

A Real-Time Adaptive Station Beamforming Strategy for Next Generation Phased Array Radio Telescopes

Abstract
1. Introduction
2. Adaptive Beamforming Strategy
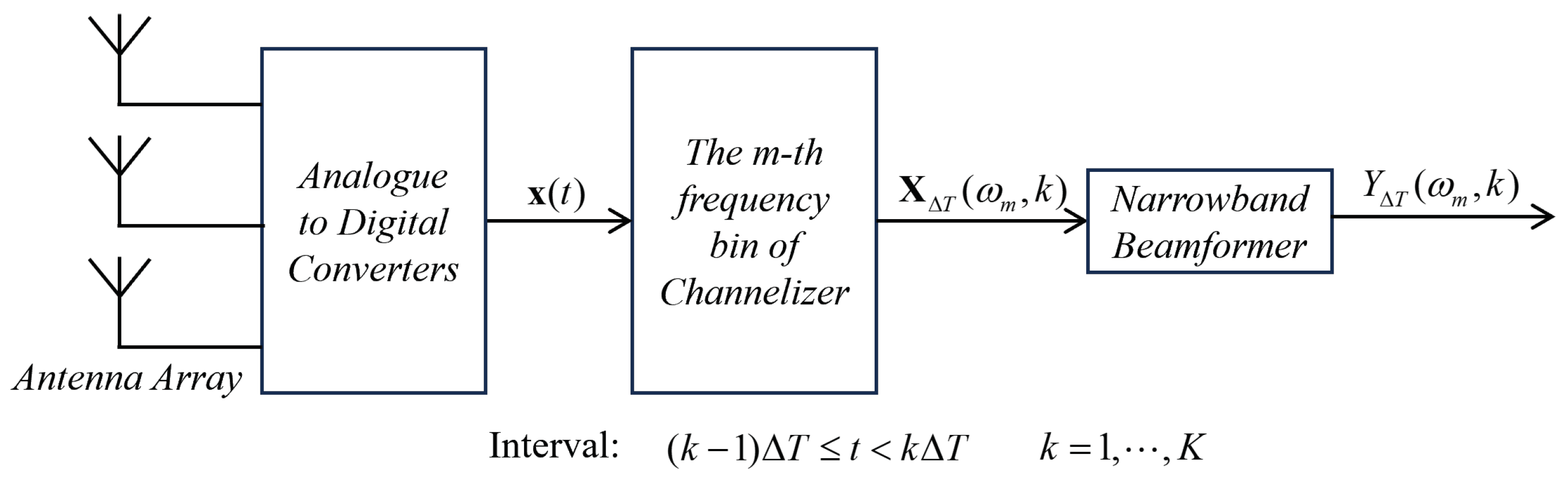
2.1. Data Model
2.2. Linear Constrained Minimum Power Beamformer
- The astronomical signal usually has a signal-to-noise ratio (SNR) of −20 dB or less, so , where and are the spectral matrices of astronomical source and noise, respectively [31];
- Harmful strong interference may has a interference-to-noise ratio (INR) range from 0 dB up to 40 dB, which is therefore much stronger than astronomical signal;
- are initially unknown, because SKA-low antenna element has a wide-open field of view and is susceptible to a variety of RFIs;
2.3. Least Mean Square Implementation
2.4. Parallel Least Mean Square Algorithm
| Algorithm 1 algorithm of PLMS beamformer |
| Input: , , |
| Output: , , |
|
2.5. Computational Complexity
3. Description of the SKA-Low Station
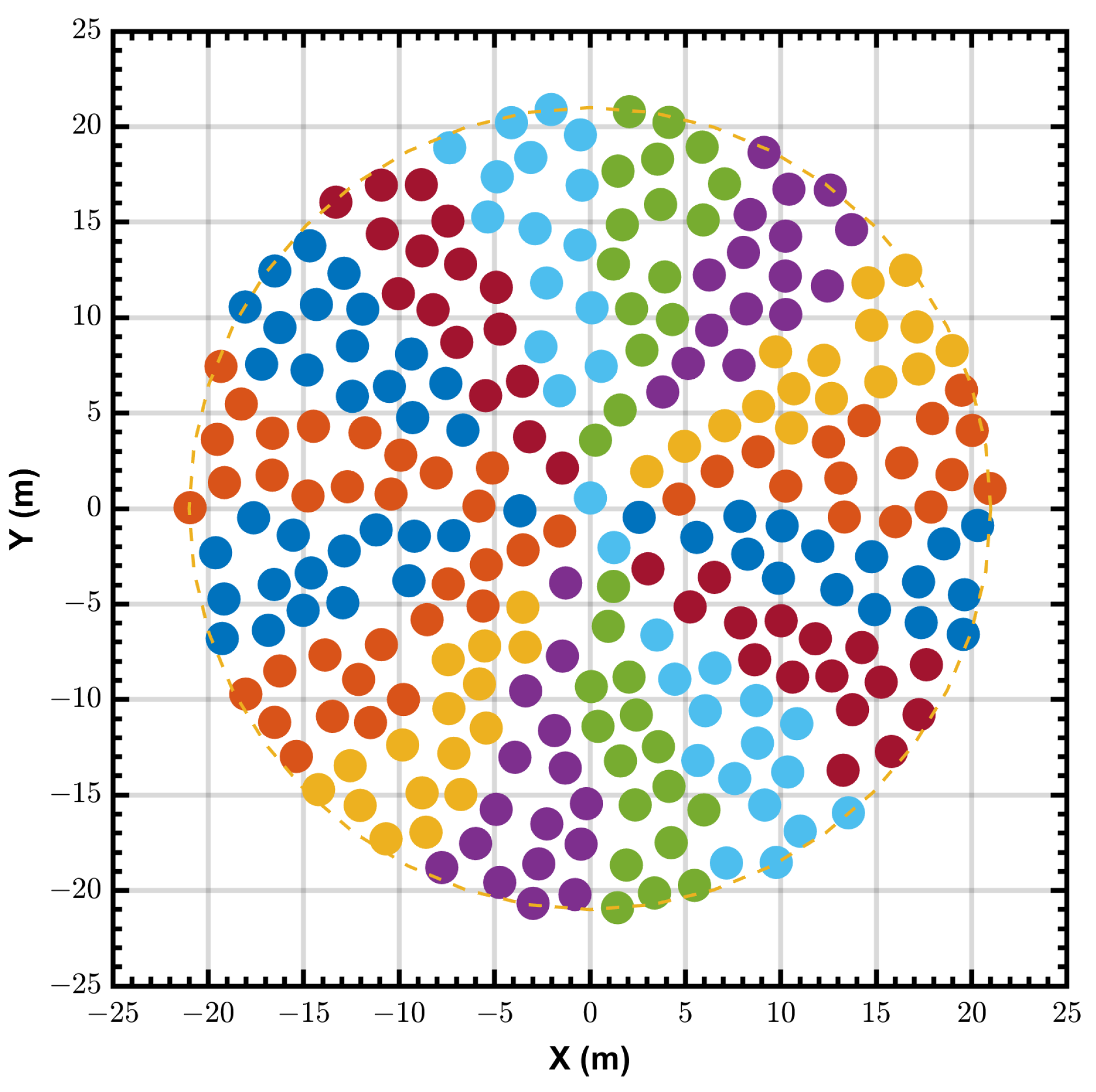
3.1. Station Layout
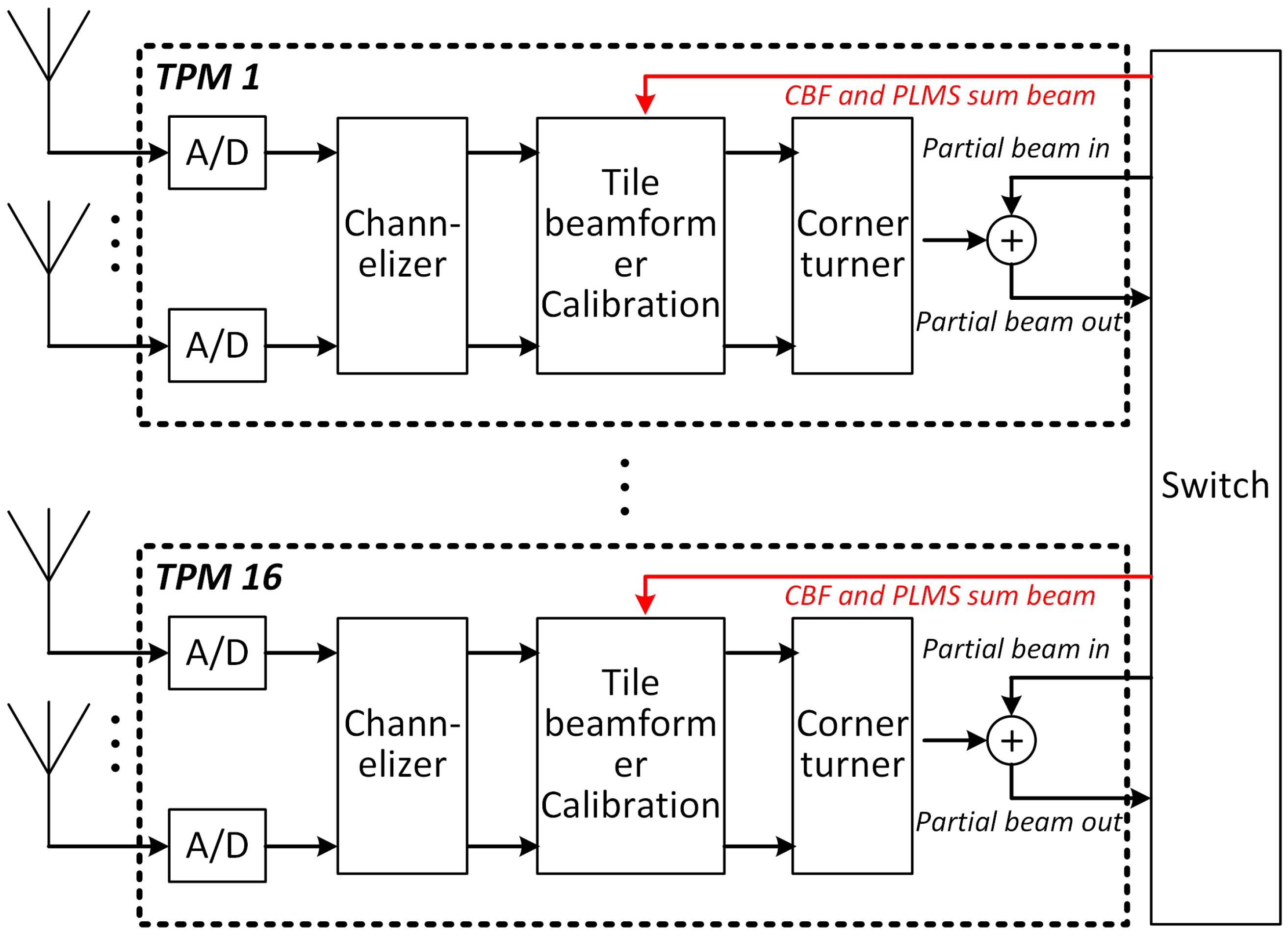
3.2. Station Signal Processing
4. Numerical and Experimental Results
4.1. Simulation Details
4.2. Performance Metrics
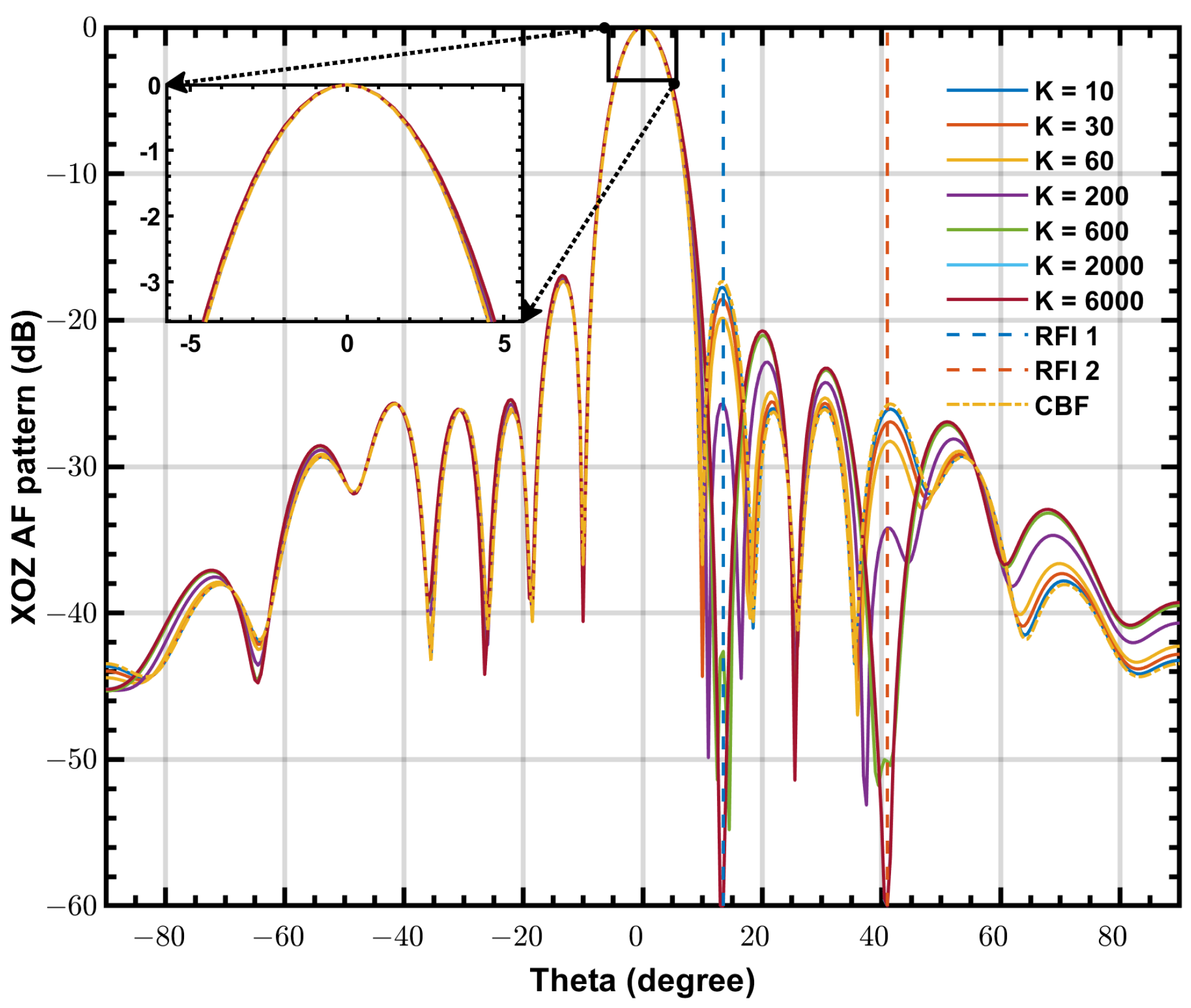
