

Design and Implementation of a Two-Wheeled Vehicle Safe Driving Evaluation System
 ,
,
Abstract
1. Introduction
2. Aggressive Driving of Two-Wheeled Vehicles
2.1. Definition of Aggressive Driving
2.2. Aggressive Driving Identification
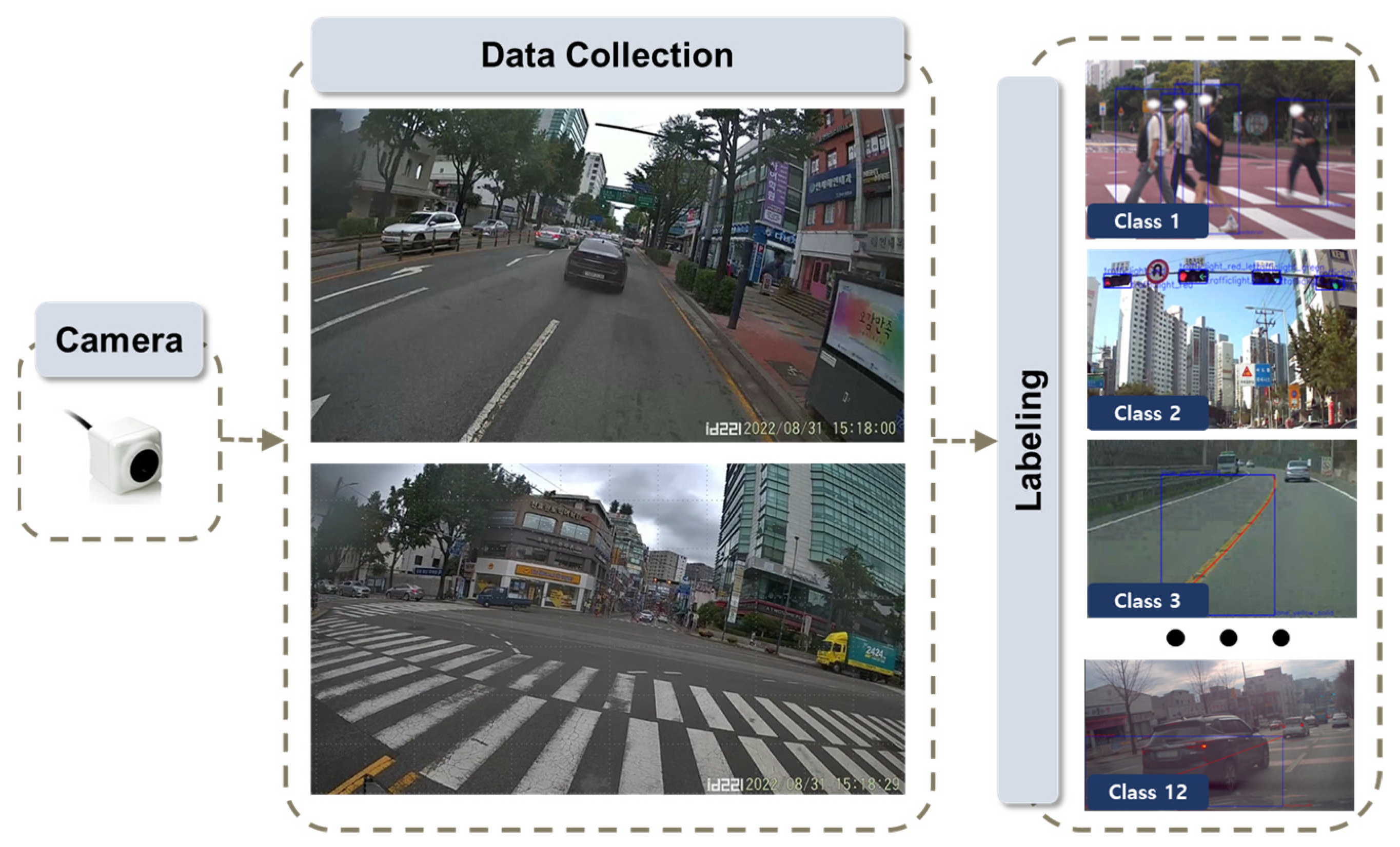
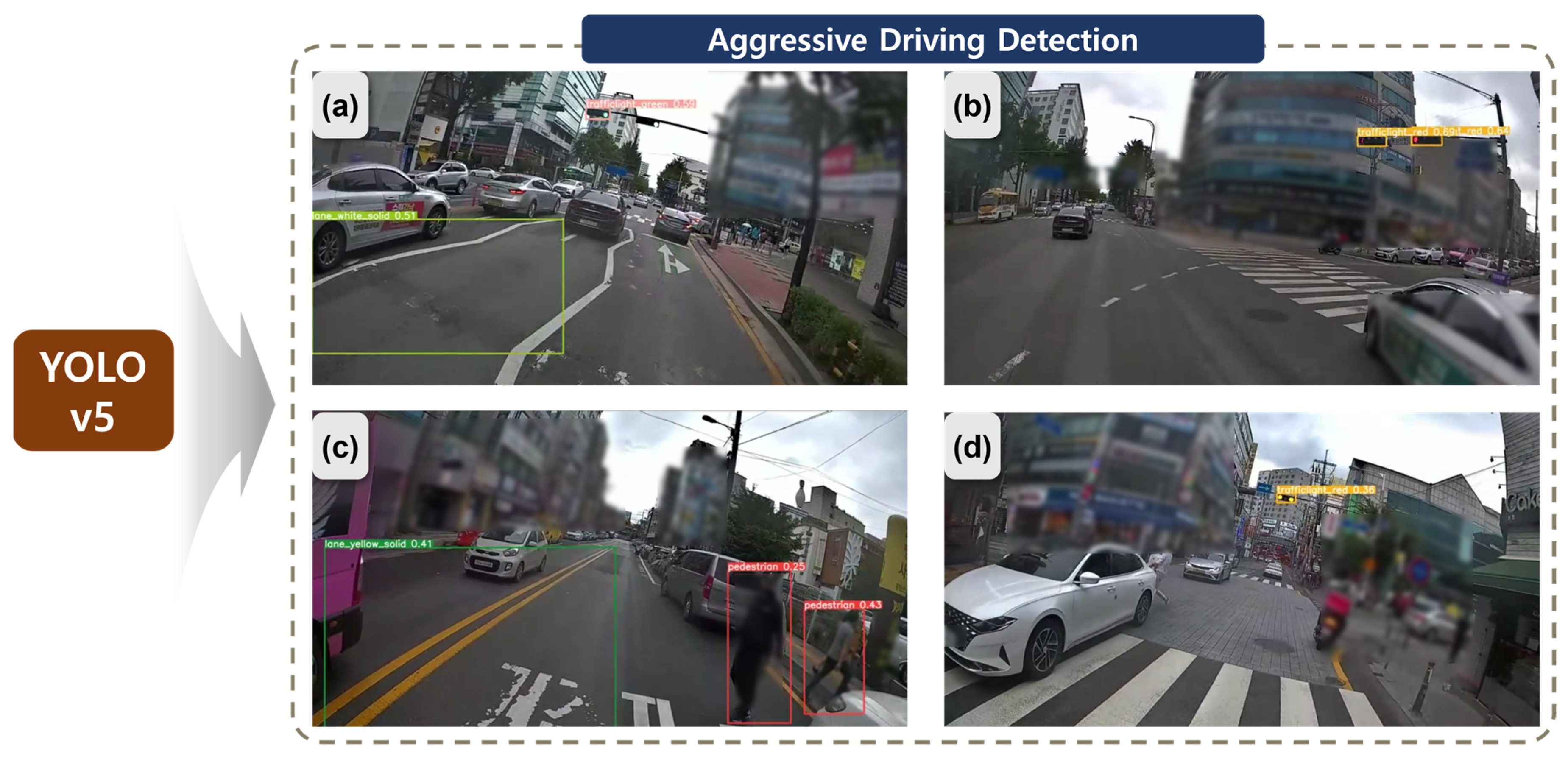
2.2.1. Image-Based Identification
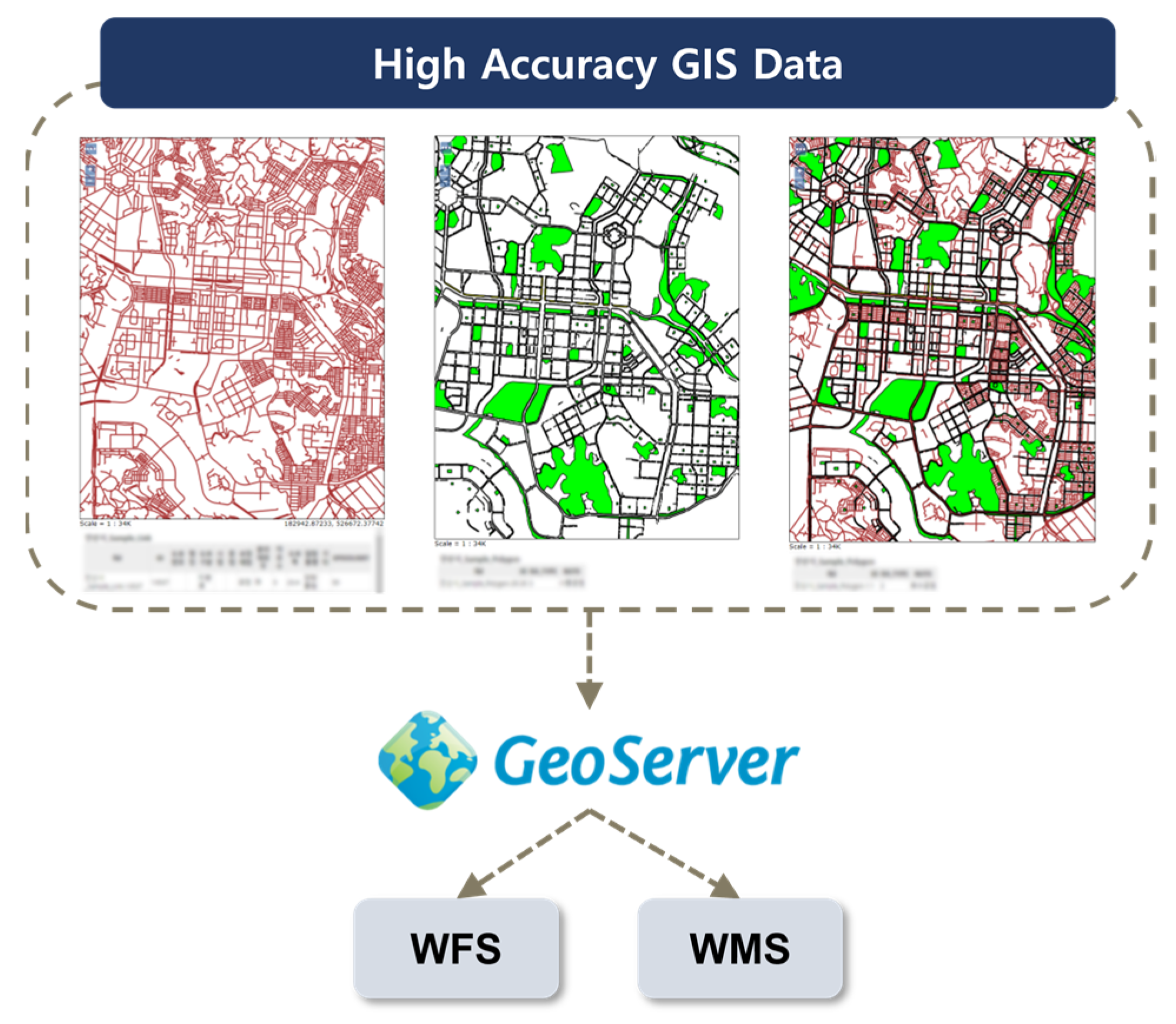
2.2.2. GIS-Based Identification
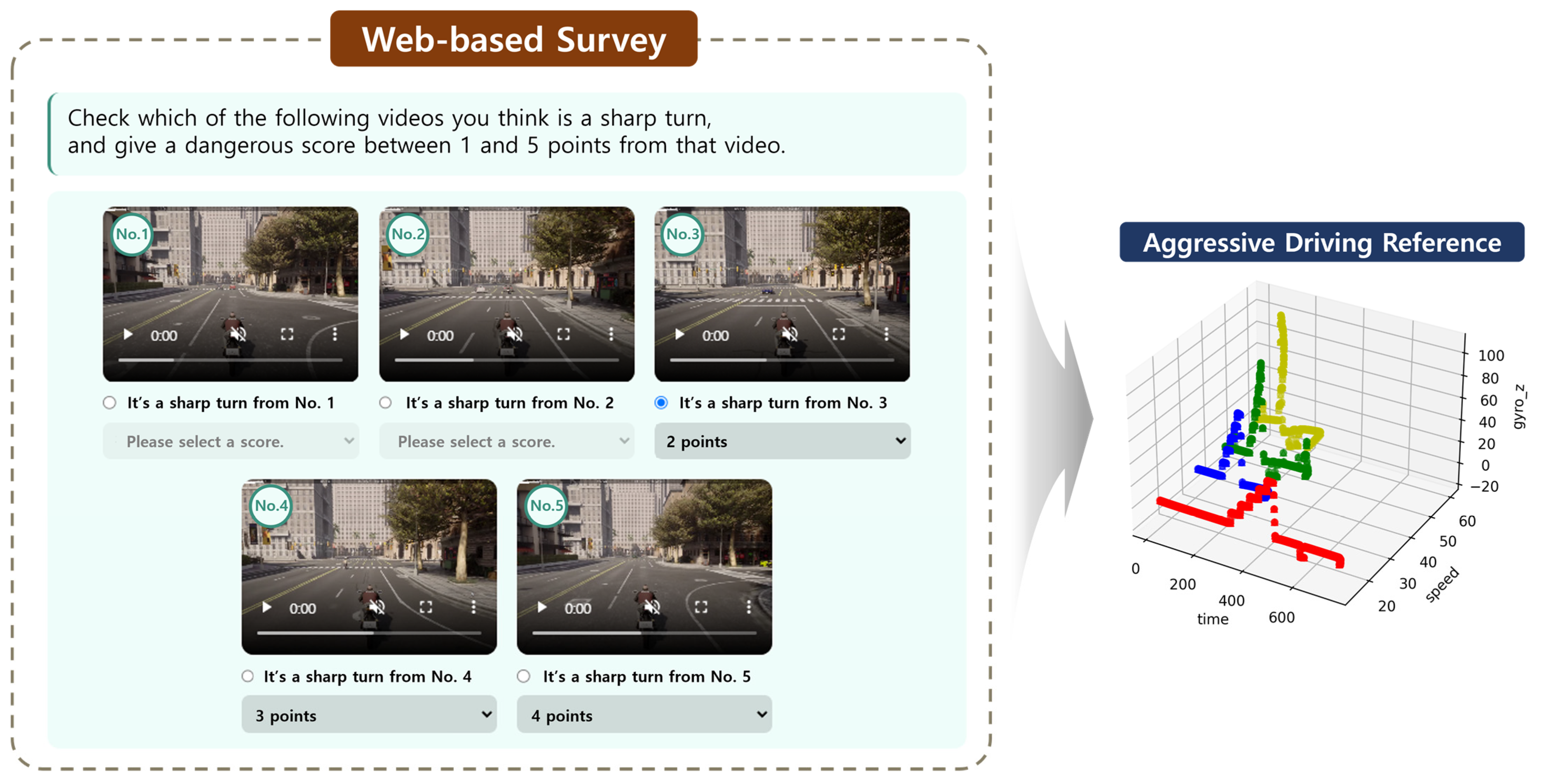
2.2.3. Inertial-Sensor-Based Identification
3. Two-Wheeled Vehicle Evaluation System
3.1. Attachment-Type Aggressive Driving Sensing Device for Two-Wheeled Vehicle
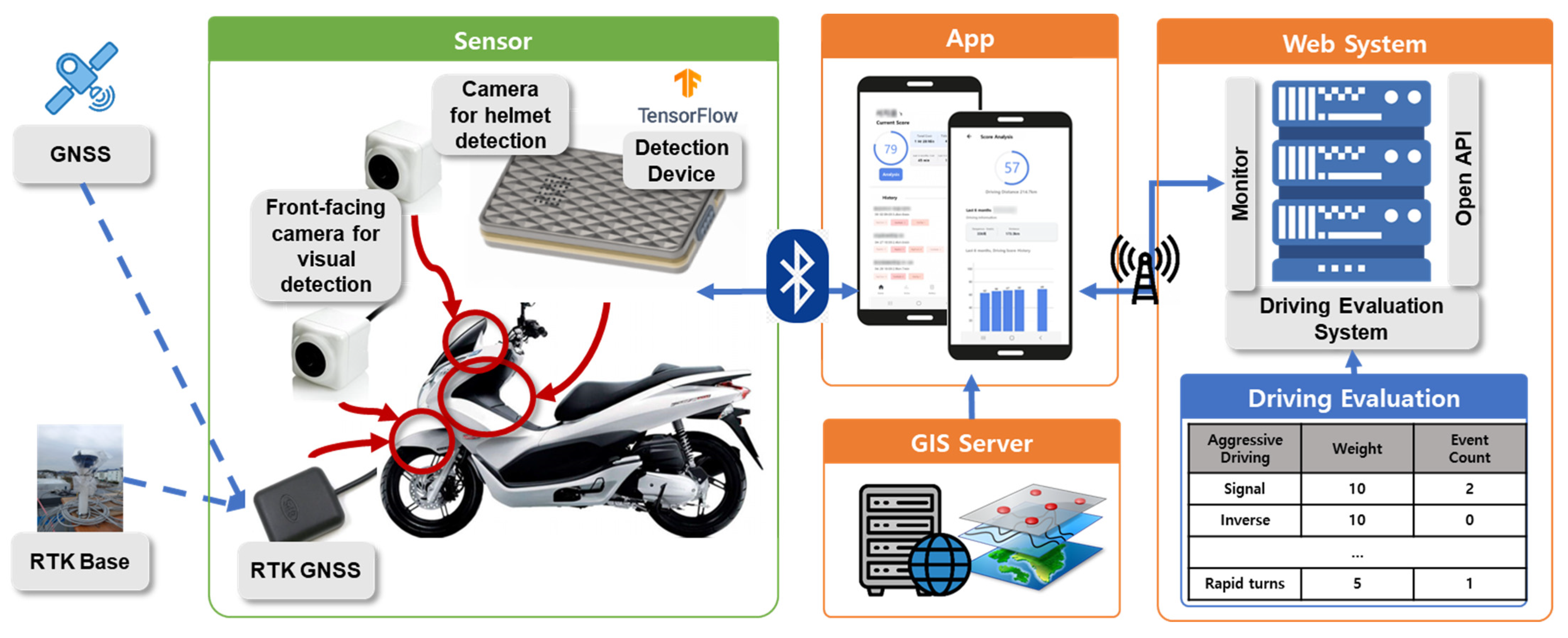
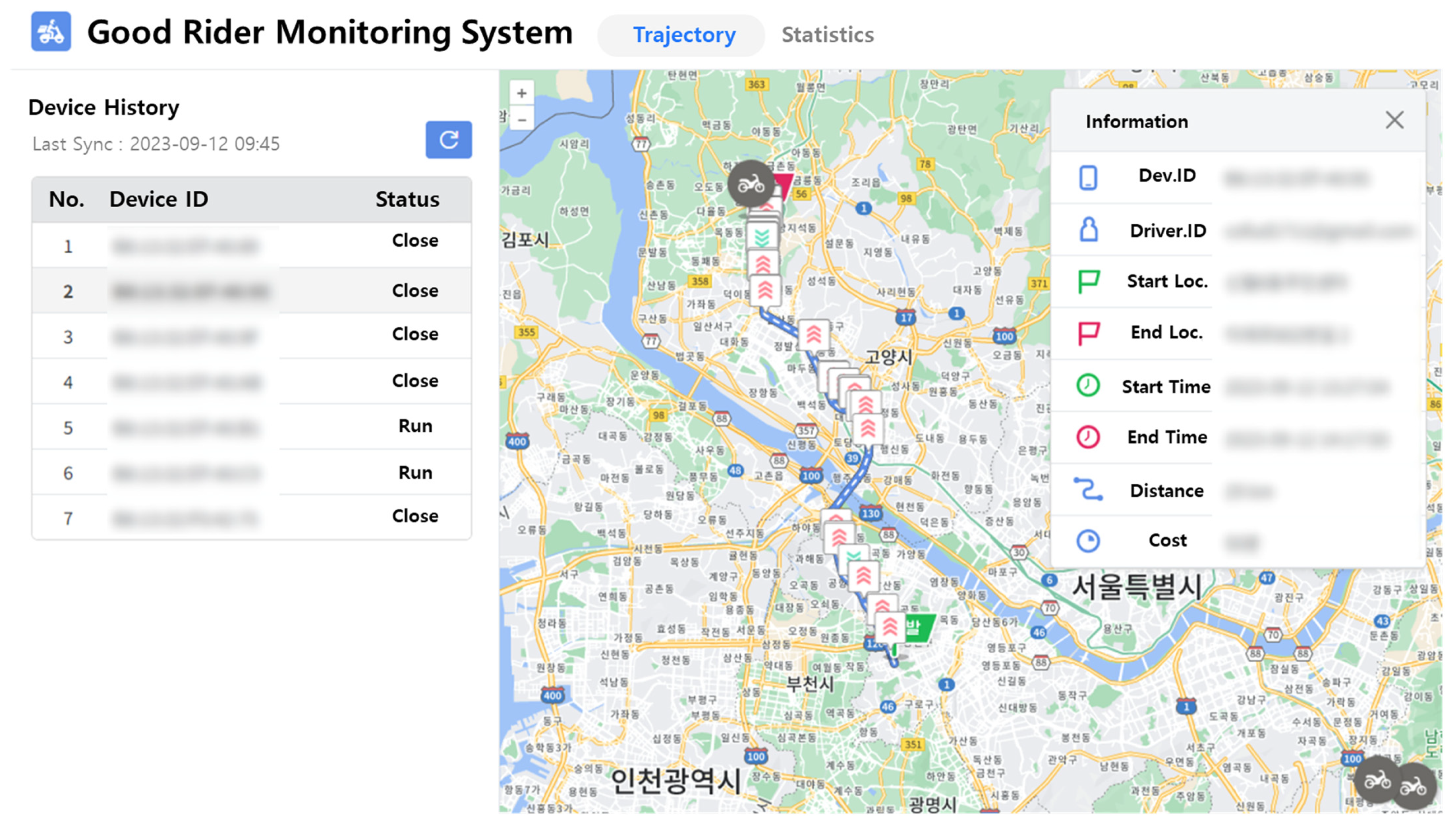
3.2. System Overview
3.2.1. Sensing Model
3.2.2. Driving Evaluation
4. Experiments/Applications
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACC | Advanced Cruise Control |
| AHD | Analog High Definition |
| AHP | Analytic Hierarchy Process |
| ARAS | Advanced Rider Assistance System |
| BLE | Bluetooth Low Energy |
| CNN | Convolution Neural Network |
| COVID-19 | Coronavirus Disease 2019 |
| CPU | Central Processing Unit |
| DTG | Digital Tachograph |
| eTAS | Electronic Traffic Assessment Score |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| HMI | Human–Machine Interface |
| HTTPS | Hypertext Transfer Protocol Secure |
| IMU | Inertial Measurement Unit |
| LED | Light Emitting Diode |
| LSTM | Long Short-Term Memory |
| OpenAPI | Open Application Programming Interface |
| RPM | Revolutions Per Minute |
| RTK | Real-Time Kinematic |
| TAAS | Traffic Accident Analysis System |
| UBI | Usage-Based Insurance |
| WFS | Web Feature Service |
| WMS | Web Map Service |
| XGBoost | Extreme Gradient Boosting |
References
- Lim, J.; Gang, H.; Lim, J.; Gang, H. A Study on the Traffic Accident Reduction Countermeasures Using the Two-Wheel Vehicle Control System. Appl. Sci. 2021, 13, 12475. [Google Scholar]
- Van Tilburg, J.; Siebert, L.C.; Cremer, J.L. MARL-iDR: Multi-Agent Reinforcement Learning for Incentive-based Residential Demand Response. arXiv 2023. [Google Scholar] [CrossRef]
- Fu, H.; Zhao, Y.; Chen, Q.; Ban, M.; Qian, X.; Sun, W.; Liu, Y.; Xu, H. Low-Carbon Incentive Guidance Strategy for Electric Vehicle Agents Based on Carbon Emission Flow. World Electr. Veh. J. 2023, 14, 327. [Google Scholar] [CrossRef]
