

A Study on E-Nose System in Terms of the Learning Efficiency and Accuracy of Boosting Approaches

Abstract
1. Introduction
2. Related Work
2.1. Conventional E-Nose Studies
2.2. Deep Learning-Based E-Nose Studies
3. Design and Development of the Gas Detection Platform
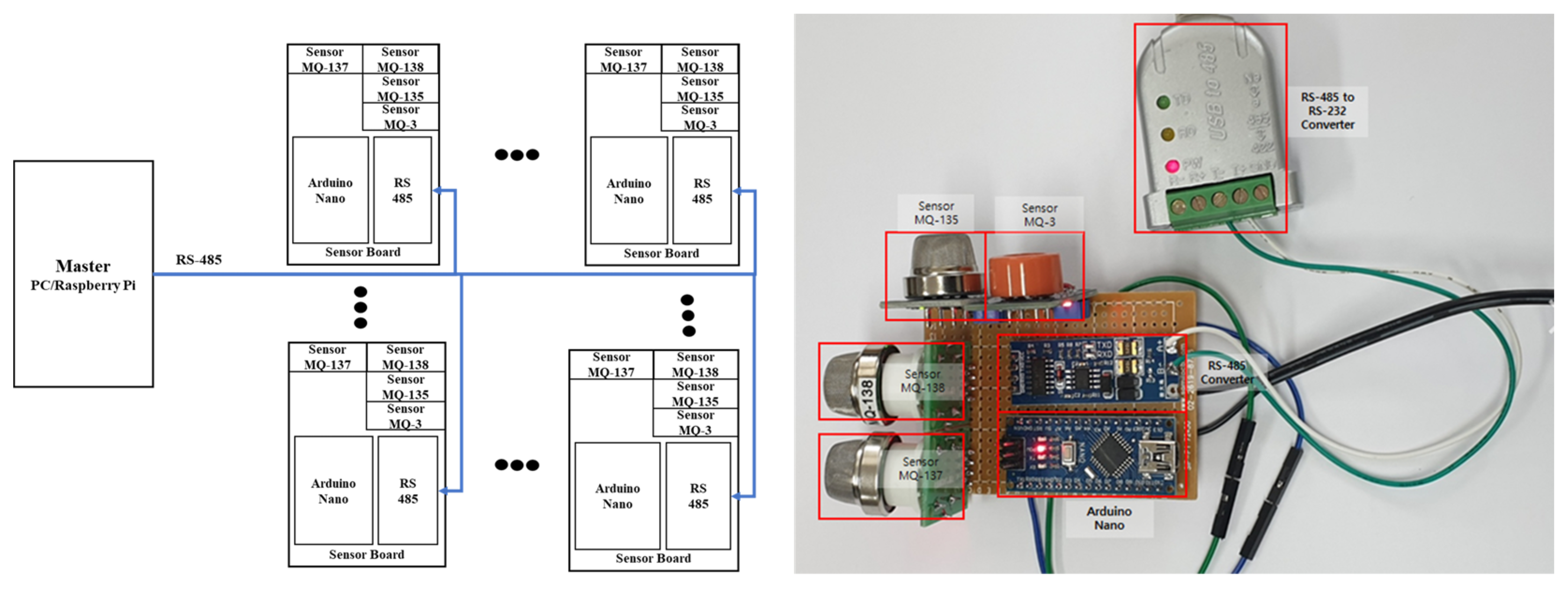
3.1. Gas Detection Platform Hardware Design
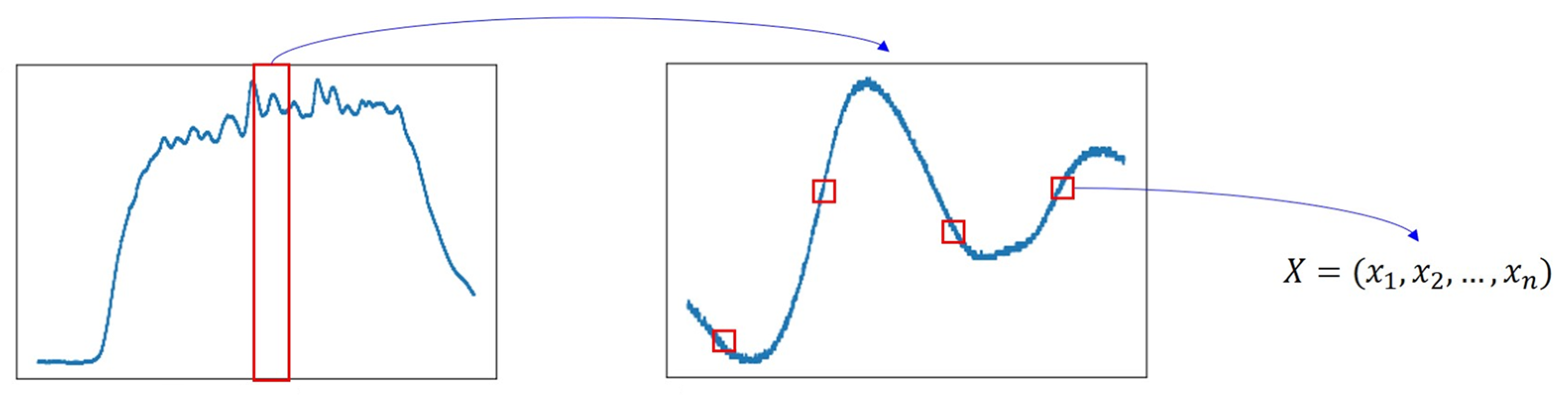
3.2. Gas Detection Platform Software Design
4. Experiments
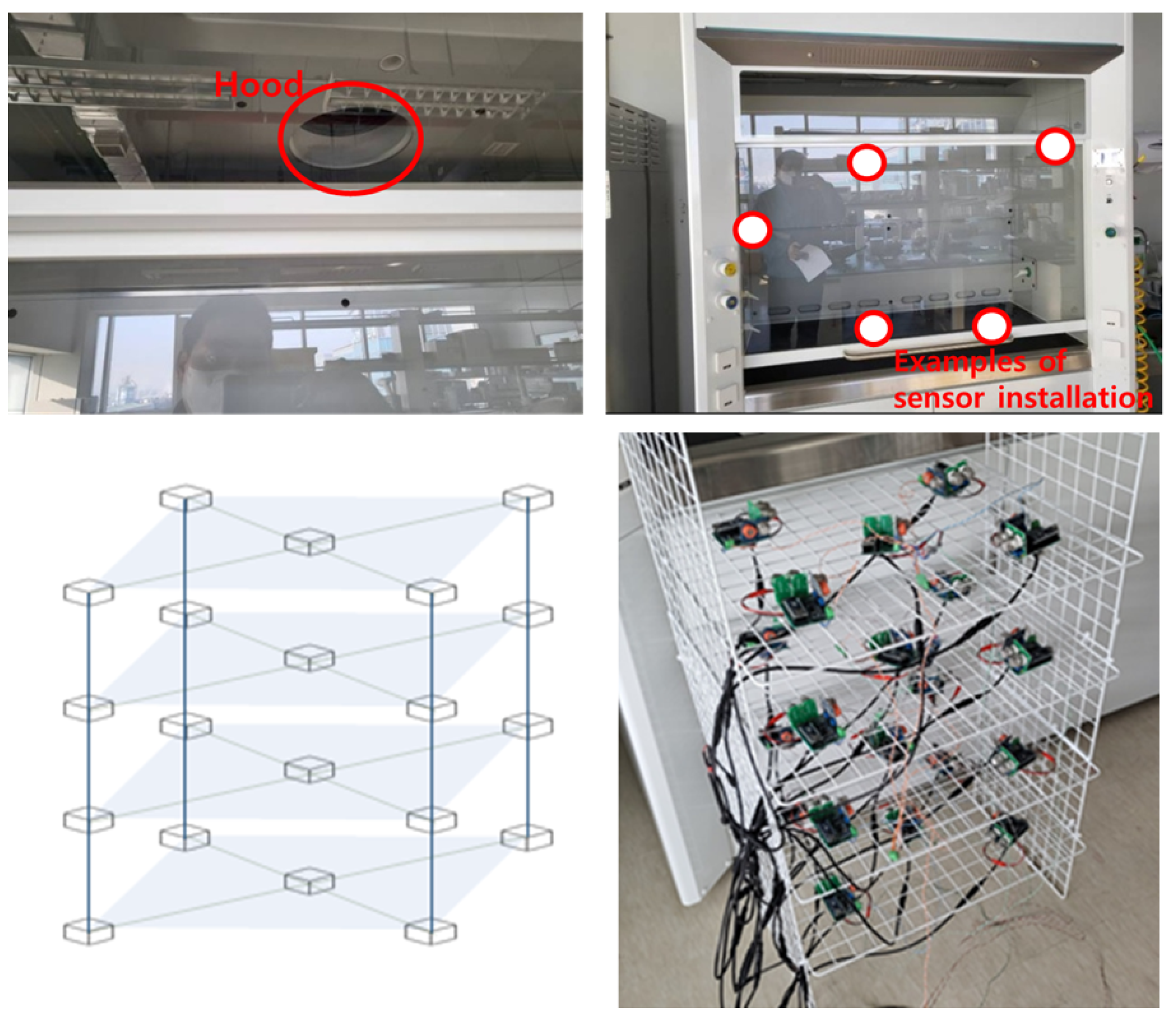
4.1. Data Collection and Experiments Using a Chemical Laboratory Hood
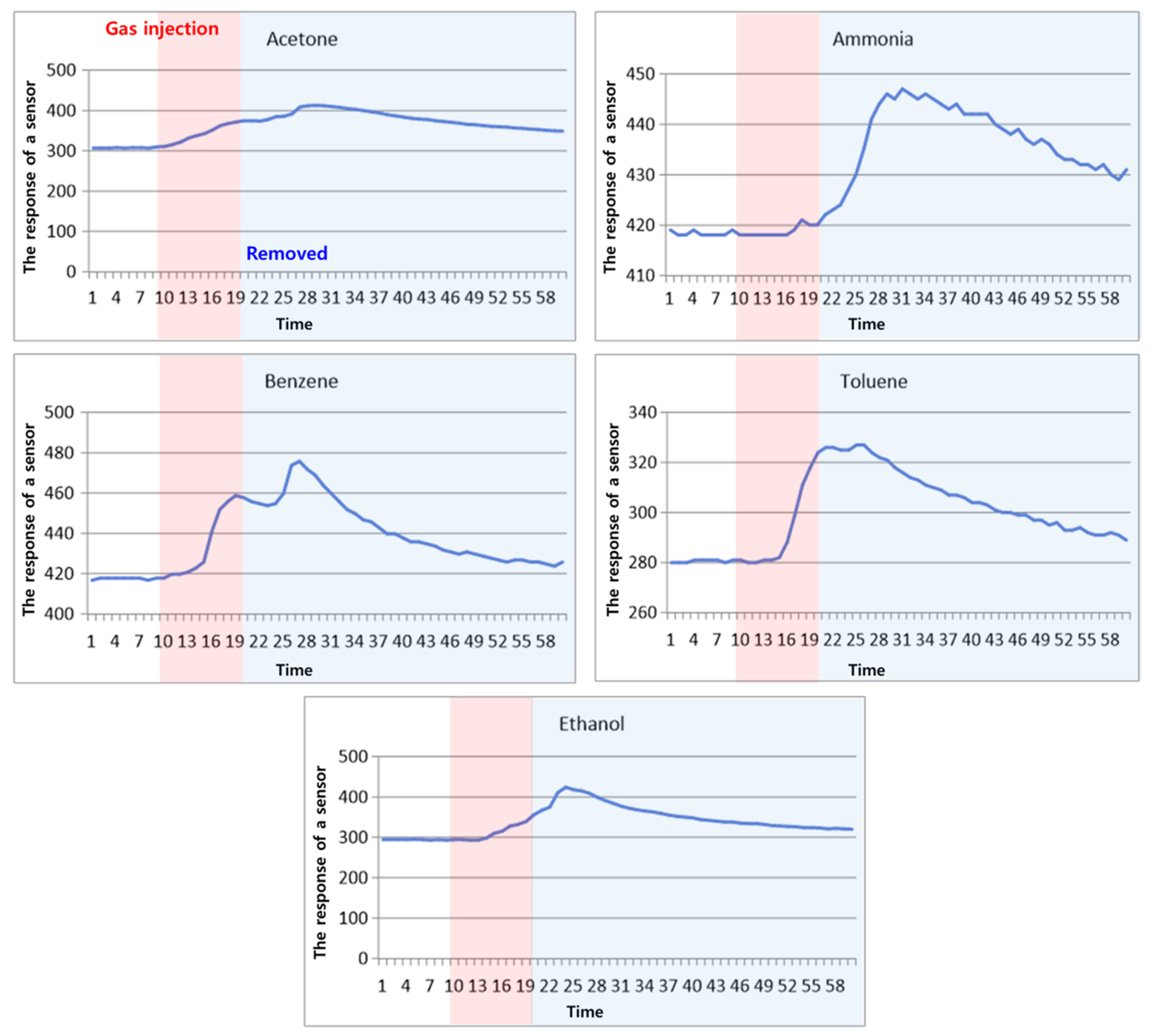
4.2. Experimental Results on Collected Data
4.3. Experimental Results on Published Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Calvini, R.; Pigani, L. Toward the Development of Combined Artificial Sensing Systems for Food Quality Evaluation: A Review on the Application of Data Fusion of Electronic Noses, Electronic Tongues and Electronic Eyes. Sensors 2022, 22, 577. [Google Scholar] [CrossRef] [PubMed]
- Freddi, S.; Sangaletti, L. Trends in the Development of Electronic Noses Based on Carbon Nanotubes Chemiresistors for Breathomics. Nanomaterials 2022, 12, 2992. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Hu, Z.; Hu, X.; Li, D.; Tian, S. Electronic tongue and electronic nose for food quality and safety. Food Res. Int. 2022, 162, 112214. [Google Scholar] [CrossRef] [PubMed]