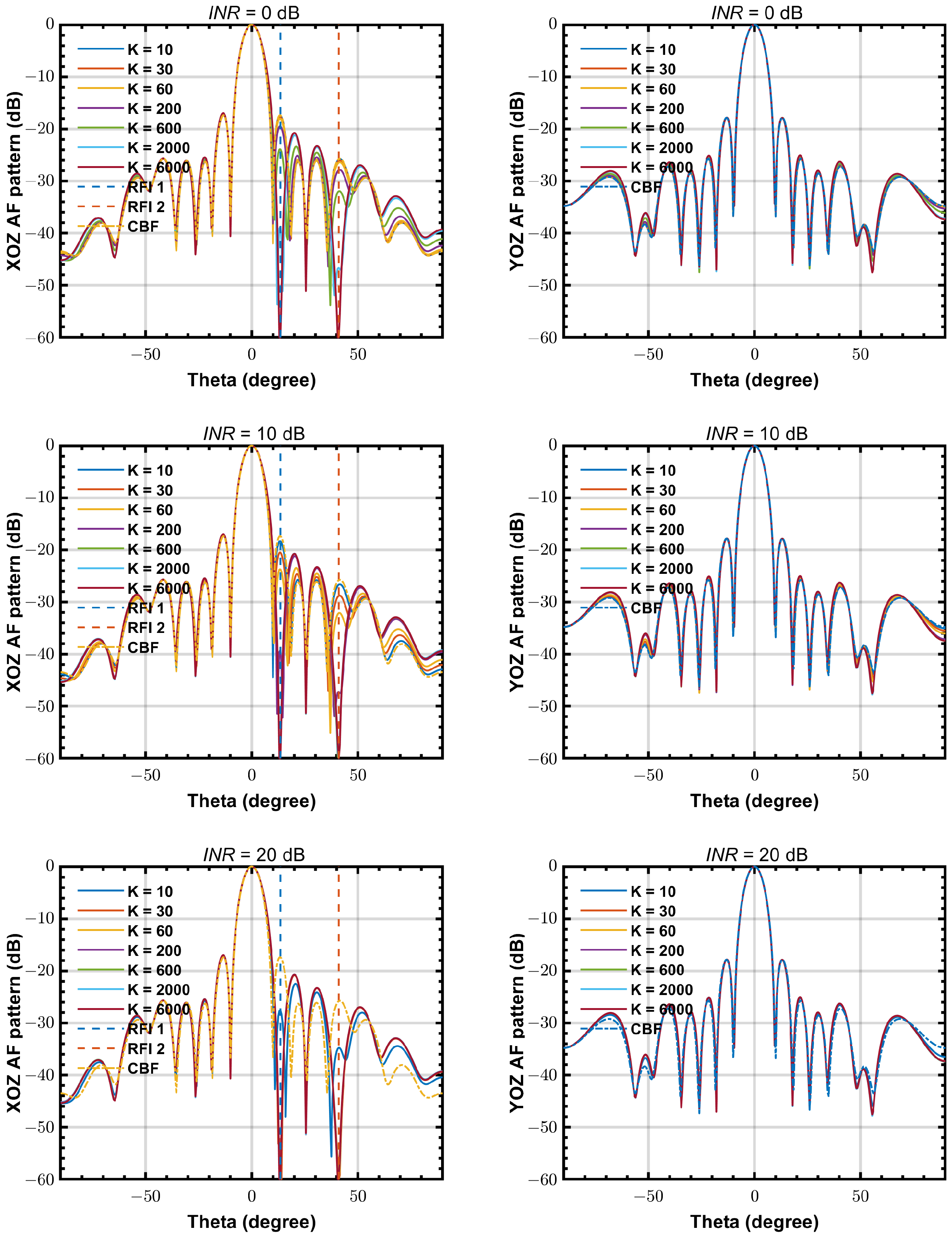
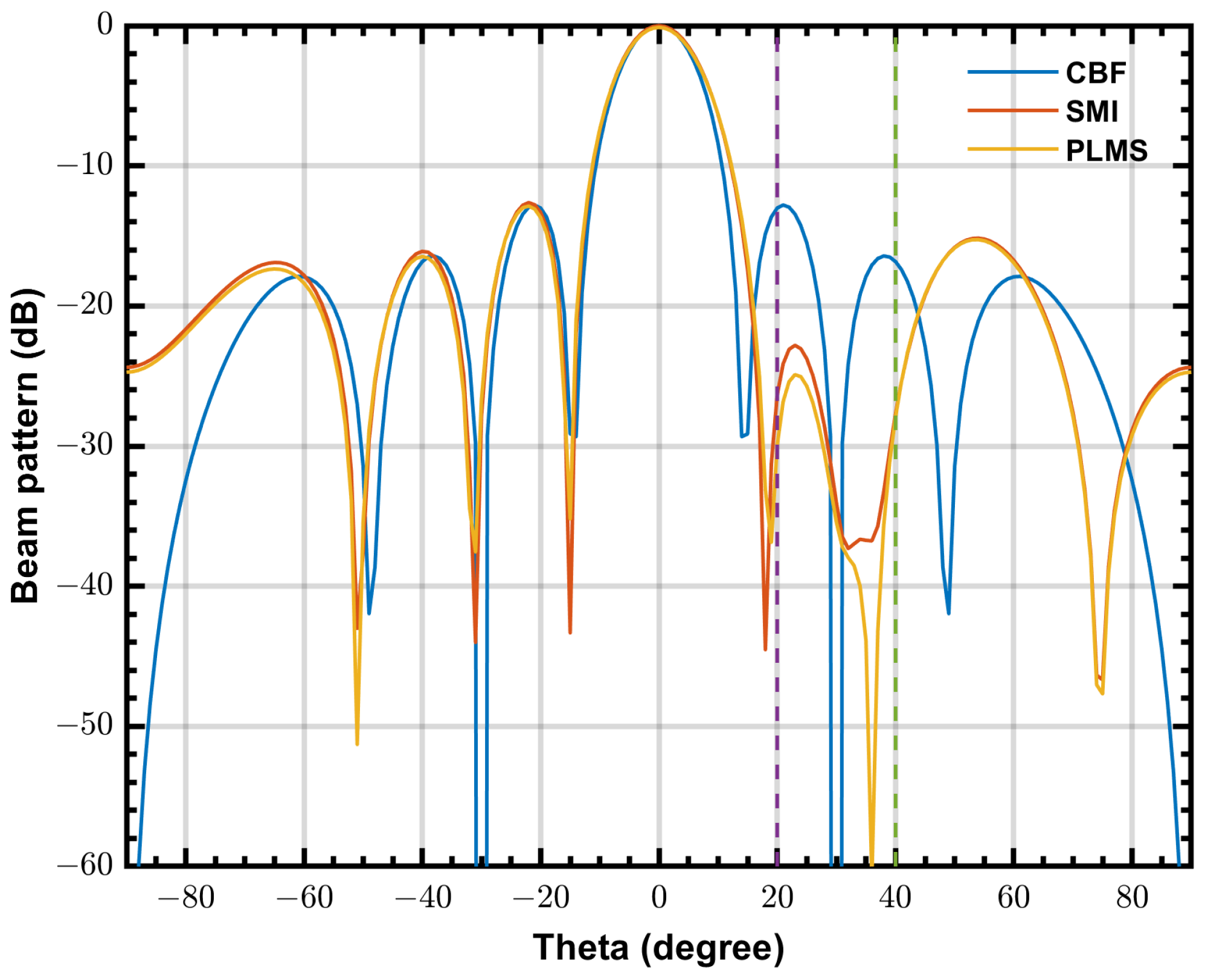
4.3. Simulated Beam Patterns
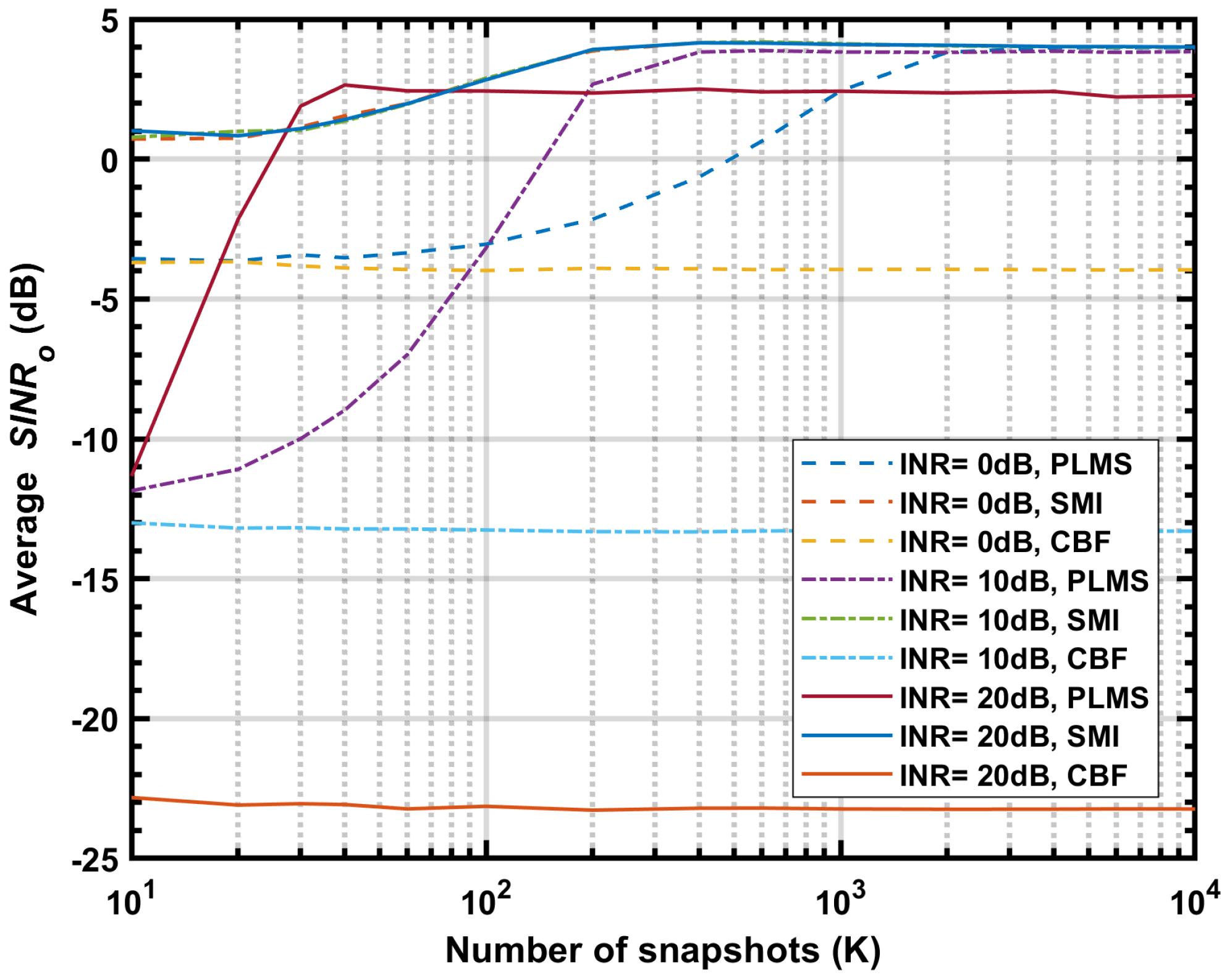
4.4. Simulated Output SINR
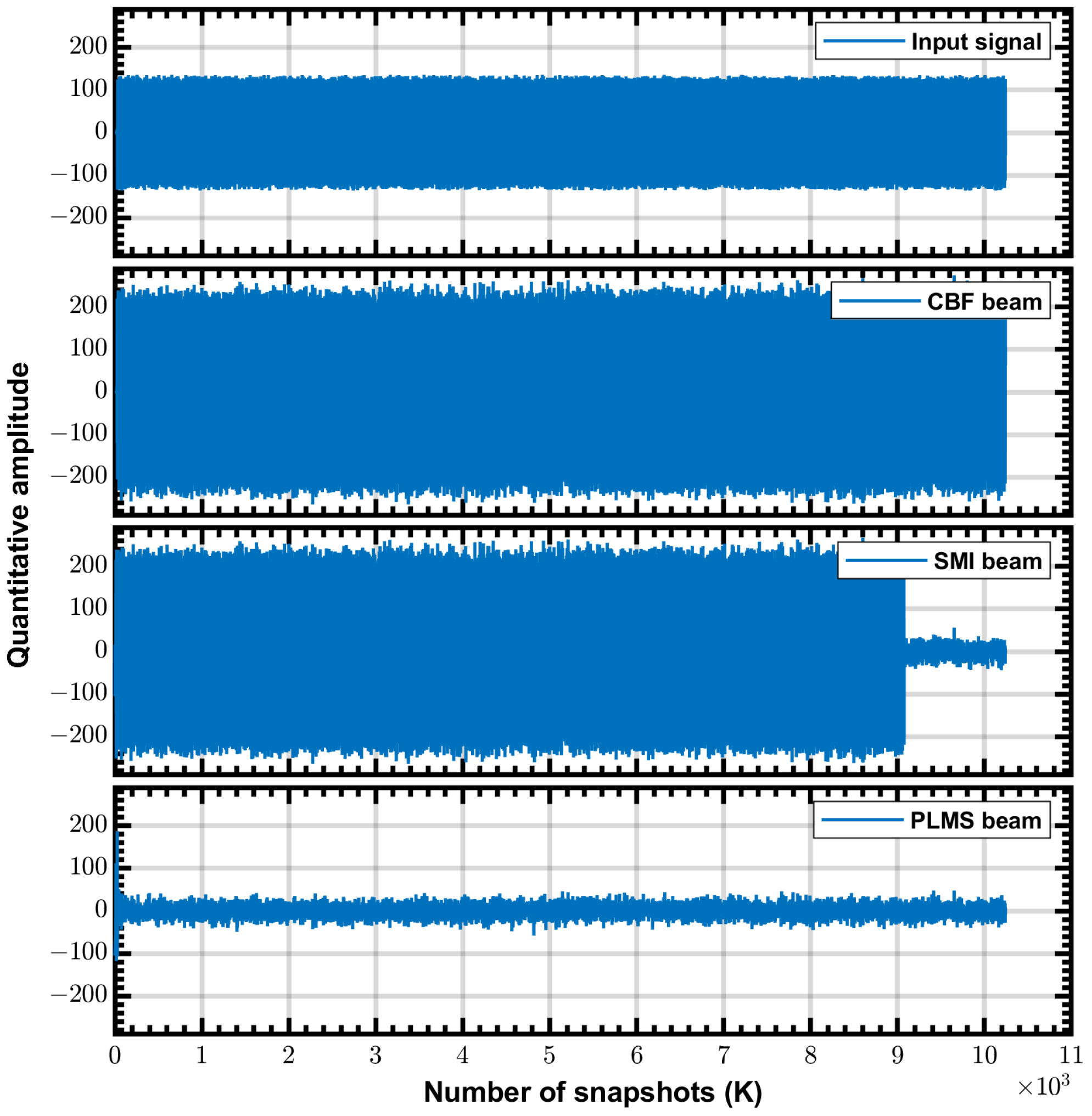
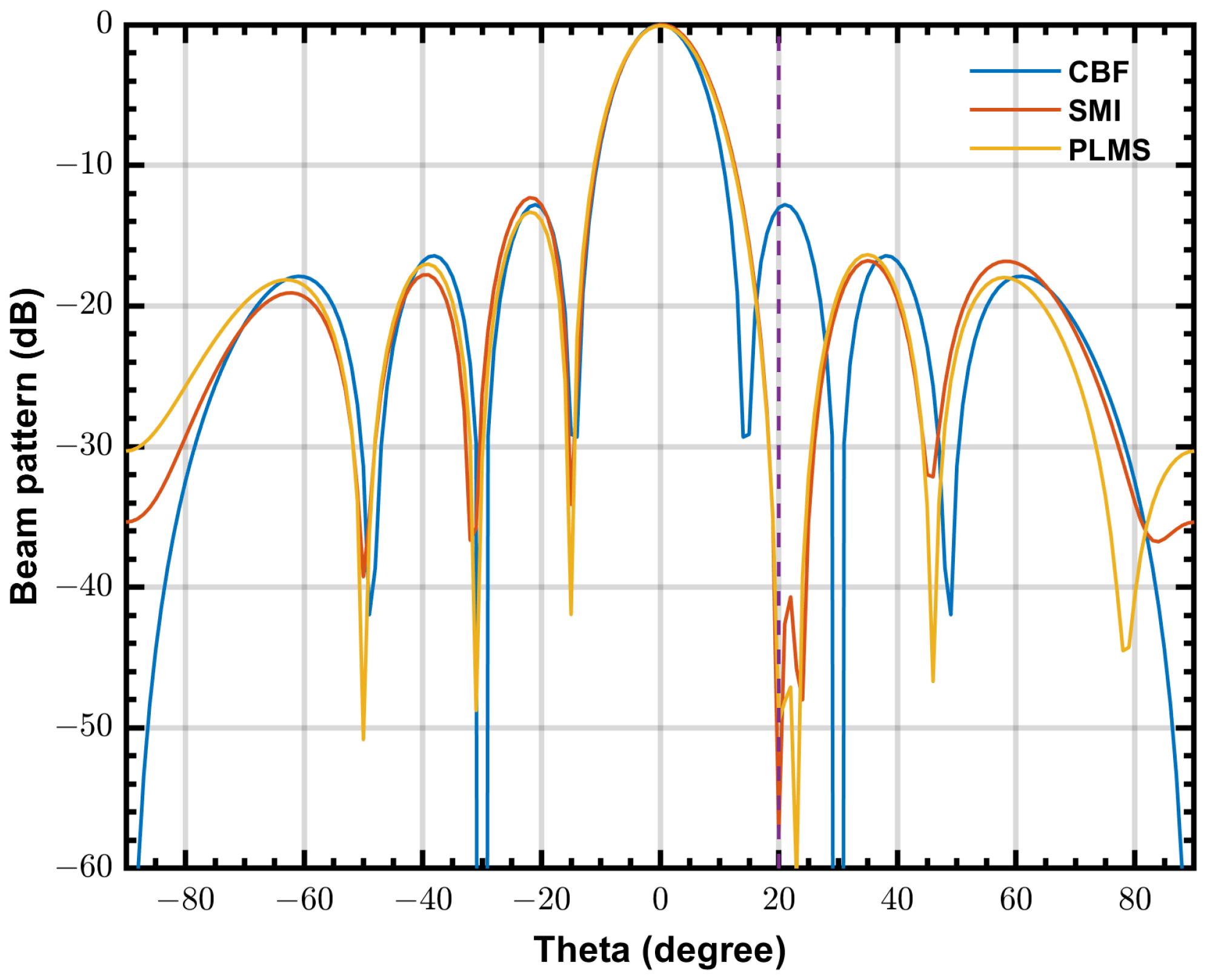
4.5. FPGA Implementation Demonstration
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dewdney, P.E.; Hall, P.J.; Schilizzi, R.T.; Lazio, T.J.L.W. The Square Kilometre Array. Proc. IEEE 2009, 97, 1482–1496. [Google Scholar] [CrossRef]
- Van Haarlem, M.P.; Wise, M.W.; Gunst, A.W.; Heald, G.; McKean, J.P.; Hessels, J.W.T.; de Bruyn, A.G.; Nijboer, R.; Swinbank, J.; Fallows, R.; et al. LOFAR: The LOw-Frequency ARray. Astron. Astrophys. 2013, 556, A2. [Google Scholar] [CrossRef]
- Ellingson, S.; Clarke, T.; Cohen, A.; Craig, J.; Kassim, N.; Pihlström, Y.; Rickard, L.; Taylor, G. The Long Wavelength Array. Proc. IEEE 2009, 97, 1421–1430. [Google Scholar] [CrossRef]
- Lonsdale, C.J.; Cappallo, R.J.; Morales, M.F.; Briggs, F.H.; Benkevitch, L.; Bowman, J.D.; Bunton, J.D.; Burns, S.; Corey, B.E.; de Souza, L.; et al. The Murchison Widefield Array: Design Overview. Proc. IEEE 2009, 97, 1497–1506. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, X.P.; Zheng, Q.; Gu, J.H.; Xu, H. The Radio Environment of the 21 Centimeter Array: RFI Detection and Mitigation. Res. Astron. Astrophys. 2016, 16, 36. [Google Scholar] [CrossRef]