- Stevenson, M.; Harris, A.; Mortimer, D.; Wijnands, J.S.; Tapp, A.; Peppard, F.; Buckis, S. The effects of feedback and incentive-based insurance on driving behaviours: Study approach and protocols. Inj. Prev. 2018, 24, 89–93. [Google Scholar] [CrossRef] [PubMed]
- Sagberg, F.; Ingebrigtsen, R. Effects of a penalty point system on traffic violations. Accid. Anal. Prev. 2018, 110, 71–77. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.-B.; Kim, K.-M.; Park, J.-T. Paper An empirical study for the introduction of two-wheeled vehicle control technology and behavior analysis. J. Korea Acad.—Ind. Coop. Soc. 2022, 23, 343–350. [Google Scholar] [CrossRef]
- Chiang, K.W.; Le, D.T.; Duong, T.T.; Sun, R. The Performance Analysis of INS/GNSS/V-SLAM Integration Scheme Using Smartphone Sensors for Land Vehicle Navigation Applications in GNSS-Challenging Environments. Remote Sens. 2020, 12, 1732. [Google Scholar] [CrossRef]
- Rybansky, M.; Kratochvíl, V.; Dohnal, F.; Gerold, R.; Kristalova, D.; Stodola, P.; Nohel, J. GNSS Signal Quality in Forest Stands for Off-Road Vehicle Navigation. Appl. Sci. 2023, 13, 614. [Google Scholar] [CrossRef]
- Xia, Y.; Pan, S.; Meng, X.; Gao, W.; Ye, F.; Zhao, Q.; Zhao, X. Anomaly detection for urban vehicle GNSS observation with a hybrid machine learning system. Remote Sens. 2020, 12, 971. [Google Scholar] [CrossRef]
- Berwo, M.A.; Khan, A.; Fang, Y.; Fahim, H.; Javaid, S.; Mahmood, J.; Abideen, Z.U.; M.S., S. Deep Learning Techniques for Vehicle Detection and Classification from Images/Videos: A Survey. Sensors 2023, 23, 4832. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Liao, J.; Liu, Y.; Ding, K.; Li, S.; Zhang, Z.; Cai, G.; Su, J. Knowledge-driven network for object detection. Algorithms 2021, 14, 195. [Google Scholar] [CrossRef]
- Gokul, R.; Nirmal, A.; Bharath, K.; Pranesh, M.; Karthika, R. A Comparative Study between State-of-the-Art Object Detectors for Traffic Light Detection. In Proceedings of the International Conference on Emerging Trends in Information Technology and Engineering, (ic-ETITE), Vellore, India, 24–25 February 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Franklin, R.J. Traffic Signal Violation Detection using Artificial Intelligence and Deep Learning. In Proceedings of the 2020 5th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 10–12 June 2020; pp. 839–844. [Google Scholar]
