
Neural Radiance Fields for Fisheye Driving Scenes Using Edge-Aware Integrated Depth Supervision


Abstract
1. Introduction
- We present a method that utilizes a fisheye camera to synthesize novel views in real-world driving scenarios.
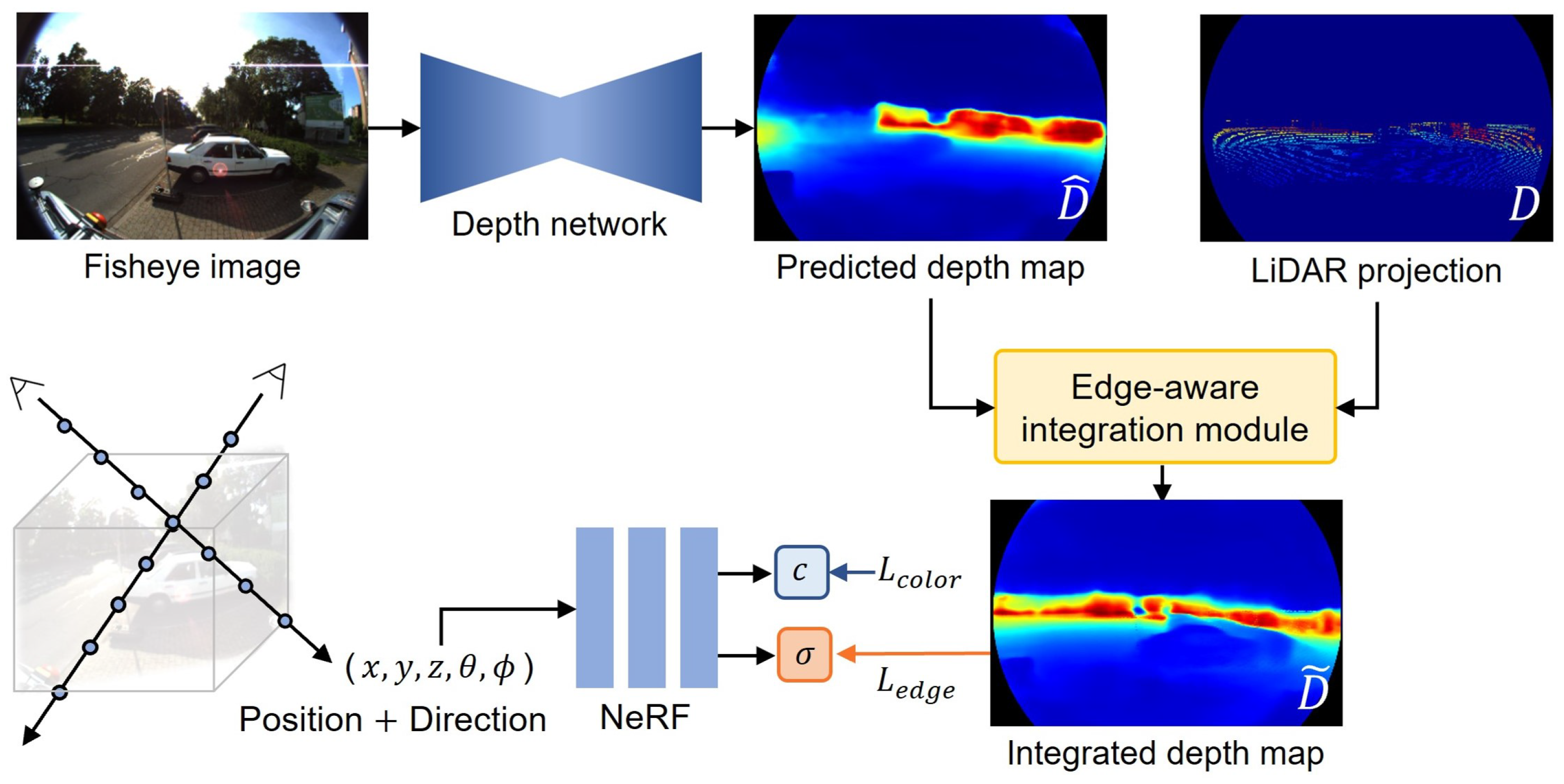
- We propose an edge-aware integration loss function that minimizes the difference between the rendered ray and the integrated depth distribution.
- We demonstrate that the proposed method outperforms other approaches, as shown by the results from the KITTI-360 [13] and JBNU-Depth360 datasets.
