

Application of IMU/GPS Integrated Navigation System Based on Adaptive Unscented Kalman Filter Algorithm in 3D Positioning of Forest Rescue Personnel


Abstract
1. Introduction
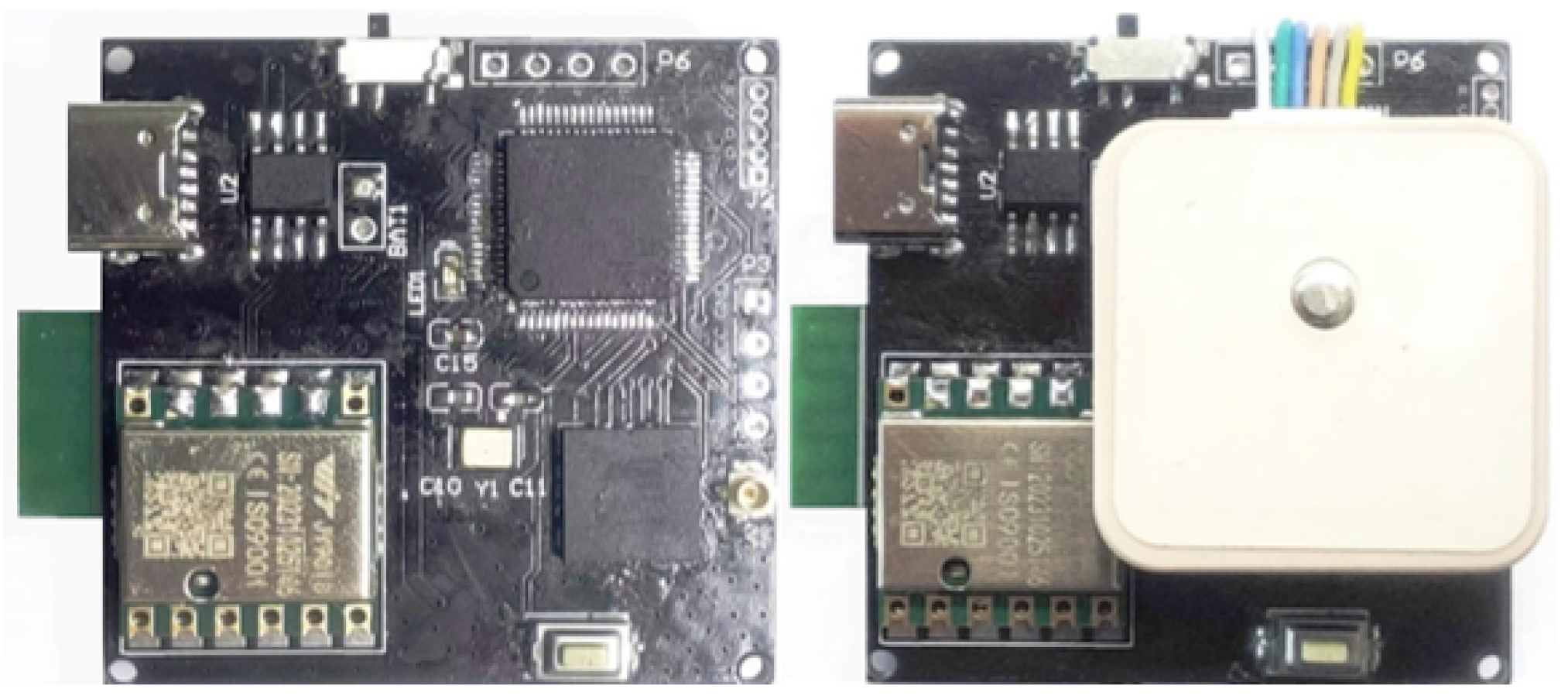
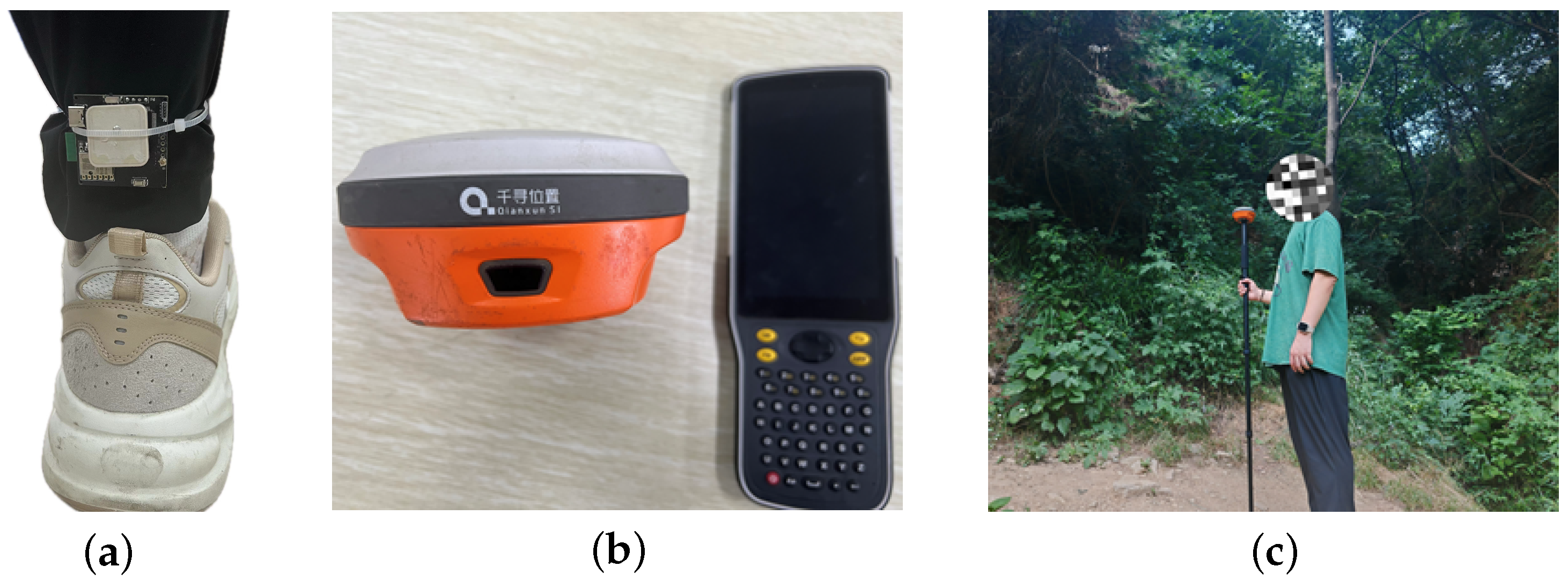
2. The Design of the Wearable Device
3. AUKF Algorithm for Integrated Navigation
3.1. The Traditional UKF Algorithm
3.2. AUKF Design
3.3. IMU/GPS Integrated Navigation System Model Design
3.3.1. System State Equation
3.3.2. System Measurement Equation
4. Experimental Results
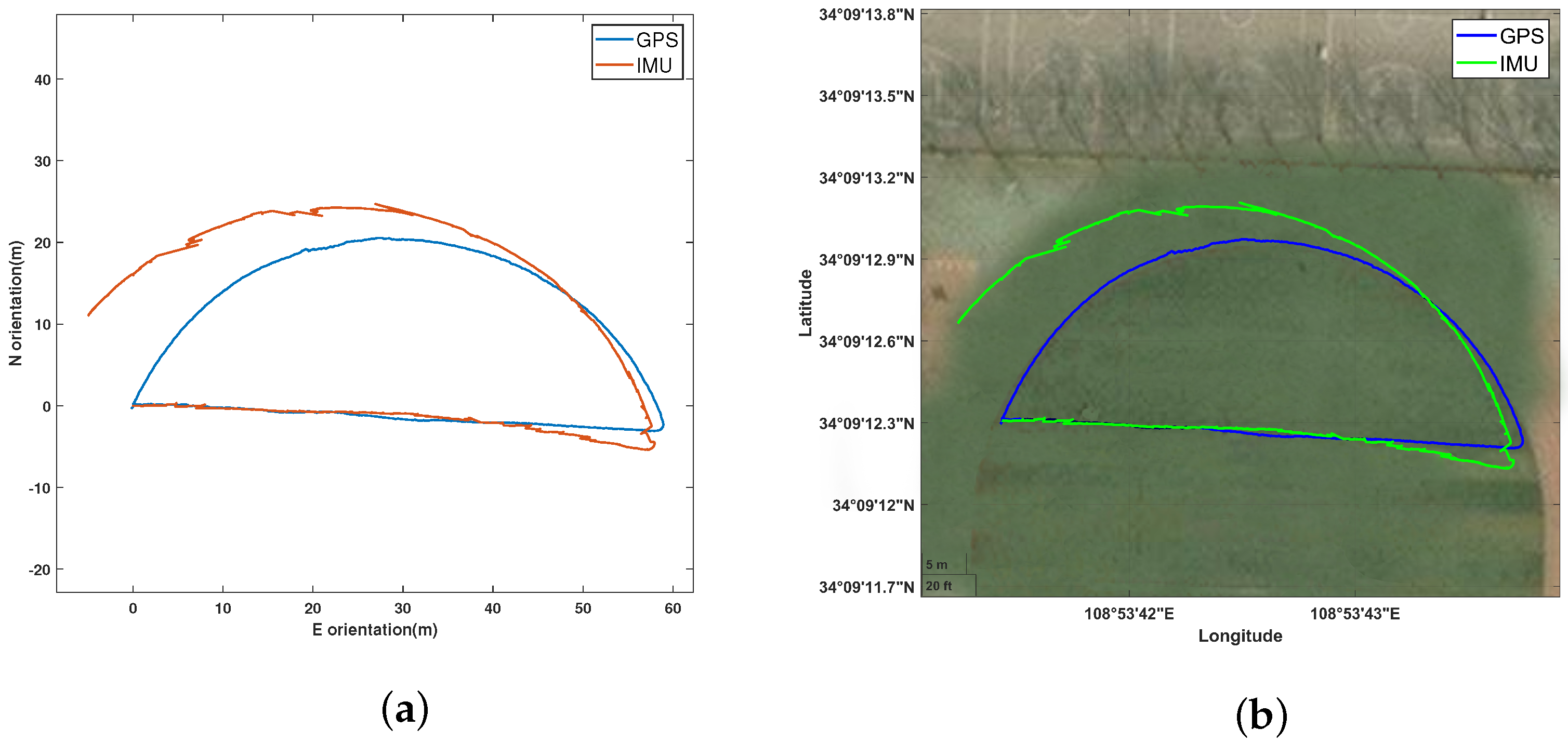
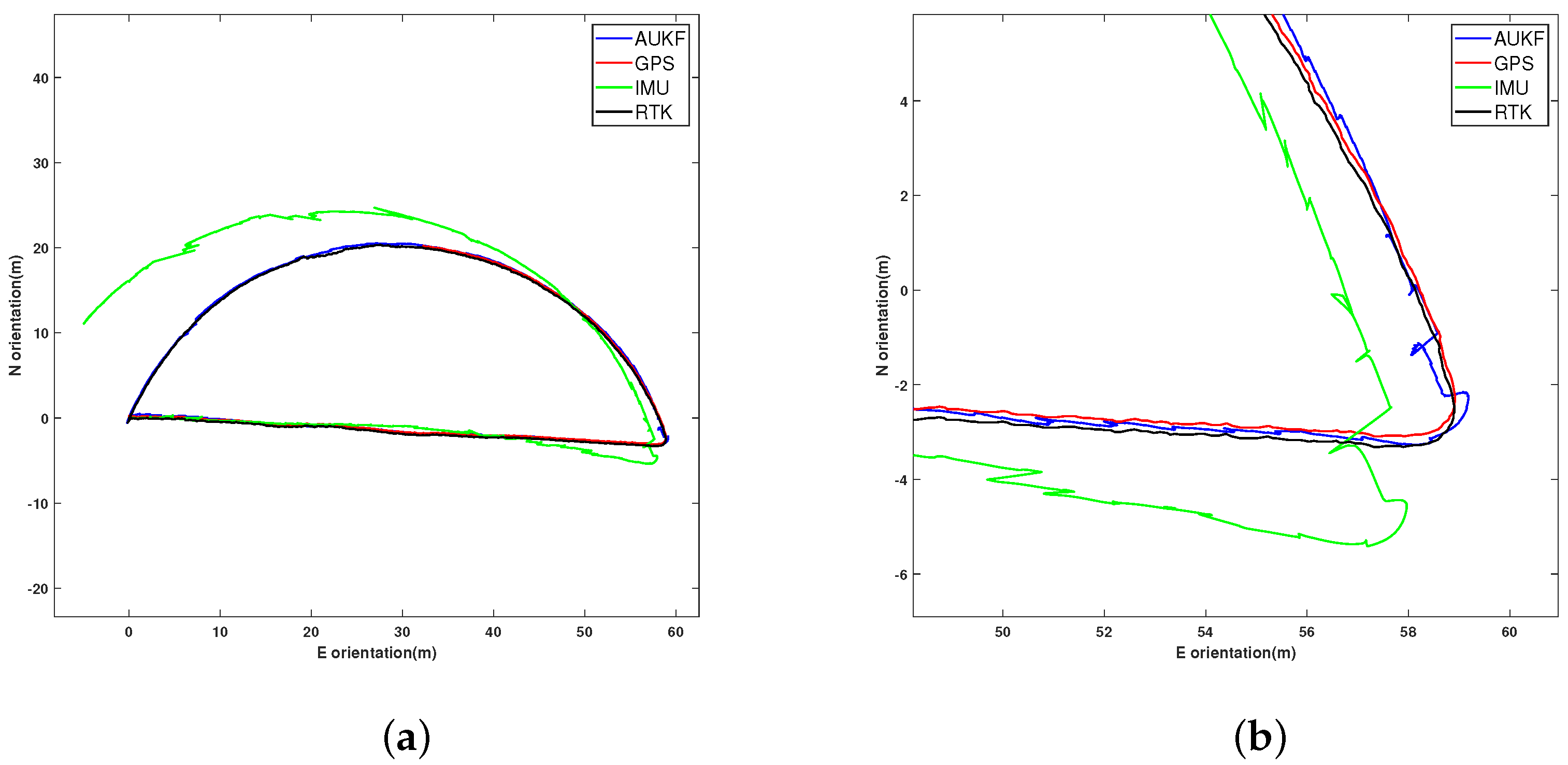
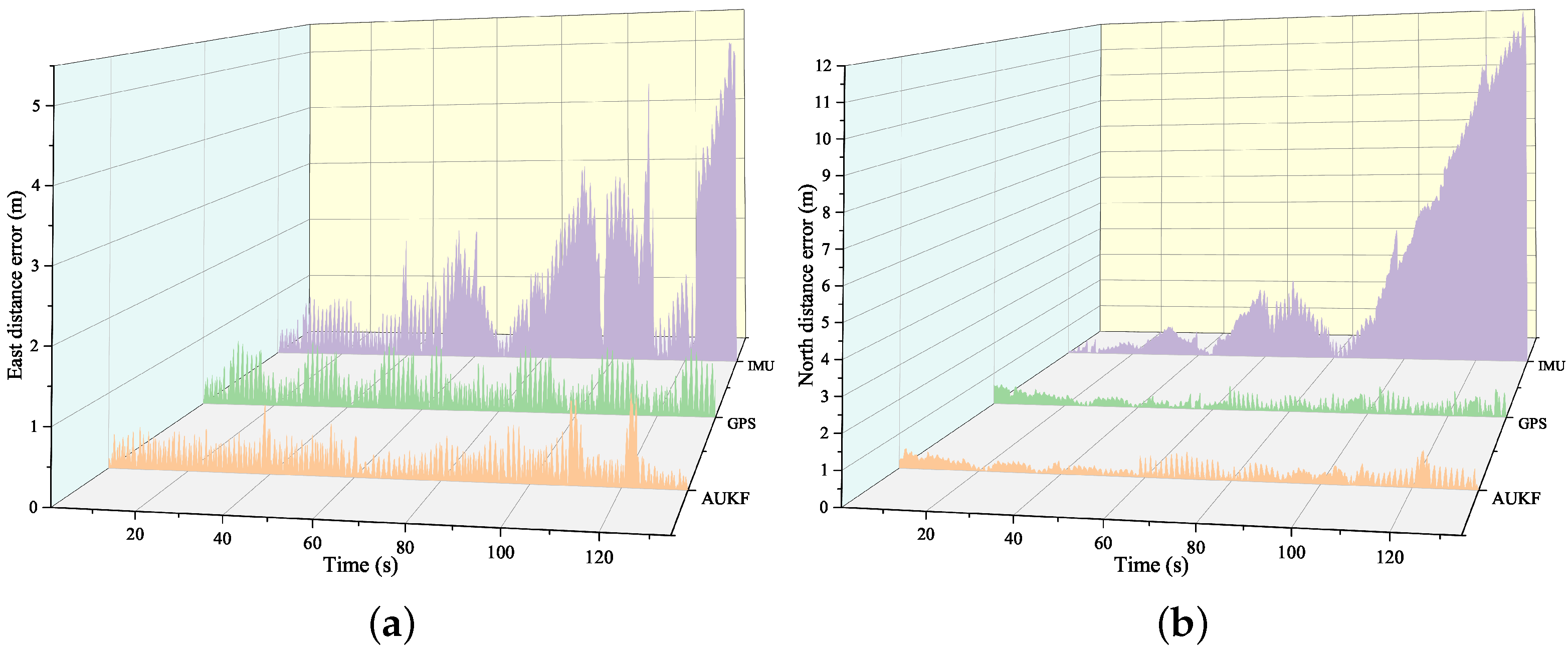
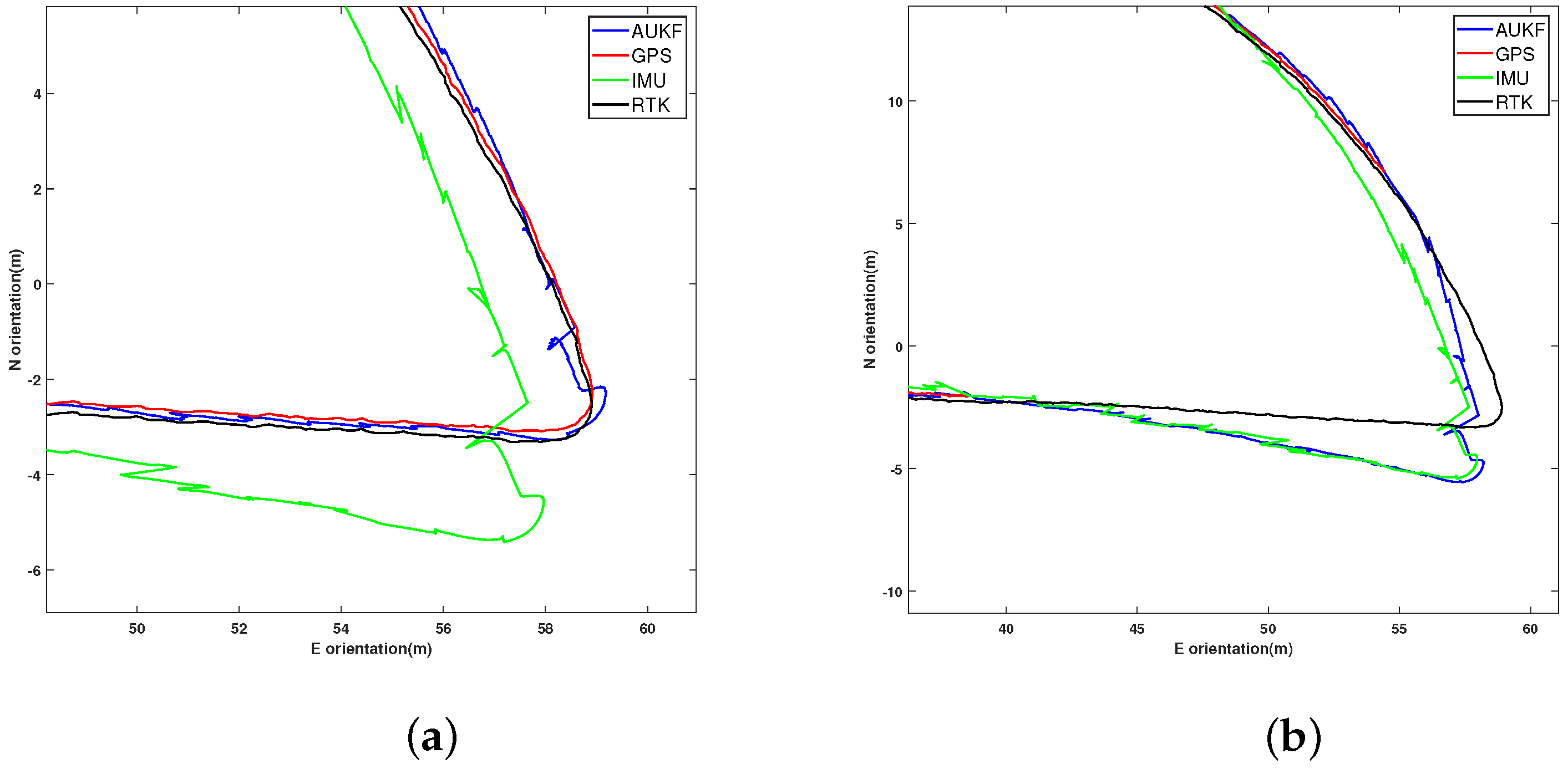
4.1. Two-Dimensional Plane Positioning Verification
4.2. Three-Dimensional Spatial Positioning Verification
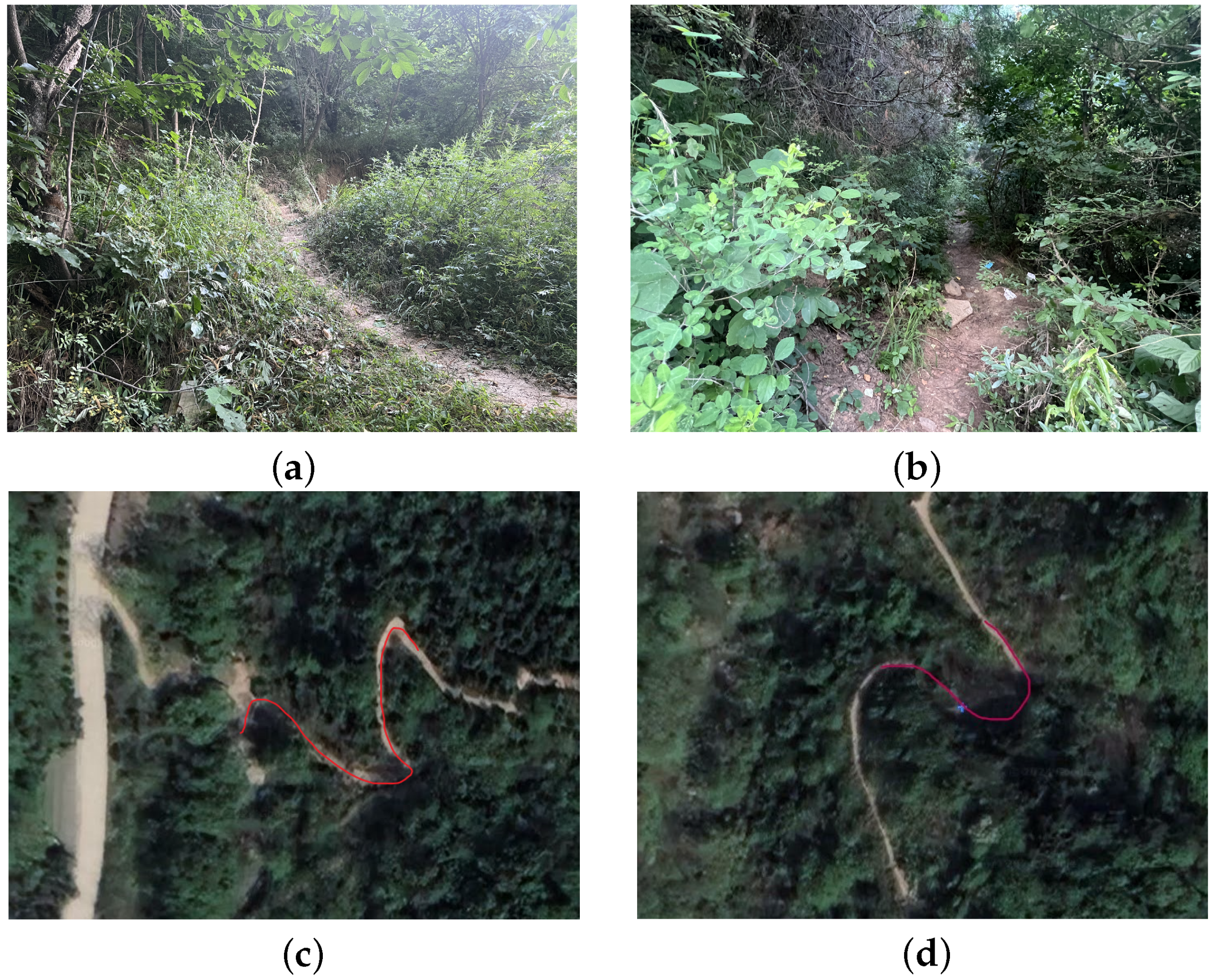
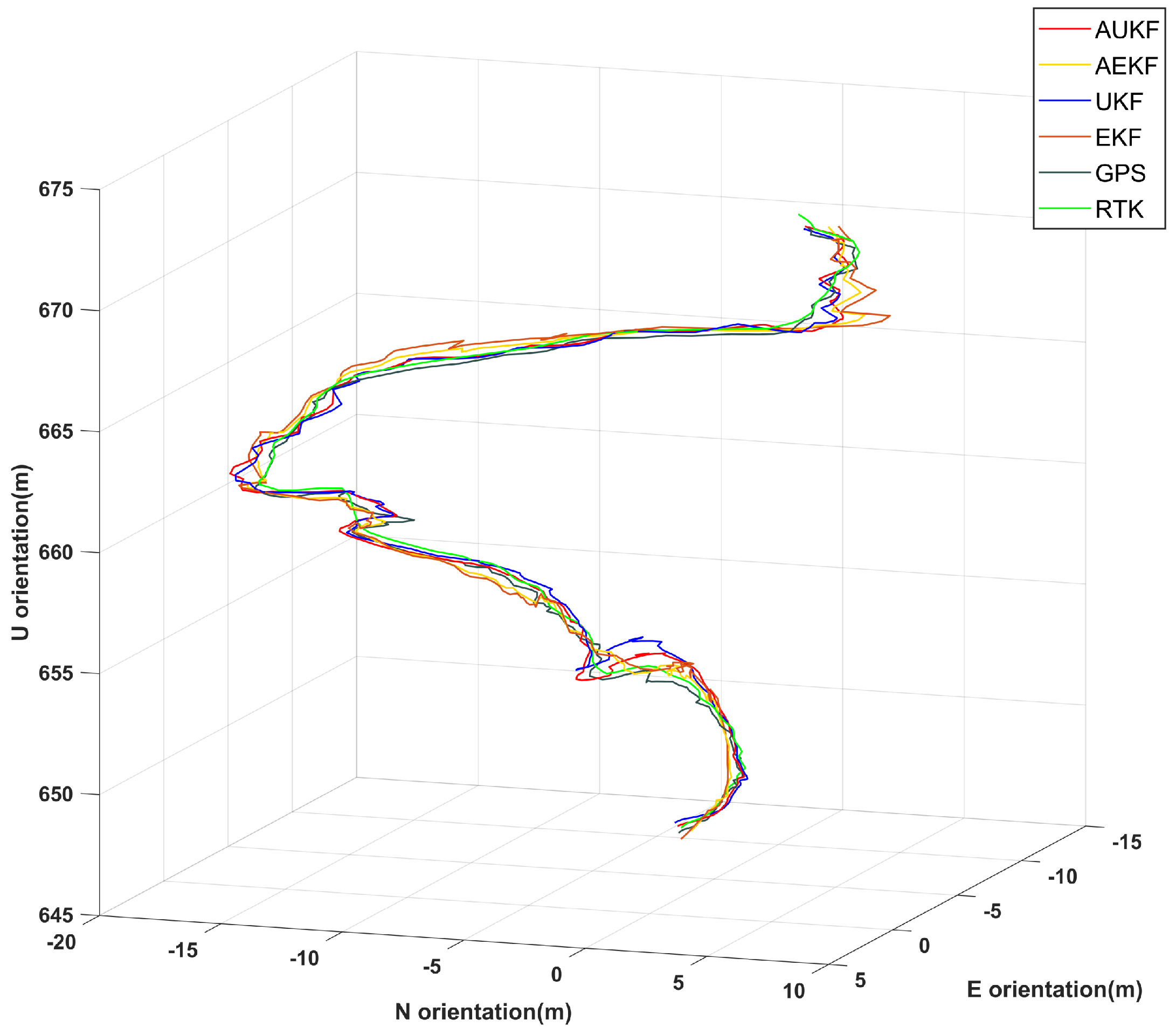
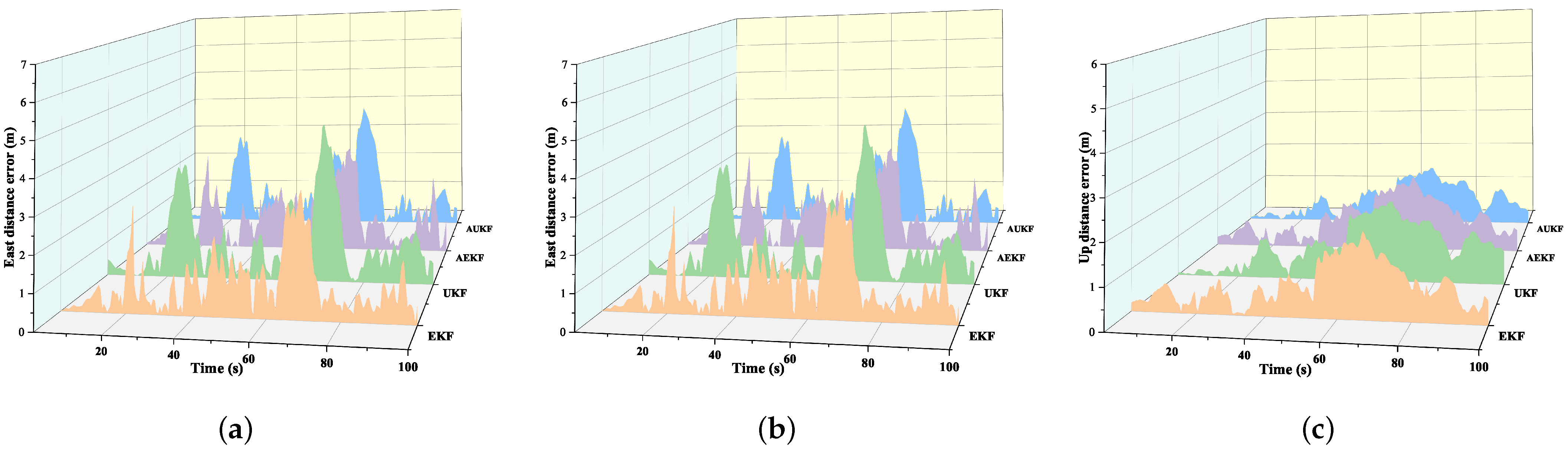
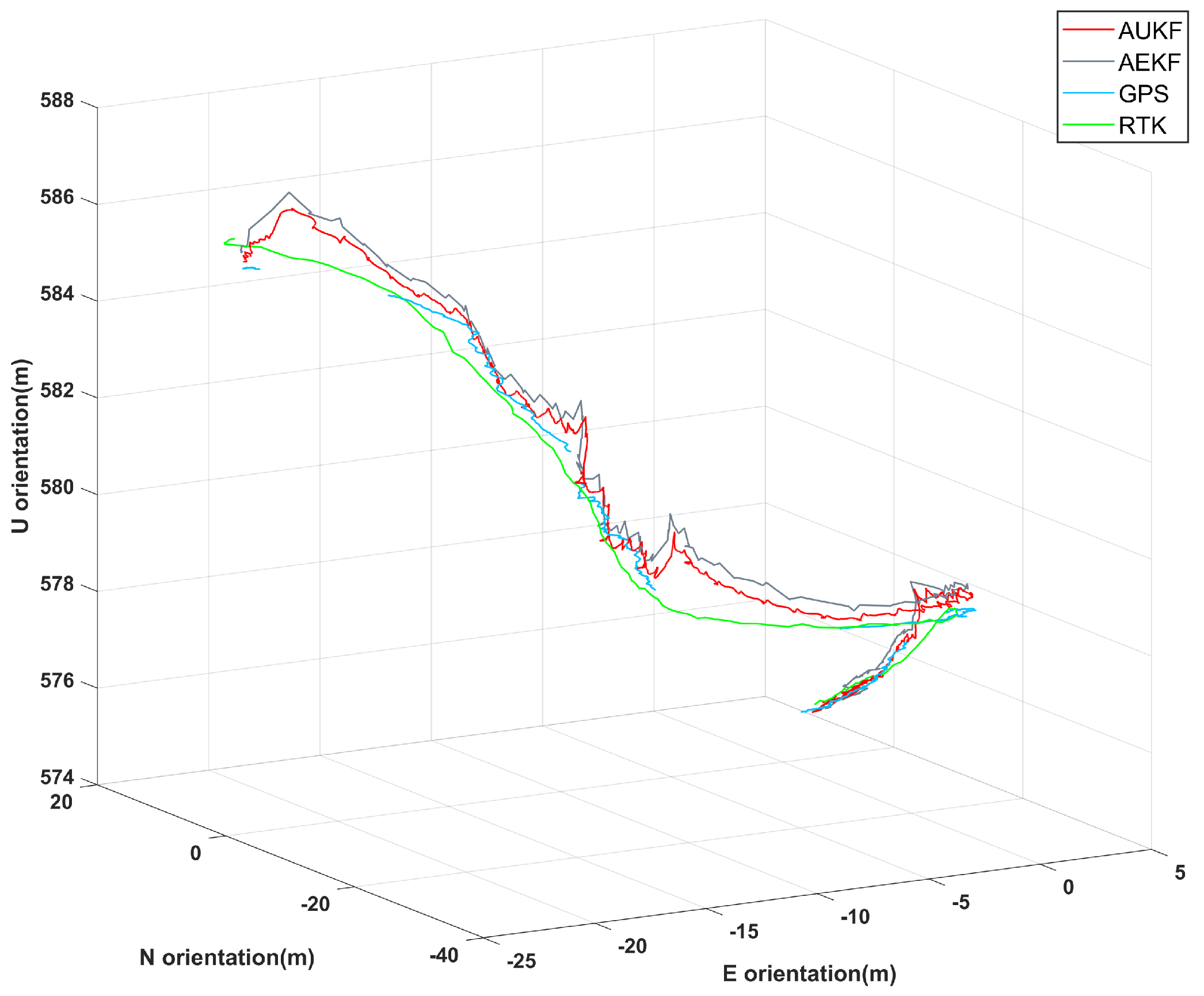
4.2.1. Rugged Terrain Validation in 3D Space
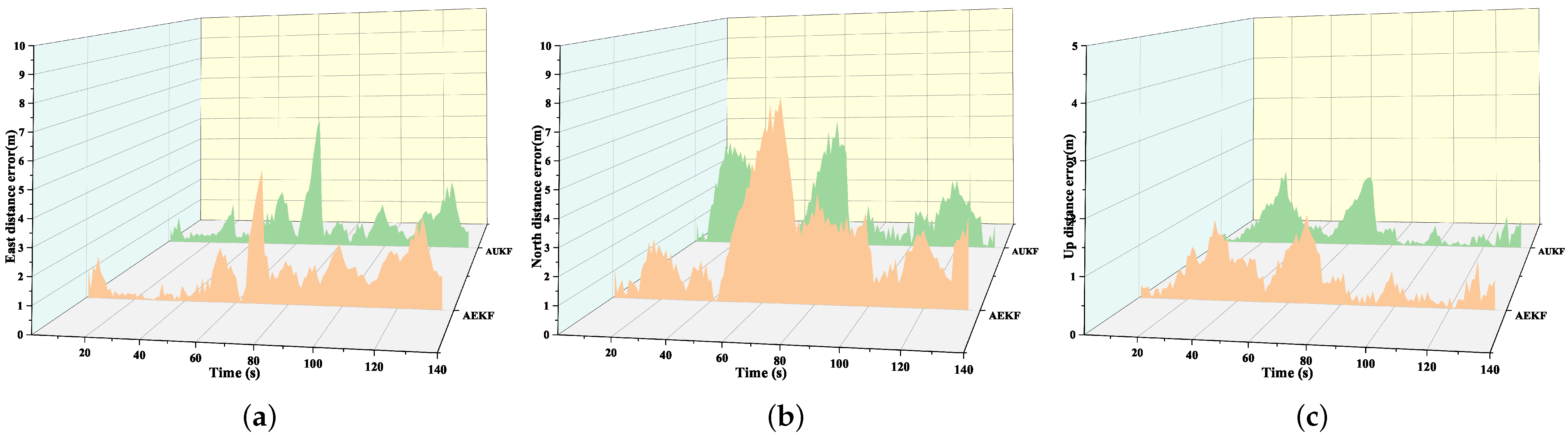
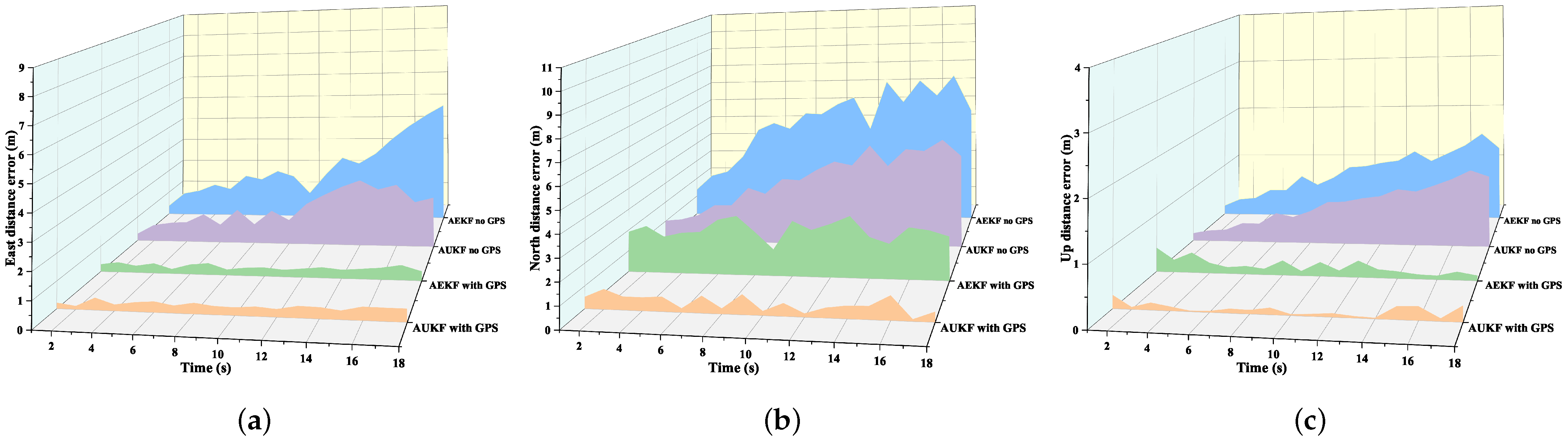
4.2.2. Three-Dimensional Space GPS Signal Interruptions Terrain Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ji, M.; Jeon, J.; Han, K.S.; Cho, Y. Accurate Long-Term Evolution/Wi-Fi Hybrid Positioning Technology for Emergency Rescue. ETRI J. 2023, 45, 939–951. [Google Scholar] [CrossRef]