- Labate, M.G.; Waterson, M.; Alachkar, B.; Hendre, A.; Lewis, P.; Bartolini, M.; Dewdney, P. Highlights of the Square Kilometre Array Low Frequency (SKA-LOW) Telescope. J. Astron. Telesc. Instrum. Syst. 2022, 8, 011024. [Google Scholar] [CrossRef]
- Bolli, P.; Mezzadrelli, L.; Monari, J.; Perini, F.; Tibaldi, A.; Virone, G.; Bercigli, M.; Ciorba, L.; Di Ninni, P.; Labate, M.G.; et al. Test-Driven Design of an Active Dual-Polarized Log-Periodic Antenna for the Square Kilometre Array. IEEE Open J. Antennas Propag. 2020, 1, 253–263. [Google Scholar] [CrossRef]
- Offringa, A.R.; Wayth, R.B.; Hurley-Walker, N.; Kaplan, D.L.; Barry, N.; Beardsley, A.P.; Bell, M.E.; Bernardi, G.; Bowman, J.D.; Briggs, F.; et al. The Low-Frequency Environment of the Murchison Widefield Array: Radio-Frequency Interference Analysis and Mitigation. Publ. Astron. Soc. Aust. 2015, 32, e008. [Google Scholar] [CrossRef]
- Fridman, P.A.; Baan, W.A. RFI Mitigation Methods in Radio Astronomy. Astron. Astrophys. 2001, 378, 327–344. [Google Scholar] [CrossRef]
