
Multi-Objective Design and Optimization of Hardware-Friendly Grid-Based Sparse MIMO Arrays

 ,
, 
Abstract
1. Introduction
2. Classification of Antenna Arrays
3. Sparse MIMO Radar Systems
3.1. Creation of Virtual Arrays
3.2. Transmitting Grid-Based Sparse Antennas
3.3. Receiving Grid-Based Sparse MIMO Antenna Arrays
4. Angle Beamforming
5. Multi-Objective Design and Optimization of Grid-Based Sparse Arrays
5.1. Optimizing Parameters
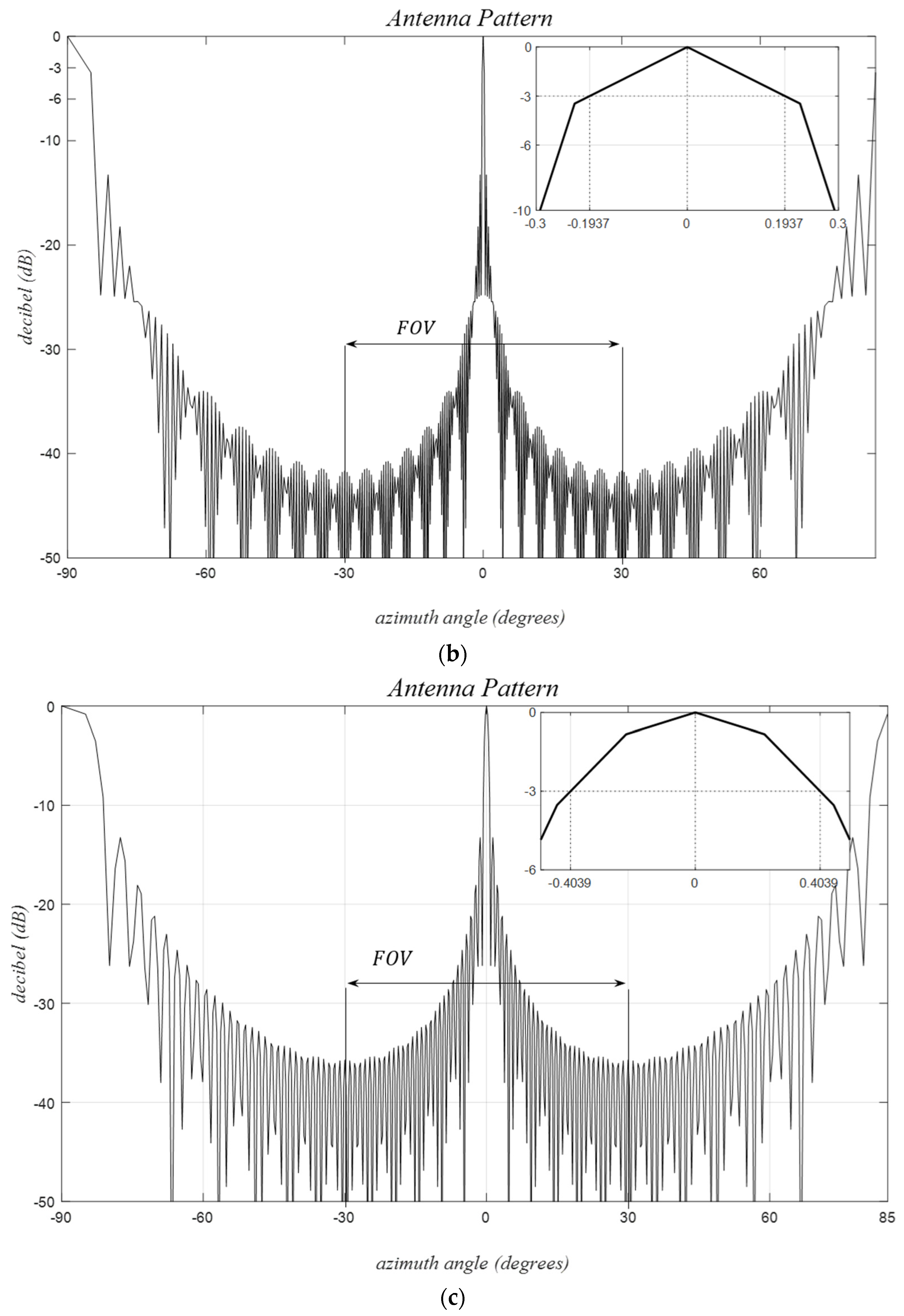
- A usable field of view (uFOV): The maximum grating lobe-free angular extent around the broadside, beyond which lies a flipped replica of the interior pattern that carries no additional information about the target.
- Beamwidth (BW): The desired angular width of the main lobe of the antenna pattern.
- Total number of physical elements (NTX and NRX): The count of both transmitting (TX) and receiving (RX) elements in the antenna array.
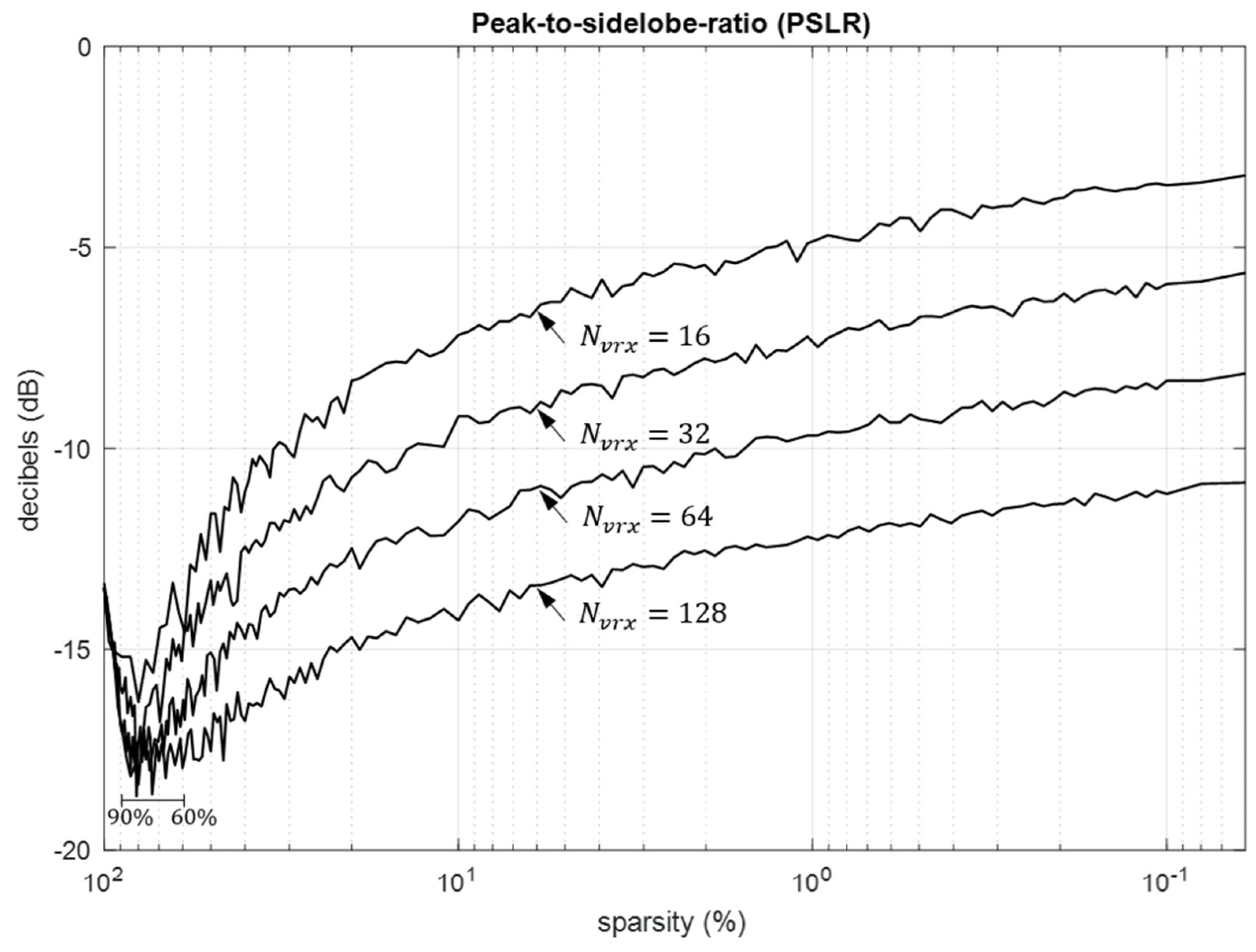
- Peak-to-sidelobe ratio (PSLR): A measure of the maximum amplitude of the main lobe relative to the sidelobes.