2. Related Work
2.1. Fisheye and Omni-Directional NeRF
2.2. NeRF with Depth Supervision
3. Method
3.1. Preliminaries
3.2. Depth Supervision
3.3. Edge-Aware Integration Loss
4. Experimental Results
4.1. Datasets
- KITTI-360.
- JBNU-Depth360.
- Evaluation metric.
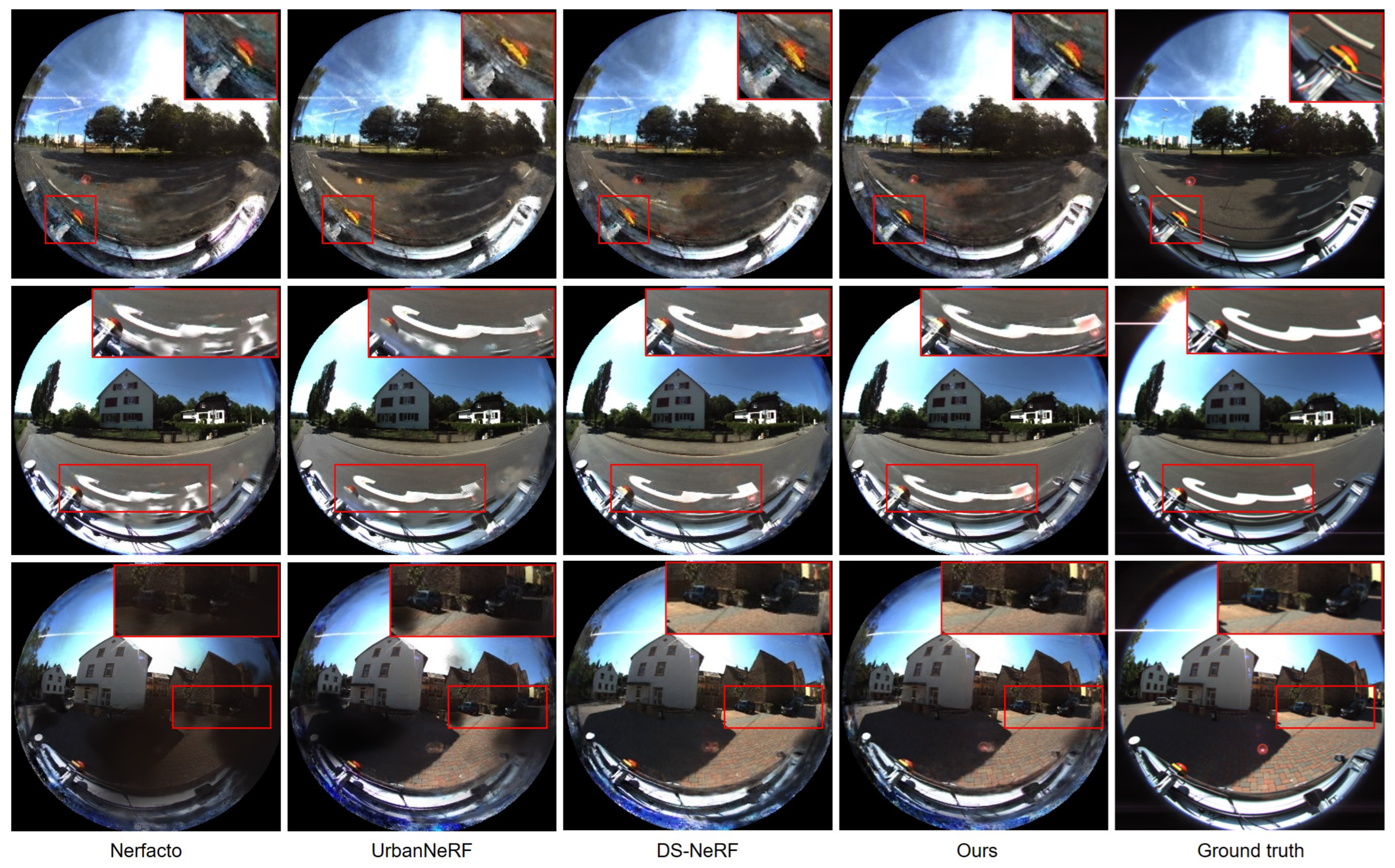
4.2. Results on the KITTI-360 Dataset
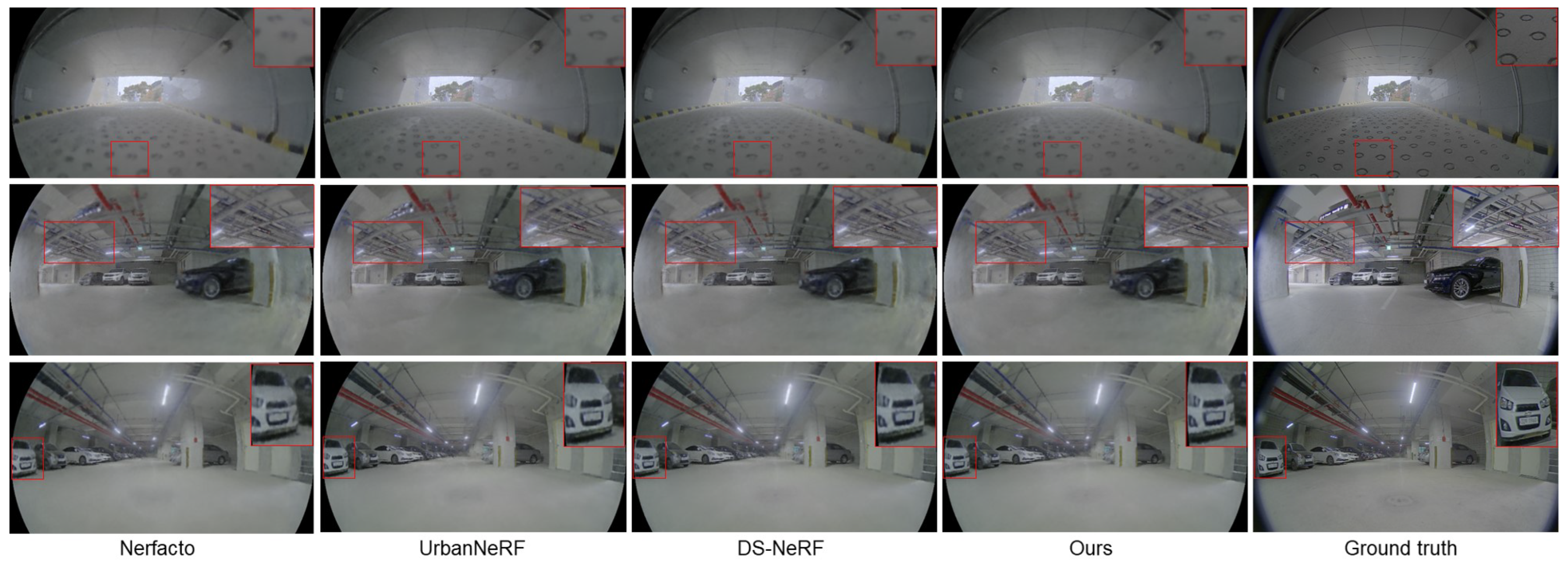
4.3. Results on the JBNU-Depth360 Dataset
4.4. Ablation Study
- Depth type comparison.
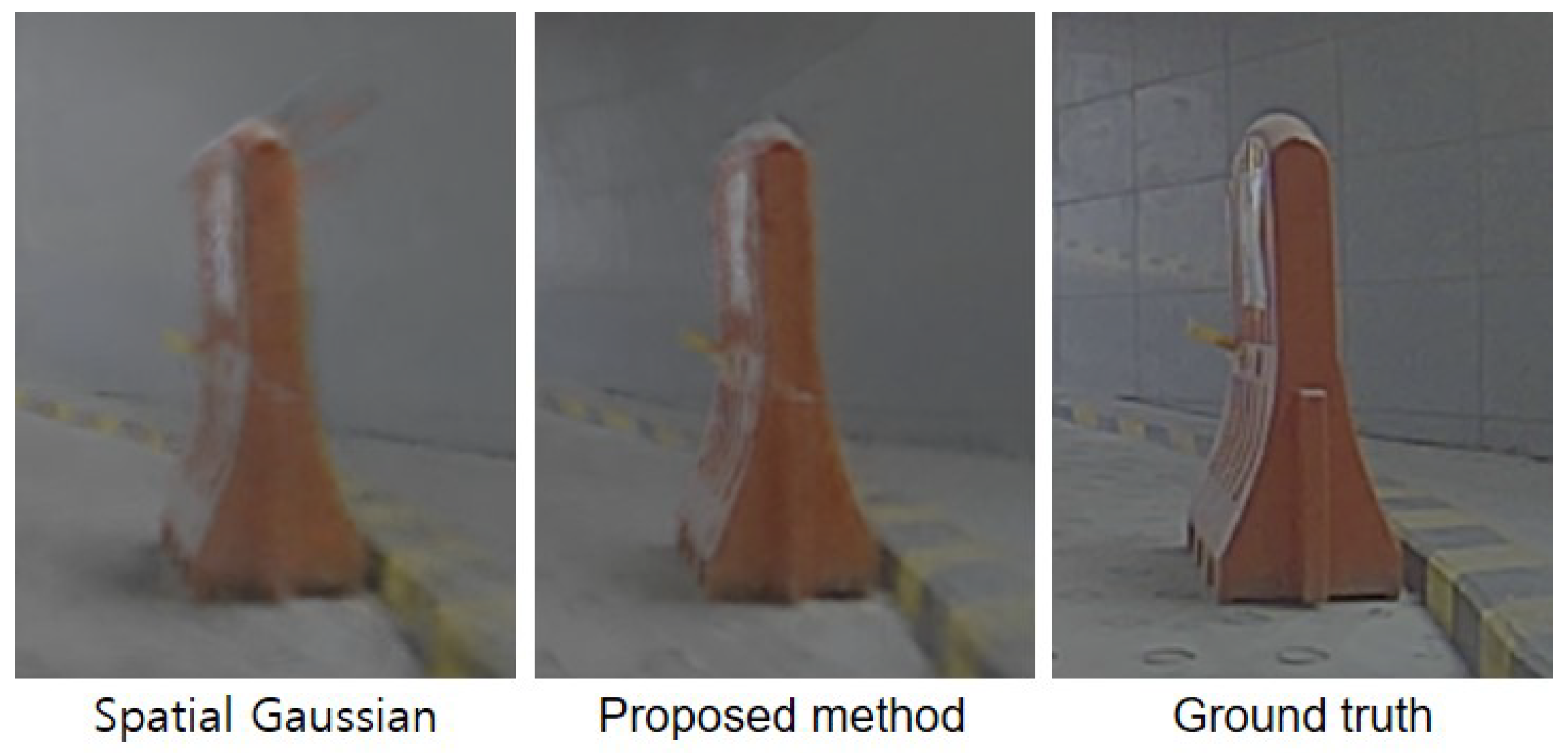
- Depth integration method comparison.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mildenhall, B.; Srinivasan, P.P.; Tancik, M.; Barron, J.T.; Ramamoorthi, R.; Ng, R. Nerf: Representing scenes as neural radiance fields for view synthesis. Commun. ACM 2021, 65, 99–106. [Google Scholar] [CrossRef]
- Martin-Brualla, R.; Radwan, N.; Sajjadi, M.S.; Barron, J.T.; Dosovitskiy, A.; Duckworth, D. Nerf in the wild: Neural radiance fields for unconstrained photo collections. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 7210–7219. [Google Scholar]
- Liu, S.; Zhang, X.; Zhang, Z.; Zhang, R.; Zhu, J.Y.; Russell, B. Editing conditional radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5773–5783. [Google Scholar]
- Bao, C.; Zhang, Y.; Yang, B.; Fan, T.; Yang, Z.; Bao, H.; Zhang, G.; Cui, Z. Sine: Semantic-driven image-based nerf editing with prior-guided editing field. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 20919–20929. [Google Scholar]
- Lin, C.H.; Ma, W.C.; Torralba, A.; Lucey, S. Barf: Bundle-adjusting neural radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5741–5751. [Google Scholar]
- Jeong, Y.; Ahn, S.; Choy, C.; Anandkumar, A.; Cho, M.; Park, J. Self-calibrating neural radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5846–5854. [Google Scholar]
