
Unravelling Influence Factors in Pattern Recognition Myoelectric Control Systems: The Impact of Limb Positions and Electrode Shifts

Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experimental Setup
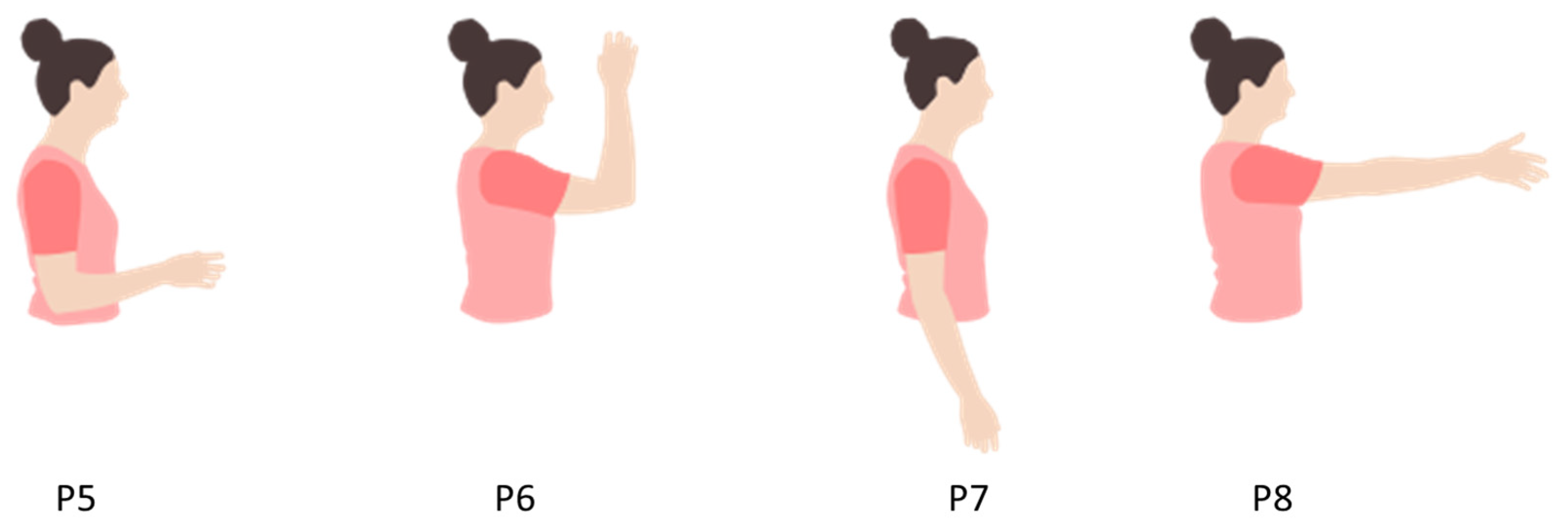
2.2.1. Limb Position Sessions
2.2.2. Electrode Shift Sessions
2.3. Signal Processing and Feature Extraction
2.4. Data Analysis
2.4.1. Between Factors Analysis
2.4.2. Feature Space Quantification
- Repeatability index (RI)
- Modified separability index (mSI)
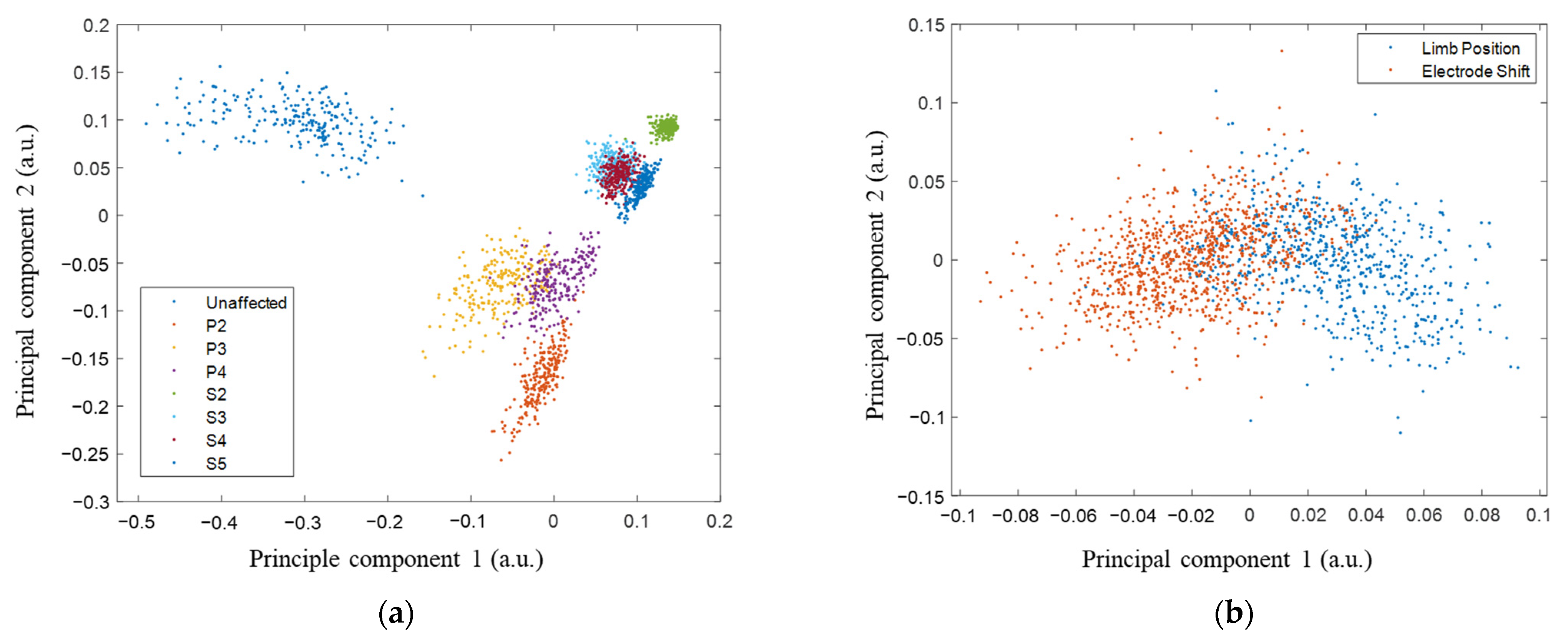
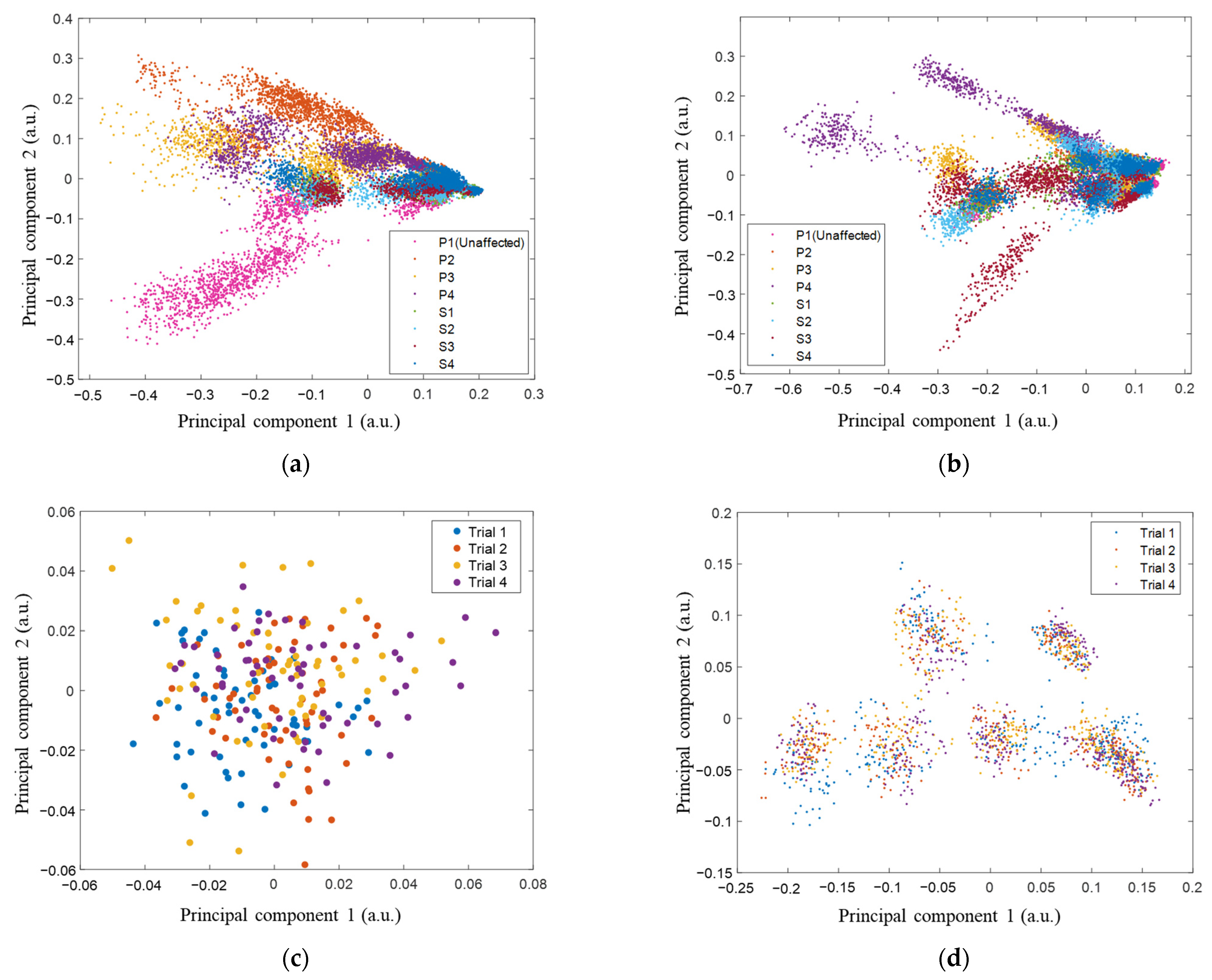
2.4.3. Effect of Factors on Class Distributions
2.4.4. Effect of Limb Position on Class Distributions on Amputees
3. Results
3.1. Between Factor Analysis
3.2. Feature Space Quantification
3.3. Effect of Factors on Class Distributions
3.4. Effect of Limb Position on Class Distributions on Amputees
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Farina, D.; Vujaklija, I.; Brånemark, R.; Bull, A.M.J.; Dietl, H.; Graimann, B.; Hargrove, L.J.; Hoffmann, K.-P.; Huang, H.; Ingvarsson, T.; et al. Toward higher-performance bionic limbs for wider clinical use. Nat. Biomed. Eng. 2021, 7, 473–485. [Google Scholar] [CrossRef] [PubMed]
- Biddiss, E.A.; Chau, T.T. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthet. Orthot. Int. 2007, 31, 236–257. [Google Scholar] [CrossRef] [PubMed]
- Salminger, S.; Stino, H.; Pichler, L.H.; Gstoettner, C.; Sturma, A.; Mayer, J.A.; Szivak, M.; Aszmann, O.C. Current rates of prosthetic usage in upper-limb amputees—have innovations had an impact on device acceptance? Disabil. Rehabil. 2022, 44, 3708–3713. [Google Scholar] [CrossRef] [PubMed]
- Castellini, C. Chapter 19—Upper Limb Active Prosthetic systems—Overview. In Wearable Robotics; Rosen, J., Ferguson, P.W., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 365–376. [Google Scholar]