- Physical size limitations: The TX and the RX antenna elements in practice have finite physical dimensions, namely their width and height, which impose constraints on the minimum inter-element spacing values. These spacing values limit the horizontal and vertical uFOV values, respectively. Densely packed ULAs and URAs are directly affected by this limitation, especially when any size dimension is larger than .
- Mutual coupling: The TX and RX groups should often be physically separated to decrease inter-group mutual coupling [1]. Mutual coupling among the same types of elements is assumed to be calibrated digitally.
- Antenna element sharing of different arrays: In multi-functional radars, some of the TX and RX elements are often shared between different scan modes. The antenna array design and optimization for all scans need to be performed simultaneously. A practical approach involves forcing the physical elements for a simpler scan mode to be used in some other complicated antenna configuration, effectively utilizing the array aperture.
- Hardware implementation constraints: Antenna elements are fed by transmission lines or waveguide structures, usually implemented on a separate neighboring hardware board. The layouts of transmitted and received signals should also be fed from another layer. As a design choice, a central region can be preferred to keep all the transmission lines approximately equal in length. This central region needs to be defined as a forbidden zone for the array elements.
- i.
- Peak-to-sidelobe ratio (PSLR):
- ii.
- Beamwidth for uniform arrays:
- iii.
- Sidelobes, Grating lobes, and Usable FOV for sparse arrays:
5.2. Design and Optimization of Grid-Based Sparse Arrays
| Algorithm 1: Sparse array optimization |
| desired parameters: |
| • array dimension (1D/2D/3D) and let us assume 1D as an example. |