- Wang, Q.; Zhang, Q.; Liang, X.; Wang, Y.; Zhou, C.; Mikulovich, V.I. Traffic lights detection and recognition method based on the improved yolov4 algorithm. Sensors 2022, 22, 200. [Google Scholar] [CrossRef] [PubMed]
- Jalayer, M.; Zhou, H.; Zhang, B. Evaluation of navigation performances of GPS devices near interchange area pertaining to wrong-way driving. J. Traffic Transp. Eng. (Engl. Ed.) 2016, 3, 593–601. [Google Scholar] [CrossRef]
- Gagneja, K.; Singh, K.J. Wrong Lane Driving Detection using Satellite Navigation. In Proceedings of the 2020 International Conference on Emerging Trends in Information Technology and Engineering (ic-ETITE), Vellore, India, 24–25 February 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Tang, J.; Li, S.; Liu, P. A review of lane detection methods based on deep learning. Pattern Recognit. 2021, 111, 107623. [Google Scholar] [CrossRef]
- Narote, S.P.; Bhujbal, P.N.; Narote, A.S.; Dhane, D.M. A review of recent advances in lane detection and departure warning system. Pattern Recognit. 2018, 73, 216–234. [Google Scholar] [CrossRef]
- Neven, D.; De Brabandere, B.; Georgoulis, S.; Proesmans, M.; Van Gool, L. Towards End-to-End Land Detection: An Instance Segmentation Approach. In Proceedings of the 2018 IEEE intelligent vehicles symposium (IV), Suzhou, China, 26–30 June 2018. [Google Scholar]
- IMohamad, I.; Ali, M.A.M.; Ismail, M. Abnormal Driving Detection using Real Time Global Positioning System Data. In Proceedings of the 2011 International Conference on Space Science and Communication (IconSpace), Penang, Malaysia, 12–13 July 2011; pp. 1–6. [Google Scholar]
- Amin, M.S.; Jalil, J.; Reaz, M.B.I. Accident Detection and Reporting System using GPS, GPRS and GSM Technology. In Proceedings of the 2012 International Conference on Informatics, Electronics & Vision (ICIEV), Dhaka, Bangladesh, 18–19 May 2012. [Google Scholar]
- Kodali, R.K.; Sairam, M. Over Speed Monitoring System. In Proceedings of the 2016 2nd International Conference on Contemporary Computing and Informatics (IC3I), Noida, India, 14–17 December 2016; pp. 752–757. [Google Scholar]
- Dahiya, K.; Singh, D.; Mohan, C.K. Automatic Detection of Bike-riders without Helmet using Surveillance Videos in Real-time. In Proceedings of the2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 3046–3051. [Google Scholar]