- Comoretto, G.; Chiello, R.; Roberts, M.; Halsall, R.; Adami, K.Z.; Alderighi, M.; Aminaei, A.; Baker, J.; Belli, C.; Chiarucci, S.; et al. The Signal Processing Firmware for the Low Frequency Aperture Array. J. Astron. Instrum. 2017, 6, 1641015. [Google Scholar] [CrossRef]
- Leshem, A.; van der Veen, A.J.; Boonstra, A.J. Multichannel Interference Mitigation Techniques in Radio Astronomy. Astrophys. J. Suppl. Ser. 2000, 131, 355–373. [Google Scholar] [CrossRef]
- Jeffs, B.; Li, L.; Warnick, K. Auxiliary Antenna-Assisted Interference Mitigation for Radio Astronomy Arrays. IEEE Trans. Signal Process. 2005, 53, 439–451. [Google Scholar] [CrossRef]
- Kocz, J.; Briggs, F.H.; Reynolds, J. Radio Frequency Interference Removal Through The Application Of Spatial Filtering Techniques On The Parkes Multibeam Receiver. Astron. J. 2010, 140, 2086–2094. [Google Scholar] [CrossRef]
- Baan, W.A. Implementing RFI Mitigation in Radio Science. J. Astron. Instrum. 2019, 8, 1940010. [Google Scholar] [CrossRef]
- Ruzindana, M. Real-Time Beamforming Algorithms for the Focal L-Band Array on the Green Bank Telescope. Master’s Thesis, Brigham Young University, Provo, UT, USA, 2017. [Google Scholar]
- Yu, S.J.; Lee, J.H. Adaptive Array Beamforming Based on an Efficient Technique. IEEE Trans. Antennas Propag. 1996, 44, 1094–1101. [Google Scholar] [CrossRef]