- Zeng, Y.; Lei, J.; Feng, T.; Qin, X.; Li, B.; Wang, Y.; Wang, D.; Song, J. Neural Radiance Fields-Based 3D Reconstruction of Power Transmission Lines Using Progressive Motion Sequence Images. Sensors 2023, 23, 9537. [Google Scholar] [CrossRef] [PubMed]
- Ge, H.; Wang, B.; Zhu, Z.; Zhu, J.; Zhou, N. Hash Encoding and Brightness Correction in 3D Industrial and Environmental Reconstruction of Tidal Flat Neural Radiation. Sensors 2024, 24, 1451. [Google Scholar] [CrossRef]
- Rematas, K.; Liu, A.; Srinivasan, P.P.; Barron, J.T.; Tagliasacchi, A.; Funkhouser, T.; Ferrari, V. Urban radiance fields. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 12932–12942. [Google Scholar]
- Xie, Z.; Zhang, J.; Li, W.; Zhang, F.; Zhang, L. S-nerf: Neural radiance fields for street views. arXiv 2023, arXiv:2303.00749. [Google Scholar]
- Deng, L.; Yang, M.; Qian, Y.; Wang, C.; Wang, B. CNN based semantic segmentation for urban traffic scenes using fisheye camera. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 231–236. [Google Scholar]
- Son, E.; Choi, J.; Song, J.; Jin, Y.; Lee, S.J. Monocular Depth Estimation from a Fisheye Camera Based on Knowledge Distillation. Sensors 2023, 23, 9866. [Google Scholar] [CrossRef] [PubMed]
- Liao, Y.; Xie, J.; Geiger, A. KITTI-360: A Novel Dataset and Benchmarks for Urban Scene Understanding in 2D and 3D. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 3292–3310. [Google Scholar] [CrossRef] [PubMed]
- Barron, J.T.; Mildenhall, B.; Tancik, M.; Hedman, P.; Martin-Brualla, R.; Srinivasan, P.P. Mip-nerf: A multiscale representation for anti-aliasing neural radiance fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5855–5864. [Google Scholar]
- Tang, X.; Yang, M.; Sun, P.; Li, H.; Dai, Y.; Zhu, F.; Lee, H. PaReNeRF: Toward Fast Large-scale Dynamic NeRF with Patch-based Reference. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–22 June 2024; pp. 5428–5438. [Google Scholar]