- Long, X.; Cui, W.; Zheng, Z. Safety Helmet Wearing Detection Based On Deep Learning. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 5–17 March 2019; pp. 2495–2499. [Google Scholar]
- Huang, L.; Fu, Q.; He, M.; Jiang, D.; Hao, Z. Detection algorithm of safety helmet wearing based on deep learning. Concurr. Comput. Pract. Exp. 2021, 33, e6234. [Google Scholar] [CrossRef]
- Charran, R.S.; Dubey, R.K. Two-Wheeler Vehicle Traffic Violations Detection and Automated Ticketing for Indian Road Scenario. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22002–22007. [Google Scholar] [CrossRef]
- Tahboub, K.; Guera, D.; Reibman, A.R.; Delp, E.J. Quality-adaptive deep learning for pedestrian detection. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 12 July 2022; pp. 4187–4191. [Google Scholar]
- Uçar, A.; Demir, Y.; Güzeliş, C. Object recognition and detection with deep learning for autonomous driving applications. Simulation 2017, 93, 759–769. [Google Scholar] [CrossRef]
- Chen, Z.; Khemmar, R.; Decoux, B.; Atahouet, A.; Ertaud, J.-Y. Real Time Object Detection, Tracking, and Distance and Motion Estimation based on Deep Learning: Application to Smart Mobility. In Proceedings of the 2019 Eighth International Conference on Emerging Security Technologies (EST), Colchester, UK, 22 August 2019; pp. 1–6. [Google Scholar]
- Rahmaniar, W.; Hernawan, A. Real-time human detection using deep learning on embedded platforms: A Review. J. Robot. Control (JRC) 2021, 2, 462–468. [Google Scholar] [CrossRef]
- Brunetti, A.; Buongiorno, D.; Trotta, G.F.; Bevilacqua, V. Computer vision and deep learning techniques for pedestrian detection and tracking: A survey. Neurocomputing 2018, 300, 17–33. [Google Scholar] [CrossRef]
- Saha, M.; Saugstad, M.; Maddali, H.T.; Zeng, A.; Holland, R.; Bower, S.; Dash, A.; Chen, S.; Li, A.; Hara, K.; et al. Project Sidewalk: A Web-based Crowdsourcing Tool for Collecting Sidewalk Accessibility Data at Scale. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, New York, NY, USA, 4–9 May 2019; pp. 1–14. [Google Scholar] [CrossRef]
- Kang, B.; Scully, J.Y.; Stewart, O.; Hurvitz, P.M.; Moudon, A.V. Split-Match-Aggregate (SMA) algorithm: Integrating sidewalk data with transportation network data in GIS. Int. J. Geogr. Inf. Sci. 2015, 29, 440–453. [Google Scholar] [CrossRef]