- Zaharov, V.V.; Teixeira, M. SMI-MVDR Beamformer Implementations for Large Antenna Array and Small Sample Size. IEEE Trans. Circuits Syst. Regul. Pap. 2008, 55, 3317–3327. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust Adaptive Beamforming Based on Interference Covariance Matrix Reconstruction and Steering Vector Estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar] [CrossRef]
- Rosado-Sanz, J.; Jarabo-Amores, M.P.; De la Mata-Moya, D.; Rey-Maestre, N. Adaptive Beamforming Approaches to Improve Passive Radar Performance in Sea and Wind Farms’ Clutter. Sensors 2022, 22, 6865. [Google Scholar] [CrossRef] [PubMed]
- Van Trees, H.L. Adaptive Beamformers. In Optimum Array Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002; Chapter 7; pp. 710–916. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, D. Low-Complexity Adaptive Beamforming Algorithm With High Dimensional and Small Samples. IEEE Sens. J. 2023, 23, 15675–15688. [Google Scholar] [CrossRef]
- D, V.; Jalal, B. A Fast Adaptive Beamforming Technique for Efficient Direction-of-Arrival Estimation. IEEE Sens. J. 2022, 22, 23109–23116. [Google Scholar] [CrossRef]
- Linh-Trung, N.; Nguyen, V.D.; Thameri, M.; Minh-Chinh, T.; Abed-Meraim, K. Low-Complexity Adaptive Algorithms for Robust Subspace Tracking. IEEE J. Sel. Top. Signal Process. 2018, 12, 1197–1212. [Google Scholar] [CrossRef]
- Huang, F.; Sheng, W.; Ma, X.; Wang, W. Robust Adaptive Beamforming for Large-Scale Arrays. Signal Process. 2010, 90, 165–172. [Google Scholar] [CrossRef]
- Van Veen, B.; Roberts, R. Partially Adaptive Beamformer Design via Output Power Minimization. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1524–1532. [Google Scholar] [CrossRef]
- Gaonach, G.; Gehant, M. Adaptive Subarrays Beamforming. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, X.; Wei, Y. Adaptive Beamforming Technique for Large-Scale Arrays with Various Subarray Selections. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, W.; Sheng, W.X.; Qi, B.Y. Subarray Adaptive Array Beamforming Algorithm Based on LCMV. In Proceedings of the 2005 Asia-Pacific Microwave Conference Proceedings, Suzhou, China, 4–7 December 2005; Volume 3, p. 3. [Google Scholar] [CrossRef]
- Liu, T.; Liu, W.; Zhou, Y.; Fan, K. Reduced-Dimension MVDR Beamformer Based on Sub-Array Optimization. IET Commun. 2022, 16, 2183–2192. [Google Scholar] [CrossRef]