- Ferreira, A.G.; Fernandes, D.M.; Catarino, A.P.; Monteiro, J.L. Localization and positioning systems for emergency responders: A survey. IEEE Commun. Surv. Tutor. 2017, 19, 2836–2870. [Google Scholar] [CrossRef]
- Irwin, M.A. The Thailand Cave Rescue: General Anaesthesia in Unique Circumstances Presents Ethical Challenges for the Rescue Team. J. Bioethical Inq. 2022, 19, 265–271. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Zhang, Y.; Guo, X.; Chen, X.; Cao, H.; Tang, J.; Liu, J. Seamless GPS/Inertial Navigation System Based on Self-Learning Square-Root Cubature Kalman Filter. IEEE Trans. Ind. Electron. 2020, 68, 499–508. [Google Scholar] [CrossRef]
- Zhu, J.; Kia, S.S. Decentralized Cooperative Localization with LoS and NLoS UWB Inter-Agent Ranging. IEEE Sens. J. 2022, 22, 5447–5456. [Google Scholar] [CrossRef]
- An, J.; Yang, L.; Lee, J. Three-Dimensional Indoor Location Estimation Using Single Inertial Navigation System with Linear Regression. Meas. Sci. Technol. 2019, 30, 105101. [Google Scholar] [CrossRef]
- Katriniok, A.; Abel, D. Adaptive EKF-Based Vehicle State Estimation with Online Assessment of Local Observability. IEEE Trans. Control Syst. Technol. 2016, 24, 1368–1381. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, J.; Jiang, C.; Jing, P.; Liu, Y. Learning-Based Stance-Phase Detection for a Pedestrian Dead-Reckoning System with Dynamic Gait Speeds. Meas. Sci. Technol. 2021, 32, 105108. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Xu, X.; Yu, Z.; Li, Z. A Single Foot-Mounted Pedestrian Navigation Algorithm Based on the Maximum Gait Displacement Constraint in Three-Dimensional Space. Meas. Sci. Technol. 2022, 33, 055113. [Google Scholar] [CrossRef]
- Qi, L.; Yu, Y.; Liu, Y.; Gao, C.; Feng, T. Precise 3D Foot-Mounted Indoor Localization System Using Commercial Sensors and Map Matching Approach. Meas. Sci. Technol. 2022, 33, 115117. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A. A New Method for Compensating the Errors of Integrated Navigation Systems Using Artificial Neural Networks. Measurement 2021, 168, 108391. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A. Comparative Analysis of Fusion Algorithms in a Loosely Coupled Integrated Navigation System on the Basis of Real Data Processing. Gyroscopy Navig. 2019, 10, 231–244. [Google Scholar] [CrossRef]
- Vanicek, P.; Omerbasic, M. Does a Navigation Algorithm Have to Use a Kalman Filter? Can. Aeronaut. Space J. 1999, 45, 292–296. [Google Scholar]