- Li, H.; Zhang, D.; Dai, Y.; Liu, N.; Cheng, L.; Li, J.; Wang, J.; Han, J. GP-NeRF: Generalized Perception NeRF for Context-Aware 3D Scene Understanding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–22 June 2024; pp. 21708–21718. [Google Scholar]
- Gu, K.; Maugey, T.; Knorr, S.; Guillemot, C. Omni-nerf: Neural radiance field from 360 image captures. In Proceedings of the 2022 IEEE International Conference on Multimedia and Expo (ICME), Taipei, Taiwan, 18–22 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Kulkarni, S.; Yin, P.; Scherer, S. 360fusionnerf: Panoramic neural radiance fields with joint guidance. arXiv 2022, arXiv:2209.14265. [Google Scholar]
- Choi, J.; Hwang, G.; Lee, S.J. DiCo-NeRF: Difference of Cosine Similarity for Neural Rendering of Fisheye Driving Scenes. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–22 June 2024; pp. 7850–7858. [Google Scholar]
- Wei, Y.; Liu, S.; Rao, Y.; Zhao, W.; Lu, J.; Zhou, J. Nerfingmvs: Guided optimization of neural radiance fields for indoor multi-view stereo. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 5610–5619. [Google Scholar]
- Deng, K.; Liu, A.; Zhu, J.Y.; Ramanan, D. Depth-Supervised NeRF: Fewer Views and Faster Training for Free. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 12882–12891. [Google Scholar]
- Schonberger, J.L.; Frahm, J.M. Structure-from-motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 11621–11631. [Google Scholar]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2446–2454. [Google Scholar]
- Wang, G.; Chen, Z.; Loy, C.C.; Liu, Z. Sparsenerf: Distilling depth ranking for few-shot novel view synthesis. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 9065–9076. [Google Scholar]