- Maier, D.; Hulasare, R.; Qian, B.; Armstrong, P. Monitoring carbon dioxide levels for early detection of spoilage and pests in stored grain. In Proceedings of the 9th International Working Conference on Stored Product Protection, Sao Paulo, Brazil, 15–18 October 2006; Volume 1, p. 117. [Google Scholar]
- Lilienthal, A.J.; Loutfi, A.; Duckett, T. Airborne chemical sensing with mobile robots. Sensors 2006, 11, 1616–1678. [Google Scholar] [CrossRef]
- Alizadeh, N.; Jamalabadi, H.; Tavoli, F. Breath acetone sensors as non-invasive health monitoring systems: A review. IEEE Sens. J. 2020, 20, 5–31. [Google Scholar] [CrossRef]
- Loizeau, F.; Lang, H.P.; Akiyama, T.; Gautsch, S.; Vettiger, P.; Tonin, A.; Yoshikawa, G.; Gerber, C.; de Rooij, N. Piezoresistive membrane-type surface stress sensor arranged in arrays for cancer diagnosis through breath analysis. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 621–624. [Google Scholar]
- Covington, J.A.; Marco, S.; Persaud, K.C.; Schiffman, S.S.; Nagle, H.T. Artificial olfaction in the 21st century. IEEE Sens. J. 2021, 21, 12969–12990. [Google Scholar] [CrossRef]
- Krishna, P.; George, D. Analysis of discrimination mechanisms in the mammalian olfactory system using a model nose. Nature 1982, 299, 352–355. [Google Scholar]
