
Adherent Peanut Image Segmentation Based on Multi-Modal Fusion

Abstract
1. Introduction
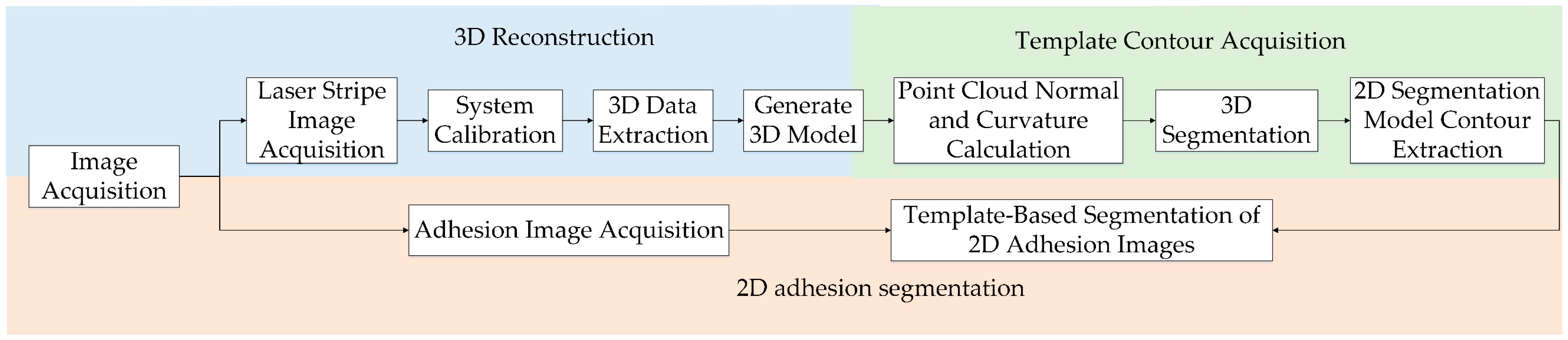
2. Principle of 3D-Assisted Segmentation Algorithm
3. Peanut 3D Reconstruction System
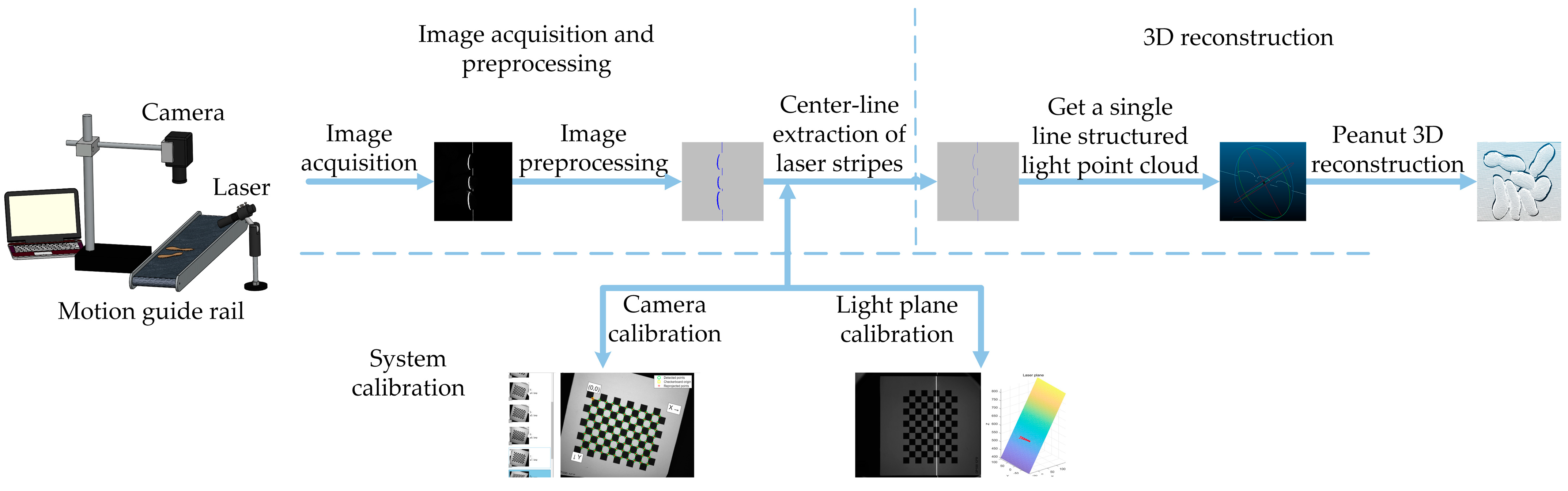
3.1. Peanut 3D Reconstruction System Architecture
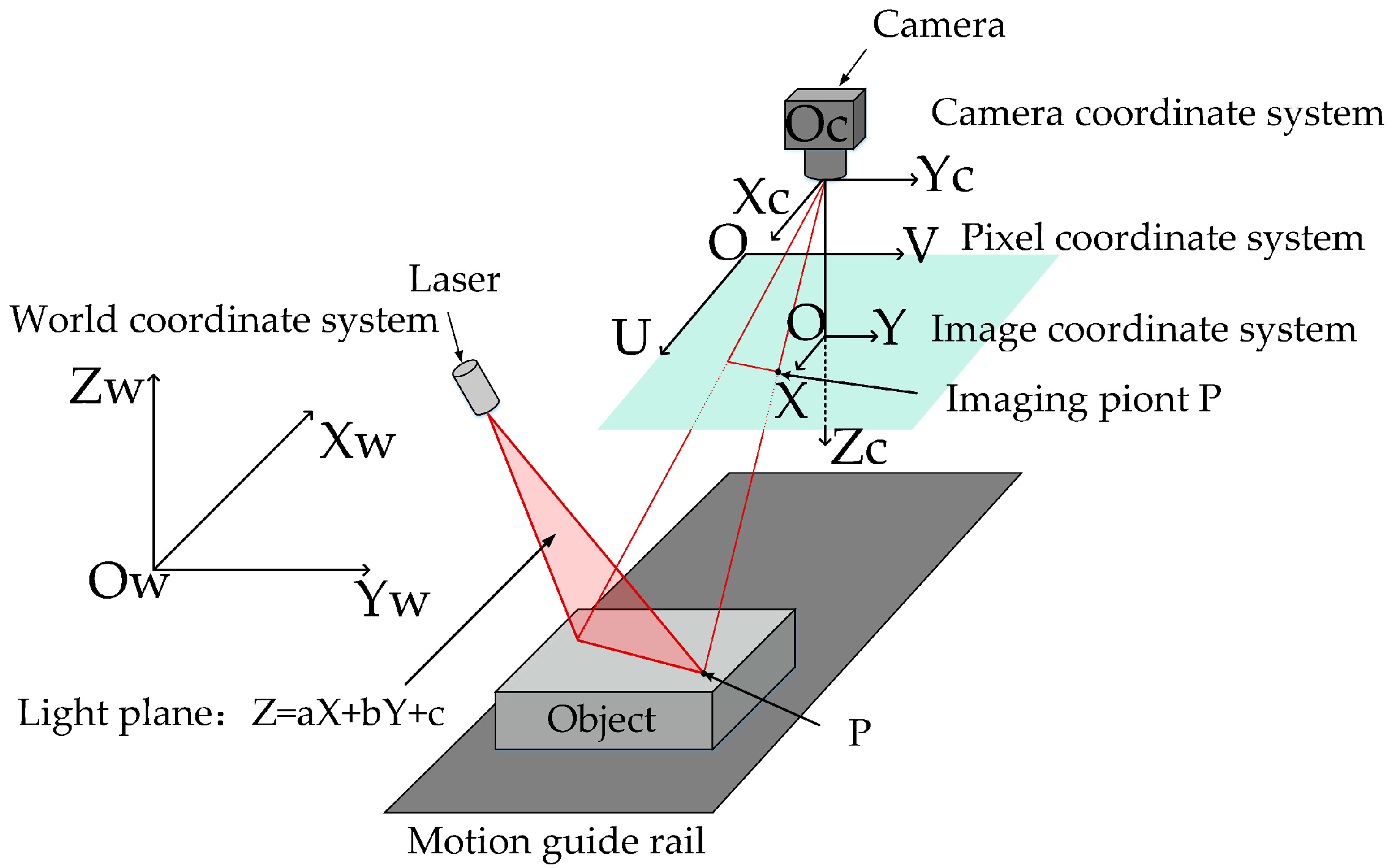
3.2. Principles of Line Structured Light Imaging System
4. Algorithm for Image Segmentation of Adherent Peanut Based on Three-Dimensional Morphology
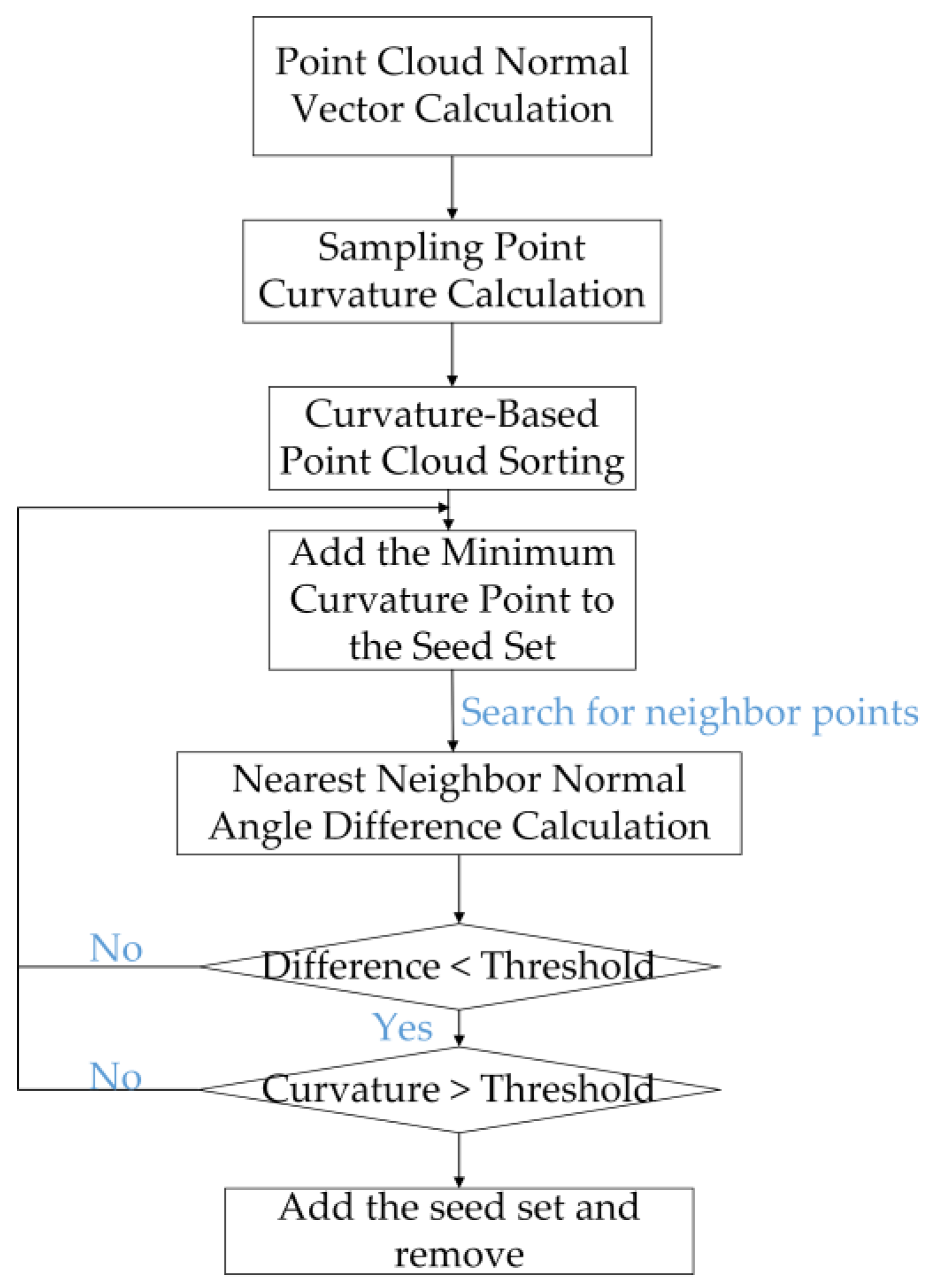
4.1. Point Cloud Segmentation Based on 3D Region Growth
- Calculate the normal vector and curvature of each point in the point cloud set one by one;
- Arrange the point cloud dataset according to the curvature value. Select the point with the lowest curvature as the initial seed point and add it to the seed point set;
- Use the KD-Tree algorithm to search the domain points of the selected seed point. Evaluate the angle between the normal vectors of the neighboring points and the current seed point one by one. If the angle is below a predefined threshold, assess whether the curvature of the neighboring point is less than a specified curvature threshold;
- If a domain point satisfies both the normal pinch angle constraint and the curvature threshold limit, the point is added to the current set of seed points and removed from the original point cloud dataset. The segmentation of a peanut model is completed when there are no more points that meet these conditions in the remaining point cloud data;
- Continuously loop the execution of steps (2)–(4) until all eligible point cloud data are effectively divided into a number of independent subsets of regions;
- The algorithm terminates when the number of remaining point clouds is less than the set minimum number of segmentation region points.