- Sharaf, R.; Taha, M.R.; Tarbouchi, M.; Noureldin, A. Merits and Limitations of Using Fuzzy Inference System for Temporal Integration of INS/GPS in Vehicular Navigation. Soft Comput. 2007, 11, 889–900. [Google Scholar] [CrossRef]
- Zhang, X.; Bai, Y.; Chai, S. State Estimation for GPS Outage Based on Improved Nonlinear Autoregressive Model. In Proceedings of the 2018 IEEE 9th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 November 2018; pp. 840–843. [Google Scholar] [CrossRef]
- Rossi, Y.; Tatsis, K.; Hohensinn, R.; Clinton, J.; Chatzi, E.; Rothacher, M. Unscented Kalman Filter–Based Fusion of GNSS, Accelerometer, Rotat. Sens. Motion Track. J. Struct. Eng. 2024, 150, 05024002. [Google Scholar] [CrossRef]
- Park, G. Optimal Vehicle Position Estimation Using Adaptive Unscented Kalman Filter Based on Sensor Fusion. Mechatronics 2024, 99, 103144. [Google Scholar] [CrossRef]
- Suvorkin, V.; Garcia-Fernandez, M.; González-Casado, G.; Li, M.; Rovira-Garcia, A. Assessment of Noise of MEMS IMU Sensors of Different Grades for GNSS/IMU Navigation. Sensors 2024, 24, 1953. [Google Scholar] [CrossRef]
- Franchi, M.; Ridolfi, A.; Allotta, B. Underwater Navigation with 2D Forward Looking SONAR: An Adaptive Unscented Kalman Filter-Based Strategy for AUVs. J. Field Robot. 2021, 38, 355–385. [Google Scholar] [CrossRef]
