/s24216889
APA StyleCheng, X., Liang, X., Li, X., Liu, Z., & Tan, H. (2024). Autonomous Landing Strategy for Micro-UAV with Mirrored Field-of-View Expansion. Sensors, 24(21), 6889. https://doi.org/10.3390/s24216889