4.2. Point Cloud Edge Contour Extraction
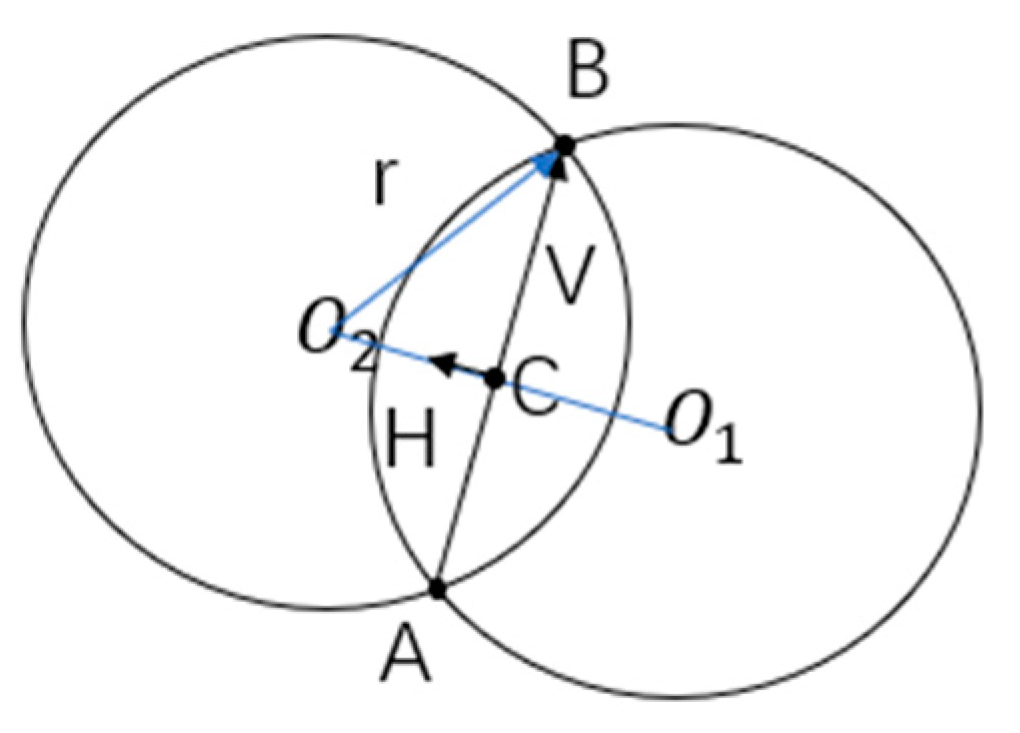
- Initialize the circle radius parameter of the roll method, traversing every line segment in the computational point cloud;
- If the length of is greater than the diameter, it is considered to be outside the valid search area;
- Based on the geometric principles shown in Figure 7, calculate the center of the circle and ;
- Determine the direction vector of the line segment , solve for the coordinates of the center of at , and compute the perpendicular vector of ;
- Calculate the chord length of , and solve for the perpendicular distance from the center of the circle to the line segment according to the formula for the center of the circle ;
- If there is a point in the interior of either circle that is not included in the point set Z, then are considered as boundary points;
- After completing the above steps, the contour boundary information of the point cloud data has been successfully extracted.
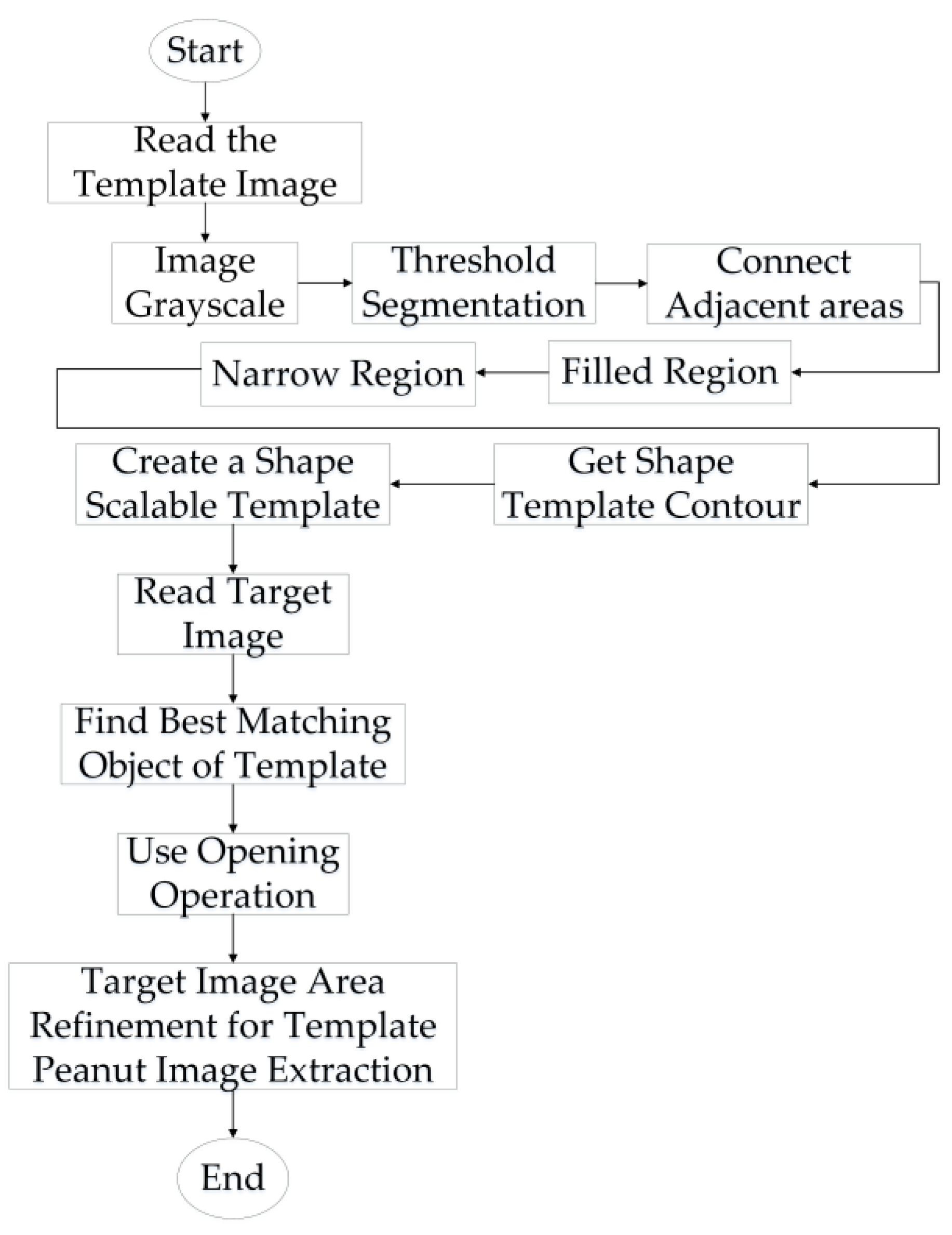
4.3. Image Adhesion Segmentation Based on Template Matching
5. Experimental Results and Analysis
- i.