- Vaiana, R.; Iuele, T.; Astarita, V.; Caruso, M.V.; Tassitani, A.; Zaffino, C.; Giofrè, V.P. Driving behavior and traffic safety: An acceleration-based safety evaluation procedure for smartphones. Mod. Appl. Sci. 2014, 8, 88–96. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Cai, B.; Liu, J. Combined alignment effects on deceleration and acceleration: A driving simulator study. Transp. Res. Part C Emerg. Technol. 2019, 104, 172–183. [Google Scholar] [CrossRef]
- Yuan, J.; Abdel-Aty, M.; Cai, Q.; Lee, J. Investigating drivers’ mandatory lane change behavior on the weaving section of freeway with managed lanes: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 11–32. [Google Scholar] [CrossRef]
- Gutiérrez-Moreno, R.; Barea, R.; López-Guillén, E.; Araluce, J.; Bergasa, L.M. Reinforcement Learning-Based Autonomous Driving at Intersections in CARLA Simulator. Sensors 2022, 22, 8373. [Google Scholar] [CrossRef] [PubMed]
- Malik, S.; Khan, M.A.; El-Sayed, H. CARLA: Car Learning to Act—An Inside Out. Procedia Comput. Sci. 2022, 198, 742–749. [Google Scholar] [CrossRef]
- Iacovella, S. GeoServer Cookbook: Boost Your Map Server’s Performance Using the Power and Flexibility of GeoServer; Packt Pub Ltd.: Birmingham, UK, 2014. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; López, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. arXiv 2017, arXiv:1711.03938. [Google Scholar]
- Jocher, G.; Stoken, A.; Borovec, J.; NanoCode012; Stan, C.; Liu, C.; Laughing; Tkianai; Hogan, A.; Lorenzomammana; et al. ultralytics/yolov5: v3.1—Bug Fixes and Performance Improvements. Zenodo 2020. [Google Scholar] [CrossRef]
- Wang, J.; Yu, L.-C.; Lai, K.R.; Zhang, X. Dimensional sentiment analysis using a regional CNN-LSTM model. In Proceedings of the 54th Annual Meeting of the Association for Computational Linguistics, (ACL), Berlin, Germany, 7–12 August 2016; pp. 225–230. [Google Scholar] [CrossRef]
- Wen, Q.; Sun, L.; Yang, F.; Song, X.; Gao, J.; Wang, X.; Xu, H. Time Series Data Augmentation for Deep Learning: A Survey. In Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence, Montreal, QC, Canada, 19–27 August 2021; pp. 4653–4660. [Google Scholar] [CrossRef]