- Simon, A.M.; Turner, K.L.; Miller, L.A.; Potter, B.K.; Beachler, M.D.; Dumanian, G.A.; Hargrove, L.J.; Kuiken, T.A. User performance with a transradial multi-articulating hand prosthesis during pattern recognition and direct control home use. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 31, 271–281. [Google Scholar] [CrossRef]
- He, J.; Sheng, X.; Zhu, X.; Jiang, N. Position Identification for Robust Myoelectric Control Against Electrode Shift. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 3121–3128. [Google Scholar] [CrossRef] [PubMed]
- Sae-lim, W.; Phukpattaranont, P.; Thongpull, K. Effect of Electrode Skin Impedance on Electromyography Signal Quality. In Proceedings of the 2018 15th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Pattaya, Thailand, 18–21 July 2018; pp. 748–751. [Google Scholar]
- Diaz-Amador, R.; Mendoza-Reyes, M. Towards the reduction of the effects of muscle fatigue on myoelectric control of upper limb prostheses. DYNA 2019, 86, 110–116. [Google Scholar] [CrossRef]
- Hahne, J.M.; Markovic, M.; Farina, D. User adaptation in Myoelectric Man-Machine Interfaces. Sci. Rep. 2017, 7, 4437. [Google Scholar] [CrossRef] [PubMed]
- Campbell, E.; Phinyomark, A.; Scheme, E. Current Trends and Confounding Factors in Myoelectric Control: Limb Position and Contraction Intensity. Sensors 2020, 20, 1613. [Google Scholar] [CrossRef] [PubMed]
- Fougner, A.; Scheme, E.; Chan, A.D.C.; Englehart, K.; Stavdahl, O. Resolving the Limb Position Effect in Myoelectric Pattern Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 644–651. [Google Scholar] [CrossRef]
- Jochumsen, M.; Waris, A.; Kamavuako, E.N. The effect of arm position on classification of hand gestures with intramuscular EMG. Biomed. Signal Process. Control 2018, 43, 1–8. [Google Scholar] [CrossRef]