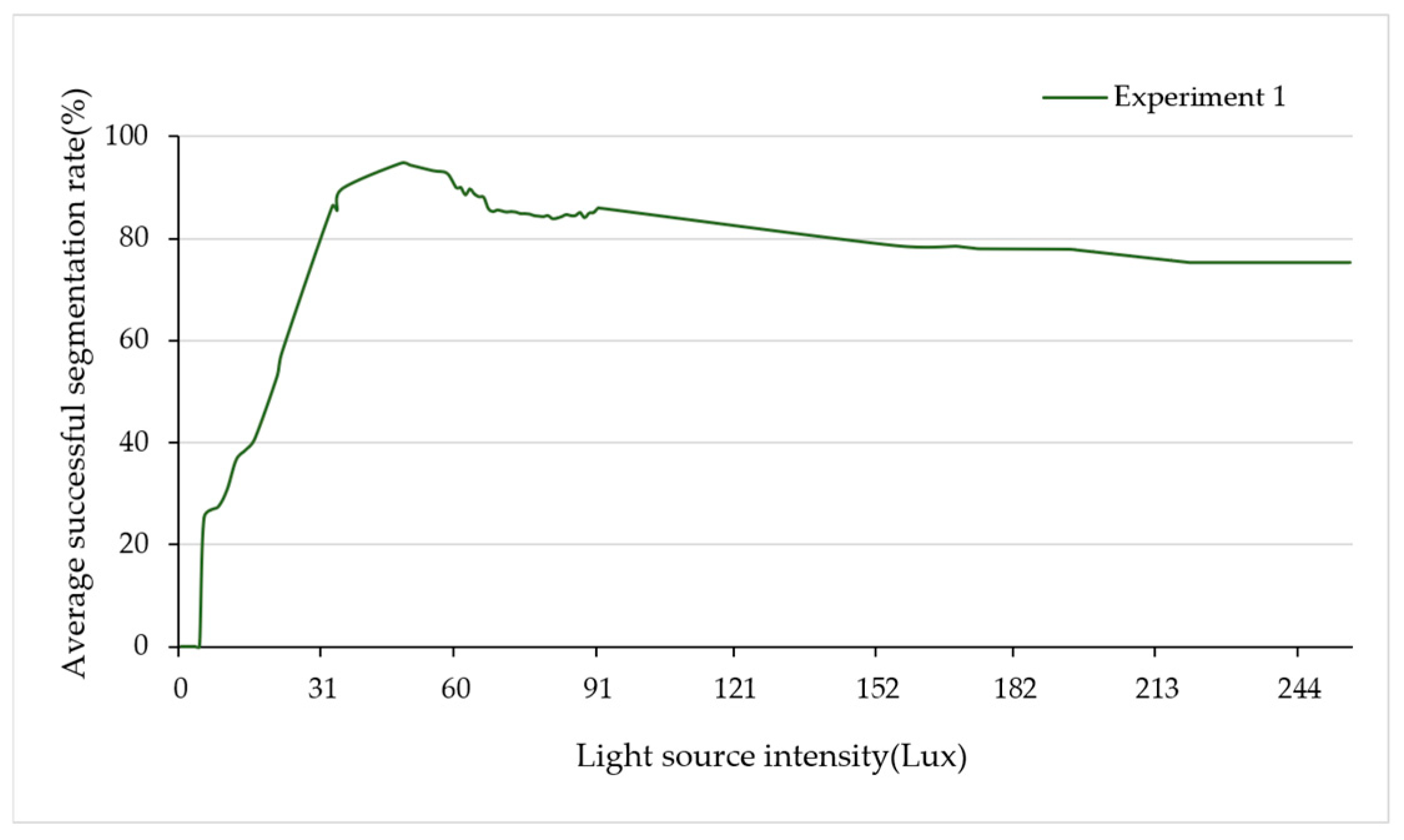
- Effect of light source intensity on edge position of 2D target image
- ii.
