
Development and Analysis of a Distributed Leak Detection and Localisation System for Crude Oil Pipelines


Abstract
1. Introduction
- A combination of existing LDTs to optimise their strengths and minimise their weaknesses while ensuring the continuous and accurate DAL of leakages.
- A presentation of the node placement strategy, which allows sensitivity in leakage DAL and elimination of SPOFs.
- An analysis of the efficiency of HyDiLLEch, considering the resilience to SPOFs, the accuracy of leakage DAL, the communication overhead, and energy consumption.
2. Related Works
2.1. Pipeline Failure Detection and Localisation Techniques
2.2. WSN/IoT-Based Pipeline Monitoring
3. Computational Fluid Mechanics
3.1. Real-Time Transient Model
3.2. Mass Volume Balance
3.3. Pressure Point Analysis (PPA)
3.4. Gradient-Based Method (GM)
3.5. Negative Pressure Wave Method (NPWM)
4. Contributions
- Resilience: Remove the SPOF.
- Coverage and sensitivity: Allow optimal connections between the sensors and determine small-sized leaks.
- Accuracy: Ensure high accuracy in DAL.
- Energy efficiency: Minimise energy consumption without compromising accuracy.
4.1. Design Consideration and Specification
4.1.1. Architectural Design
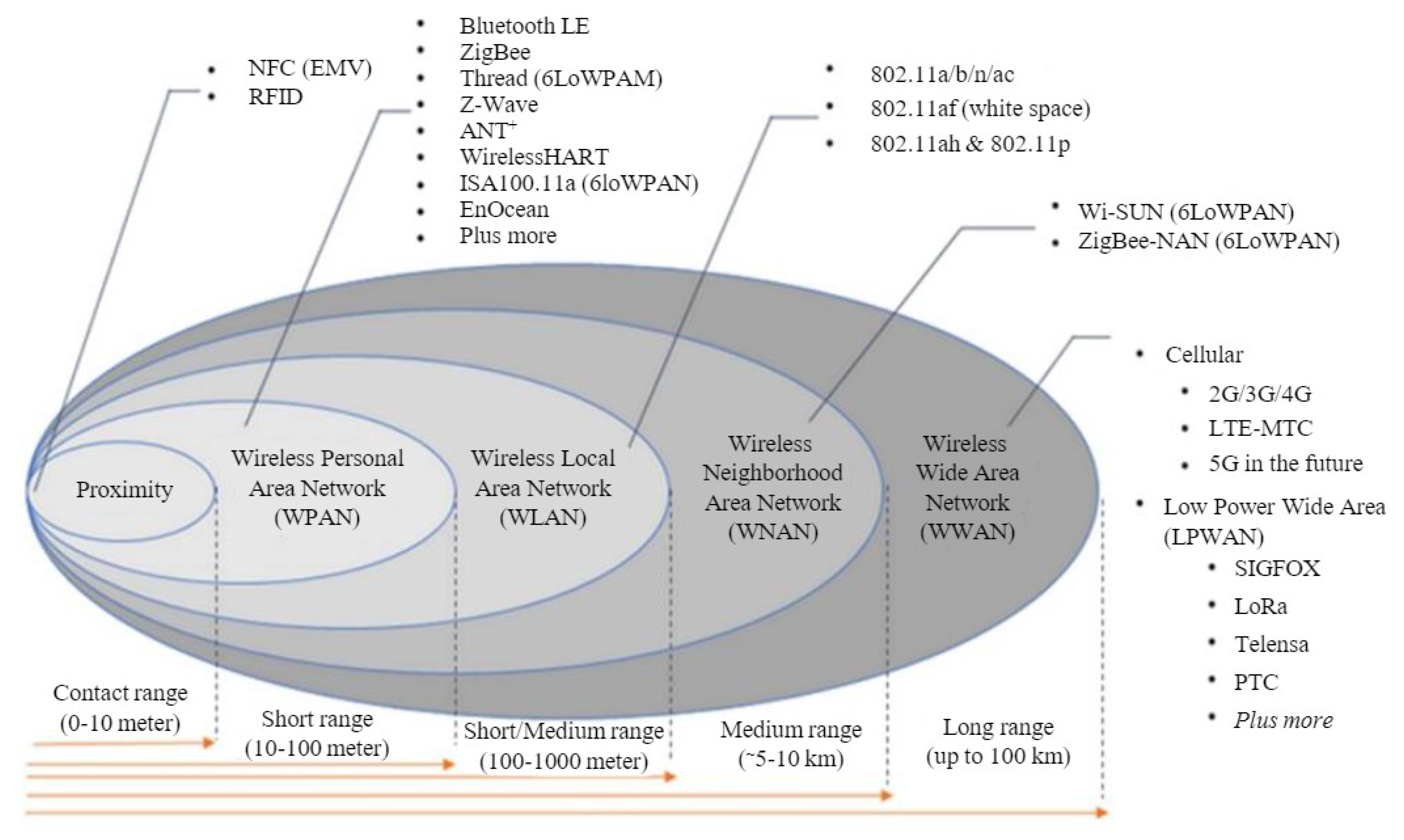
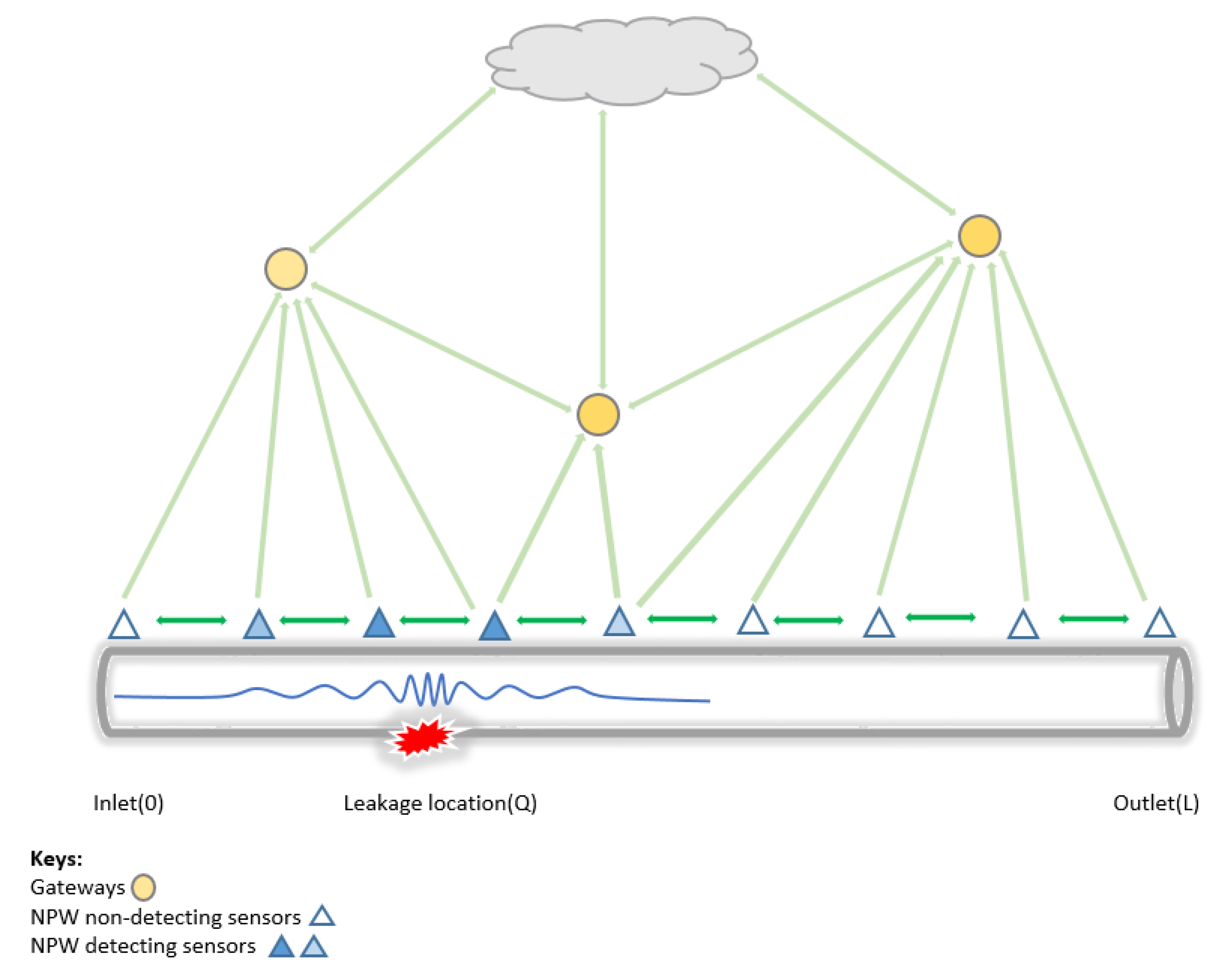
4.1.2. Communication and Network Coverage
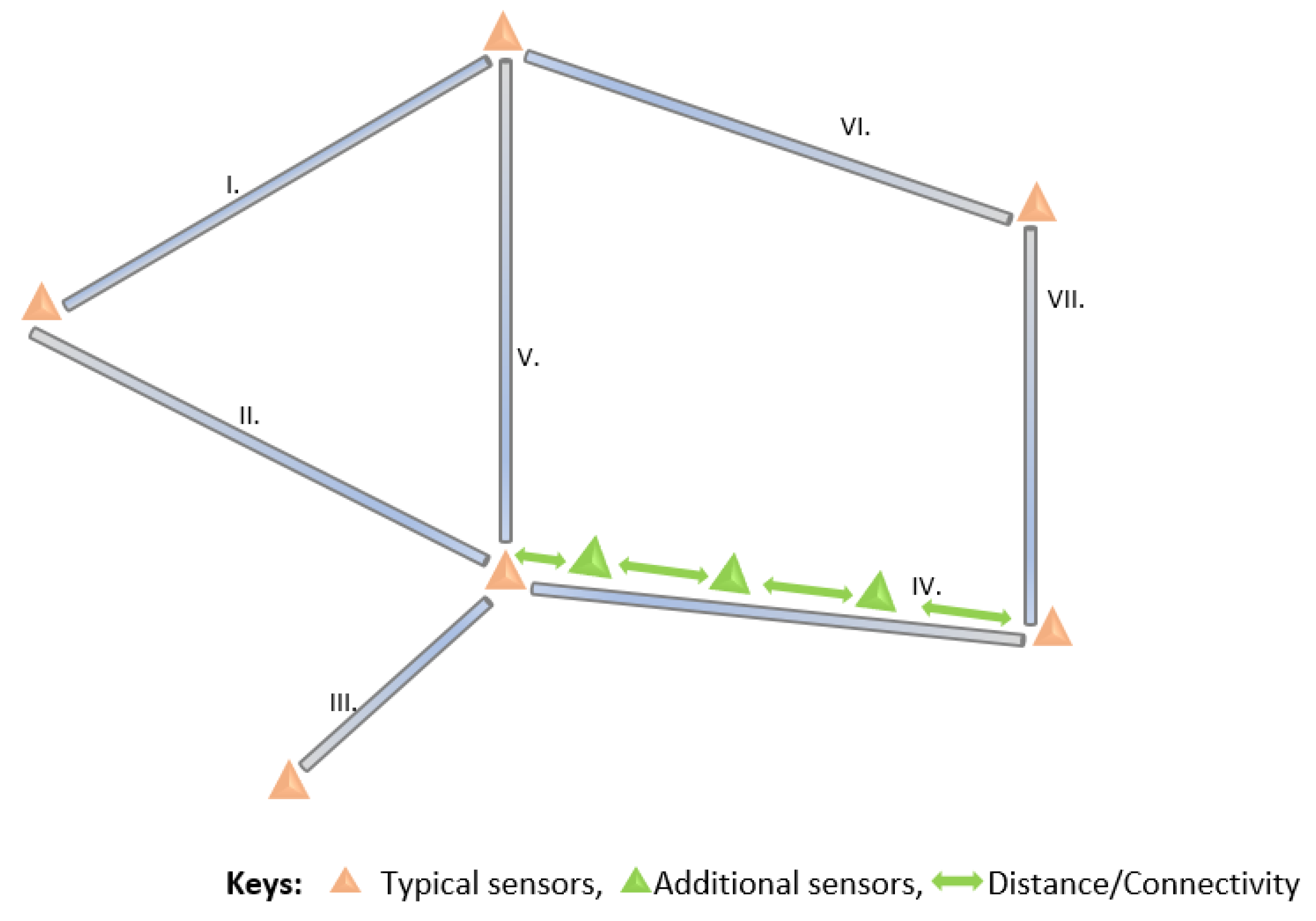
4.1.3. Sensor Placement for Event Coverage
- The distance (D) between nodes should be less than half of their maximum communication range of the sensor () to ensure interconnectivity, data sharing, and resilience to SPOFs.