- Teh, Y.; Hargrove, L.J. Understanding Limb Position and External Load Effects on Real-Time Pattern Recognition Control in Amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1605–1613. [Google Scholar] [CrossRef]
- Rainoldi, A.; Nazzaro, M.; Merletti, R.; Farina, D.; Caruso, I.; Gaudenti, S. Geometrical factors in surface EMG of the vastus medialis and lateralis muscles. J. Electromyogr. Kinesiol. 2000, 10, 327–336. [Google Scholar] [CrossRef] [PubMed]
- Young, A.J.; Hargrove, L.J.; Kuiken, T.A. The Effects of Electrode Size and Orientation on the Sensitivity of Myoelectric Pattern Recognition Systems to Electrode Shift. IEEE Trans. Biomed. Eng. 2011, 58, 2537–2544. [Google Scholar] [CrossRef] [PubMed]
- Barsotti, M.; Dupan, S.; Vujaklija, I.; Došen, S.; Frisoli, A.; Farina, D. Online Finger Control Using High-Density EMG and Minimal Training Data for Robotic Applications. IEEE Robot. Autom. Lett. 2019, 4, 217–223. [Google Scholar] [CrossRef]
- Chen, J.; Bi, S.; Zhang, G.; Cao, G. High-Density Surface EMG-Based Gesture Recognition Using a 3D Convolutional Neural Network. Sensors 2020, 20, 1201. [Google Scholar] [CrossRef] [PubMed]
- He, J.; Sheng, X.; Zhu, X.; Jiang, N. Electrode Density Affects the Robustness of Myoelectric Pattern Recognition System With and Without Electrode Shift. IEEE J. Biomed. Health Inform. 2019, 23, 156–163. [Google Scholar] [CrossRef]
- Al-Timemy, A.H.; Bugmann, G.; Escudero, J.; Outram, N. A preliminary investigation of the effect of force variation for myoelectric control of hand prosthesis. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2013, 2013, 5758–5761. [Google Scholar] [CrossRef]
- Scheme, E.; Biron, K.; Englehart, K. Improving myoelectric pattern recognition positional robustness using advanced training protocols. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 4828–4831. [Google Scholar]