- Van Trees, H.L. Characterization of Space-Time Processes. In Optimum Array Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002; Chapter 5; pp. 332–427. [Google Scholar] [CrossRef]
- Boonstra, A.J.; van der Tol, S. Spatial Filtering of Interfering Signals at the Initial Low Frequency Array (LOFAR) Phased Array Test Station. Radio Sci. 2005, 40, RS5S09. [Google Scholar] [CrossRef]
- Frost, O. An Algorithm for Linearly Constrained Adaptive Array Processing. Proc. IEEE 1972, 60, 926–935. [Google Scholar] [CrossRef]
- Bolli, P.; Davidson, D.B.; Bercigli, M.; Ninni, P.D.; Labate, M.G.; Ung, D.; Virone, G. Computational Electromagnetics for the SKA-Low Prototype Station AAVS2. JATIS 2022, 8, 011017. [Google Scholar] [CrossRef]
- Peng, G.; Cao, R.; Jiang, L.; Li, K.; Tao, X.; Zhang, Y.; Xu, Y.; Rong, D.; Xu, X. Digital Beamforming System for SKA Low Frequency Aperture Array. In Proceedings of the 2022 International Conference on Electromagnetics in Advanced Applications (ICEAA), Cape Town, South Africa, 5–9 September 2022; pp. 162–166. [Google Scholar] [CrossRef]
- Nybo, J. Development of a GPU-Based Real-Time Interference Mitigating Beamformer for Radio Astronomy. Master’s Thesis, Brigham Young University, Main Campus, Provo, UT, USA, 2019. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Demo | Total Slice | Slice Register | Slice LUTs | Block RAMs | DSP48s |