- Kwon, D.S.; Jung, G.W.; Shin, W.J.; Jeong, Y.J.; Hong, S.B.; Oh, S.B.; Bae, J.H.; Park, B.G.; Lee, J.H. Low-power and reliable gas sensing system based on recurrent neural networks. Sens. Actuator B Chem. 2021, 340, 129258. [Google Scholar] [CrossRef]
- Kim, J.-H.; Chun, J.; Kim, J.W.; Choi, W.J.; Baik, J.M. Self-powered, roomtemperature electronic nose based on triboelectrification and heterogeneous catalytic reaction. Adv. Funct. Mater 2015, 25, 7049–7055. [Google Scholar] [CrossRef]
- Güntner, A.T.; Koren, V.; Chikkadi, K.; Righettoni, M.; Pratsinis, S.E. E nose sensing of low-ppb formaldehyde in gas mixtures at high relative humidity for breath screening of lung cancer. ACS Sens. 2016, 1, 528–535. [Google Scholar] [CrossRef]
- Cho, S.Y.; Lee, Y.H.; Lee, S.W.; Kang, H.Y.; Kim, J.H.; Choi, J.H.; Ryu, J.; Joo, H.E.; Jung, H.T.; Kim, J.H. Finding Hidden Signals in Chemical Sensors Using Deep Learning. Anal. Chem. 2020, 92, 6529–6537. [Google Scholar] [CrossRef] [PubMed]
- Huixiang, L.; Qing, L.; Bin, Y.; Lei, Z.; Yu, G. Bionic Electronic Nose Based on MOS Sensors Array and Machine Learning Algorithms Used for Wine Properties Detection. Sensors 2019, 19, 45. [Google Scholar]
- Cong, F.; Hua-Yao, L.; Long, L.; Hu-Yin, S.; Jiang, T.; Xiang, B.; Huan, L. Smart Electronic Nose Enabled by an All-Feature Olfactory Algorithm. Adv. Intell. Syst. 2022, 4, 2200074. [Google Scholar]
