A Hybrid Algorithm of LSTM and Factor Graph for Improving Combined GNSS/INS Positioning Accuracy during GNSS Interruptions


Abstract
1. Introduction
2. Information Fusion Methods Based on Factor Graphs
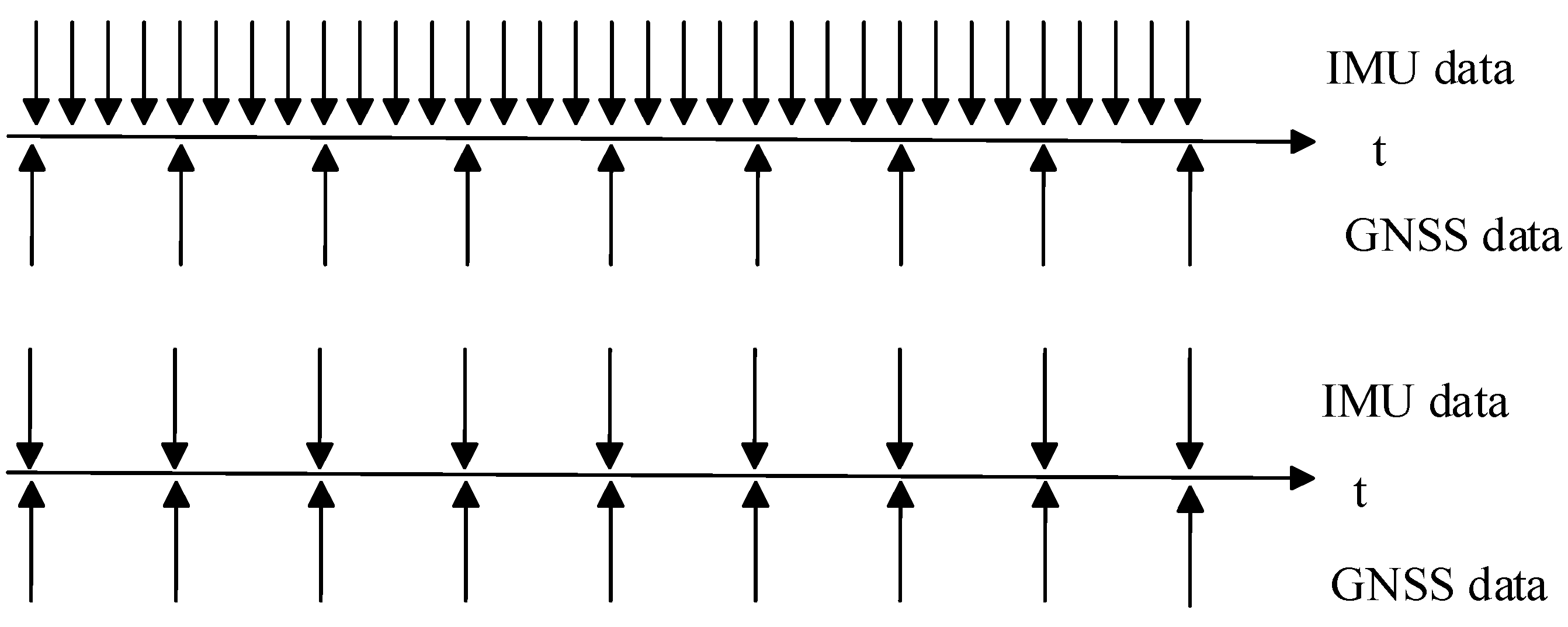
2.1. IMU Pre-Integration Factor Node
2.2. GNSS Factor Nodes
2.3. Factor Graph Model
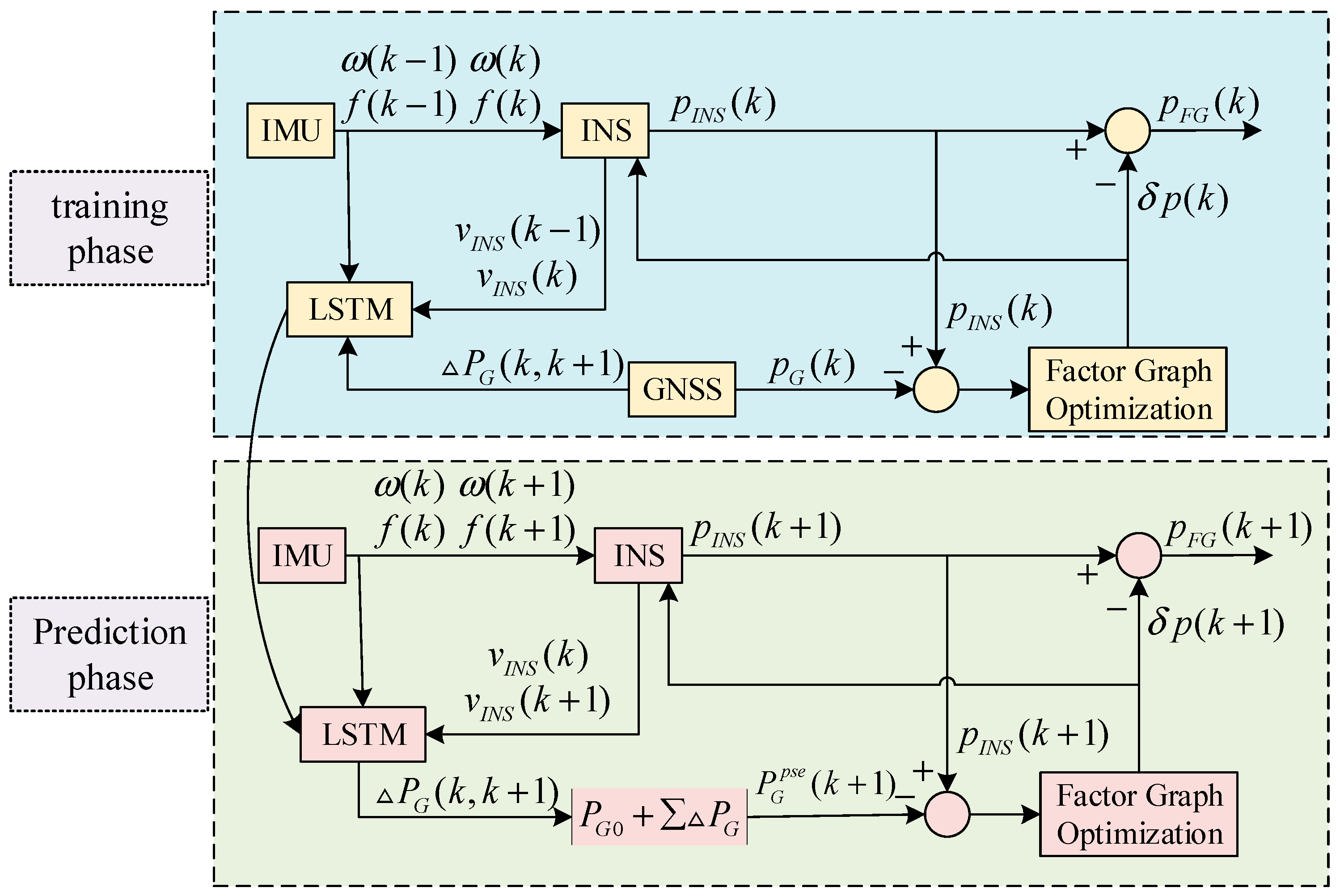
3. LSTM Neural Network Prediction Assisted Positioning Method
3.1. Neural Network Prediction Model Description
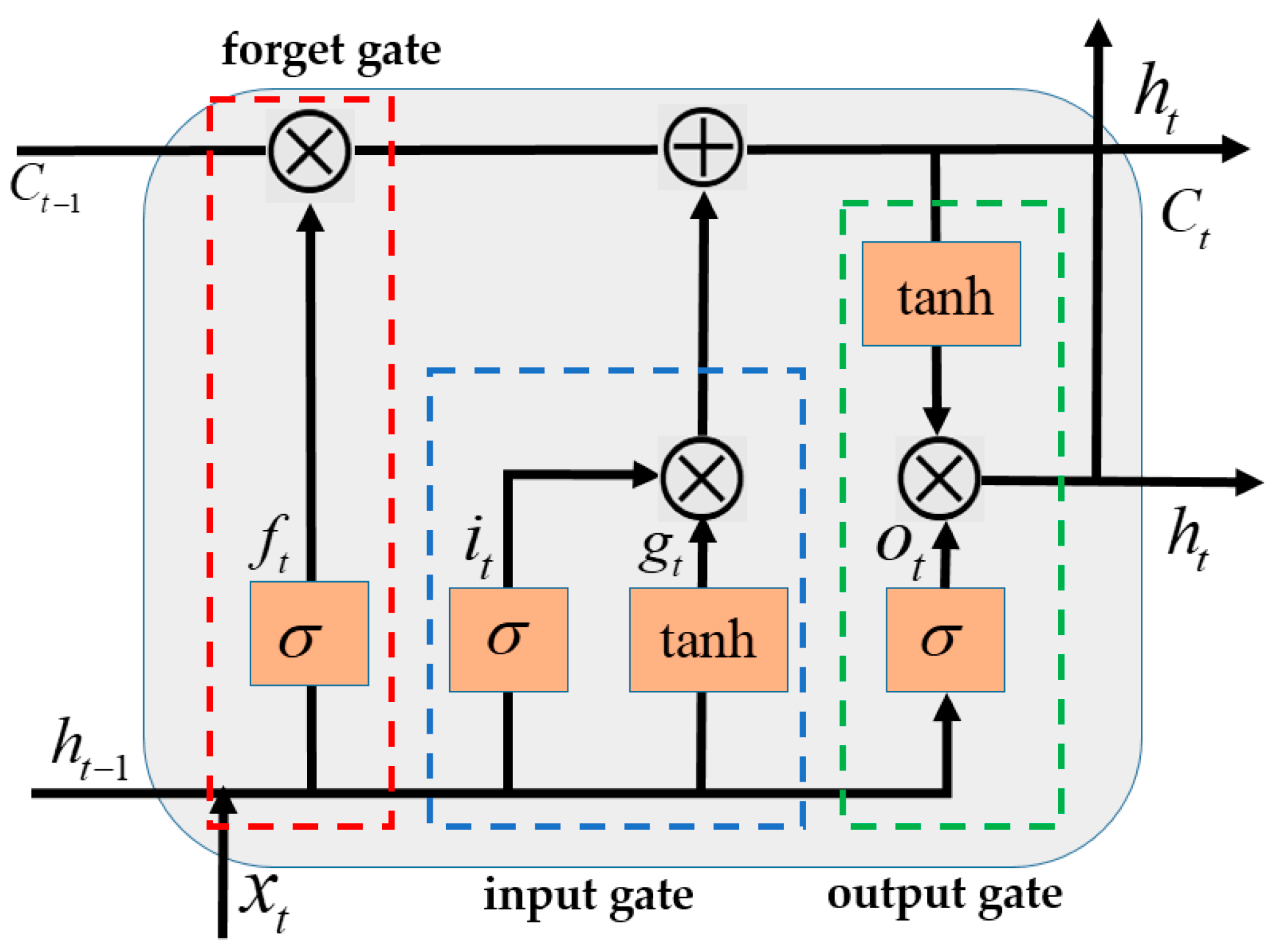
3.2. LSTM Model
4. Experimental Validation and Analysis
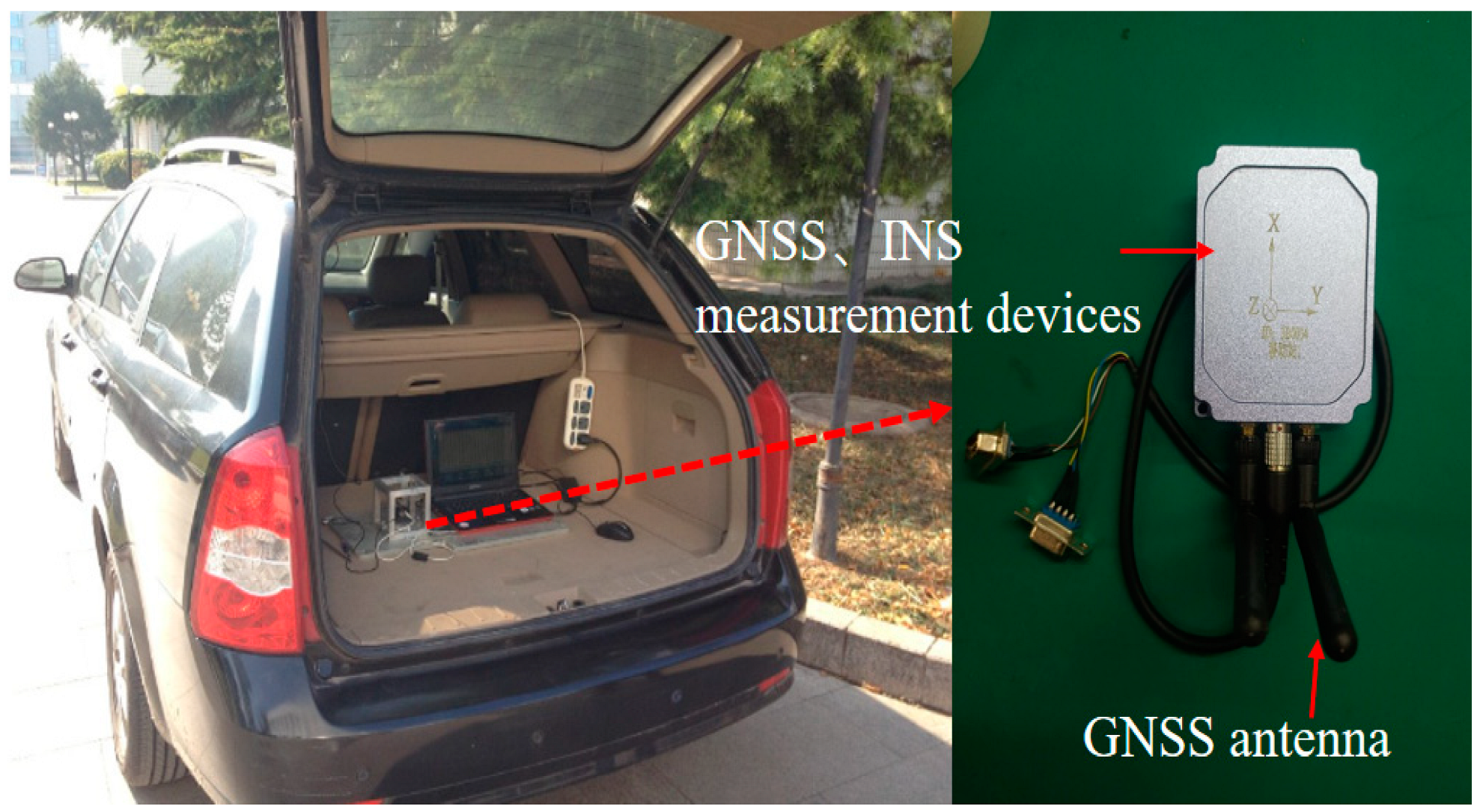
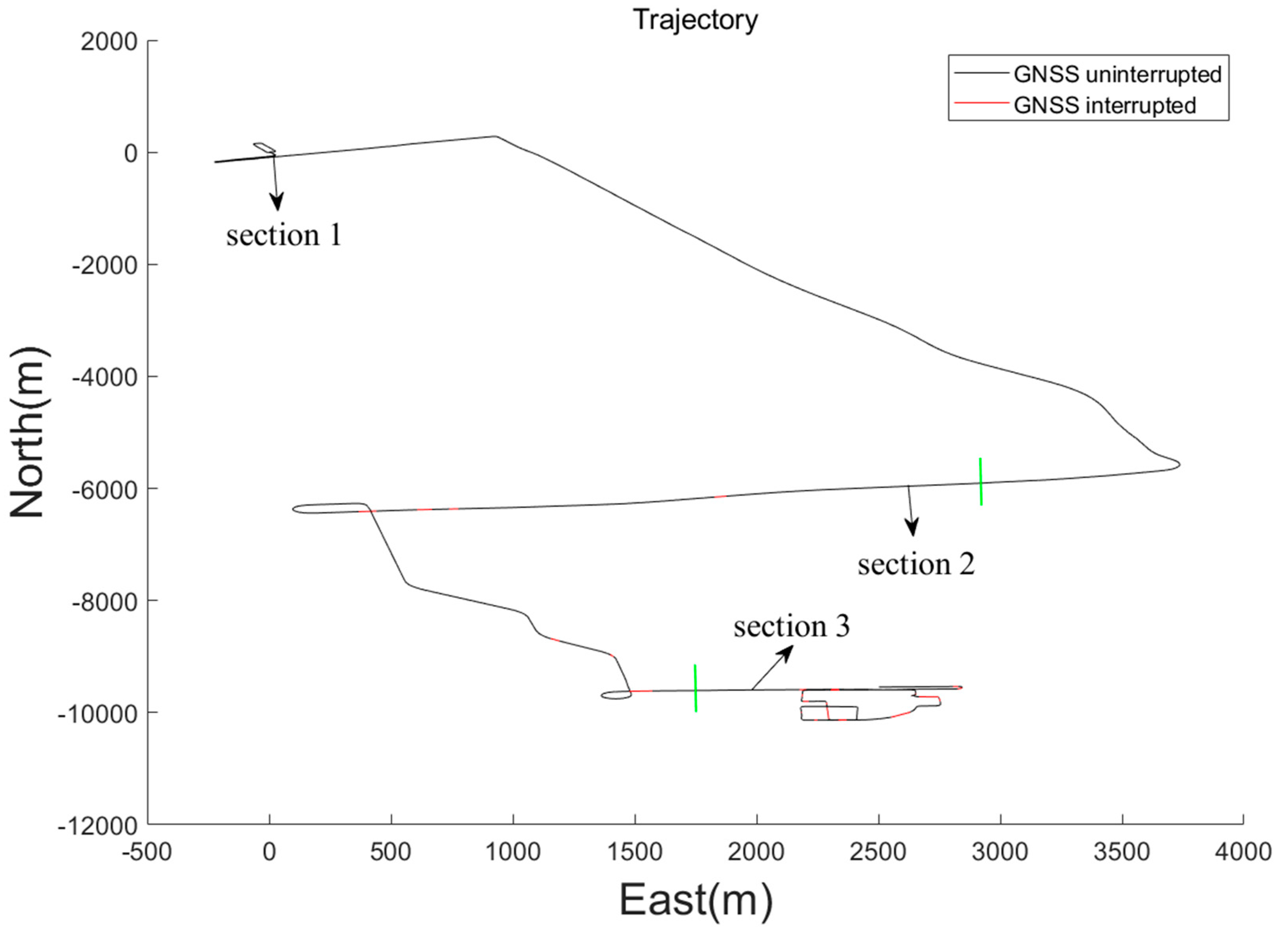
4.1. Experimental Setup and Data Acquisition
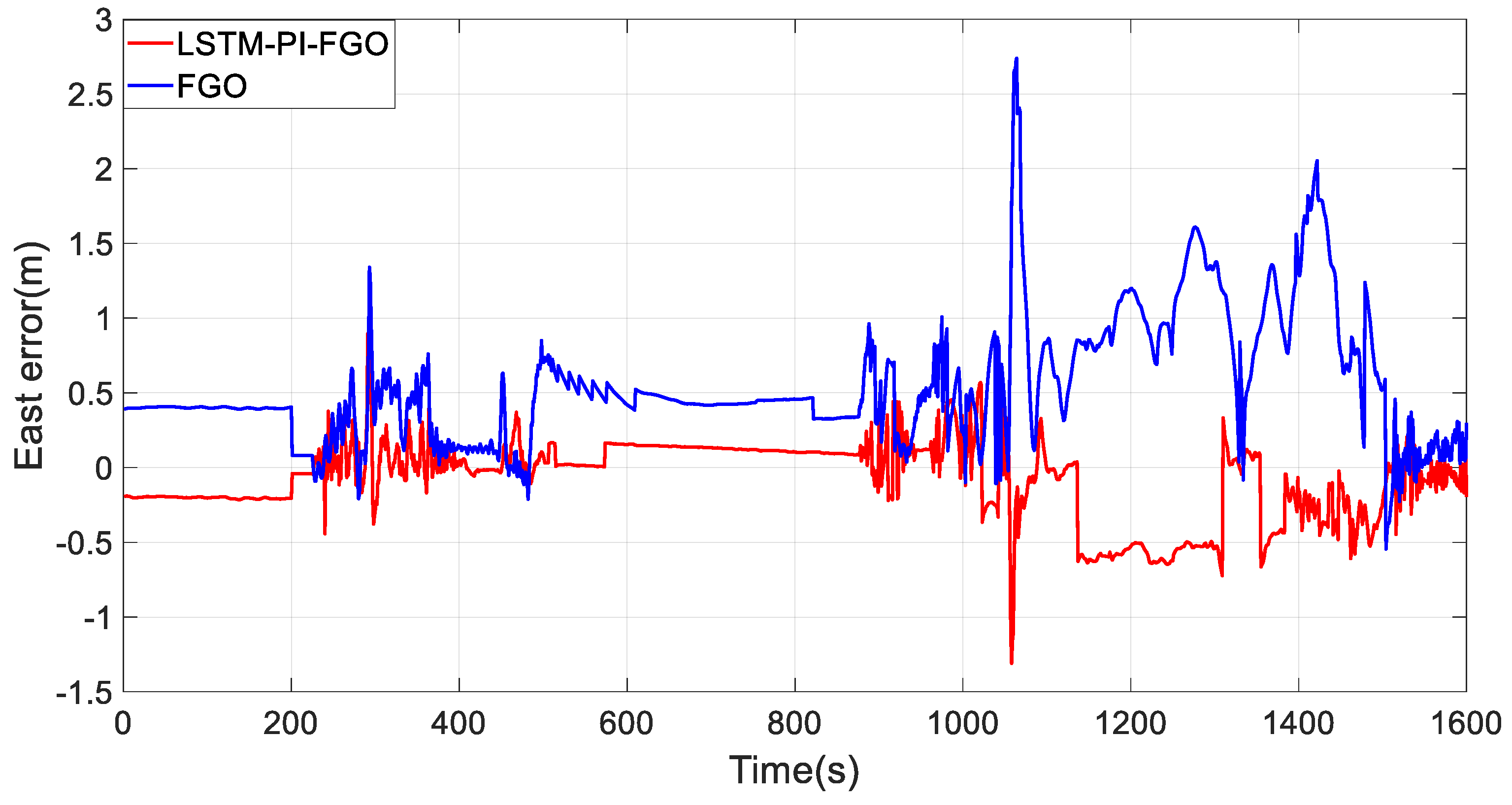
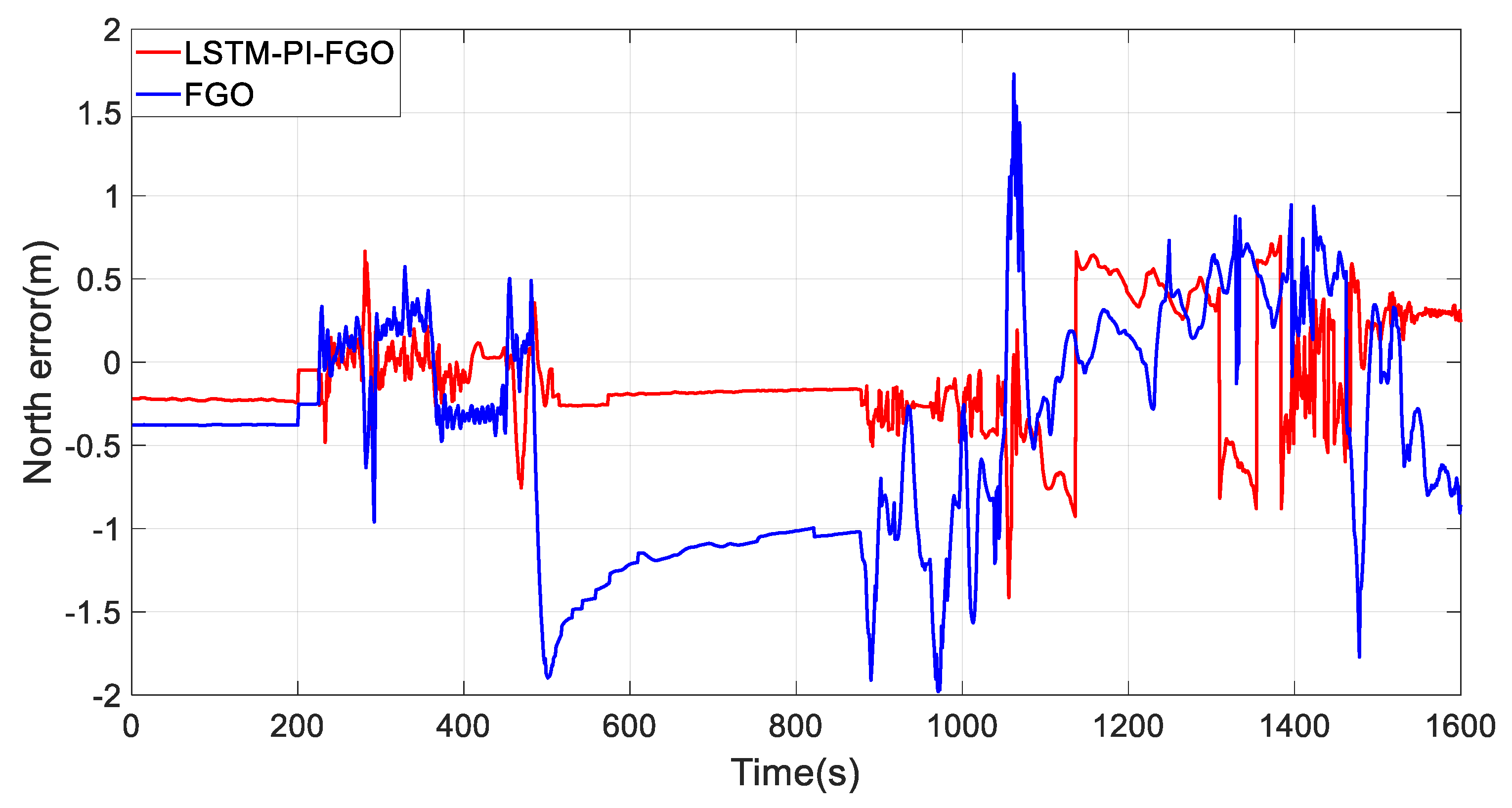
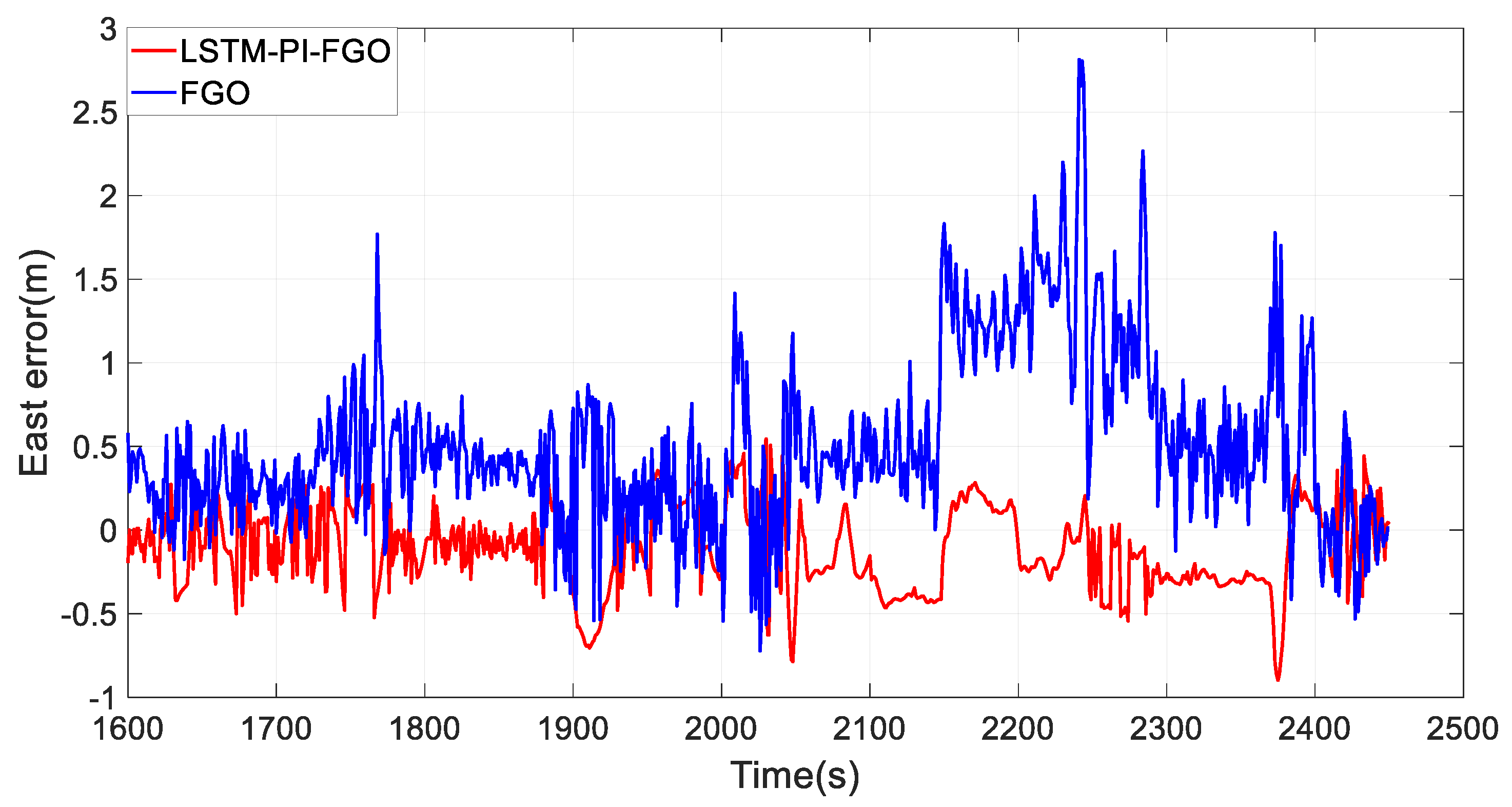
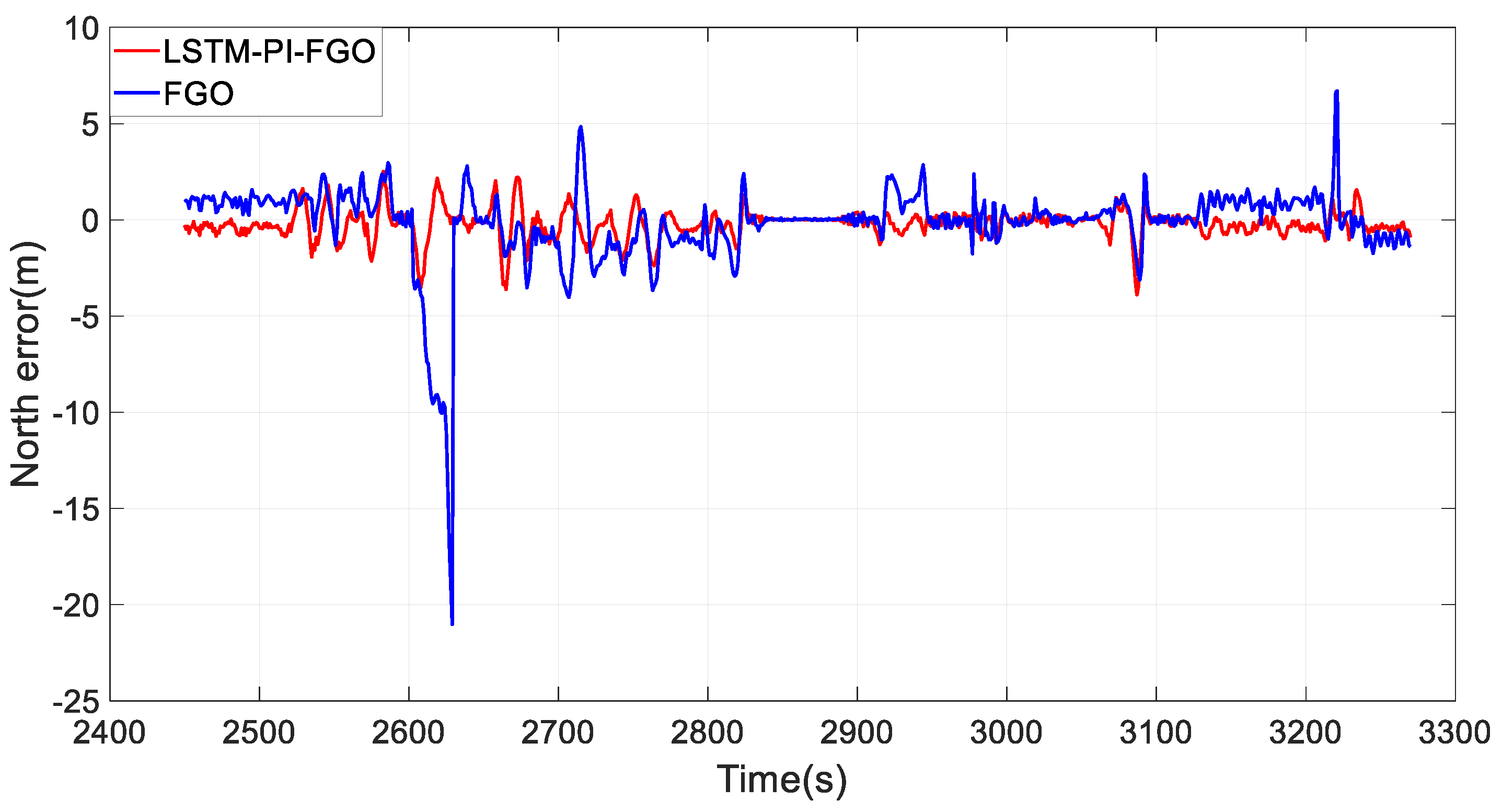
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, S.; Chen, Y.; Farrell, J.A. High-precision vehicle navigation in urban environments using an MEM’s IMU and single-frequency GPS receiver. IEEE Trans. Intel. Trans. Syst. 2016, 17, 2854–2867. [Google Scholar] [CrossRef]
- Jin, S.; Wang, Q.; Dardanelli, G. A review on multi-GNSS for earth observation and emerging applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Hussain, A.; Akhtar, F.; Khand, Z.H.; Rajput, A.; Shaukat, Z. Complexity and limitations of GNSS signal reception in highly obstructed enviroments. Eng. Technol. Appl. Sci. Res. 2021, 11, 6864–6868. [Google Scholar] [CrossRef]