| • available number of TX and RX elements, Ntx, Nrx, respectively, |
| • uFOV, and BW both for azimuth and elevation, |
| constraints: |
| • physical dimensions of antenna elements, wtx, htx, wrx, hrx |
| • forbidden zones for mutual coupling, ymc, zmc |
| • enforced element positions |
| initialize k = 0: |
| • calculate the required virtual aperture length, 2Yλ,max using (27) and (28) |
| • calculate the required minimum inter-element spacings, ∆dλ,min using (29) and (30) |
| • determine reference grid space, yn |
| • set positions to the enforced list of positions |
| • (optional HIA): calculate a uniformly distributed set of ∆dλ |
| iterate k until (k < Kmax) or (PSLRbest > PSLRdesired) |
| • random shuffling and random perturbations of |
| • add non-overlapping TX and RX positions satisfying constraints until all positions are calculated |
| • calculate the received signal pattern, and calculate the PSLR, |
| • update array positions and PSLRbest if PSLRnew < PSLRbest |
| end |
| repeat: outer loop is used if desired and hyperparameters are also optimized for a given range of values. |
- i.
- Low-discrepancy (LD) Inter-element Spacings:
- ii.
- Sparse arrays with minimized mutual coupling:
- iii.
- Efficient design of virtual arrays:
- Virtual Aperture Efficiency ():
- Beamwidth Spreading Factor ():
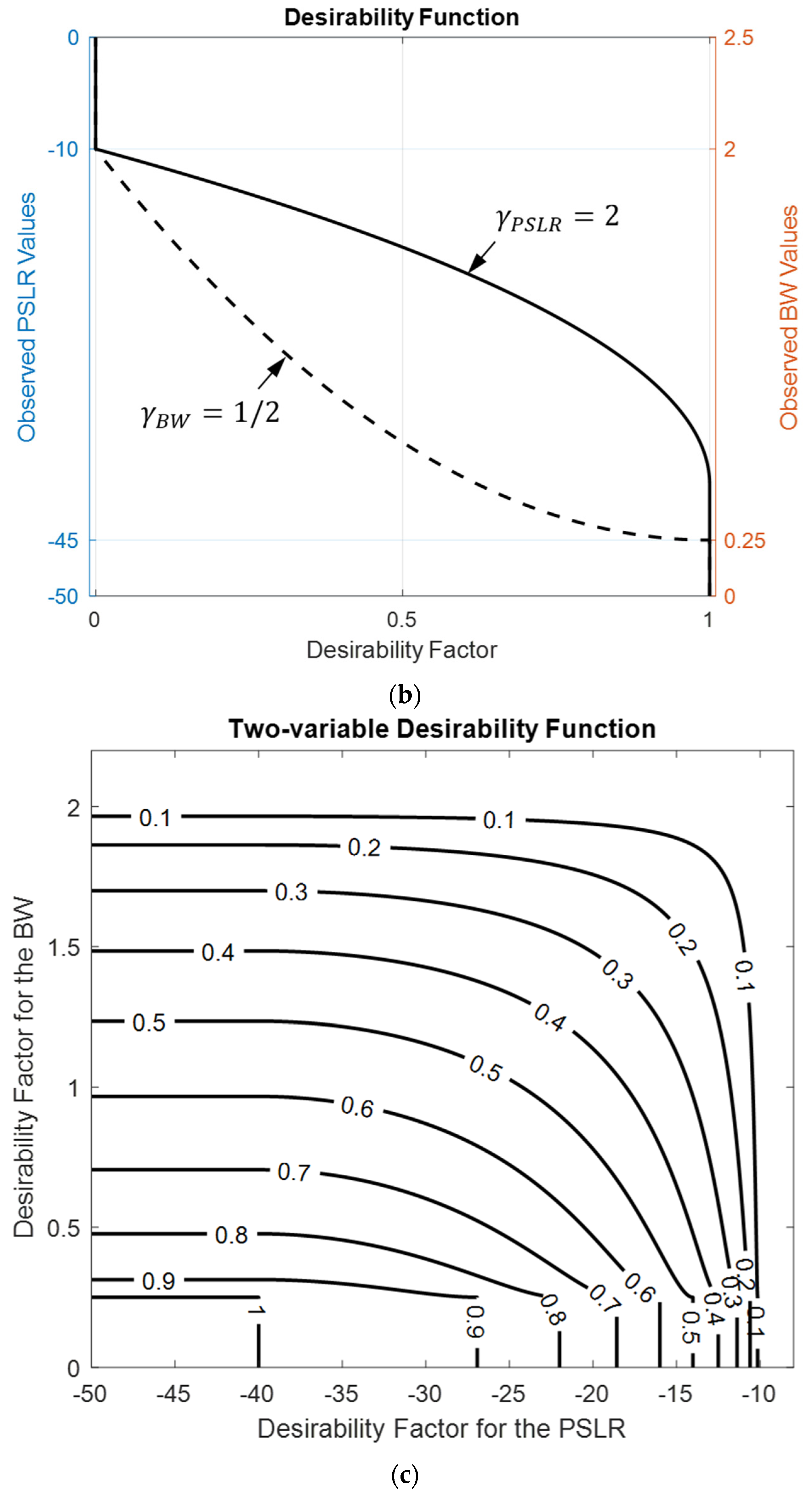
5.3. Multi-Objective Optimization of Sparse Arrays Using the Desirability Function
5.4. Adaptive Desirability Function for Learning of Hyperparameters
5.5. Disadvantages of Sparse Arrays
6. Results
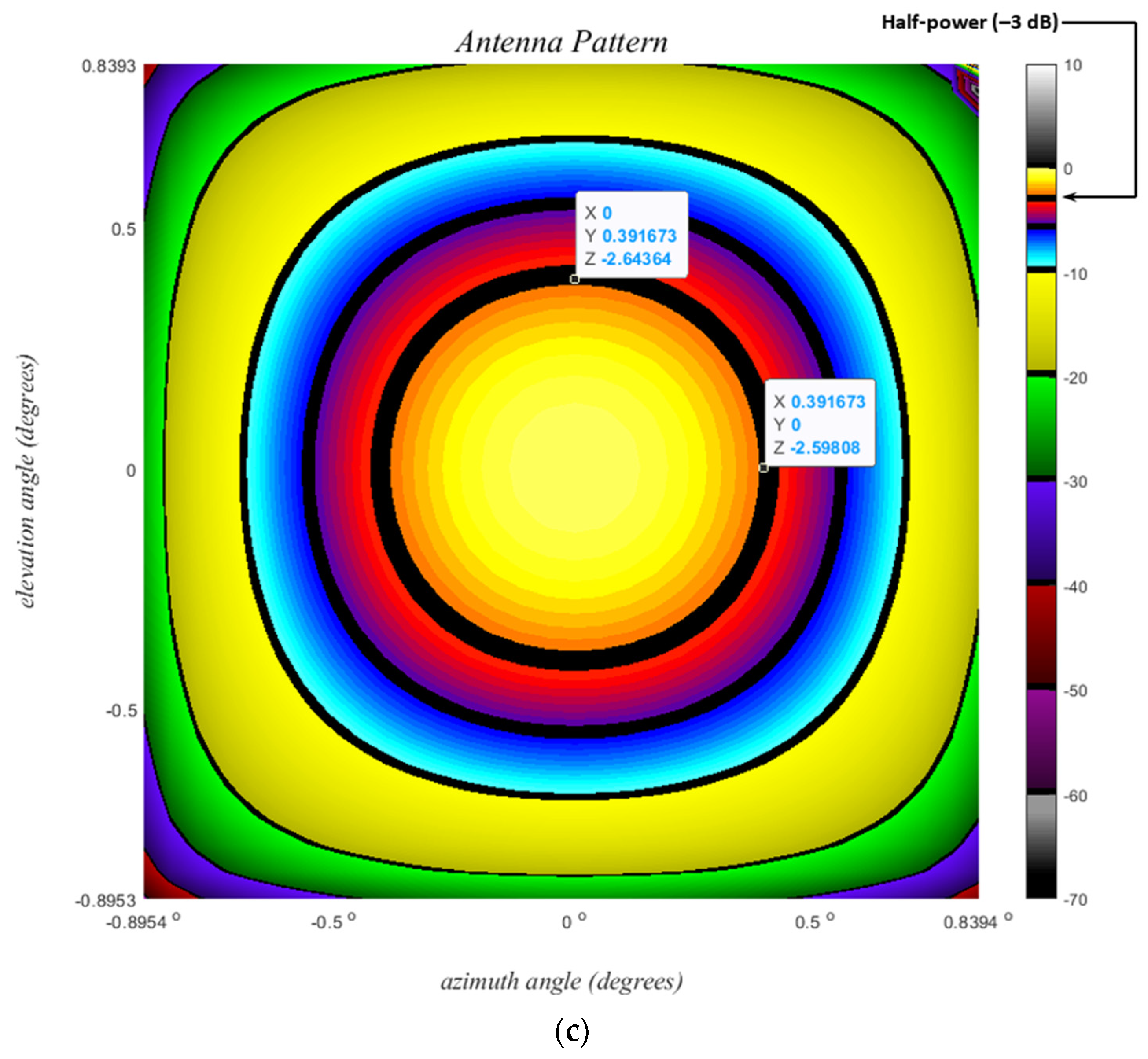
6.1. Fully Populated Uniform Arrays
6.2. Grid-Based Sparse Arrays (GBSA) with Large Antenna Elements
- i.
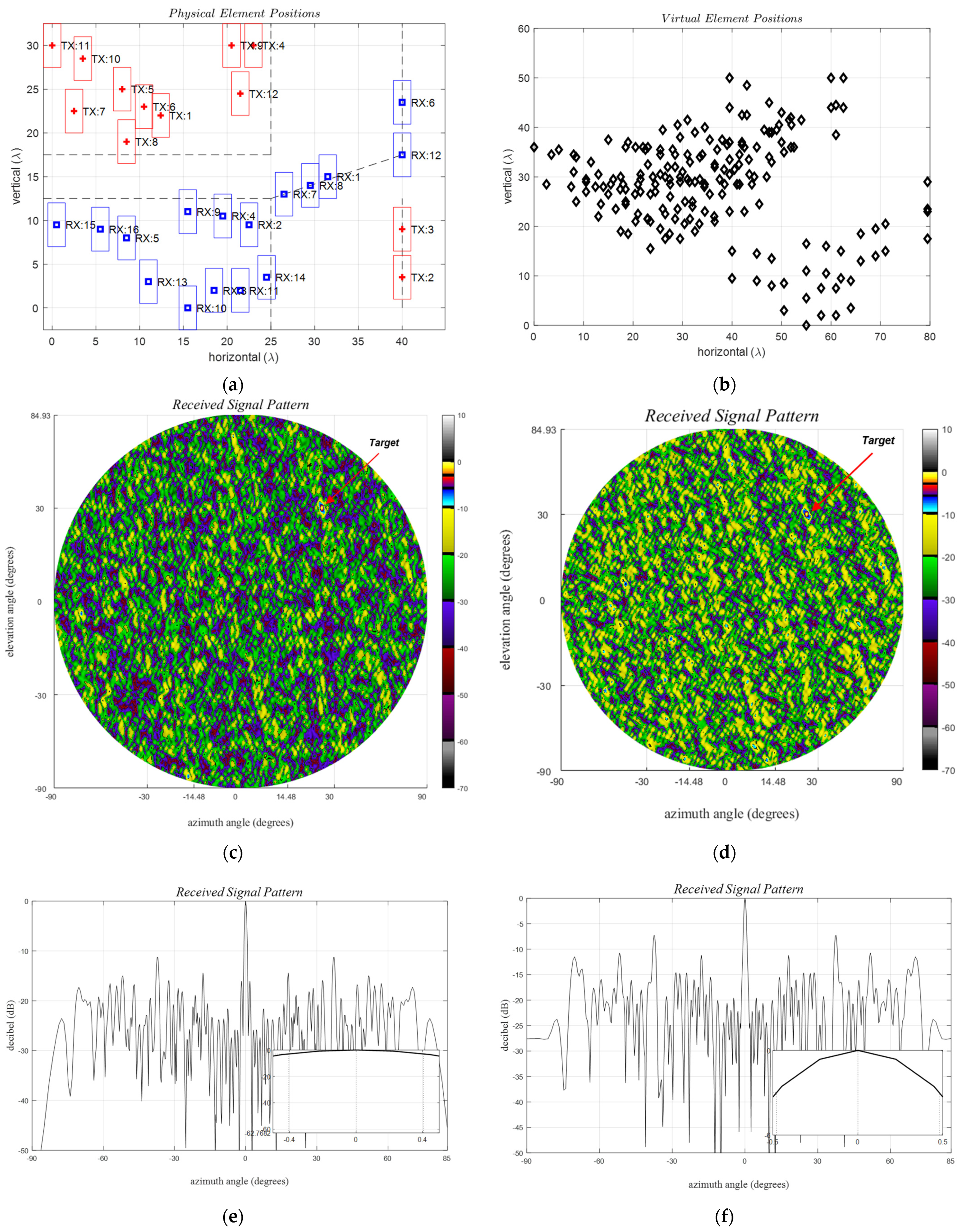
- GBSA with no forbidden zones: Ankara–1 A and B arrays
- ii.