- Bilgera, C.; Yamamoto, A.; Sawano, M.; Matsukura, H.; Ishida, H. Application of Convolutional Long Short-Term Memory Neural Networks to Signals Collected from a Sensor Network for Autonomous Gas Source Localization in Outdoor Environments. Sensors 2018, 18, 4484. [Google Scholar] [CrossRef] [PubMed]
- Vergara, A.; Fonollosa, J.; Mahiques, J.; Trincavelli, M.; Rulkov, N.; Huerta, R. On the performance of gas sensor arrays in open sampling systems using inhibitory support vector machines. Sens. Actuators B Chem. 2013, 185, 462–477. [Google Scholar] [CrossRef]
- Attallah, O. Multitask Deep Learning-Based Pipeline for Gas Leakage Detection via E-Nose and Thermal Imaging Multimodal Fusion. Chemosensors 2023, 11, 364. [Google Scholar] [CrossRef]
- Kalman, E.L.; Löfvendahl, A.; Winquist, F.; Lundström, I. Classification of complex gas mixtures from automotive leather using an electronic nose. Anal. Chim. Acta 2000, 403, 31–38. [Google Scholar] [CrossRef]
- Imahashi, M.; Miyagi, K.; Takamizawa, T.; Hayashi, K. Artificial odor map and discrimination of odorants using the odor separating system. AIP Conf. Proc. 2011, 1362, 27–28. [Google Scholar]
- Liu, H.; Meng, G.; Deng, Z.; Li, M.; Chang, J.; Dai, T.; Fang, X. Progress in research on VOC molecule recognition by semiconductor sensors. Acta Phys.-Chim. Sin. 2020, 38, 2008018. [Google Scholar] [CrossRef]
- Rahman, S.; Alwadie, A.S.; Irfan, M.; Nawaz, R.; Raza, M.; Javed, E.; Awais, M. Wireless E-Nose Sensors to Detect Volatile Organic Gases through Multivariate Analysis. Micromachines 2020, 11, 597. [Google Scholar] [CrossRef]