- Zidan, J.; Adegoke, E.I.; Kampert, E.; Birrell, S.A.; Ford, C.R.; Higgins, M.D. GNSS vulnerabilities and existing solutions: A review of the literature. IEEE Access 2020, 9, 153960–153976. [Google Scholar] [CrossRef]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A comprehensive review of GNSS/INS integration techniques for land and air vehicle applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, D.; Zhang, L.; Li, Q.; Wu, J. Tightly coupled GNSS/INS integration with robust sequential kalman filter for accurate vehicular navigation. Sensors 2020, 20, 561. [Google Scholar] [CrossRef] [PubMed]
- Falco, G.; Pini, M.; Marucco, G. Loose and tight GNSS/INS integrations: Comparison of performance assessed in real urban scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.; Liu, H.; Zhou, Y.; Hu, X. Robust state estimation via maximum correntropy EKF on matrix lie groups with application to low-cost INS/GPS integrated navigation system. IEEE Sensors J. 2023, 23, 9467–9479. [Google Scholar] [CrossRef]
- Ibrahim, A.; Abosekeen, A.; Azouz, A.; Noureldin, A. Enhanced Autonomous Vehicle Positioning Using a Loosely Coupled INS/GNSS-Based Invariant-EKF Integration. Sensors 2023, 23, 6097. [Google Scholar] [CrossRef]