- Inter-element mutual coupling for sparse Ankara-1 array:
- iii.
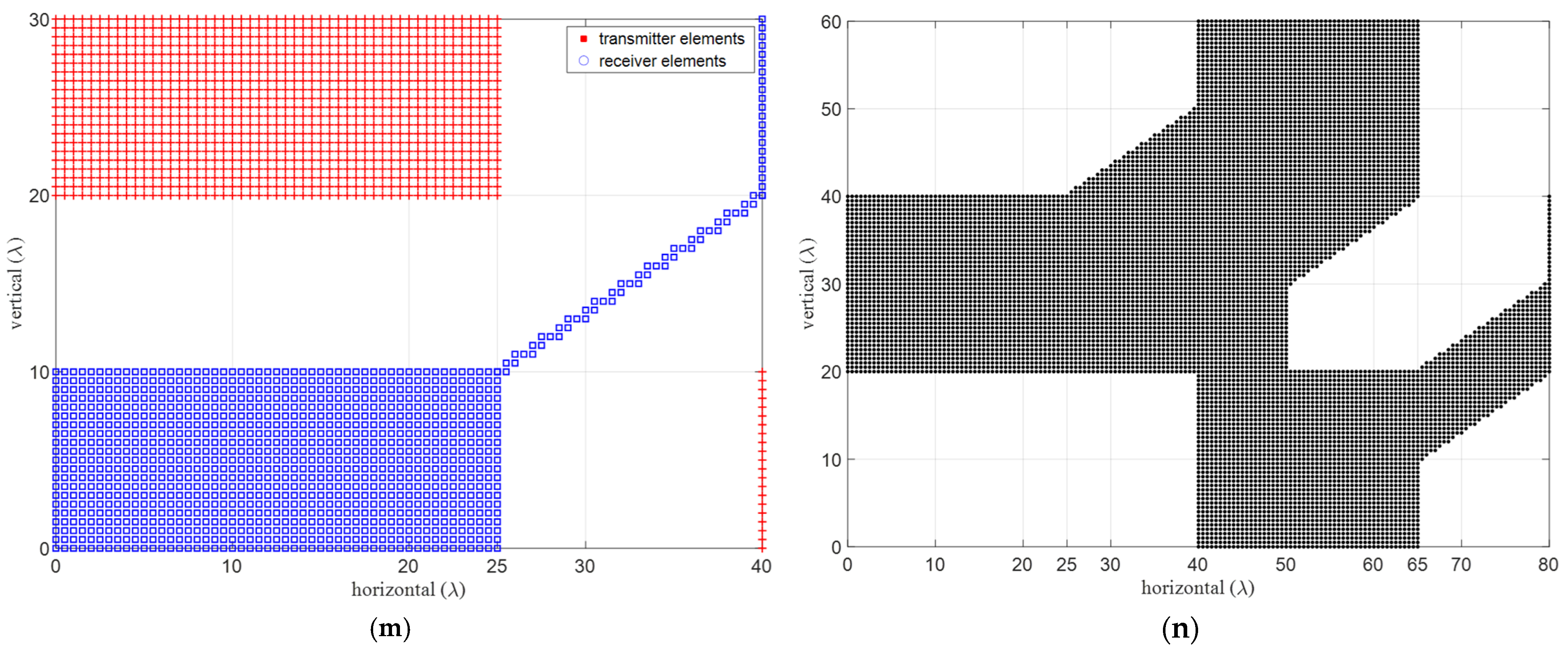
- GBSA with forbidden zones: Ankara–2 A and B arrays
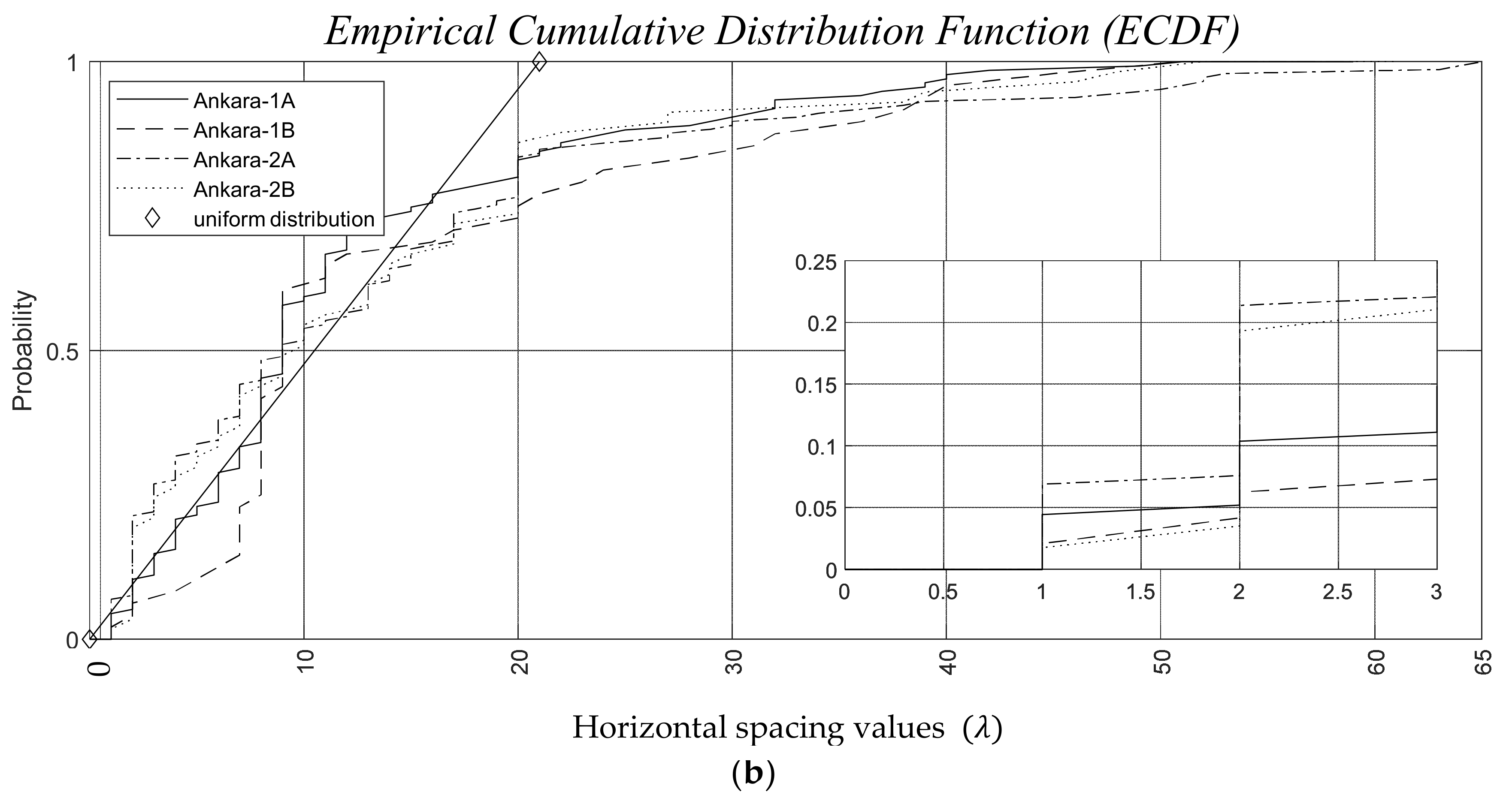
6.3. The Empirical Cumulative Distribution Functions (ECDFs) for the Inter-Element Spacings
6.4. Hardware Efficiency of Grid-Based Sparse Arrays
6.5. Fast Convergent Sparse Array Optimization Using Structured Methods
7. Conclusions
8. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. A Radiating Antenna Aperture
Appendix A.2. A Receiving Sparse MIMO Antenna Array
References
- Zheng, Z.; Wang, W.; Kong, Y.; Zhang, Y.D. MISC array: A new sparse array design achieving increased degrees of freedom and reduced mutual coupling effect. IEEE Trans. Signal Process. 2019, 67, 1728–1741. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Liao, B.; Madanayake, A.; Agathoklis, P. Array signal processing and systems. Multidim. Syst. Sign. Process. 2018, 29, 467–473. [Google Scholar] [CrossRef]
- Catreux, S.; Driessen, P.F.; Greenstein, L.J. Data throughputs using multiple-input multiple-output (mimo) techniques in a noise-limited cellular environment. IEEE Trans. Wirel. Commun. 2002, 1, 226–235. [Google Scholar] [CrossRef]
- Chen, Z.; Yan, F.; Qiao, X.; Zhao, Y. Sparse Antenna Array Design for MIMO Radar Using Multiobjective Differential Evolution. Int. J. Antennas Propagat. 2016, 2016, 1747843. [Google Scholar] [CrossRef]
- Yang, M.; Sun, L.; Yuan, X.; Chen, B. A New Nested MIMO Array with Increased Degrees of Freedom and Hole-Free Difference Coarray. IEEE Signal Process. Lett. 2018, 25, 40–44. [Google Scholar] [CrossRef]
- Dong, J.; Liu, F.; Jiang, Y.; Hu, B.; Shi, R. Minimum redundancy MIMO array design using cyclic permutation of perfect distance (CPPD). In Proceedings of the 2014 XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014. [Google Scholar]
- Wang, X.; Wang, X. Hole Identification and Filling in k-times Extended Co-prime Arrays for Highly-Efficient DOA Estimation. IEEE Trans. Signal Process. 2019, 67, 2693–2706. [Google Scholar] [CrossRef]
- Rajamaki, R.; Koivunen, V. Sparse Linear Nested Array for Active Sensing. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos Island, Greece, 28 August–2 September 2017. [Google Scholar]
- Haupt, R.L. Thinned arrays using genetic algorithms. IEEE Trans. Antennas Propagat. 1994, 42, 993–999. [Google Scholar] [CrossRef]
- Torres, T.; Alselmi, N.; Nayeri, P.; Rocca, P.; Haupt, R. Low discrepancy sparse phased array antennas. Sensors 2021, 21, 7816. [Google Scholar] [CrossRef]
- Bruce, N.; Stacey, J.; Driessen, P.F. Visibility domain direction-of-arrival optimization for arbitrary 2-D arrays. IEEE Access 2022, 10, 21646–21654. [Google Scholar] [CrossRef]
- Eghbali, R.; Rashidinejad, A.; Marvasti, F. Iterative methods with adaptive thresholding for sparse signal reconstruction. In Proceedings of the International Workshop on Sampling Theory and Applications (SampTA), Singapore, 2–6 May 2011. [Google Scholar]
- Tanyer, S.G.; Yilmaz, A.E.; Yaman, F. Adaptive desirability function for multiobjective design of thinned array antennas. J. Electromagn. Waves Appl. 2012, 26, 2410–2417. [Google Scholar] [CrossRef]
- Marvasti, F.; Amini, A.; Haddadi, F.; Soltanolkotabi, M.; Khalaj, B.H.; Aldroubi, A.; Holm, S.; Sanei, S.; Chambers, J. A Unified Approach to Sparse Signal Processing. EURASIP J. Adv. Signal Process. 2012, 2012, 44. [Google Scholar] [CrossRef]
