3.1. Statistical Evaluation of InSAR and GNSS-PPP Results
For the InSAR analysis, the ground displacements were obtained along the
LOS direction. Calò et al. [
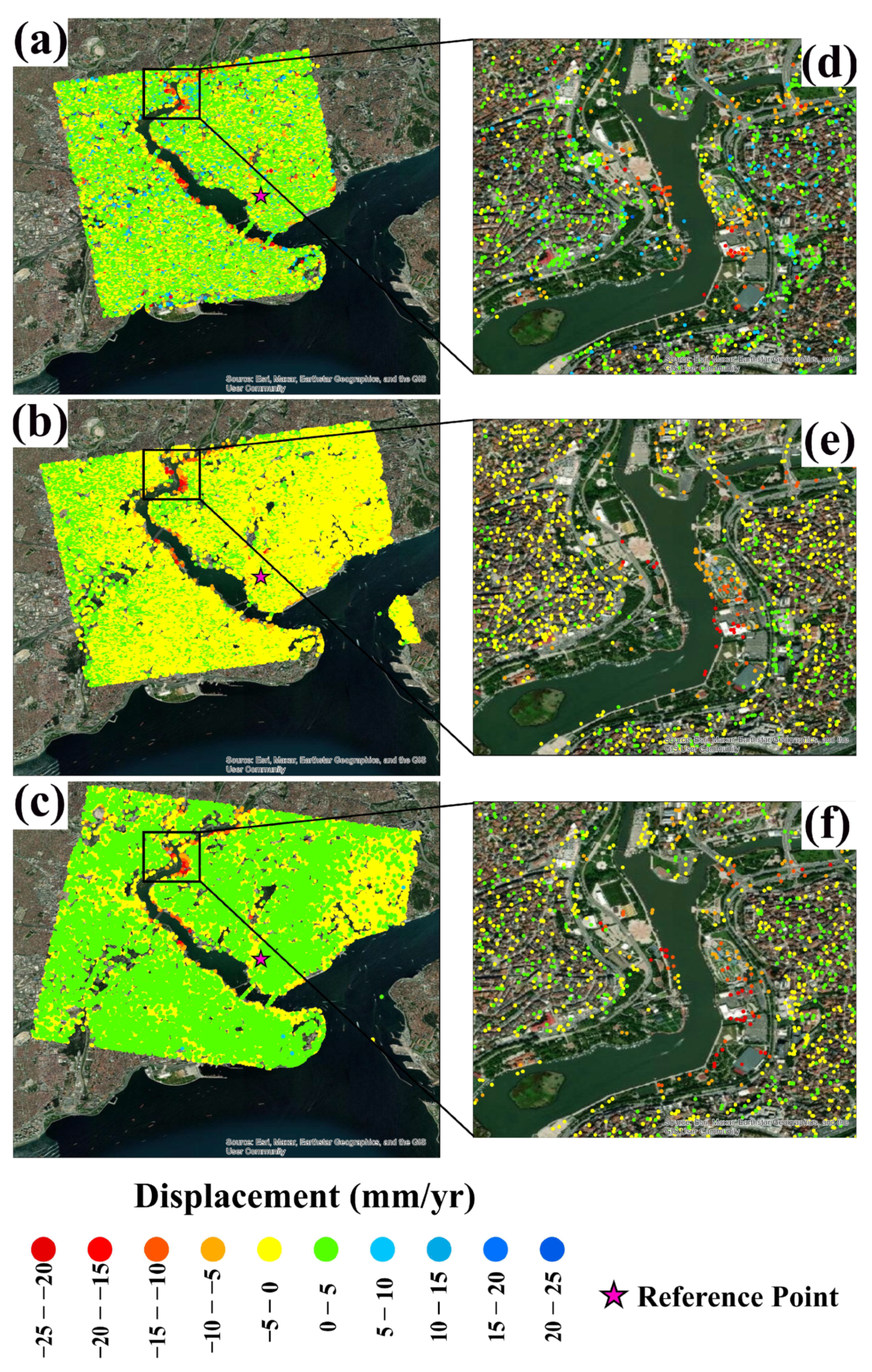
4] employed one and a half years of TerraSAR-X data from November 2010 to June 2012, utilizing the Small Baseline Subset (SBAS) method. Their analysis revealed deformation in the coastal areas of the GH, resulting in a displacement of approximately 4–5 cm (an average of ~3 cm/year). Moreover, Imamoglu et al. [
2] reported a displacement rate of 8 mm/year based on Sentinel-1 data collected between 2014 and 2017. Additionally, Aslan et al. [
1] determined a maximum displacement of 10 mm/year using Sentinel-1 data for the same period. The present study corroborates these findings, indicating displacement values in the same region, particularly within the latter section of the GH. Furthermore, it is observed that the observed movement has persisted in this area after 2017.
From the GNSS measurements, the ground displacements are obtained in the topocentric coordinate system, namely, the east, north, and up directions. To compare the results obtained from InSAR and GNSS, we calculated the
LOS displacements of the GNSS analysis by using the equation given by Hanssen [
23] in Equation (3):
where
and
denote the angle of incidence of the radar wave and the direction angle of the satellite,
,
, and
are the displacements obtained from the PPP solutions using the observations from the GNSS campaigns. To calculate the velocities of the stations for the InSAR and GNSS techniques, Equation (4) was used.
Here,
and
denote the displacements in the
LOS direction in epoch
and the reference epoch, respectively, and
is the velocity. In the velocity estimation step, we also applied the Pope test to exclude outliers [
24].