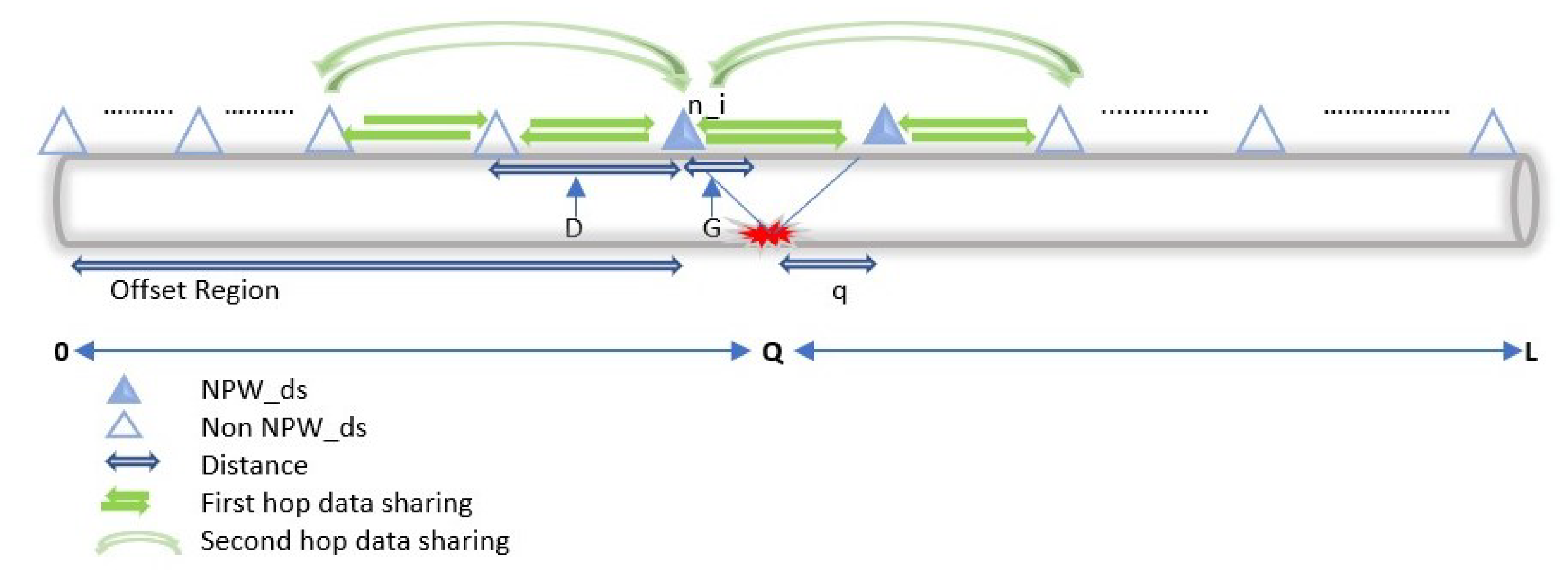
- The maximum detecting distance of the NPW (, which will be experimentally determined) between nodes and the event source must be adequately small to guarantee sensitivity to small-sized leaks.where D is the distance obtained in Equation (7)With Equation (8), the distance (D) between the nodes, should be less than the between the upstream and downstream nodes surrounding a leakage, allowing the detectability of the NPW travelling in both directions.
- Finally, there should be at least three sensors from the total number of sensors deployed (N) that can detect the NPW front. Note that in an ideal case, both upstream and downstream nodes are enough to detect the arrival of the NPW front. However, to remove SPOFs as described at the beginning of this subsection, we add a redundancy of one node. This ensures the continuous DAL of leakages in the presence of node failure.where and dist(, Q) is the distance between node i and the leak location Q.