- Ibrahim, M.; Ramireddy, V.; Lavrenko, A.; König, J.; Römer, F.; Landmann, M.; Grossmann, M.; Galdo, G.D.; Thomä, R.S. Design and analysis of compressive antenna arrays for direction of arrival estimation. Signal Process. 2017, 138, 35–47. [Google Scholar] [CrossRef]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source localization and sensing: A nonparametric iterative adaptive approach based on weighted least squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Ikram, M.Z.; Ali, M.; Wang, D. Joint Antenna-Array Calibration and Direction of Arrival Estimation for Automotive Radars. In Proceedings of the 2016 IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar]
- Hui, H.T.; Chan, K.Y.; Yung, E.K. Compensating for the Mutual Coupling Effect in a Normal-Mode Helical Antenna Array for Adaptive Nulling. IEEE Trans. Veh. Technol. 2003, 52, 743–751. [Google Scholar]
- Wu, X.H.; Kishk, A.A.; Glisson, A.W. Antenna Effects on a Monostatic MIMO Radar for Direction Estimation, a Cramèr-Rao Lower Bound Analysis. IEEE Trans. Antennas Propagat. 2011, 59, 2388–2395. [Google Scholar] [CrossRef]
- Qi, D.; Tang, M.; Chen, S.; Liu, Z. DOA estimation and self-calibration under unknown mutual coupling. Sensors 2019, 19, 978. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Li, Q. A Review of Mutual Coupling in MIMO Systems. IEEE Access 2018, 6, 24706–24719. [Google Scholar] [CrossRef]
- Singh, H.; Sneha, H.L.; Jha, R.M. Mutual Coupling in Phased Arrays: A Review. Int. J. Antennas Propagat. 2013, 2013, 348123. [Google Scholar] [CrossRef]
- Giannini, V.; Goldenberg, M.; Eshraghi, A.; Maligeorgos, J.; Lim, L.; Lobo, R.; Welland, D.; Chow, C.; Dornbusch, A.; Dupuis, T.; et al. A 192-virtual-receiver 77/79 GHz GMSK code-domain MIMO radar system-on-chip. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference—ISSCC, San Francisco, CA, USA, 17–21 February 2019. [Google Scholar]
- Hasch, J.; Towards, R.B.D. 2020: Automotive Radar Technology Trends. In Proceedings of the 2015 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility, Heidelberg, Germany, 27–29 April 2015. [Google Scholar]
- Zofka, M.R.; Kohlhaas, R.K.; Rist, C.; Schamm, T.; Zollner, J.M. Data-driven simulation and parameterization of traffic scenarios for the development of advanced driver assistance systems. In Proceedings of the 2015 18th International Conference on Information Fusion (Fusion), Washington, DC, USA, 6–9 July 2015. [Google Scholar]
- Wiesbeck, W.; Sit, L.; Younis, M.; Rommel, T.; Krieger, G.; Radar, A.M. 2020: The future of radar systems. In Proceedings of the 2014 International Radar Conference—IGARSS, Lille, France, 13–17 October 2014; pp. 188–191. [Google Scholar]
- Jeong, I.-J.; Kim, K.-J. An interactive desirability function method to multiresponse optimization. Eur. J. Oper. Res. 2009, 195, 412–426. [Google Scholar] [CrossRef]
- Harrington, E.C., Jr. The desirability function. Ind. Qual. Control. 1965, 21, 494–498. [Google Scholar]
- Fuller, D.; Scherer, W. The desirability function: Underlying assumptions and application implications. In Proceedings of the IEEE International Conference, Systems, Man, and Cybernetics, San Diego, CA, USA, 11–14 October 1998. [Google Scholar]
- Trautmann, H. On the distribution of the desirability index using Harrington’s desirability function. Metrika 2006, 63, 207–213. [Google Scholar] [CrossRef]
- Driessen, P.F. Ray tracing interpretation of multiple-input multiple-output wireless systems. IFAC Proc. 2003, 36, 109–114. [Google Scholar] [CrossRef]