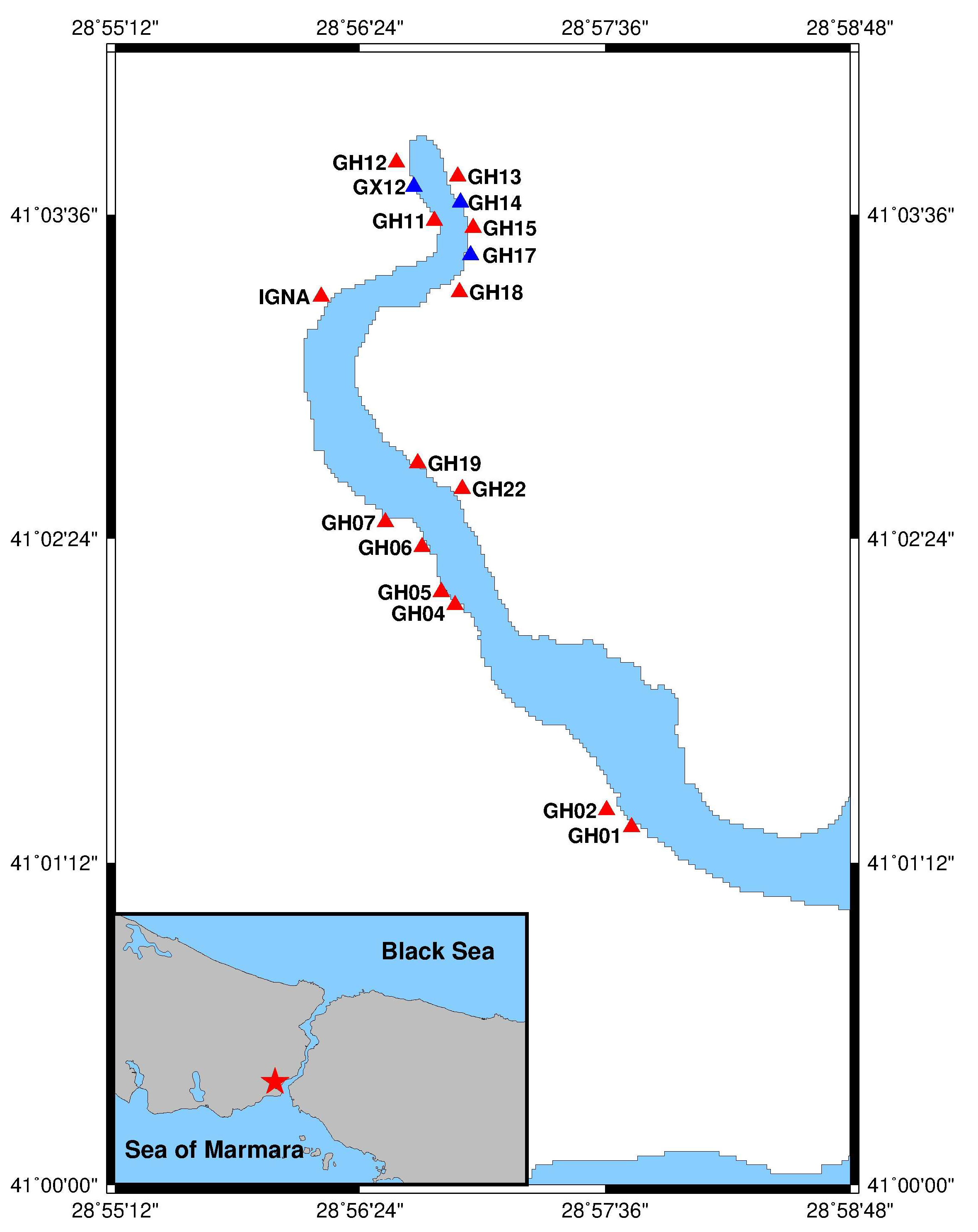
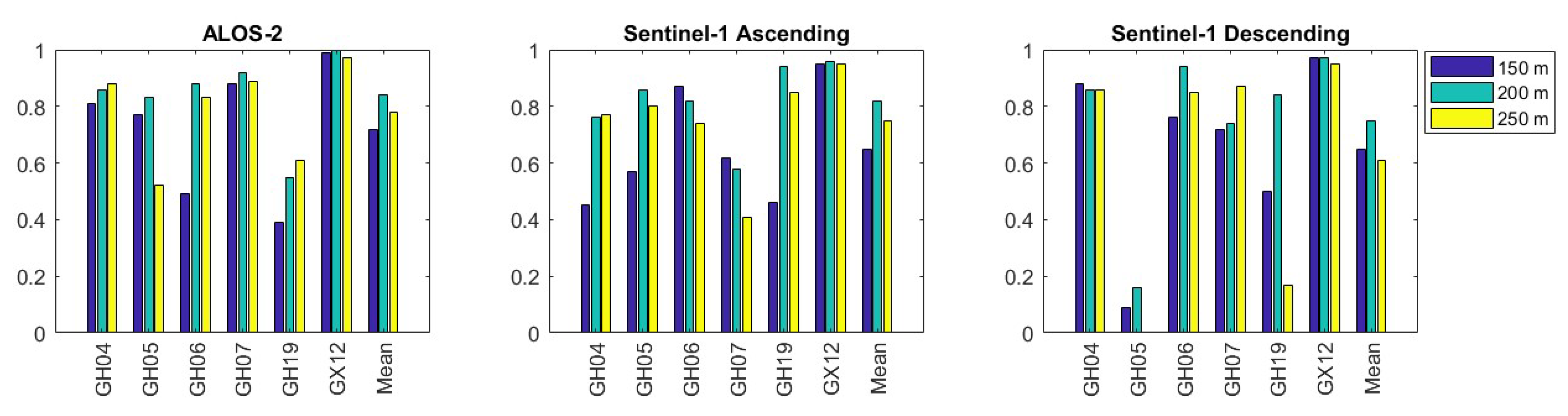
Before comparing the velocities, we checked the stations’ velocities obtained by the GNSS analysis to see whether the movements were significant. In this step, considerable displacement was seen in nine of the seventeen stations. The subsequent analysis was performed for the nine stations. To compare the InSAR velocities and velocities obtained from the GNSS observations, we calculated the GHGNSS network stations’ InSAR-based velocities using the PS points’ velocities. Here, we created five different circle areas for each station. The centers of the circles were chosen as the GNSS stations, and the radii were determined as 50, 100, 150, 200, and 250 m. Then, we used the PS points within the determined circles. In
Table 3 and
Table 4, the numbers of the PS points are shown for each station and each circle. As expected, and in the case of the ALOS-2 data (
Table 3), the number of PS points increases when the radius increases for the Sentinel-1 data (
Table 4).