- Gao, R.; Sun, F.; Xing, W.; Tao, D.; Fang, J.; Chai, H. CTTE: Customized travel time estimation via mobile crowdsensing. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19335–19347. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, X.; Zhang, S.; Abraham, A. A XGBoost-Based Lane Change Prediction on Time Series Data Using. Feature Engineering for Autopilot Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19187–19200. [Google Scholar] [CrossRef]
- Maceika, A.; Bugajev, A.; Šostak, O.R.; Vilutienė, T. Decision tree and ahp methods application for projects assessment: A case study. Sustainability 2021, 13, 5502. [Google Scholar] [CrossRef]
- Pant, S.; Kumar, A.; Ram, M.; Klochkov, Y.; Sharma, H.K. Consistency Indices in Analytic Hierarchy Process: A Review. Mathematics 2022, 10, 1206. [Google Scholar] [CrossRef]
- Hangguan, Q.; Fu, T.; Wang, J.; Luo, T.; Fang, S. An integrated methodology for real-time driving risk status prediction using naturalistic driving data. Accid. Anal. Prev. 2021, 156, 106122. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Lee, H. Motorcycle Accident Analysis and Traffic Safety Improvement Plan. Republic of Korea; Korea Transportation Research Institute: Sejong City, Republic of Korea, 2021. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Criteria | Sub-Criteria | Results of Two-Wheeled Vehicle Traffic Accident Type Analysis | |
|---|---|---|---|
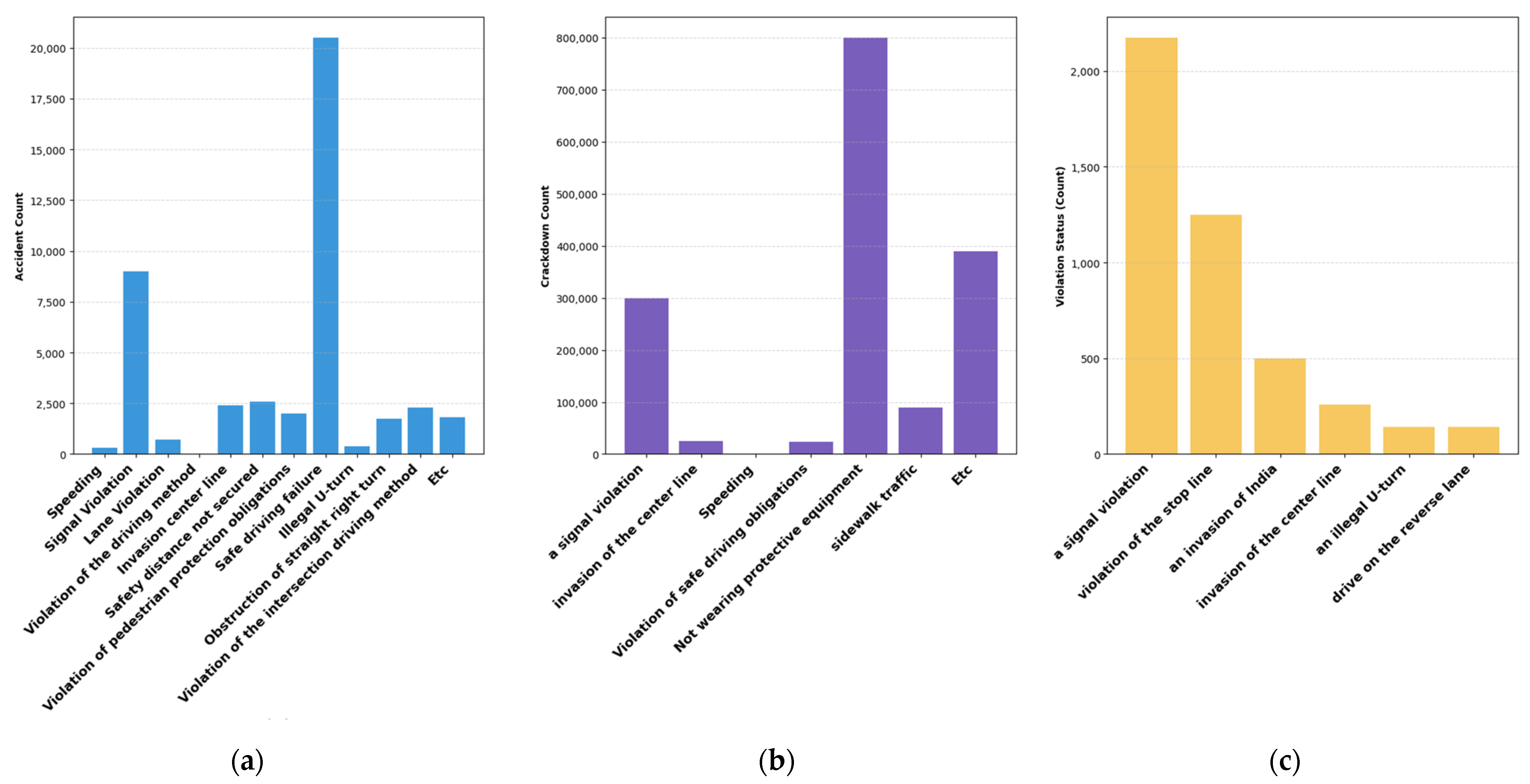
| 1 | Traffic Violations | Signal Violation | Based on 2017–2021 data for motorcycle accidents in Seoul, Incheon, and Gyeonggi, signal violations account for approximately 23.8% of all accidents. In a survey conducted by the Korea Road Traffic Safety Corporation on signal violation among motorcycles on the roads of Seoul, it constitutes about 48.8% of all violation cases. |
| 2 | Reverse Lane Driving | In a survey conducted by the Korea Road Traffic Safety Corporation on wrong-way driving among motorcycles on the roads of Seoul, it constitutes about 3.1% of all violation cases. | |
| 3 | Central Line Violation | Based on 2017–2021 data for motorcycle accidents in Seoul, Incheon, and Gyeonggi, crossing the centerline accounts for approximately 5% of all accidents. In a survey conducted by the Korea Road Traffic Safety Corporation on crossing the centerline among motorcycles on the roads of Seoul, it constitutes about 5.8% of all violation cases. | |