- Wang, C.; Sun, J.; Liu, L.; Wu, C.; Shen, Z.; Wu, D.; Dai, Y.; Zhang, L. Digging into depth priors for outdoor neural radiance fields. In Proceedings of the 31st ACM International Conference on Multimedia, Ottawa, ON, Canada, 29 October–3 November 2023; pp. 1221–1230. [Google Scholar]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from rgbd images. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part V 12. Springer: Berlin/Heidelberg, Germany, 2012; pp. 746–760. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? the kitti vision benchmark suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3354–3361. [Google Scholar]
- Lee, J.H.; Han, M.K.; Ko, D.W.; Suh, I.H. From big to small: Multi-scale local planar guidance for monocular depth estimation. arXiv 2019, arXiv:1907.10326. [Google Scholar]
- Tancik, M.; Weber, E.; Ng, E.; Li, R.; Yi, B.; Kerr, J.; Wang, T.; Kristoffersen, A.; Austin, J.; Salahi, K.; et al. Nerfstudio: A modular framework for neural radiance field development. arXiv 2023, arXiv:2302.04264. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | PSNR↑ | SSIM↑ | LPIPS↓ | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Drive_0002 | Drive_0007 | Drive_0009 | Average | Drive_0002 | Drive_0007 | Drive_0009 | Average | Drive_0002 | Drive_0007 | Drive_0009 | Average | |
| Nerfacto [30] | 13.466 | 13.699 | 13.650 | 13.024 | 0.580 | 0.583 | 0.627 | 0.537 | 0.532 | 0.607 | 0.439 | 0.583 |
| UrbanNeRF [9] | 13.645 | 13.765 | 13.997 | 13.099 | 0.579 | 0.580 | 0.629 | 0.539 | 0.551 | 0.603 | 0.436 | 0.590 |
| DS-NeRF [21] | 13.673 | 14.262 | 14.023 | 13.240 | 0.580 | 0.577 | 0.631 | 0.538 | 0.532 | 0.603 | 0.439 | 0.584 |
| Ours | 14.180 | 14.920 | 14.102 | 13.678 | 0.577 | 0.594 | 0.641 | 0.548 | 0.521 | 0.594 | 0.641 | 0.557 |
| Method | PSNR↑ | SSIM↑ | LPIPS↓ | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Drive_2 | Drive_3 | Drive_4 | Drive_5 | Average | Drive_2 | Drive_3 | Drive_4 | Drive_5 | Average | Drive_2 | Drive_3 | Drive_4 | Drive_5 | Average | |
| Nerfacto [30] | 20.102 | 19.811 | 20.155 | 19.002 | 20.388 | 0.763 | 0.737 | 0.754 | 0.749 | 0.763 | 0.561 | 0.544 | 0.524 | 0.565 | 0.542 |