As shown in
Table 3 and
Table 4, there are no PS points in some areas within the first and second-smallest circles, i.e., in the 50 m and 100 m radii. As a result, statistical analyses and estimates were carried out for the other circles (150, 200, and 250 m). Next, we calculated the correlations of the displacements of the PS points within the circles and the GNSS stations’ displacements. The correlations between the ALOS-2 and GNSS data are up to values of 0.72, 0.84, and 0.78, respectively. The correlations between Sentinel-1 descending and GNSS are 0.65, 0.75, and 0.61; between Sentinel-1 ascending and GNSS, they are 0.65, 0.82, and 0.75. As can be seen from the correlation values, the best values were reached at a radius of 200 m for all three datasets. Hence, the statistical evaluations for this study will be on the results obtained in the 200 m radius since the highest correlation values were obtained in the 200 m radius circle.
The correlation values for the GH02, GH13, and IGNA stations were close to zero between the GNSS stations and PS points. Thus, these three stations were not included in the evaluation scope due to the errors caused by the observation periods and the possible problems that may have occurred in the campaign measurements. The sources of these errors will be examined in future research.
Under the assumption that the PS points within the circles reflect the GNSS stations’ movements, we took the average of the PS points’ displacements. We calculated the standard deviations for each station. However, some of the PS points within the circles could be outliers. Hence, we applied the median approach to the PS points’ displacements to exclude outliers before taking averages in each epoch for each GNSS station. With a 50% breakdown point, the median approach is one of the most reliable outlier detection methods [
20,
25,
26]. Additionally, the median and median absolute deviation (MAD) are more efficient in outlier detection than the mean and standard deviation. The approach was applied using Equation (5).
where
denotes the displacements of the PS points. And
is the number of the PS points. In this approach, the
values are compared with 3 ×
.
In the next step, the InSAR velocities of the GNSS stations for ALOS-2 and Sentinel-1 were estimated by least square estimation (LSE) based on Equation (4) [
27]. In the velocity estimation, we also considered the standard deviations of the displacements for each technique. Thus, we took into account the weights of each PS point.