| 4 | Speed Violation | In a study of the fatality rates for different types of motorcycle accidents, including speeding, crossing the centerline, and signal violation, speeding exhibits the highest fatality rate at 22.2%. | |
| 5 | Helmet Non-Usage | According to the 2017–2021 data from the Korean National Police Agency, failure to wear protective headgear, such as helmets, accounts for approximately 50% (around 800,000 cases) of all violations. Among the causes of motorcycle accident-related fatalities, head injuries rank first at a dominant 67.1%. | |
| 6 | Pedestrian Threat | Proximity to Pedestrians | Based on 2017–2021 data for motorcycle accidents in Seoul, Incheon, and Gyeonggi, cases involving pedestrians as victims constitute about 18% of all accidents (compared to about 48% for passenger vehicles). |
| 7 | Riding on Sidewalks | According to the 2017–2021 data from the Korean National Police Agency, cases of motorcycles riding on sidewalks account for approximately 5% of all violations. In a survey conducted by the Korea Road Traffic Safety Corporation on motorcycles riding on sidewalks in Seoul, it constitutes about 11.2% of all violation cases. | |
| 8 | Reckless Driving | Rapid Acceleration | Motorcycles exhibit significantly higher acceleration per unit weight compared to standard vehicles. |
| 9 | Rapid Deceleration | Jackknife effect: In cases of motorcycles or vehicles with a short wheelbase, abrupt braking leads to a shift in weight towards the front, causing the rear wheel to lift and skid. | |
| 10 | Rapid Turns | According to the Traffic Accident Analysis System (TAAS), over half of the 4035 motorcycle accidents in Seoul in 2021 occurred at intersections. | |
| 11 | Rapid Lane Changes | The Traffic Accident Analysis System (TAAS) defines lane violations, improper lane usage, overtaking violations, and obstructing straight or right turns as motorcycle accident types. |
| Main Criteria | Sub-Criteria | Method | References | |
|---|---|---|---|---|
| 1 | Traffic Violations | Signal violation | Based on Images | [12,13,14] |
| 2 | Reverse lane driving | Based on GIS | [15,16] | |
| 3 | Central line violation | Based on GIS | [17,18,19] | |
| 4 | Speed violation | Based on GIS | [20,21,22] | |
| 5 | Helmet non-usage | Based on Images | [23,24,25,26] | |
| 6 | Pedestrian Threat | Proximity to pedestrians | Based on Images | [27,28,29,30,31] |
| 7 | Riding on sidewalks | Based on Images/GIS | [32,33] | |