- Gigli, A.; Gijsberts, A.; Castellini, C. The Merits of Dynamic Data Acquisition for Realistic Myocontrol. Front. Bioeng. Biotechnol. 2020, 8, 361. [Google Scholar] [CrossRef]
- Prahm, C.; Schulz, A.; Paaßen, B.; Schoisswohl, J.; Kaniusas, E.; Dorffner, G.; Hammer, B.; Aszmann, O. Counteracting Electrode Shifts in Upper-Limb Prosthesis Control via Transfer Learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 956–962. [Google Scholar] [CrossRef]
- Spieker, V.; Ganguly, A.; Haddadin, S.; Piazza, C. An Adaptive Multi-Modal Control Strategy to Attenuate the Limb Position Effect in Myoelectric Pattern Recognition. Sensors 2021, 21, 7404. [Google Scholar] [CrossRef]
- Wu, L.; Zhang, X.; Wang, K.; Chen, X.; Chen, X. Improved High-Density Myoelectric Pattern Recognition Control Against Electrode Shift Using Data Augmentation and Dilated Convolutional Neural Network. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2637–2646. [Google Scholar] [CrossRef] [PubMed]
- Stango, A.; Negro, F.; Farina, D. Spatial Correlation of High Density EMG Signals Provides Features Robust to Electrode Number and Shift in Pattern Recognition for Myocontrol. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 189–198. [Google Scholar] [CrossRef] [PubMed]
- Ameri, A.; Akhaee, M.A.; Scheme, E.; Englehart, K. A Deep Transfer Learning Approach to Reducing the Effect of Electrode Shift in EMG Pattern Recognition-Based Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 370–379. [Google Scholar] [CrossRef] [PubMed]
- Asogbon, M.G.; Samuel, O.W.; Geng, Y.; Oluwagbemi, O.; Ning, J.; Chen, S.; Ganesh, N.; Feng, P.; Li, G. Towards resolving the co-existing impacts of multiple dynamic factors on the performance of EMG-pattern recognition based prostheses. Comput. Methods Programs Biomed. 2020, 184, 105278. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.; Yang, D.; Huang, Q.; Yang, W.; Liu, H. Robust EMG pattern recognition in the presence of confounding factors: Features, classifiers and adaptive learning. Expert Syst. Appl. 2018, 96, 208–217. [Google Scholar] [CrossRef]