As stated, six stations and three circles were analyzed using statistical methods. However, we simply reported the data of the 200 m radius circle for explanation purposes (
Table 5 and
Table 6). In
Table 5, the velocities obtained from the InSAR methods are shown. The GNSS velocities, transformed into
LOS directions, have been presented in
Table 6.
As seen from
Table 5, the velocities of the Sentinel-1 ascending and descending stations fit very well for most of the stations, and their formal errors are below 1 mm/yr. The correlation of the velocities is “0.96”. Moreover, almost all the formal errors of the velocities from ALOS-2 are sub-mm/yr. The correlations of the velocities from ALOS-2 and Sentinel-1 ascending and from ALOS-2 and Sentinel-1 descending are 0.98 and 0.93, respectively. However, the formal errors of the GNSS velocities are higher than the InSAR’s (see
Table 6). This might be related to the number of observations. Meanwhile, in the InSAR techniques, there are numerous observations; seven campaigns were carried out for GNSS observations. Nevertheless, the GNSS velocities can be compared with the InSAR technique since, in almost all stations, the directions of the movements are the same for the GNSS and InSAR methods. Moreover, we calculated the correlation values of the displacements between the InSAR and GNSS techniques for all three datasets for 150 m, 200 m, and 250 m. During the correlation calculation, the displacements of the PS points within the distinct buffer zone radii and the displacements derived from the GNSS analyses, which were transformed into the LOS direction, were utilized. These analyses were performed across various buffer zones (
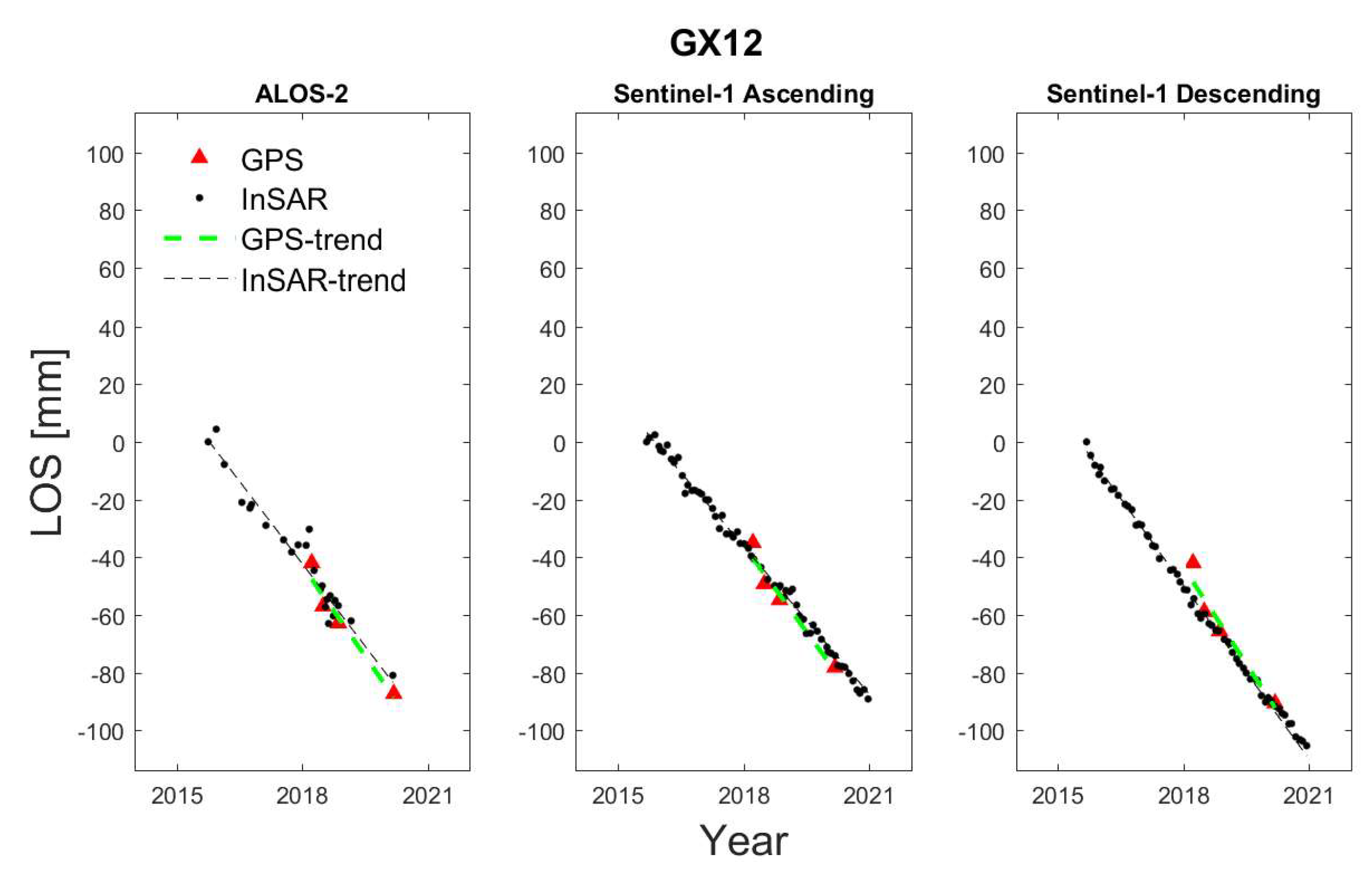
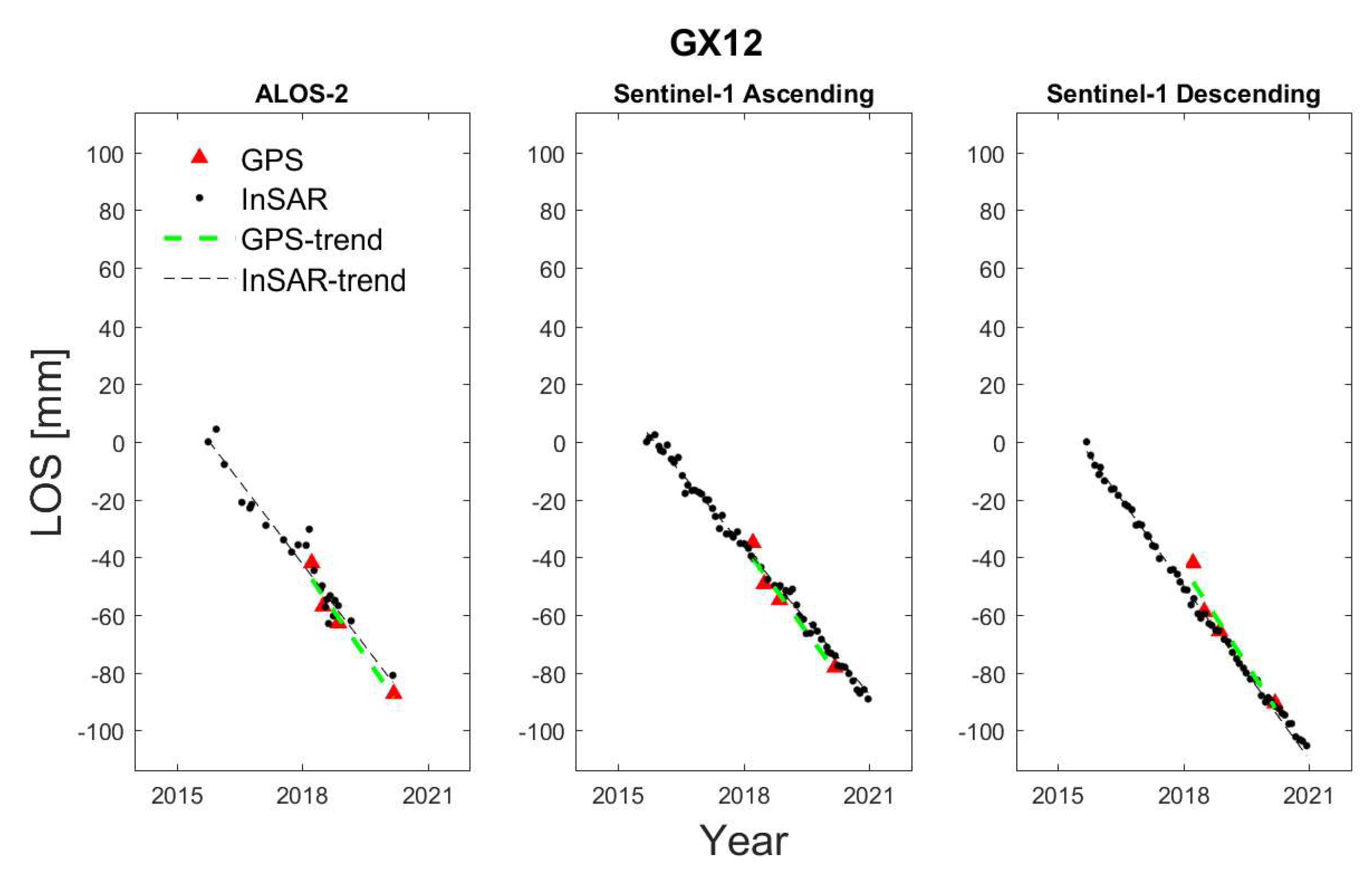
Figure 4). For the 200 m radius circle, the highest correlation between the GNSS and InSAR techniques was found at GX12 for the ALOS-2 and Sentinel-1 datasets.
One should note that since the incidence and heading angles are different for the InSAR datasets, the
LOS values should be compared separately. Hence, we plotted the time series for each dataset, as in
Figure 5. It can be seen from the figure that since the
LOS values derived from the GNSS perfectly fit its trend, the correlation values are also high. One should note that it is possible to compare the combination/integration of the InSAR analysis with the GNSS. We also integrated the three InSAR datasets in this study. The results of the integration are presented in the next section.