|---|---|---|---|---|---|
| PLMS | 28,887 | 80,543 | 76,861 | 147 | 826 |
| SMI | 37,741 | 110,287 | 103,082 | 200 | 739 |
| CBF | 27,785 | 80,088 | 71,565 | 147 | 688 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, G.; Jiang, L.; Tao, X.; Zhang, Y.; Cao, R. A Real-Time Adaptive Station Beamforming Strategy for Next Generation Phased Array Radio Telescopes. Sensors 2024, 24, 4723. https://doi.org/10.3390/s24144723
Peng G, Jiang L, Tao X, Zhang Y, Cao R. A Real-Time Adaptive Station Beamforming Strategy for Next Generation Phased Array Radio Telescopes. Sensors. 2024; 24(14):4723. https://doi.org/10.3390/s24144723
Chicago/Turabian StylePeng, Guoliang, Lihui Jiang, Xiaohui Tao, Yan Zhang, and Rui Cao. 2024. "A Real-Time Adaptive Station Beamforming Strategy for Next Generation Phased Array Radio Telescopes" Sensors 24, no. 14: 4723. https://doi.org/10.3390/s24144723
APA StylePeng, G., Jiang, L., Tao, X., Zhang, Y., & Cao, R. (2024). A Real-Time Adaptive Station Beamforming Strategy for Next Generation Phased Array Radio Telescopes. Sensors, 24(14), 4723. https://doi.org/10.3390/s24144723