- Osborn, L.E.; Moran, C.W.; Dodd, L.D.; Sutton, E.E.; Norena Acosta, N.; Wormley, J.M.; Pyles, C.O.; Gordge, K.D.; Nordstrom, M.J.; Butkus, J.A.; et al. Monitoring at-home prosthesis control improvements through real-time data logging. J. Neural Eng. 2022, 19, 036021. [Google Scholar] [CrossRef] [PubMed]
- Teh, Y.; Hargrove, L.J. The effects of limb position and external load on offline myoelectric pattern recognition control. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 654–659. [Google Scholar]
- Chen, Z.; Min, H.; Wang, D.; Xia, Z.; Sun, F.; Fang, B. A Review of Myoelectric Control for Prosthetic Hand Manipulation. Biomimetics 2023, 8, 328. [Google Scholar] [CrossRef] [PubMed]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef] [PubMed]
- Bunderson, N.E.; Kuiken, T.A. Quantification of Feature Space Changes With Experience During Electromyogram Pattern Recognition Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 239–246. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, N.; Håkansson, B.; Ortiz-Catalan, M. Classification complexity in myoelectric pattern recognition. J. NeuroEng. Rehabil. 2017, 14, 68. [Google Scholar] [CrossRef]
- Nawfel, J.L.; Englehart, K.B.; Scheme, E.J. A Multi-Variate Approach to Predicting Myoelectric Control Usability. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1312–1327. [Google Scholar] [CrossRef]
- Lee, S.; Lee, D.K. What is the proper way to apply the multiple comparison test? Korean J. Anesth. 2018, 71, 353–360. [Google Scholar] [CrossRef] [PubMed]
- Coapt, LLC. Available online: https://coaptengineering.com/ (accessed on 20 December 2022).