In the next step, we tested the significance of the velocity differences between the GNSS and InSAR techniques to determine whether the differences are statistically different from zero. To carry this out, we calculated the ratios of the velocity differences by dividing their standard deviations (Equation (6)).
where
is the test value,
and
are the velocities obtained from GNSS and InSAR, and
and
are the standard deviations of the velocities, respectively. The test values were compared with the critical value with a 95% confidence level.
According to
Table 7, the velocity differences for station GH19 are significant. For other stations, all differences are insignificant. Although it can be seen from
Table 5 and
Table 6 that the velocity differences are up to 1–1.5 cm for GH06, the differences are negligible since the formal error of the GNSS is high compared to the InSAR. The reader should note that the test values are the ratios of the velocity differences obtained by dividing their standard deviations. The test values are significantly lower because the GNSS velocities have more considerable standard deviations than InSARs. Nevertheless, in the stations (except GH06 and GH19), the trends of the GNSS and InSAR techniques show the same direction and fit. The maximum velocity difference is 3.68 mm/yr.
3.2. Multi-Orbit/Multi-Frequency SAR Integration
In this subsection, we finally address the problem of decomposing the
LOS-projected ground displacement rates into the region’s 3D (up–down, east–west, and north–south) displacement rates. Generally speaking, at least three
LOS-projected displacement rates recovered from the complementary (ascending/descending) orbits are needed to solve this problem. Our work combined the ALOS-2, Sentinel-1 ascending, and Sentinel-1 descending SAR datasets. Nonetheless, since the satellites fly near-polar orbits, the sensitivity of the
LOS displacements to the north–south components of the deformation is significantly limited, and only the vertical and east–west displacement rates can accurately be retrieved. Indeed, it is known that the sensitivities of the SAR system to the 3D ground motions are as follows:
where [U
v, U
E, U
N] are the 3D components of the ground deformation,
is the local incidence angle, and
is the azimuth angle. Accordingly, the observation equation can be written as follows:
where i, j, and k represent ALOS-2, Sentinel-1 ascending, and Sentinel-1 descending, respectively, [
LOSi,
LOSj,
LOSk]
T is the vector of the relevant
LOS-projected ground-displacement rates, and
is the transformation matrix:
Instead of applying more sophisticated, time-consuming approaches for the calculation of the 3D ground displacement rates, relying on the combination of the
LOS-projected ground displacement time series (e.g., see [
28,
29,
30]), in this work, we followed the straightforward strategy outlined in [
31], which assumes the deformations are almost linear over time (and this assumption is reliable in our case) and only requires
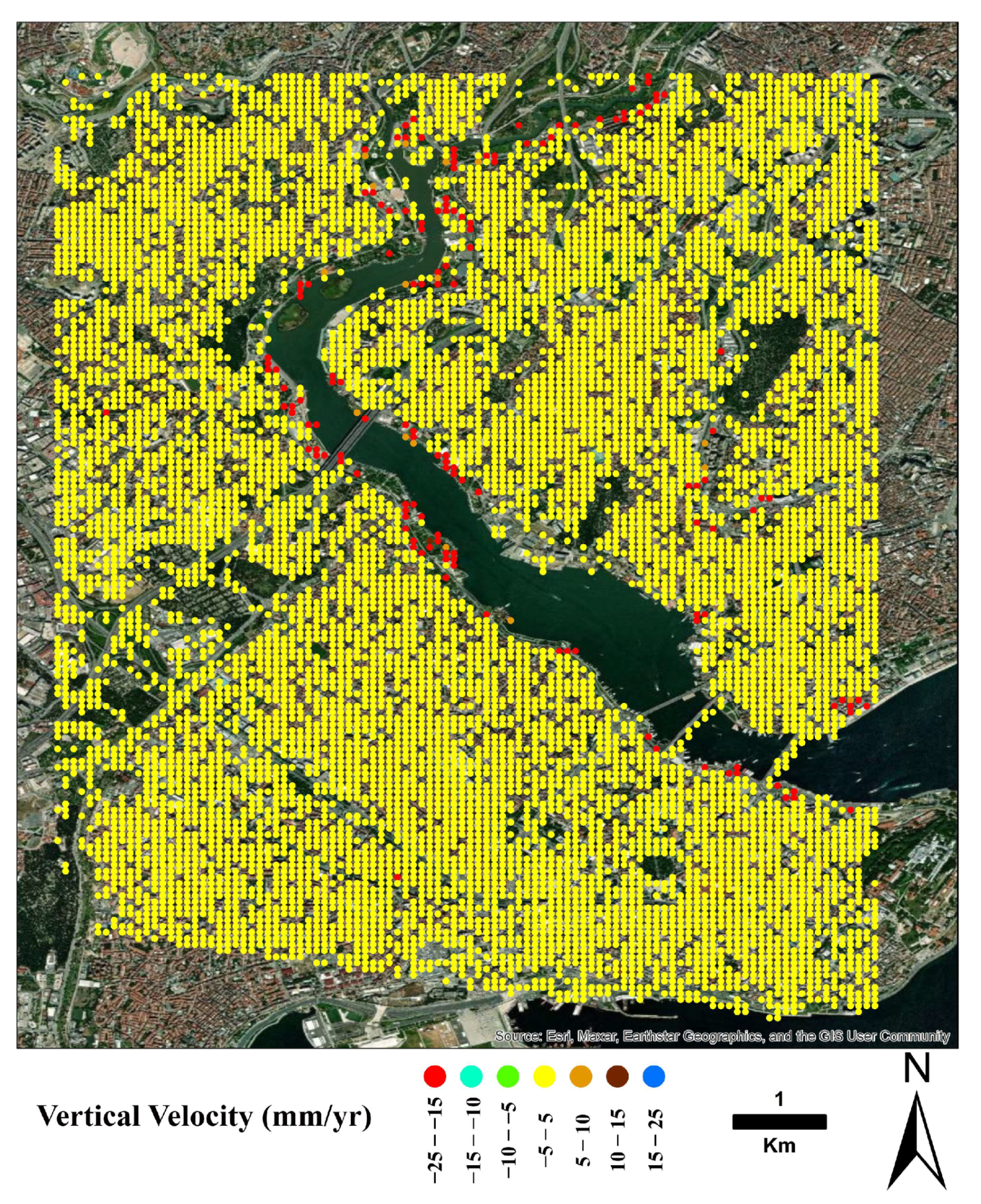
LOS-projected ground displacement rates to be available for the three datasets over a common spatial grid. To this aim, the obtained ground displacement rates of the detected PS points were calculated over 50 m × 50 m grid points after masking the incoherent areas. Then, Equation (8) was applied to recover the 3D ground deformation rates.