- Effect of different adhesion states on adhesion segmentation experiment
- iii.
- Effect of peanut effective ratio per unit area on adhesion segmentation experiment
- iv.
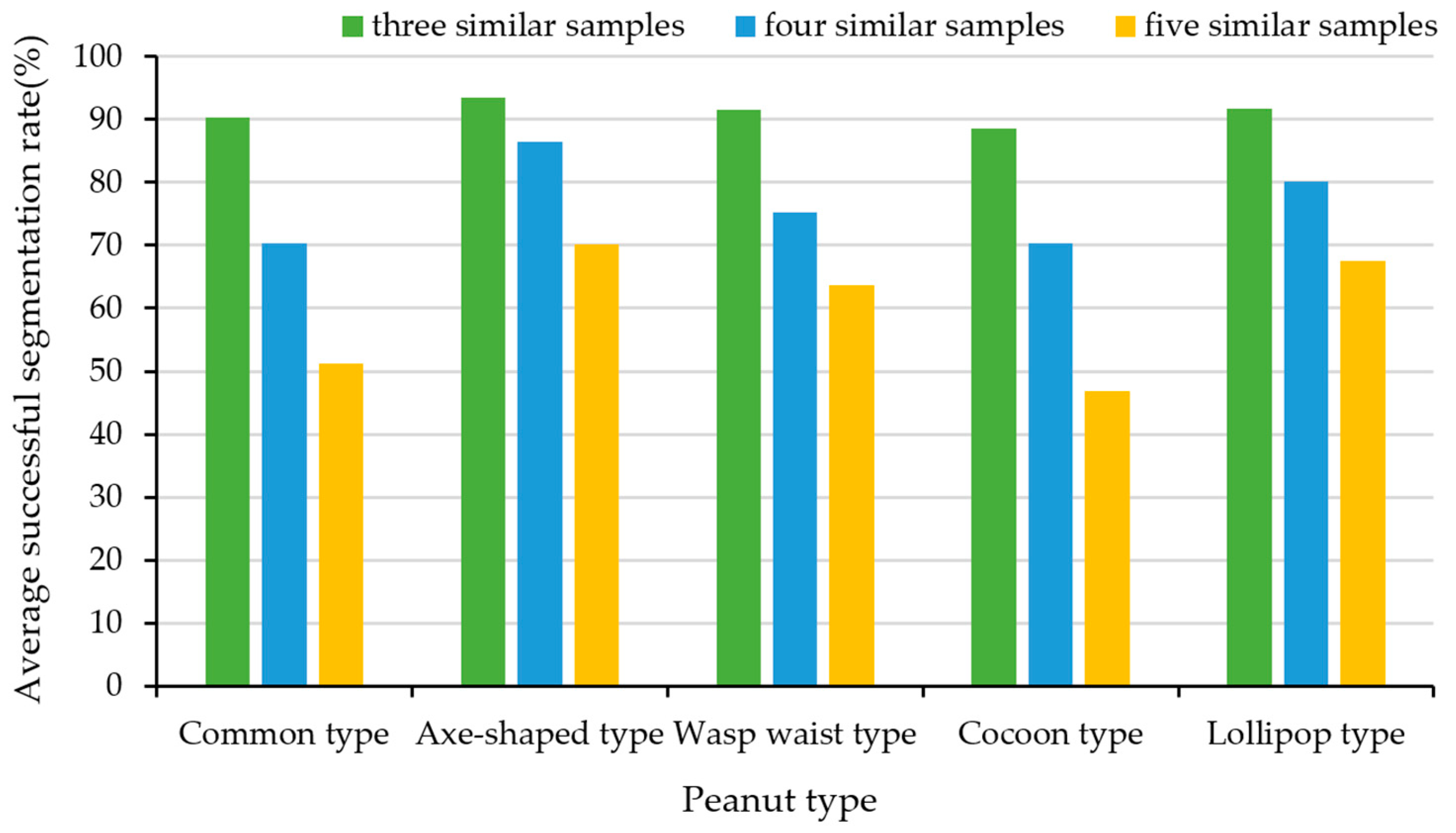
- Effect of different similar peanut quantity on adhesion segmentation experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, L.; Wang, C.; Yu, J.; Xu, N.; Wang, D. Method of Peanut Pod Quality Detection Based on Improved ResNet. Agriculture 2023, 13, 1352. [Google Scholar] [CrossRef]
- Hao, X.; Zhang, J.; Gao, W.; Yi, M.; Liu, J.; Zang, X. Analysis of peanut production cost and income in China. Agric. Technol. Bull. 2023, 11, 150–153. [Google Scholar] [CrossRef]
- Chen, B.; Wu, Z.; Li, H.; Wang, J. Research Progress on Agricultural Applications of Machine Vision Technology. Sci. Technol. Rev. 2018, 36, 54–65. [Google Scholar]
- Li, Q.; Peng, Y. Online Detection Technology of Backfat Thickness of Pig Carcasses Based on Machine Vision. Trans. Chin. Soc. Agric. Eng. 2015, 31, 256–261. [Google Scholar] [CrossRef]
- Chen, H.; Xia, Q.; Zuo, T.; Tan, H.; Bian, Y. Machine Vision Detection Technology for Damaged Shiitake Mushrooms. Trans. Chin. Soc. Agric. Mach. 2014, 45, 60–67. [Google Scholar]
- Deng, L.; Han, Z.; Yu, R. Research on Peanut Variety Identification System Based on Machine Vision. J. Agric. Mech. Res. 2013, 35, 166–169. [Google Scholar]
- Han, Z.; Zhao, Y. Variety and Quality Detection Method of Peanuts Based on Appearance Feature Recognition. J. Chin. Cereals Oils Assoc. 2009, 5, 123–126. [Google Scholar]
- Xie, Y.-C.; Yu, Z.-Y.; Jiang, H.-Y.; Jin, Q.; Cai, N.-N.; Liang, J.-D. Study on precise segmentation method for geometric phenotype measurement of wheat ear. J. Nanjing Agric. Univ. 2019, 42, 956–966. [Google Scholar]
- Nee, L.H.; Mashor, M.Y.; Hassan, R. White blood cell segmentation for acute leukemia bone marrow images. J. Med. Imaging Health Inform. 2012, 2, 278–284. [Google Scholar] [CrossRef]
- Song, H.; Zhao, Q.; Liu, Y. Splitting touching cells based on concave-point and improved watershed algorithms. Front. Comput. Sci. 2014, 8, 156–162. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, X.; Yu, H. Research on Image Segmentation Algorithm of Adhered Rice Grains Based on Machine Vision. J. Chin. Cereals Oils Assoc. 2018, 33, 106–112. [Google Scholar]
- Yan, H.; Cui, Q. Segmentation of Adhesion Region in Oat Kernel Recognition Based on Watershed Segmentation Algorithm. Comput. Era 2020, 23–25. [Google Scholar] [CrossRef]
- Jia, W.; Tian, Y.; Luo, R.; Zhang, Z.; Lian, J.; Zheng, Y. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput. Electron. Agric. 2020, 172, 105380. [Google Scholar] [CrossRef]