- Ottobock. Myoplus. Available online: https://www.ottobock.com/en-au/Prosthetics/UpperLimb_MyoPlus (accessed on 20 December 2022).
- Zhou, A.; Muller, R.; Rabaey, J. Incremental Learning in Multiple Limb Positions for Electromyography-Based Gesture Recognition using Hyperdimensional Computing. TechRxiv 2021. [Google Scholar] [CrossRef]
- Fan, Z.; Wang, Z.; Li, G.; Wang, R. A canonical correlation analysis based EMG classification algorithm for eliminating electrode shift effect. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 867–870. [Google Scholar]
- Chen, X.; Dong, X.; Feng, Y.; Jiao, Y.; Yu, J.; Song, Y.; Li, X.; Zhang, L.; Hou, P.; Xie, P. Muscle activation patterns and muscle synergies reflect different modes of coordination during upper extremity movement. Front. Hum. Neurosci. 2023, 16, 912440. [Google Scholar] [CrossRef] [PubMed]
- Geng, Y.; Deng, H.; Samuel, O.W.; Cheung, V.; Xu, L.; Li, G. Modulation of muscle synergies for multiple forearm movements under variant force and arm position constraints. J. Neural Eng. 2020, 17, 026015. [Google Scholar] [CrossRef] [PubMed]
- Williams, H.; Shehata, A.W.; Dawson, M.; Scheme, E.; Hebert, J.; Pilarski, P. Recurrent Convolutional Neural Networks as an Approach to Position-Aware Myoelectric Prosthesis Control. IEEE Trans. Biomed. Eng. 2022, 69, 2243–2255. [Google Scholar] [CrossRef] [PubMed]
- Scheme, E.; Fougner, A.; Stavdahl, Ø.; Chan, A.C.; Englehart, K. Examining the adverse effects of limb position on pattern recognition based myoelectric control. Annu. Int. Conf. IEEE. Eng. Med. Biol. Soc. 2010, 2010, 6337–6340. [Google Scholar] [CrossRef]
- Hargrove, L.J.; Miller, L.A.; Turner, K.; Kuiken, T.A. Myoelectric Pattern Recognition Outperforms Direct Control for Transhumeral Amputees with Targeted Muscle Reinnervation: A Randomized Clinical Trial. Sci. Rep. 2017, 7, 13840. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shift Number | Description |
|---|---|
| S0 (P1) * | No electrode shift |
| S1 | Shift all 0.5 cm distally from S0. |
| S2 | Shift all 1.0 cm distally from S0 |
| S3 | Shift all 0.5 cm transversally to the right from S0 |
| S4 | Shift all 1.0 cm transversally to the right from S0 |
| Classification Type | Training and Testing Data | Motions | Predict Classes |
|---|---|---|---|
| Type 1 | Electrode shift and limb position data | Single motion | P1, P2, P3, P4, S1, S2, S3, S4 |
| Type 2 | Electrode shift and limb position data | Single motion | Electrode shift, Limb position |
| Type 3 | Limb position data | All motions | P1, P2, P3, P4 |
| Type 4 | Electrode shift data | All motions | S0 (P1), S1, S2, S3, S4 |
| Type 5 | Electrode shift and limb position data | All motions | P1, P2, P3, P4, S1, S2, S3, S4 |
| Testing Data | ||||
|---|---|---|---|---|
| P1 (Unaffected) | P2 | P3 | P4 | |