- Hu, G.; Gao, B.; Zhong, Y.; Gu, C. Unscented kalman filter with process noise covariance estimation for vehicular INS/GPS integration system. Inf. Fusion 2020, 64, 194–204. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A.I. Neural networks aided unscented Kalman filter for integrated INS/GNSS systems. In Proceedings of the 2020 27th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 25–27 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Wen, W.; Kan, Y.C.; Hsu, L.T. Performance comparison of GNSS/INS integrations based on EKF and factor graph optimization. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Sugimoto, S.; Kubo, Y.; Tanikawara, M. A review and applications of the nonlinear filters to GNSS/INS integrated algorithms. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 3101–3113. [Google Scholar]
- Osman, M.; Hussein, A.; Al-Kaff, A. Intelligent vehicles localization approaches between estimation and information: A review. In Proceedings of the 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–8. [Google Scholar]
- Tang, C.; Zhang, L.; Zhang, Y.; Song, H. Factor graph-assisted distributed cooperative positioning algorithm in the GNSS system. Sensors 2018, 18, 3748. [Google Scholar] [CrossRef] [PubMed]
- Beuchert, J.; Camurri, M.; Fallon, M. Factor graph fusion of raw GNSS sensing with IMU and lidar for precise robot localization without a base station. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 8415–8421. [Google Scholar]
- Zeng, Q.; Chen, W.; Liu, J.; Wang, H. An improved multi-sensor fusion navigation algorithm based on the factor graph. Sensors 2017, 17, 641. [Google Scholar] [CrossRef]