- Sun, J.; Tao, L.; Niu, Z.; Zhu, B. An Improved Adaptive Unscented Kalman Filter with Application in the Deeply Integrated BDS/INS Navigation System. IEEE Access 2020, 8, 95321–95332. [Google Scholar] [CrossRef]
- Yuan, S.; Zhang, Y.; Shi, Y.; Li, Z. A Novel ESKF Based ZUPT Using Midpoint Integration Approach for Indoor Pedestrian Navigation. IEEE Sens. J. 2024, 24, 1953. [Google Scholar] [CrossRef]
- Akca, T.; DemiRekler, M. An Adaptive Unscented Kalman Filter for Tightly Coupled INS/GPS Integration. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 389–395. [Google Scholar] [CrossRef]
- Song, Q.; Qi, J.; Han, J. An Adaptive UKF Algorithm and Its Application in Mobile Robot Control. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kunming, China, 17–20 December 2006; pp. 389–395. [Google Scholar] [CrossRef]
- Kulikov, G.Y.; Kulikova, M.V. Hyperbolic-SVD-Based Square-Root Unscented Kalman Filters in Continuous-Discrete Target Tracking Scenarios. IEEE Trans. Autom. Control 2021, 67, 366–373. [Google Scholar] [CrossRef]
- Kaixin, L.; Ying, F. Application of AUKF in GNSS/INS Integrated Navigation. J. Chin. Soc. Navig. 2018, 34, 105–108. [Google Scholar] [CrossRef]
- Chen, Y.; Yan, H.; Li, Y. Vehicle State Estimation Based on Sage–Husa Adaptive Unscented Kalman Filtering. World Electr. Veh. J. 2023, 14, 167. [Google Scholar] [CrossRef]