- Yang, S.; Zheng, L.; He, P.; Wu, T.; Sun, S.; Wang, M. High-throughput soybean seeds phenotyping with convolutional neural networks and transfer learning. Plant Methods 2021, 17, 50. [Google Scholar] [CrossRef]
- Araújo, S.; Alves, W.A.L.; Belan, P.A.; Anselmo, K. A computer vision system for automatic classification of most consumed Brazilian beans. In Proceedings of the Advances in Visual Computing: 11th International Symposium, ISVC 2015, Las Vegas, NV, USA, 14–16 December 2015; Proceedings, Part II 11, 2015. pp. 45–53. [Google Scholar]
- Belan, P.A.; de Macedo, R.A.G.; Alves, W.A.L.; Santana, J.C.C.; Araujo, S.A. Machine vision system for quality inspection of beans. Int. J. Adv. Manuf. Technol. 2020, 111, 3421–3435. [Google Scholar] [CrossRef]
- Wang, X.; Yao, L.; Wen, H.; Zhao, J. Morphological Multiscale Reconstruction Combined with Concave Point Matching for Segmentation of Goji Berry Images. Agric. Eng. Vol. 2018, 34, 212–218. [Google Scholar]
- Yang, L.; Qin, H. Corn Ear Adhesion Image Segmentation Algorithm Based on Concave Point Detection. J. Hangzhou Univ. Electron. Sci. Technol. 2022, 42, 42–48. [Google Scholar]
- Yi, M.; Wang, J.; Yin, J.; Guo, F.; Zhang, J.; Tang, C.; Li, X.; Wan, S. Influence of Nitrogen Reduction and Calcium Addition at Different Application Periods on Growth, Development, and Physiological Characteristics of Peanut. J. Agric. Sci. Technol 2021, 23, 164–172. [Google Scholar] [CrossRef]
- Wang, C.; Fu, Y.; Li, Y.; Zhong, K.; Bao, W. Calibration Method of Line Structured Light Measurement System Based on Vanishing Points. Laser Optoelectron. Prog. 2021, 58, 2212003. [Google Scholar]
- Li, X.; Zhang, W.; Song, G. Calibration method for line-structured light three-dimensional measurement based on a simple target. Photonics 2022, 9, 218. [Google Scholar] [CrossRef]
- Tang, R. Research on Key Technologies of Surface Visual Measurement with Complex Optical Properties. Ph.D. Thesis, Tianjin University, Tianjin, China, 2017. [Google Scholar]
- Li, Y.; Zhang, Z.; Yuan, L. Review on Center Extraction of Line Structured Light Stripes. Laser Optoelectron. Prog. 2013, 50, 100002. [Google Scholar]
- Zhang, X.; Huang, T.; Zhang, Y.; Gao, H.; Jiang, M. Image-Pro Plus Analysis Method for Concrete Pore Structure Images. Jianzhu Cailiao Xuebao J. Build. Mater. 2015, 18, 177–182. [Google Scholar]
- Yu, Z.; Yang, Y.; Wang, Y.; Liu, X.; Zhou, P.; Zhou, G. Research on 3D Face Measurement and Segmentation System. J. Appl. Opt. 2021, 42, 664–670. [Google Scholar]
- Wang, S. Research on Measurement Method of Workpiece Surface Profile Based on Point Cloud Reconstruction Technology. Master’s Thesis, Shandong University, Jinan, China, 2020. [Google Scholar]