4.2. Hybrid Distributed Leakage Detection and Localisation Technique (HyDiLLEch)
4.2.1. 3-Factor Leakage Detection
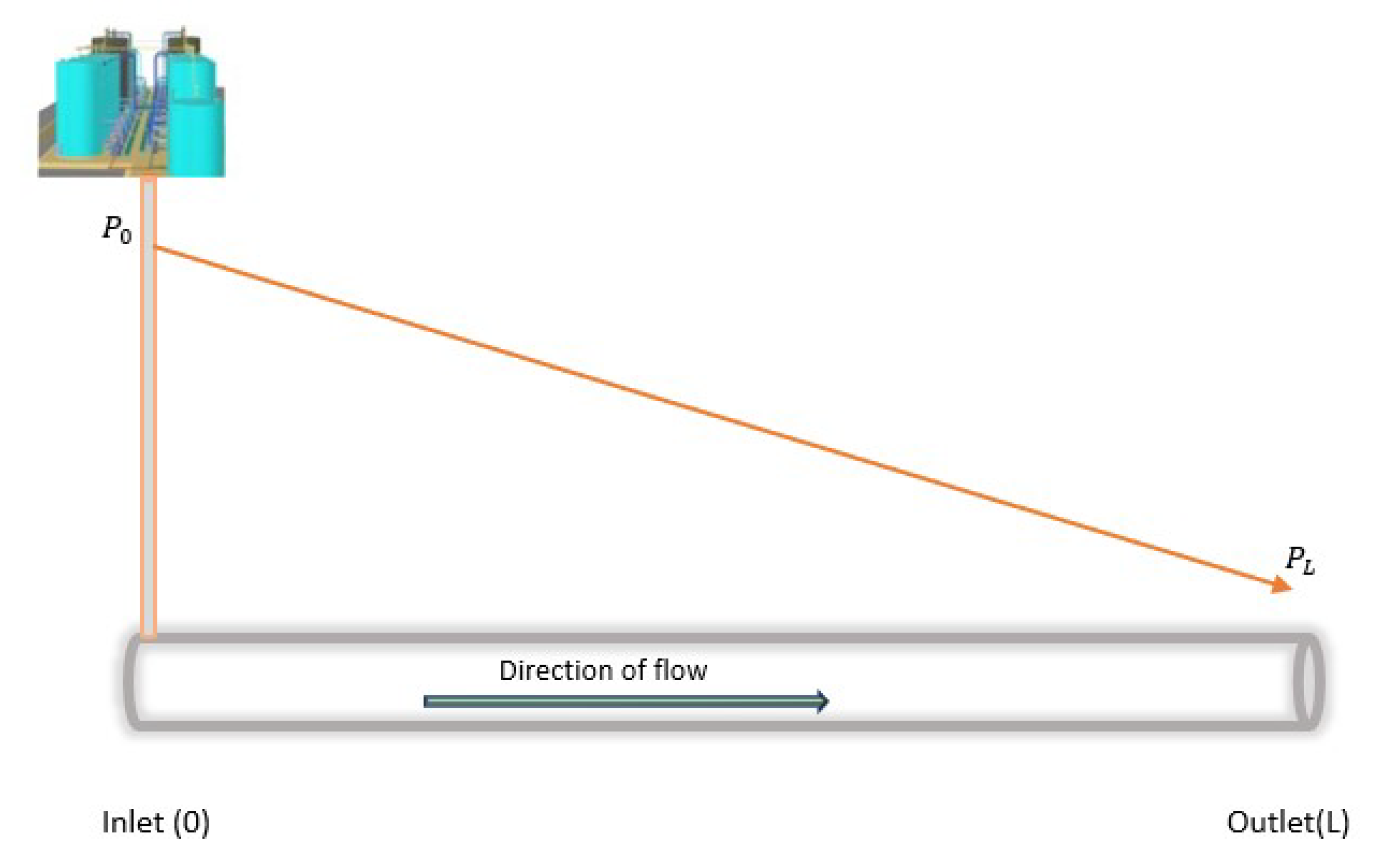
- Defining the pressure threshold: HyDiLLEch begins by utilising the PPA LDT to pre-estimate the expected pressure at every node location in the pipeline. To determine the expected pressure, the elevation parameter (z) defined in Equation (2) is set to 0, with respect to the horizontal nature of the pipeline.Then, we calculate the PG to estimate the expected pressure at every sensor point by rewriting Equation (2) as follows:where is the pressure gradient on a horizontal pipeline, i.e., elevation with length L, () is the inlet pressure, () is the outlet pressure, is the fluid density, and g is the gravitational force.Once we determine the PG in a steady state, a threshold is set to accommodate the difference in the value read from the sensor and potential calibration error from the sensor readings. This threshold is set utilising the industrial permissible standard [14]. With this, the comparison between the actual sensor reading and the obtained value from the pre-estimation with Equation (10) is done. A difference greater than the threshold indicates possible leakage occurrence.