- Demirci, M.; Gözde, H.; Taplamacioglu, M.C. Improvement of Power Transformer Fault Diagnosis by Using Sequential Kalman Filter Sensor Fusion. Int. J. Electr. Power Energy Syst. 2023, 149, 109038. [Google Scholar] [CrossRef]
- Mahmoud, A.; Noureldin, A.; Hassanein, H.S. Integrated Positioning for Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 397–409. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Sampling Rate | Measurement Accuracy (Output Noise) | Measurement Range | |
|---|---|---|---|---|
| IMU sensors | Accelerometer (JY901B) | 200 Hz | 0.75 1 mg—RMS | ±16 g |
| Gyroscope (JY901B) | 0.028∼0.07 (deg/s)—RMS | ±2000 deg/s | ||
| Barometer (JY901B) | 0.5 Pa—RMS | 300∼1100 hPa | ||
| GPS sensors | M10050 | 10 Hz | position: 2.0 m—CEP | |
| velocity: 0.05 m/s—RMS | ||||
| course angle: 0.3 deg—RMS | ||||
| RTK | QianXunSRmini | 1 Hz | horizontal: ±(D) mm | |
| vertical: ±(D) mm | ||||
| Method | Orientation | RMSE (m) | PAG (%) | MPE (m) |
|---|---|---|---|---|
| IMU | E | 1.5936 | −149.98 | 5.048 |
| N | 4.3166 | −649.28 | 12.0848 | |
| GPS | E | 0.6375 | 0 | 2.3728 |
| N | 0.5761 | 0 | 1.9273 | |
| AUKF | E | 0.3014 | 52.72 | 1.0655 |
| N | 0.2923 | 49.26 | 0.9877 |
| Test Scenario | Start Longitude | Start Latitude | End Longitude | End Latitude | Altitude Difference (m) |
|---|---|---|---|---|---|