- Travis, B.; Dubey, M.; Sauer, J. Neural networks to locate and quantify fugitive natural gas leaks for a MIR detection system. Atmos. Environ. 2020, 8, 100092. [Google Scholar] [CrossRef]
- Pérez-Pérez, E.J.; López-Estrada, F.R.; Valencia-Palomo, G.; Torres, L.; Puig, V.; Mina-Antonio, J.D. Leak Diagnosis in Pipelines Using a Combined Artificial Neural Network Approach. Control Eng. Pract. 2021, 107, 104677. [Google Scholar] [CrossRef]
- Zhang, J.; Xue, Y.; Zhang, T.; Chen, Y.; Wei, X.; Wan, H.; Wang, P. Detection of Hazardous Gas Mixtures in the Smart Kitchen Using an Electronic Nose with Support Vector Machine. J. Electrochem. Soc. 2020, 167, 147519. [Google Scholar] [CrossRef]
- Manjula, R.; Narasamma, B.; Shruthi, G.; Nagarathna, K.; Kumar, G. Artificial Olfaction for Detection and Classification of Gases Using E-Nose and Machine Learning for Industrial Application. In Machine Intelligence and Data Analytics for Sustainable Future Smart Cities; Springer: Berlin/Heidelberg, Germany, 2021; pp. 35–48. [Google Scholar]
- Ragila, V.V.; Madhavan, R.; Kumar, U.S. Neural Network-Based Classification of Toxic Gases for a Sensor Array. In Sustainable Communication Networks and Application; Springer: Berlin/Heidelberg, Germany, 2021; pp. 373–383. [Google Scholar]