- Bai, S.; Lai, J.; Lyu, P.; Ji, B.; Wang, B.; Sun, X. A novel plug-and-play factor graph method for asynchronous absolute/relative measurements fusion in multisensor positioning. IEEE Trans. Ind. Electron. 2022, 70, 940–950. [Google Scholar] [CrossRef]
- Wen, W.; Pfeifer, T.; Bai, X.; Hsu, L.T. Factor graph optimization for GNSS/INS integration: A comparison with the extended kalman filter. NAVIGATION J. Inst. Navig. 2021, 68, 315–331. [Google Scholar] [CrossRef]
- Song, Y.; Hsu, L.T. Tightly coupled integrated navigation system via factor graph for UAV indoor localization. Aerosp. Sci. Technol. 2021, 108, 106370. [Google Scholar] [CrossRef]
- Xu, J.; Yang, G.; Sun, Y.; Picek, S. A multi-sensor information fusion method based on factor graph for integrated navigation system. IEEE Access 2021, 9, 12044–12054. [Google Scholar] [CrossRef]
- Zhang, G.; Ng, H.F.; Wen, W.; Hsu, L.T. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization. IEEE Trans. Intell. Trans. Syst. 2020, 22, 6175–6187. [Google Scholar] [CrossRef]
- Cao, S.; Lu, X.; Shen, S. GVINS: Tightly coupled GNSS–visual–inertial fusion for smooth and consistent state estimation. IEEE Trans. Robot. 2022, 38, 2004–2021. [Google Scholar] [CrossRef]