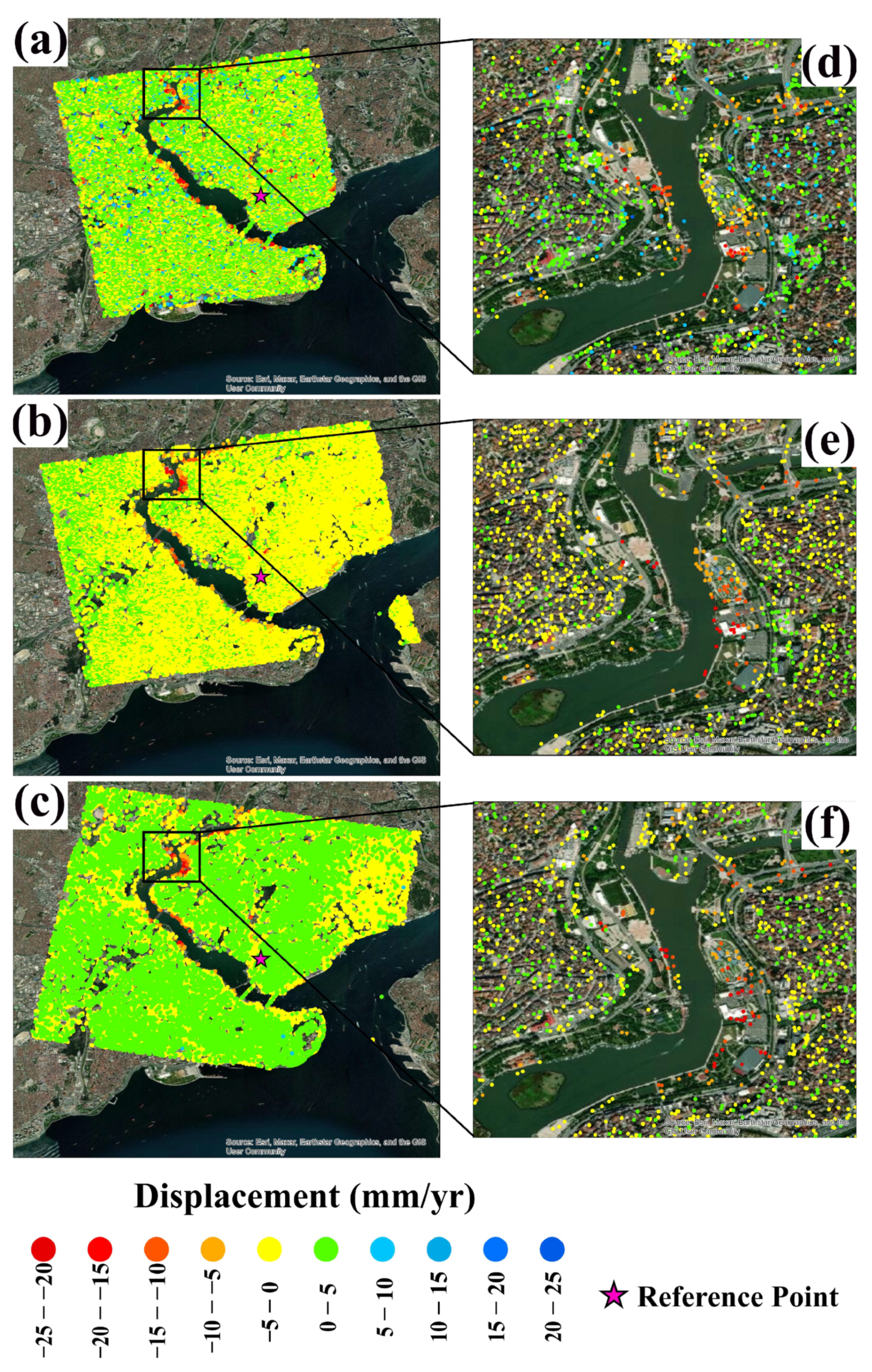
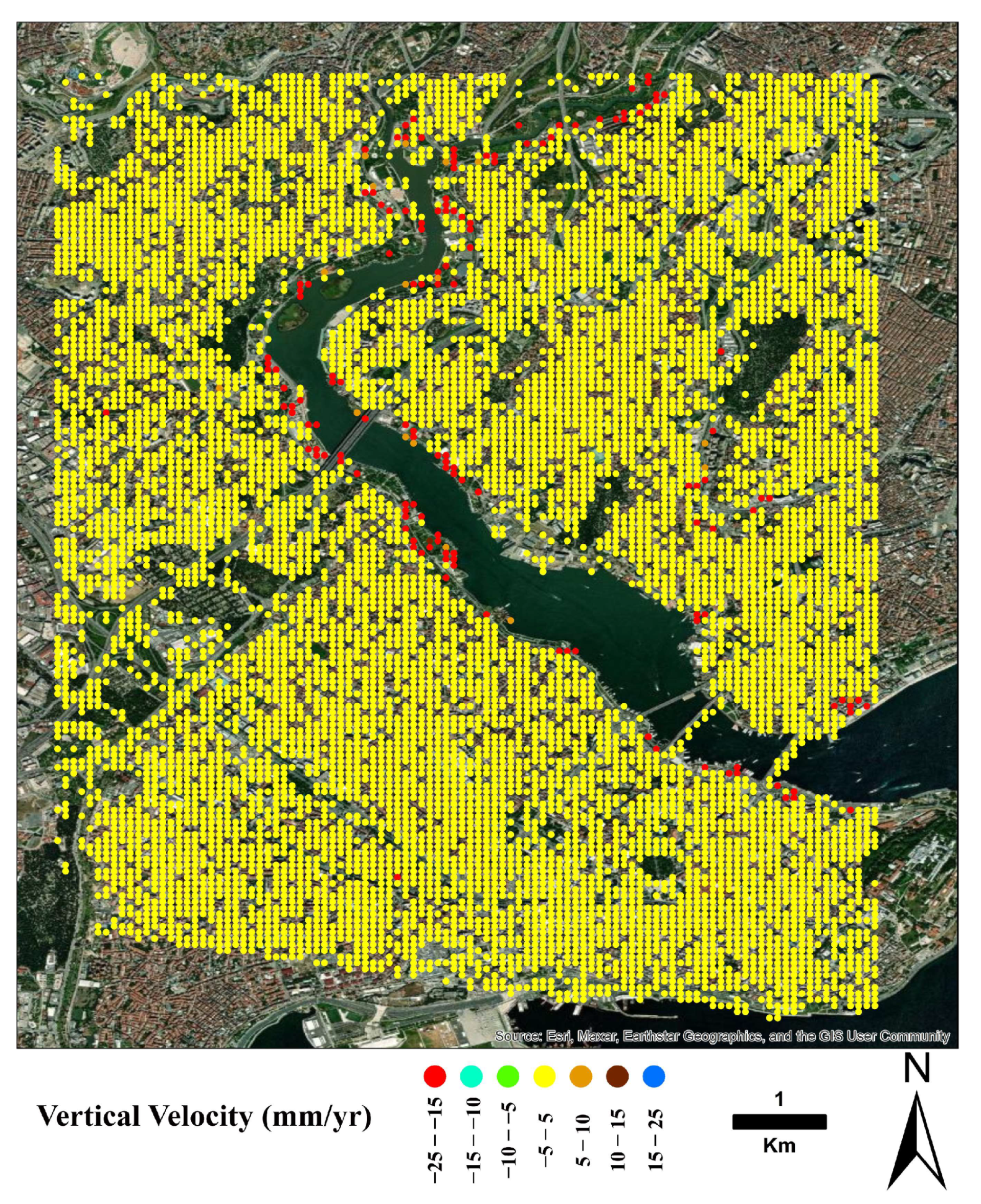
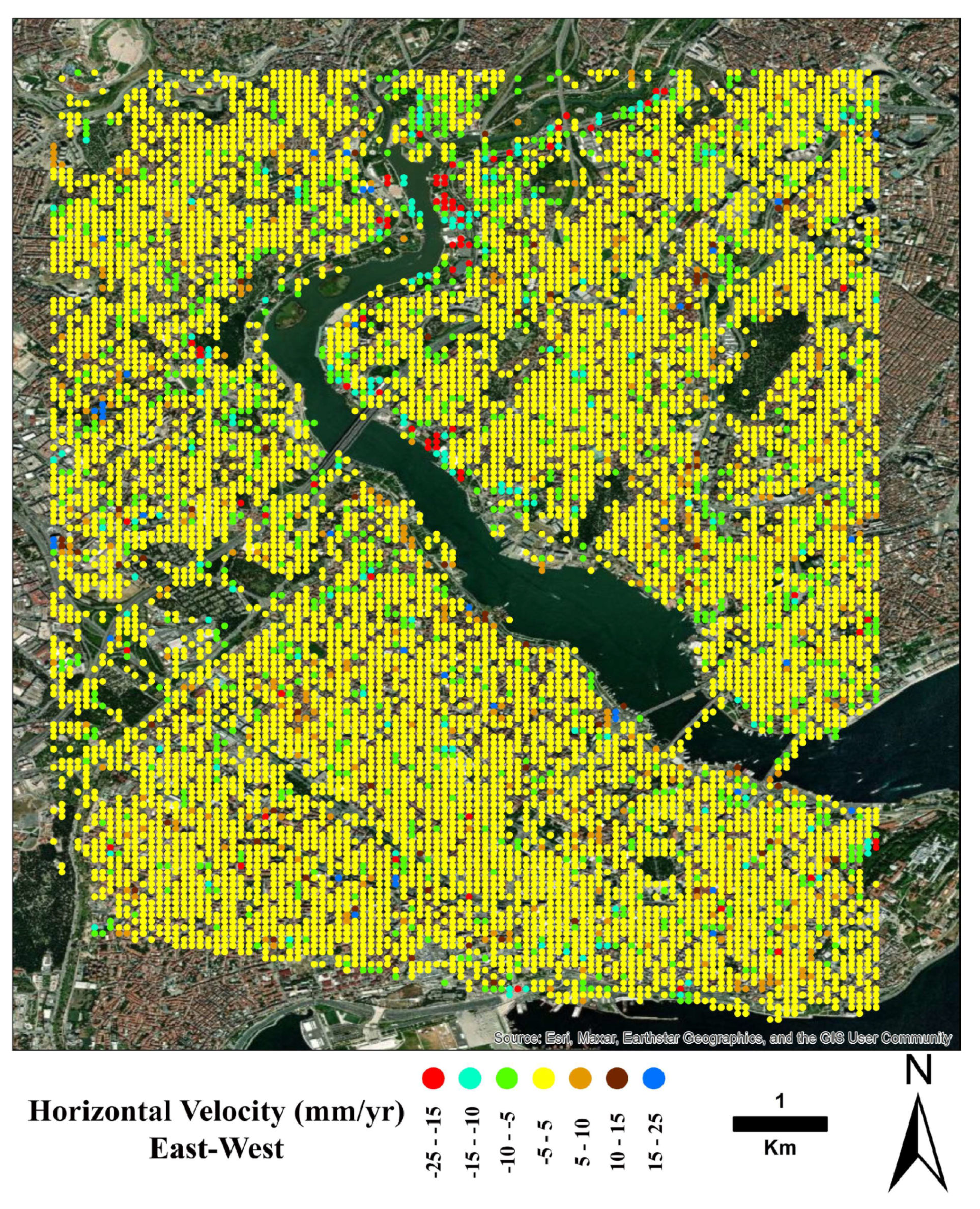
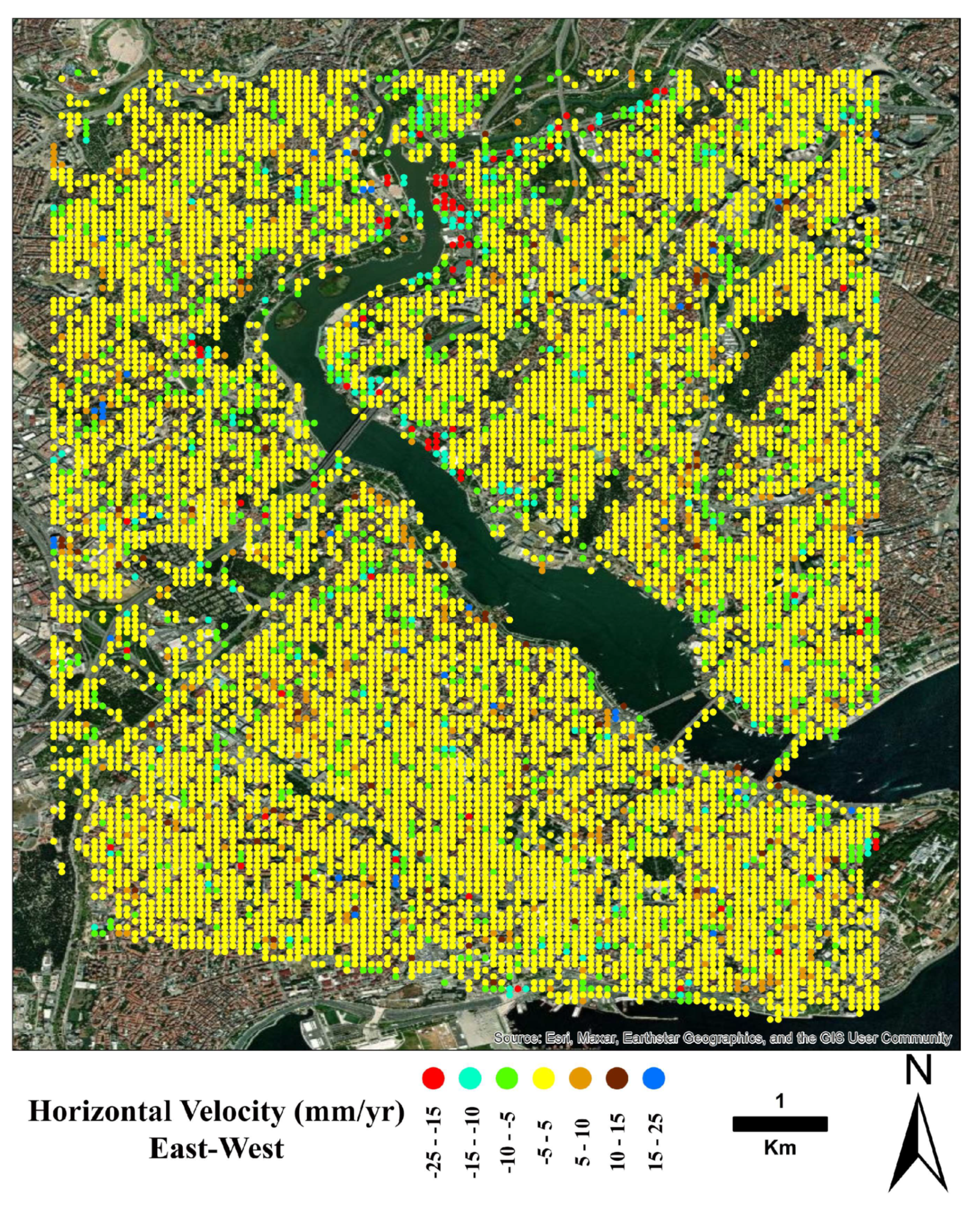
Figure 6 shows the region’s vertical (up–down) displacement rate map. As can be seen from the figure, the subsidence was obtained mainly in the coastal areas and the northern side of the GH. Moreover,
Figure 7 shows a map of the region’s horizontal (east–west) displacement rates.
In the final step, we calculated the vertical displacement rates of the GNSS stations based on the PS points within the 200 m radius circle (
Table 8). According to
Table 8, it can be concluded that the vertical movements of the stations show the same direction for almost all stations. The velocities obtained from the PPP solutions are consistent with those based on the PS points. The correlation of the velocities is 0.96 (except GH06 and GH19). For GH06 and GH19, we found relatively higher displacement rates with PPP. This might be related to the PS point number within the circle and the displacements of the PS points.
The InSAR and GNSS techniques are frequently used in the determination of surface deformations. Validation between the GNSS and InSAR data outcomes cannot be made with any degree of certainty. While determining the deformations in the Istanbul Golden Horn Region for our study, we used GNSS and InSAR data. The PS points that fell into it were identified by creating a circle with the optimum radius around the GNSS station to compare these two methods. The correlation values of the displacements were computed to determine the radius of this circle enclosing the GNSS station. ALOS-2 and Sentinel-1 datasets were found to have the highest correlation at points with a radius of 200 m. Fabris et al. [
8] also investigated the integration of GNSS and InSAR to monitor the land subsidence in the Po River Delta by determining the circle around the GNSS stations. They also selected a 200 m radius circle but without any statistical analysis. In this study, we considered the correlation values to choose the most suitable radius. Moreover, only velocities in the
LOS direction were analyzed in that study.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}