| Rugged terrain | 108.88437 | 34.02897 | 108.88408 | 34.02888 | 22.152 |
| Terrain with GPS interruption | 108.88429 | 34.01796 | 108.88414 | 34.01787 | 10.732 |
| Method | Orientation | RMSE (m) | PAG (%) | MPE (m) |
|---|---|---|---|---|
| EKF | E | 1.1421 | 23.72 | 3.3767 |
| N | 2.7159 | −5.83 | 8.1469 | |
| U | 1.0339 | −1.95 | 1.9770 | |
| UKF | E | 1.3325 | 11.00 | 4.4739 |
| N | 2.4705 | 24.53 | 6.6933 | |
| U | 0.9751 | 3.87 | 1.9489 | |
| AEKF | E | 1.1729 | 21.69 | 3.2335 |
| N | 2.5075 | 2.34 | 7.6206 | |
| U | 1.0042 | 1.01 | 1.7159 | |
| AUKF | E | 1.0981 | 26.66 | 3.8814 |
| N | 2.2184 | 13.55 | 5.8957 | |
| U | 0.9459 | 6.75 | 1.5588 |
| State of Operation | Time (s) | Orientation | RMSE (m) | MPE (m) |
|---|---|---|---|---|
| Complete process | 140 | E | 1.0636 | 2.6108 |
| N | 2.3744 | 5.1931 | ||
| U | 0.5102 | 1.3444 | ||
| No GPS coverage | 18 | E | 1.5907 | 2.6108 |
| N | 3.5057 | 5.1931 | ||
| U | 0.8014 | 1.3444 | ||
| With GPS coverage | 18 | E | 0.3473 | 0.4631 |
| N | 0.5731 | 1.0230 | ||
| U | 0.2159 | 0.2441 |
| State of Operation | Time (s) | Orientation | RMSE (m) | MPE (m) |
|---|---|---|---|---|
| Complete process | 140 | E | 1.2645 | 4.8705 |
| N | 2.7402 | 7.5571 | ||
| U | 0.5778 | 1.6192 | ||
| No GPS coverage | 18 | E | 1.7429 | 4.8705 |
| N | 3.9408 | 7.5571 | ||