- Fang, K.; Xu, K.; Wu, Z.; Huang, T.; Yang, Y. Three-Dimensional Point Cloud Segmentation Algorithm Based on Depth Camera for Large Size Model Point Cloud Unsupervised Class Segmentation. Sensors 2023, 24, 112. [Google Scholar] [CrossRef]
- Fu, Y.; Li, C.; Zhu, J.; Wang, B.; Zhang, B.; Fu, W. Alpha-shape Algorithm for Constructing Jujube Point Cloud 3D Model. Trans. Chin. Soc. Agric. Eng. 2020, 36, 214–221. [Google Scholar]
- Wang, S.; Chen, X.; Si, H. Monotonically Increasing SSDA Algorithm Based on Remote Sensing Image Information Characteristics. J. East China Jiaotong Univ. 2013, 1, 15–21. [Google Scholar]
- An, Y.; Yu, Z.; Wang, B.; Chen, S.; Zhang, A.; Xu, S. Research on Image Positioning Technology of Core Detector Components Based on Halcon. Nucl. Power Eng. 2022, 43, 196–200. [Google Scholar]
- Gao, H.; Tham, J.; Xue, P.; Lin, W. Complexity analysis of morphological area openings and closings with set union. IET Image Process. 2008, 2, 231–238. [Google Scholar] [CrossRef]
- You, Y.; Fan, Y.; Pang, Q. Segmentation Method of Adhered Cells Based on Distance Transformation. Comput. Eng. Appl. 2005, 41, 206–208. [Google Scholar]
- Zhang, W.; Han, J.; Guo, B.; Li, X.; Liu, S. Application of Improved Watershed Algorithm in Adhesion Image Segmentation. Comput. Appl. Softw. 2021, 38, 243–248. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peanut Sample | Acc of Watershed Algorithm Based on Distance (%) | Acc of Watershed Algorithm Based on Gradient (%) | Acc of Proposed Algorithm (%) | |
|---|---|---|---|---|
| Pre-Opening | Post-Opening | |||
| a | 76.9 | 70.8 | 91.2 | 95.9 |
| b | 60.3 | 73.7 | 93.8 | 96.7 |
| c | 81.4 | 82.6 | 93.5 | 97.4 |
| d | 66.5 | 88.2 | 91.6 | 96.6 |
| e | 51.8 | 65.5 | 93.4 | 96.1 |
| f | 37.2 | 41.3 | 97.5 | 98.3 |
| Average Acc(%) | 62.3 | 70.35 | 93.5 | 96.8 |
| Runtime/s | 1.03 | 3.24 | 1.58 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Ye, F.; Zeng, J.; Cai, J.; Huang, W. Adherent Peanut Image Segmentation Based on Multi-Modal Fusion. Sensors 2024, 24, 4434. https://doi.org/10.3390/s24144434
Wang Y, Ye F, Zeng J, Cai J, Huang W. Adherent Peanut Image Segmentation Based on Multi-Modal Fusion. Sensors. 2024; 24(14):4434. https://doi.org/10.3390/s24144434
Chicago/Turabian StyleWang, Yujing, Fang Ye, Jiusun Zeng, Jinhui Cai, and Wangsen Huang. 2024. "Adherent Peanut Image Segmentation Based on Multi-Modal Fusion" Sensors 24, no. 14: 4434. https://doi.org/10.3390/s24144434
APA StyleWang, Y., Ye, F., Zeng, J., Cai, J., & Huang, W. (2024). Adherent Peanut Image Segmentation Based on Multi-Modal Fusion. Sensors, 24(14), 4434. https://doi.org/10.3390/s24144434