| UrbanNeRF [9] | 20.130 | 19.822 | 20.164 | 19.170 | 20.452 | 0.764 | 0.737 | 0.754 | 0.750 | 0.763 | 0.563 | 0.539 | 0.521 | 0.561 | 0.540 |
| DS-NeRF [21] | 20.157 | 19.819 | 20.341 | 19.071 | 20.468 | 0.763 | 0.738 | 0.754 | 0.750 | 0.763 | 0.564 | 0.540 | 0.521 | 0.568 | 0.541 |
| Ours | 20.177 | 20.028 | 20.356 | 19.214 | 20.511 | 0.763 | 0.739 | 0.755 | 0.755 | 0.764 | 0.553 | 0.526 | 0.509 | 0.556 | 0.529 |
| Depth Type | PSNR↑ | SSIM↑ | LPIPS↓ | |
|---|---|---|---|---|
| KITTI-360 | LiDAR projection | 13.240 | 0.538 | 0.584 |
| Estimated depth | 13.555 | 0.539 | 0.578 | |
| Integrated depth | 13.678 | 0.548 | 0.557 | |
| JBNU-Depth360 | LiDAR projection | 20.468 | 0.763 | 0.541 |
| Estimated depth | 20.401 | 0.761 | 0.542 | |
| Integrated depth | 20.511 | 0.764 | 0.529 |
| Method | PSNR↑ | SSIM↑ | LPIPS↓ | |
|---|---|---|---|---|
| KITTI-360 | Spatial Gaussian | 13.502 | 0.533 | 0.592 |
| Proposed method | 13.678 | 0.548 | 0.557 | |
| JBNU-Depth360 | Spatial Gaussian | 19.899 | 0.753 | 0.549 |
| Proposed method | 20.511 | 0.764 | 0.529 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.; Lee, S.J. Neural Radiance Fields for Fisheye Driving Scenes Using Edge-Aware Integrated Depth Supervision. Sensors 2024, 24, 6790. https://doi.org/10.3390/s24216790
Choi J, Lee SJ. Neural Radiance Fields for Fisheye Driving Scenes Using Edge-Aware Integrated Depth Supervision. Sensors. 2024; 24(21):6790. https://doi.org/10.3390/s24216790
Chicago/Turabian StyleChoi, Jiho, and Sang Jun Lee. 2024. "Neural Radiance Fields for Fisheye Driving Scenes Using Edge-Aware Integrated Depth Supervision" Sensors 24, no. 21: 6790. https://doi.org/10.3390/s24216790
APA StyleChoi, J., & Lee, S. J. (2024). Neural Radiance Fields for Fisheye Driving Scenes Using Edge-Aware Integrated Depth Supervision. Sensors, 24(21), 6790. https://doi.org/10.3390/s24216790