- Wu, X.; Xiao, B.; Wu, C.; Guo, Y.; Li, L. Factor graph based navigation and positioning for control system design: A review. Chin. J. Aeronaut. 2022, 35, 25–39. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A.; Khalaf, W. Artificial intelligence based methods for accuracy improvement of integrated navigation systems during GNSS signal outages: An analytical overview. Gyroscopy Navig. 2020, 11, 41–58. [Google Scholar] [CrossRef]
- Siemuri, A.; Kuusniemi, H.; Elmusrati, M.S.; Välisuo, P.; Shamsuzzoha, A. Machine learning utilization in GNSS—Use cases, challenges and future applications. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Jin, S.; Wang, X.; Meng, Q. Spatial memory-augmented visual navigation based on hierarchical deep reinforcement learning in unknown environments. Knowl.-Based Syst. 2024, 285, 111358. [Google Scholar] [CrossRef]
- Jwo, D.J.; Biswal, A.; Mir, I.A. Artificial neural networks for navigation systems: A review of recent research. Appl. Sci. 2023, 13, 4475. [Google Scholar] [CrossRef]
- Liu, N.; Hui, Z.; Su, Z.; Qiao, L.; Dong, Y. Integrated navigation on vehicle based on low-cost SINS/GNSS using deep learning. Wirel. Pers. Commun. 2022, 126, 2043–2064. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Zhu, C.; Chan, C.Y. A hybrid fusion algorithm for GPS/INS integration during GPS outages. Measurement 2017, 103, 42–51. [Google Scholar] [CrossRef]
- Dai, H.; Bian, H.; Wang, R.; Ma, H. An INS/GNSS integrated navigation in GNSS denied environment using recurrent neural network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, Y.; Chen, C.; Jia, J.; Sun, H.; Wang, T.; Hyyppä, J. Smartphone PDR/GNSS integration via factor graph optimization for pedestrian navigation. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, X.; Gao, R.; Pan, L.; Zhang, Q. A multi-sensor fusion positioning approach for indoor mobile robot using factor graph. Measurement 2023, 216, 112926. [Google Scholar] [CrossRef]
- Bai, S.; Lai, J.; Lyu, P.; Wang, B.; Sun, X.; Yu, W. An Enhanced Adaptable Factor Graph for Simultaneous Localization and Calibration in GNSS/IMU/Odometer Integration. IEEE Trans. Veh. Technol. 2023, 72, 11346–11357. [Google Scholar] [CrossRef]
- Brossard, M.; Barrau, A.; Chauchat, P.; Bonnabel, S. Associating uncertainty to extended poses for on lie group imu preintegration with rotating earth. IEEE Trans. Rob. 2021, 38, 998–1015. [Google Scholar] [CrossRef]
- Liu, J.; Chen, X.; Sun, J.; Liu, Q. An analysis of GPT2/GPT2w+ Saastamoinen models for estimating zenith tropospheric delay over Asian area. Adv. Space Res. 2017, 59, 824–832. [Google Scholar] [CrossRef]
- Li, X.; Yu, H.; Wang, X.; Li, S.; Zhou, Y.; Chang, H. FGO-GIL: Factor graph optimization-based GNSS RTK/INS/LiDAR Tightly Coupled Integration for precise and continuous navigation. IEEE Sens. J. 2023, 23, 14534–14548. [Google Scholar] [CrossRef]
- Wei, X.; Li, J.; Zhang, D.; Feng, K. An improved integrated navigation method with enhanced robustness based on factor graph. Mech. Syst. Signal Process. 2021, 155, 107565. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A. A new method for compensating the errors of integrated navigation systems using artificial neural networks. Measurement 2021, 168, 108391. [Google Scholar] [CrossRef]