| Classification Accuracy (%) | 98.16 ± 5.11 | 85.00 ± 10.51 | 84.00 ± 8.61 | 85.99 ± 8.41 |
| Testing Data | |||||
|---|---|---|---|---|---|
| S0 (Unaffected) | S1 | S2 | S3 | S4 | |
| Classification Accuracy (%) | 98.16 ± 5.11 | 85.96 ± 13.34 | 83.92 ± 11.37 | 84.11 ± 12.88 | 80.89 ± 11.54 |
| Classification Type | Accuracy (%) |
|---|---|
| Type 1 | 96.13 ± 1.44 |
| Type 2 | 99.05 ± 0.98 |
| Type 3 | 82.27 ± 9.14 |
| Type 4 | 67.03 ± 8.65 |
| Type 5 | 65.40 ± 8.23 |
| Classification Type | Motions | Significant Different Motions (p-Value) | ||||||
|---|---|---|---|---|---|---|---|---|
| CH | OH | FL | EX | PN | SN | RT | ||
| Type 1 | 96.52 ± 2.34 | 96.97 ± 2.62 | 95.73 ± 4.01 | 94.26 ± 5.93 | 95.20 ± 3.71 | 96.51 ± 2.42 | 97.75 ± 1.62 | 0.0713 |
| Type 2 | 98.62 ± 1.57 | 98.88 ± 1.39 | 98.57 ± 2.12 | 98.18 ± 2.90 | 99.55 ± 0.51 | 99.68 ± 0.43 | 99.84 ± 0.27 | 0.0094 * |
| Influence Factors | P1 | P2 | P3 | P4 | S1 | S2 | S3 | S4 |
|---|---|---|---|---|---|---|---|---|
| Accuracy (%) | 47.50 ± 3.32 | 48.65 ± 4.93 | 48.96 ± 3.15 | 47.20 ± 4.69 | 47.67 ± 3.87 | 48.28 ± 3.98 | 48.15 ± 3.77 | 48.96 ± 4.22 |
| Testing Data | ||||
|---|---|---|---|---|
| P7 (Unaffected) | P5 | P6 | P8 | |
| Intact-limb | 99.06 ± 0.94 | 84.23 ± 7.18 | 73.37 ± 14.57 | 83.26 ± 7.33 |
| Amputees | 99.22 ± 0.79 | 75.84 ± 21.50 | 71.11 ± 16.99 | 78.83 ± 16.17 |
| Motions | Significant Different Motions (p-Value) | |||||||
|---|---|---|---|---|---|---|---|---|
| CH | OH | FL | EX | PN | SN | RT | ||
| Able-bodied | 99.96 ± 0.14 | 99.03 ± 1.35 | 99.06 ± 1.47 | 98.94 ± 1.57 | 98.64 ± 1.81 | 99.00 ± 1.44 | 99.42 ± 0.78 | 0.9234 |
| Amputees | 99.21 ± 1.12 | 98.57 ± 1.28 | 98.71 ± 1.81 | 98.85 ± 2.38 | 98.29 ± 1.13 | 99.34 ± 0.93 | 98.88 ± 1.59 | 0.2171 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Li, J.; Hargrove, L.; Kamavuako, E.N. Unravelling Influence Factors in Pattern Recognition Myoelectric Control Systems: The Impact of Limb Positions and Electrode Shifts. Sensors 2024, 24, 4840. https://doi.org/10.3390/s24154840
Wang B, Li J, Hargrove L, Kamavuako EN. Unravelling Influence Factors in Pattern Recognition Myoelectric Control Systems: The Impact of Limb Positions and Electrode Shifts. Sensors. 2024; 24(15):4840. https://doi.org/10.3390/s24154840
Chicago/Turabian StyleWang, Bingbin, Jinglin Li, Levi Hargrove, and Ernest Nlandu Kamavuako. 2024. "Unravelling Influence Factors in Pattern Recognition Myoelectric Control Systems: The Impact of Limb Positions and Electrode Shifts" Sensors 24, no. 15: 4840. https://doi.org/10.3390/s24154840
APA StyleWang, B., Li, J., Hargrove, L., & Kamavuako, E. N. (2024). Unravelling Influence Factors in Pattern Recognition Myoelectric Control Systems: The Impact of Limb Positions and Electrode Shifts. Sensors, 24(15), 4840. https://doi.org/10.3390/s24154840