- Zhang, M.; Tu, C.; Zhu, W.; Wu, C.; Li, Q.; Wang, C.; Wang, H. BD-CVSA: A broadband direction finding method based on constructing virtual sparse arrays. Signal Process 2023, 212, 109160. [Google Scholar] [CrossRef]
- Yang, S.; Lyu, W.; Zhang, Z.; Yuen, C. Enhancing near-field sensing and communications with sparse arrays: Potentials, challenges, and emerging trends. arXiv 2023, arXiv:2309.08681. [Google Scholar]
- ISO 8855; Road Vehicles–Vehicle Dynamics and Road-Holding Ability–Vocabulary. International Standard: Geneva, Switzerland, 2011.
- SAE. Surface Vehicle Recommended Practice; Recommendation J670; SAE: Atlanta, GA, USA, 2008. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; Society of Automotive Engineers, Inc.: Warrendale, PA, USA, 1992. [Google Scholar]
- Hamblin, B.C.; Martini, R.D.; Cameron, J.T.; Brennan, S.N. Low-order modeling of vehicle roll dynamics. In Proceedings of the American Control Conference, Minneapolis, MI, USA, 14–16 June 2006. [Google Scholar]
- Gong, Q.; Zhong, S.; Ren, S.; Peng, Z.; Wang, G. A gridless method for direction finding with sparse arrays in nonuniform noise. Digital Signal Process. 2023, 134, 103898. [Google Scholar] [CrossRef]
- Perez-Eijo, L.; Arias, M.; Gonzalez-Valdes, B.; Rodriguez-Vaqueiro, Y.; Rubiños, O.; Pino, A.; Sardinero-Meirás, I.; Grajal, J. Designing advanced multistatic imaging systems with optimal 2D sparse arrays. Appl. Sci. 2023, 13, 12138. [Google Scholar] [CrossRef]
- Stutzman, W.L.; Thiele, G.A. Antenna Theory and Design, 3rd ed.; John Wiley & Sons. Inc.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Sharif, R.; Tanyer, S.G.; Harrison, S.; Junor, W.; Driessen, P.; Herring, R. Locating Earth Disturbances Using the SDR Earth Imager. Remote Sens. 2022, 14, 6393. [Google Scholar] [CrossRef]
- Sharif, R.; Tanyer, S.G.; Harrison, S.; Driessen, P.; Herring, R. Monitoring Earth using SDR Earth Imager. J. Atmos. Sol.-Terr. Phys. 2022, 235, 105907. [Google Scholar] [CrossRef]
- LWA: Long Wavelength Array. Available online: https://leo.phys.unm.edu/~lwa/index.html (accessed on 25 February 2024).
- Wang, H.; Zeng, Y. Can sparse arrays outperform collocated arrays for future wireless communications? arXiv 2023, arXiv:2307.07925. [Google Scholar]
- Tanyer, S.G.; Dent, P.; Ali, M.; Davis, C. Sparse Antenna Arrays for Automotive Radar. U.S. Patent 20220326347, 13 October 2022. [Google Scholar]
- Dent, P.W.; Tanyer, S.G.; Ali, M.; Rush, F.; Maher, M.; Eshraghi, A.; Bordes, J.P.; Goldenberg, M.; Caldeira, V.; Alland, S.W.; et al. Automotive Radar Device. U.S. Patent 20220308160, 29 September 2022. [Google Scholar]
- Tanyer, S.G. Random number generation with the method of uniform sampling: Very high goodness of fit and randomness. Eng. Lett. 2018, 26, 1–6. [Google Scholar]
- Candioti, L.V.; De Zan, M.M.; Cámara, M.S.; Goicoechea, H.C. Experimental design and multiple response optimization using the desirability function in analytical methods development. Talanta 2014, 124, 123–138. [Google Scholar] [CrossRef] [PubMed]
- Pasandideh, S.H.R.; Niaki, S.T.A. Multi-response simulation optimization using genetic algorithm within desirability function framework. Appl. Math. Comput. 2006, 175, 366–382. [Google Scholar] [CrossRef]
- Derringer, G.; Suich, R. Simultaneous optimization of several response variables. J. Qual. Technol. 1980, 12, 214–219. [Google Scholar] [CrossRef]