- Chen, Y.; Jiang, W.; Wang, J.; Cai, B.; Liu, D.; Ba, X.; Yang, Y. A LSTM-assisted GNSS/INS integration system using IMU recomputed error information for train localization. IEEE Trans. Aerosp. Electro. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM algorithm estimating pseudo measurements for aiding INS during GNSS signal outages. Remote Sens. 2020, 12, 256. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Learning Rate | 0.005 |
| Learning Rate Decay Factor | 0.5 |
| Number of Hidden Units | 100 |
| Number of Epochs | 200 |
| Optimizer | Adam |
| Sensor | Parameters | Accuracy |
|---|---|---|
| IMU | Gyroscope Bias | 20°/hr |
| Gyroscope Random Walk | ||
| Accelerometer Bias | 50 mg | |
| Sampling Frequency | 100 Hz | |
| GNSS | Position Accuracy | 2 m |
| Sampling Frequency | 1 Hz |
| Section | Start Time (s) | Interruption Duration (s) | Section | Start Time (s) | Interruption Duration (s) |
|---|---|---|---|---|---|
| 2 | 1765 | 6 | 3 | 2696 | 17 |
| 2 | 1928 | 5 | 3 | 2758 | 9 |
| 2 | 1944 | 7 | 3 | 2813 | 2 |
| 2 | 1968 | 7 | 3 | 2897 | 2 |
| 2 | 2240 | 5 | 3 | 2985 | 5 |
| 2 | 2283 | 4 | 3 | 3002 | 27 |
| 2 | 2416 | 9 | 3 | 3038 | 6 |
| 3 | 2525 | 4 | 3 | 3085 | 6 |
| 3 | 2545 | 6 | 3 | 3109 | 6 |
| 3 | 2598 | 3 | 3 | 3147 | 4 |
| 3 | 2612 | 15 | 3 | 3215 | 8 |