| U | 0.9421 | 1.6192 | ||
| With GPS coverage | 18 | E | 0.4169 | 0.5497 |
| N | 0.6905 | 2.8092 | ||
| U | 0.2621 | 0.4135 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, S.; Zhang, B.; Lu, J.; Pan, R.; Wang, H.; Wang, Z.; Xu, S. Application of IMU/GPS Integrated Navigation System Based on Adaptive Unscented Kalman Filter Algorithm in 3D Positioning of Forest Rescue Personnel. Sensors 2024, 24, 5873. https://doi.org/10.3390/s24185873
Pang S, Zhang B, Lu J, Pan R, Wang H, Wang Z, Xu S. Application of IMU/GPS Integrated Navigation System Based on Adaptive Unscented Kalman Filter Algorithm in 3D Positioning of Forest Rescue Personnel. Sensors. 2024; 24(18):5873. https://doi.org/10.3390/s24185873
Chicago/Turabian StylePang, Shengli, Bohan Zhang, Jintian Lu, Ruoyu Pan, Honggang Wang, Zhe Wang, and Shiji Xu. 2024. "Application of IMU/GPS Integrated Navigation System Based on Adaptive Unscented Kalman Filter Algorithm in 3D Positioning of Forest Rescue Personnel" Sensors 24, no. 18: 5873. https://doi.org/10.3390/s24185873
APA StylePang, S., Zhang, B., Lu, J., Pan, R., Wang, H., Wang, Z., & Xu, S. (2024). Application of IMU/GPS Integrated Navigation System Based on Adaptive Unscented Kalman Filter Algorithm in 3D Positioning of Forest Rescue Personnel. Sensors, 24(18), 5873. https://doi.org/10.3390/s24185873