- Ozturk, B.A.; Weber, G.-W.; Koksal, G. Desirability Functions in Multiresponse Optimization. In Operations Research Proceedings; Springer: Berlin/Heidelberg, Germany, 2014; pp. 293–298. [Google Scholar]
- Graff, A.; Chen, L.; Ali, M.; Tang, J.; Tanyer, S.G.; Dent, P.W. Radar System with Enhanced Processing for Increased Contrast Ratio, Improved Angular Separability and Accuracy, and Elimination of Ghost Targets in a Single-Snapshot. U.S. Patent 20230176179, 8 June 2023. [Google Scholar]
- Sarangi, P.; Hucumenoglu, M.C.; Rajamaki, R.; Pal, P. Super-resolution with sparse arrays: A non-asymptotic analysis of spatio-temporal trade-offs. arXiv 2023, arXiv:2301.01734. [Google Scholar]
- Foutz, J.; Spanias, A.; Banavar, M.K. Narrowband Direction of Arrival Estimation for Antenna Arrays; Synthesis Lectures on Antennas #8; Morgan & Claypool Publishers: Williston, VT, USA, 2008. [Google Scholar]
- Cheng, D.K. Field and Wave Electromagnetics; Addison-Wesley Publ.: Sydney, Australia, 1983. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aperture Loss and Beamwidth Spreading Factors | |
| Beamforming vectors and matrices | |
| Reference phase at the origin | |
| Calibration matrices; standard and for the sparse array formulation | |
| Inter-element spacing, its value normalized to one wavelength and incremental spacing value | |
| , | The desirability functions for the LTB and STB cases |
| Antenna elements gain factors | |
| FOV, uFOV | Operational field of view (FOV) and the usable FOV |
| The direction of the t’th target in spherical coordinates | |
| Beamforming output | |
| Wavevector | |
| Number of transmitter, receiver, and virtual receiver elements | |
| Sparse array element order number and the total number of virtual elements | |
| Oversampling ratios for field domain | |
| Far-field received pattern | |
| Steering vectors | |
| Displacement vectors for the field point, TX and RX | |
| Radar cross-section for the t’th target | |
| Thinning/sparsity ratio | |
| T | Number of targets |
| Directional cosine terms, for the field domain | |
| Expected observation range for the variable | |
| The field point based on the ISO/SAE coordinate system. | |
| Source coordinates where the aperture is located on the surface. | |
| The transmitter and receiver coordinates on the aperture | |
| Antenna aperture dimensions along y- and z-axis. |
| Spacings (λ) | 0.5 | 0.5077 | 0.5321 | 0.5774 | 0.6527 | 0.7778 | 1 | 2 | 3 | 4 | 5 | 10 | 20 |
| uFOV (deg) | 180 | 160 | 140 | 120 | 100 | 80 | 60 | 28.96 | 19.19 | 14.36 | 11.48 | 5.73 | 2.87 |
| (a, b) Shared Fully Populated Aperture | (c, d) Vertical | (e, f) Diagonal | (g, h) Four Corners | (i, j) L Shaped Receivers | (k, l) Wrap-Around | (m, n) Improved Four Corners | ||
| αap | (0, 0) | 1 | 0.504 | 0.735 | 0.735 | 0.629 | 0.254 | 1 |
| (5, 5) | 1 | 0.438 | 0.613 | 0.681 | 0.535 | 0.235 | 0.670 | |
| (15, 10) | 1 | 0.3398 | 0.4897 | 0.446 | 0.380 | 0.136 | 0.490 | |
| (20, 15) | 1 | 0.1746 | 0.244 | 0.142 | 0.199 | – | 0.238 | |
| αbw,ϕ | (0, 0) | 1 | 1 | 1.013 | 1 | 1 | 2 | 1 |
| (5, 5) | 1 | 1 | 1.013 | 1 | 1.067 | 2 | 1 | |
| (15, 10) | 1 | 1 | 1.013 | 1 | 1.231 | 2 | 1 | |
| (20, 15) | 1 | 1 | 1.013 | 1 | 1.455 | – | 1 | |
| αbw,θ | (0, 0) | 1 | 2 | 1.008 | 1 | 1.333 | 2 | 1 |
| (5, 5) | 1 | 2.308 | 1.212 | 1 | 1.395 | 2 | 1 | |
| (15, 10) | 1 | 3 | 1.519 | 1 | 1.500 | 2 | 1 | |
| (20, 15) | 1 | 6 | 3.078 | 1 | 1.714 | – | 1 |