| 3 | 2628 | 2 | 3 | 3231 | 4 |
| 3 | 2635 | 8 |
| Section | Algorithm | Orientation | RMSE (m) | Maximum Error (m) |
|---|---|---|---|---|
| 1 | LSTM-PI-FGO | east | 0.27 | 1.31 |
| north | 0.33 | 1.41 | ||
| FGO | east | 0.69 | 2.74 | |
| north | 0.78 | 1.98 | ||
| 2 | LSTM-PI-FGO | east | 0.27 | 0.90 |
| north | 0.37 | 1.19 | ||
| FGO | east | 0.73 | 2.81 | |
| north | 1.10 | 4.46 | ||
| 3 | LSTM-PI-FGO | east | 0.79 | 3.41 |
| north | 0.79 | 3.89 | ||
| FGO | east | 2.40 | 16.08 | |
| north | 2.16 | 21.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Zhao, H.; Chen, W. A Hybrid Algorithm of LSTM and Factor Graph for Improving Combined GNSS/INS Positioning Accuracy during GNSS Interruptions. Sensors 2024, 24, 5605. https://doi.org/10.3390/s24175605
Liu F, Zhao H, Chen W. A Hybrid Algorithm of LSTM and Factor Graph for Improving Combined GNSS/INS Positioning Accuracy during GNSS Interruptions. Sensors. 2024; 24(17):5605. https://doi.org/10.3390/s24175605
Chicago/Turabian StyleLiu, Fuchao, Hailin Zhao, and Wenjue Chen. 2024. "A Hybrid Algorithm of LSTM and Factor Graph for Improving Combined GNSS/INS Positioning Accuracy during GNSS Interruptions" Sensors 24, no. 17: 5605. https://doi.org/10.3390/s24175605
APA StyleLiu, F., Zhao, H., & Chen, W. (2024). A Hybrid Algorithm of LSTM and Factor Graph for Improving Combined GNSS/INS Positioning Accuracy during GNSS Interruptions. Sensors, 24(17), 5605. https://doi.org/10.3390/s24175605