- Sharabiani, V.R.; Khorramifar, A.; Karami, H.; Lozano, J.; Tabor, S.; Darvishi, Y.; Gancarz, M. Non-destructive test to detect adulteration of rice using gas sensors coupled with chemometrics methods. Int. Agrophysics 2023, 37, 235–244. [Google Scholar] [CrossRef] [PubMed]
- Viciano-Tudela, S.; Sendra, S.; Parra, L.; Jimenez, J.M.; Lloret, J. Proposal of a Gas Sensor-Based Device for Detecting Adulteration in Essential Oil of Cistus ladanifer. Sustainability 2023, 15, 3357. [Google Scholar] [CrossRef]
- Peng, P.; Zhao, X.; Pan, X.; Ye, W. Gas Classification Using Deep Convolutional Neural Networks. Sensors 2018, 18, 157. [Google Scholar] [CrossRef]
- Spandonidis, C.; Theodoropoulos, P.; Giannopoulos, F.; Galiatsatos, N.; Petsa, A. Evaluation of Deep Learning Approaches for Oil & Gas Pipeline Leak Detection Using Wireless Sensor Networks. Eng. Appl. Artif. Intell. 2022, 113, 104890. [Google Scholar]
- Pan, X.; Zhang, H.; Ye, W.; Bermak, A.; Zhao, X. A Fast and Robust Gas Recognition Algorithm Based on Hybrid Convolutional and Recurrent Neural Network. IEEE Access 2019, 7, 100954–100963. [Google Scholar] [CrossRef]
- Liu, Q.; Hu, X.; Ye, M.; Cheng, X.; Li, F. Gas Recognition under Sensor Drift by Using Deep Learning. Int. J. Intell. Syst. 2015, 30, 907–922. [Google Scholar] [CrossRef]
- Arduino Nano. Available online: https://docs.arduino.cc/hardware/nano (accessed on 3 January 2024).