| 8 | Reckless Driving | Rapid acceleration | Based on Inertial Sensor | [34,35,36,37,38] |
| 9 | Rapid deceleration | Based on Inertial Sensor | ||
| 10 | Rapid turns | Based on Inertial Sensor | ||
| 11 | Rapid lane changes | Based on Inertial Sensor |
| Main Criteria | Sub-Criteria | Weight | |
|---|---|---|---|
| 1 | Traffic Violations | Signal violation | 0.082 |
| 2 | Reverse lane driving | 0.060 | |
| 3 | Central line violation | 0.096 | |
| 4 | Speed violation | 0.124 | |
| 5 | Helmet non-usage | 0.158 | |
| 6 | Pedestrian Threat | Proximity to pedestrians | 0.122 |
| 7 | Riding on sidewalks | 0.078 | |
| 8 | Reckless Driving | Rapid acceleration | 0.098 |
| 9 | Rapid deceleration | 0.098 | |
| 10 | Rapid turns | 0.044 | |
| 11 | Rapid lane changes | 0.040 |
| Cost (Time) 1 | Cost (Distance) | Score | Aggressive Driving Event 2 | ||||
|---|---|---|---|---|---|---|---|
| Normal | Acc. | Dcc. | Turn. | ||||
| Ped. | Sig. | Speed. | Helmet. | ||||
| User A | 3 day. 15 h. | 1544.330 km | 83.237 | 79.350% | 0.460% | 0.090% | 0.248% |
| 0.465% | 0.002% | 19.384% | |||||
| User B | 12 day. 7 h. | 4485.452 km | 85.21 | 78.653% | 1.383% | 0.233% | 0.178% |
| 0.036% | 0.003% | 19.513% | 0.001% | ||||
| User C | 2 day. 2 h. | 1008.265 km | 84.44 | 82.141% | 1.245% | 0.244% | 0.356% |
| 0.002% | 16.013% | ||||||
| User D | 6 day. 2 h. | 2215.477 km | 99.985 | 81.269% | 0.603% | 0.103% | 0.083% |
| 17.953% | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Kim, H.; Lee, S.; Lee, Q.; Lee, M.; Lee, J.; Jun, C. Design and Implementation of a Two-Wheeled Vehicle Safe Driving Evaluation System. Sensors 2024, 24, 4739. https://doi.org/10.3390/s24144739
Kim D, Kim H, Lee S, Lee Q, Lee M, Lee J, Jun C. Design and Implementation of a Two-Wheeled Vehicle Safe Driving Evaluation System. Sensors. 2024; 24(14):4739. https://doi.org/10.3390/s24144739
Chicago/Turabian StyleKim, Dongbeom, Hyemin Kim, Suyun Lee, Qyoung Lee, Minwoo Lee, Jooyoung Lee, and Chulmin Jun. 2024. "Design and Implementation of a Two-Wheeled Vehicle Safe Driving Evaluation System" Sensors 24, no. 14: 4739. https://doi.org/10.3390/s24144739
APA StyleKim, D., Kim, H., Lee, S., Lee, Q., Lee, M., Lee, J., & Jun, C. (2024). Design and Implementation of a Two-Wheeled Vehicle Safe Driving Evaluation System. Sensors, 24(14), 4739. https://doi.org/10.3390/s24144739