| RX-1 | RX-2 | RX-3 | RX-4 | RX-5 | RX-6 | RX-7 | RX-8 | RX-9 | RX-10 | RX-11 | RX-12 | RX-13 | RX-14 | RX-15 | RX-16 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TX-1 | −86.0 | −77.5 | −59.7 | −55.6 | −81.1 | −80.6 | −85.7 | −72.5 | −94.7 | −91.4 | −99.7 | −101.4 | −101.5 | −109.3 | −116.2 | −110.9 |
| TX-2 | −41.5 | −51.0 | −50.1 | −56.5 | −67.7 | −71.1 | −60.7 | −91.4 | −63.8 | −92.1 | −70.8 | −71.5 | −97.7 | −81.4 | −91.4 | −81.0 |
| TX-3 | −39.7 | −41.1 | −52.2 | −79.1 | −89.1 | −75.5 | −60.6 | −77.9 | −64.8 | −91.6 | −72.0 | −69.0 | −81.7 | −77.0 | −84.5 | −78.8 |
| TX-4 | −58.3 | −68.0 | −57.2 | −42.3 | −57.2 | −54.0 | −84.9 | −66.9 | −104.2 | −59.9 | −85.2 | −61.8 | −67.0 | −69.0 | −72.4 | −71.9 |
| TX-5 | −60.4 | −78.3 | −63.2 | −67.3 | −36.9 | −63.3 | −42.8 | −43.0 | −53.8 | −66.3 | −59.3 | −52.5 | −84.8 | −65.6 | −93.3 | −64.7 |
| TX-6 | −78.9 | −90.7 | −77.2 | −53.2 | −40.5 | −70.3 | −35.3 | −50.0 | −34.8 | −66.9 | −46.2 | −70.5 | −53.3 | −73.0 | −80.9 | −81.7 |
| TX-7 | −70.2 | −81.2 | −87.2 | −82.8 | −63.3 | −78.0 | −53.1 | −54.9 | −42.3 | −55.2 | −36.4 | −36.7 | −42.0 | −47.3 | −68.4 | −50.0 |
| TX-8 | −88.7 | −77.1 | −85.3 | −86.1 | −54.3 | −74.7 | −47.9 | −52.6 | −54.7 | −56.3 | −49.5 | −40.0 | −41.0 | −66.8 | −70.7 | −71.7 |
| TX-9 | −94.8 | −97.0 | −73.7 | −66.4 | −64.2 | −51.0 | −67.3 | −46.0 | −66.7 | −40.2 | −58.9 | −50.9 | −49.9 | −76.8 | −76.4 | −91.2 |
| TX-10 | −101.1 | −101.6 | −80.0 | −72.7 | −70.3 | −71.8 | −71.8 | −54.9 | −76.0 | −54.1 | −66.1 | −59.6 | −55.3 | −80.0 | −81.2 | −88.1 |
| TX-11 | −101.9 | −99.9 | −101.9 | −92.4 | −71.0 | −62.0 | −71.6 | −84.7 | −56.8 | −57.6 | −57.7 | −52.9 | −43.4 | −51.5 | −43.5 | −48.5 |
| TX-12 | −94.0 | −85.3 | −105.7 | −80.0 | −80.8 | −75.1 | −72.1 | −55.2 | −85.8 | −83.9 | −52.0 | −60.0 | −47.7 | −42.5 | −31.5 | −39.7 |
| Ankara–1 | Ankara–2 | |||
|---|---|---|---|---|
| A | B | A | B | |
| PSLR (dB) | 11.23 | 8.64 | 11.10 | 9.14 |
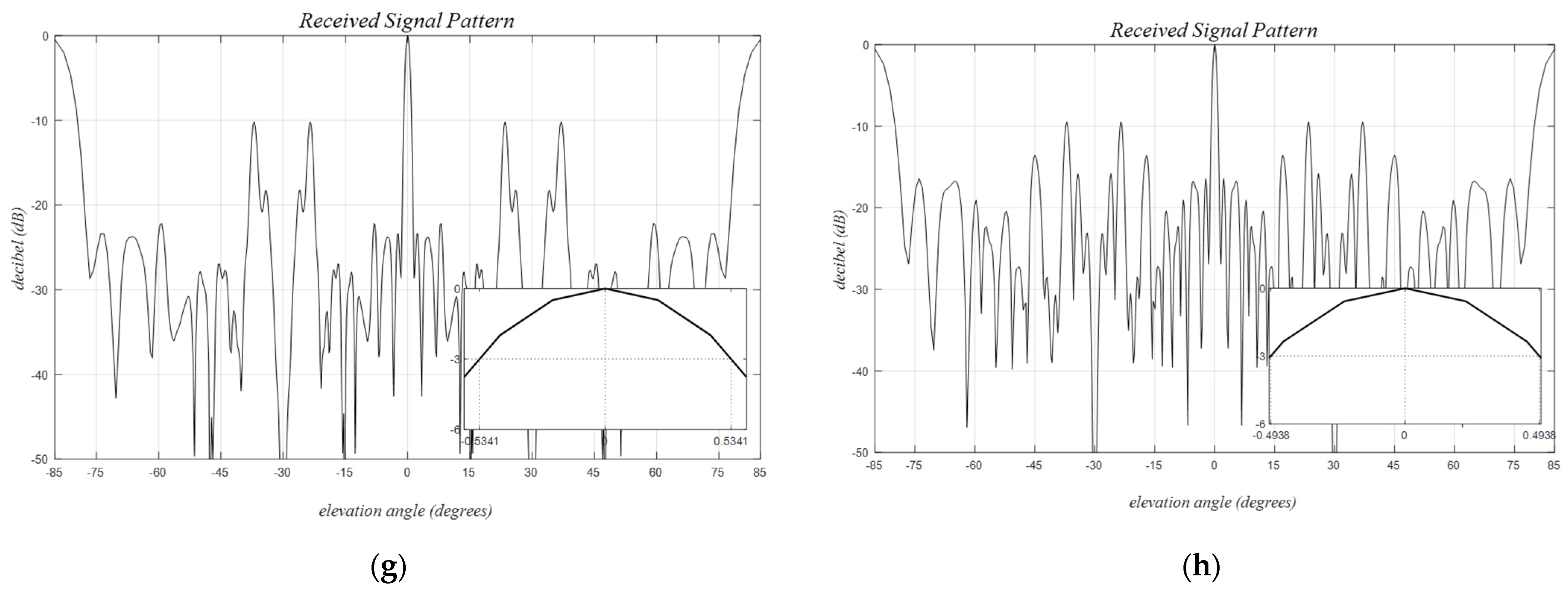
| BW-azimuth (deg) | 0.55 | 0.53 | 0.4 | 0.5 |
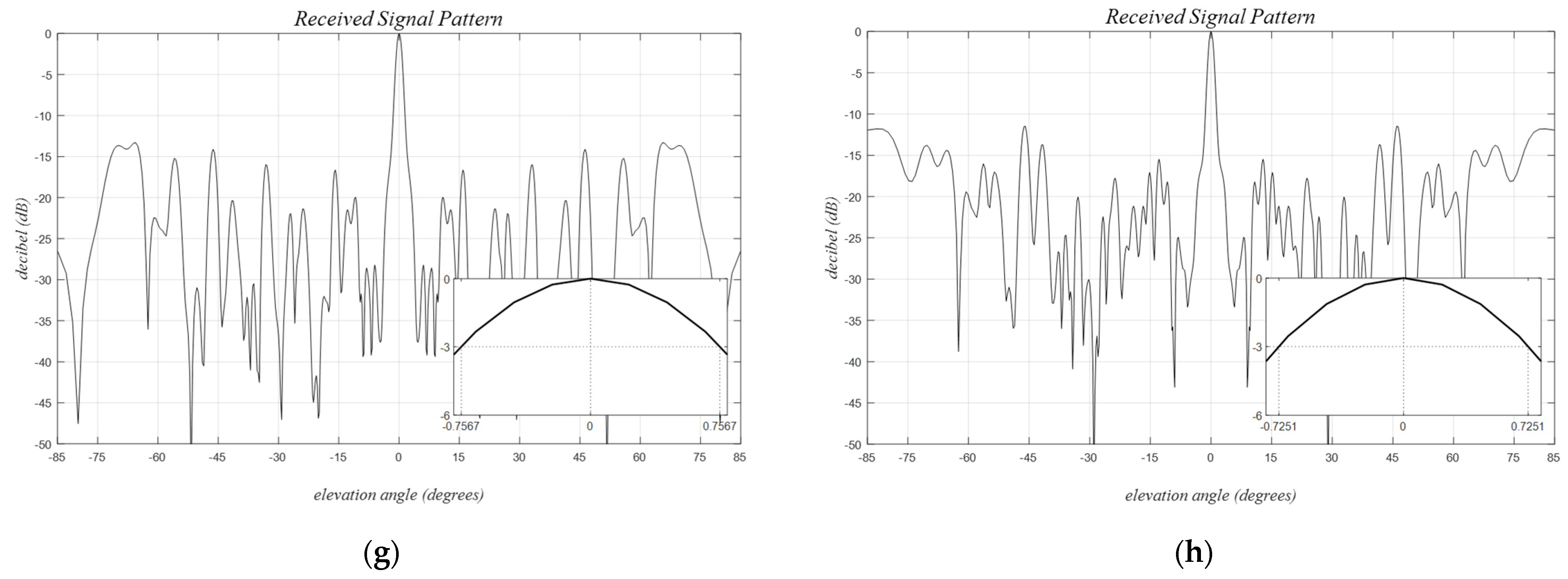
| BW-elevation (deg) | 0.49 | 0.5 | 0.76 | 0.73 |
| # of elements (TX, RX) | 12, 16 | 12, 8 | 12, 16 | 12, 8 |
| # of VRX’s (generated, unique) | 192, 192 | 96, 96 | 192, 190 | 96, 96 |
| Thinning ratio (%) | 2.6 | 1.3 | 1.09 | 0.68 |
| uFOV (deg) | 180 | 60 | 180 | 180 |
| Reference URA size | 121 × 61 | 156 × 112 | 130 × 109 | |
| # reference URA elements | 7381 | 17,472 | 14,170 | |
| Reference grid size (λ) | 0.5, 1.0 | 0.5, 0.5 | ||
| Physical aperture size (λ) | 32 × 35 | 41.5 × 34 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanyer, S.G.; Dent, P.; Ali, M.; Davis, C.; Rajagopal, S.; Driessen, P.F. Multi-Objective Design and Optimization of Hardware-Friendly Grid-Based Sparse MIMO Arrays. Sensors 2024, 24, 6810. https://doi.org/10.3390/s24216810
Tanyer SG, Dent P, Ali M, Davis C, Rajagopal S, Driessen PF. Multi-Objective Design and Optimization of Hardware-Friendly Grid-Based Sparse MIMO Arrays. Sensors. 2024; 24(21):6810. https://doi.org/10.3390/s24216810
Chicago/Turabian StyleTanyer, Suleyman Gokhun, Paul Dent, Murtaza Ali, Curtis Davis, Senthilkumar Rajagopal, and Peter F. Driessen. 2024. "Multi-Objective Design and Optimization of Hardware-Friendly Grid-Based Sparse MIMO Arrays" Sensors 24, no. 21: 6810. https://doi.org/10.3390/s24216810
APA StyleTanyer, S. G., Dent, P., Ali, M., Davis, C., Rajagopal, S., & Driessen, P. F. (2024). Multi-Objective Design and Optimization of Hardware-Friendly Grid-Based Sparse MIMO Arrays. Sensors, 24(21), 6810. https://doi.org/10.3390/s24216810