- All About MQ Series Gas Sensor. Available online: https://robocraze.com/blogs/post/mq-series-gas-sensor (accessed on 3 January 2024).
- Chang, I.S.; Byun, S.W.; Lim, T.B.; Park, G.M. A Study of Drift Effect in a Popular Metal Oxide Sensor and Gas Recognition Using Public Gas Datasets. IEEE Access 2023, 11, 26383–26392. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Advice | Other |
|---|---|---|
| Benzene | Inhaling benzene can lead to drowsiness, dizziness, and loss of consciousness, while prolonged exposure to benzene can affect the bone marrow, leading to anemia and leukemia. | It is recommended to use just one or two drops in the Petri dish. |
| Toluene | Excessive inhalation may result in functional disorders such as abdominal pain and vomiting, or neurological disorders such as headaches and hallucinations. | |
| Ammonia | When exposed to high levels of ammonia, it is rapidly absorbed by the mucous membranes, destroying cellular tissue to a lethal level. | It is recommended to use ammonium hydroxide, which is diluted with water. |
| Acetone | It can be harmful if inhaled into the airway, and long or repeated exposure can damage blood in the body. | Relatively safe. |
| Ethanol | Ethanol is used to disinfect non-human medical equipment, such as hand disinfection, without wounds. | Relatively safe. |
| Model | Accuracy | Training Time |
|---|---|---|
| Bayesian | 91.8% | 1 s |
| SVM | 95.3% | 4 s |
| Linear Regression | 95.1% | 1 s |
| Fully Connected Model | 97.2% | About 5 min (3000 epochs) |
| LSTM [31] | 96.3% | About 7 min (3000 epochs) |
| Bidirectional LSTM [36] | 97.2% | About 8 min (3000 epochs) |
| 1D CNN + LSTM [36] | 98.4% | About 20 min (10,000 epochs) |
| Temporal CNN [36] | 91.2% | About 20 min (10,000 epochs) |
| AdaBoost | 98.1% | 0.14 s |
| Gradient Boosting | 99.2% | 3.44 s |
| XGBoost | 99.6% | 0.23 s |
| Model | Accuracy | Training Time |
|---|---|---|
| Bayesian | 85% | 1 s |
| SVM | 97% | 4 s |
| Linear Regression | 85% | 1 s |
| Fully Connected Model | 87% | About 10 s |
| LSTM [31] | 89% | About 30 s |
| Bidirectional LSTM [36] | 96% | About 1 min |
| 1D CNN + LSTM [36] | 99% | About 5 min |
| Temporal CNN [36] | 98.2% | About 5 min |
| AdaBoost | 96% | 0.3 s |
| Gradient Boosting | 99% | 5 s |
| XGBoost | 99% | 0.4 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, I.-S.; Byun, S.-W.; Lim, T.-B.; Park, G.-M. A Study on E-Nose System in Terms of the Learning Efficiency and Accuracy of Boosting Approaches. Sensors 2024, 24, 302. https://doi.org/10.3390/s24010302
Chang I-S, Byun S-W, Lim T-B, Park G-M. A Study on E-Nose System in Terms of the Learning Efficiency and Accuracy of Boosting Approaches. Sensors. 2024; 24(1):302. https://doi.org/10.3390/s24010302
Chicago/Turabian StyleChang, Il-Sik, Sung-Woo Byun, Tae-Beom Lim, and Goo-Man Park. 2024. "A Study on E-Nose System in Terms of the Learning Efficiency and Accuracy of Boosting Approaches" Sensors 24, no. 1: 302. https://doi.org/10.3390/s24010302
APA StyleChang, I.-S., Byun, S.-W., Lim, T.-B., & Park, G.-M. (2024). A Study on E-Nose System in Terms of the Learning Efficiency and Accuracy of Boosting Approaches. Sensors, 24(1), 302. https://doi.org/10.3390/s24010302