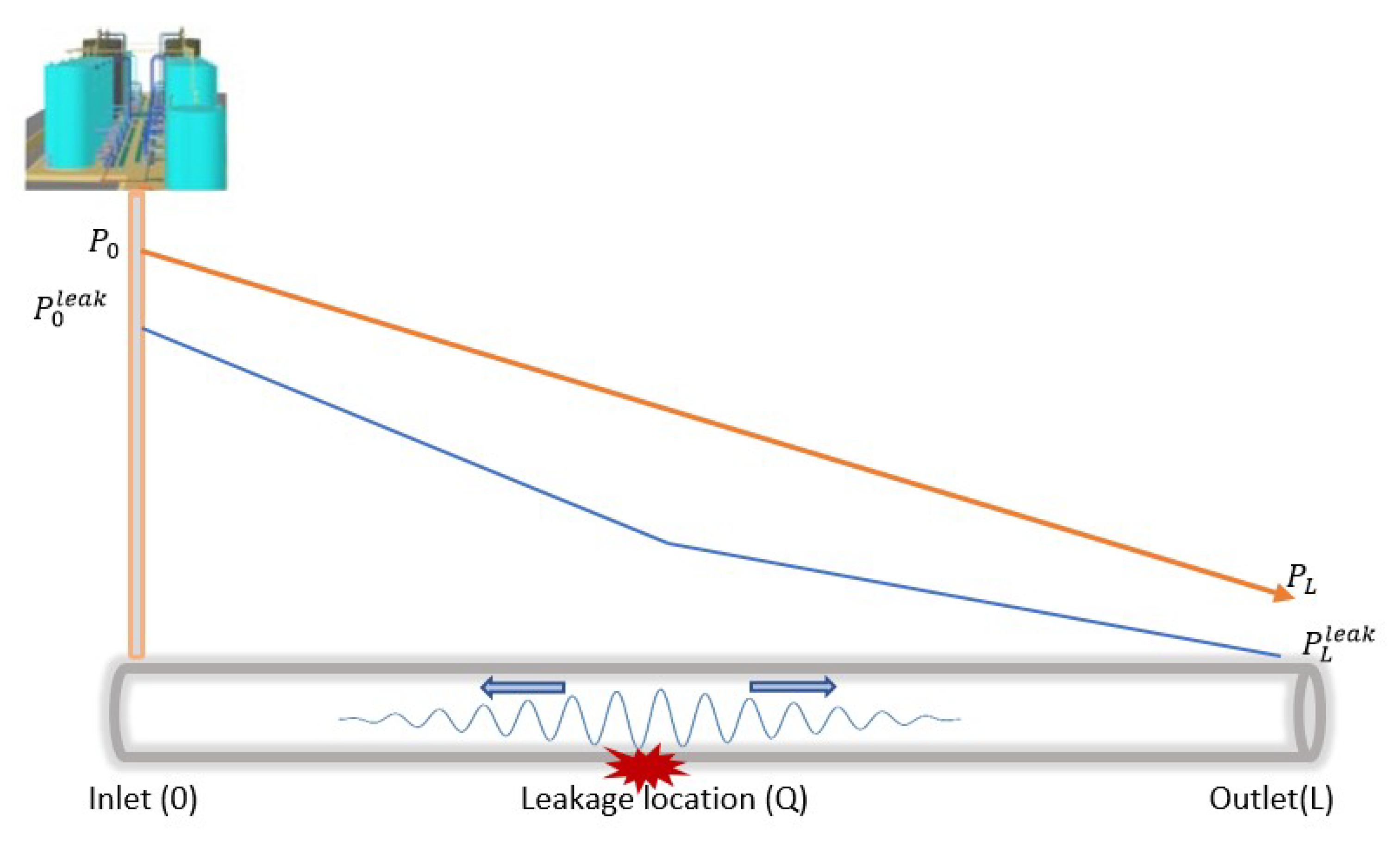
- Difference in the pressure gradient: The second step in the detection phase is to check the presence of the two PGs that must be present when leakage occurs, i.e., based on the fluid dynamic properties discussed in Section 3. Assuming a leakage point Q as shown in Figure 11, the two PGs are those formed between and . Both PGs, i.e., and must be present and must respect the following conditions:
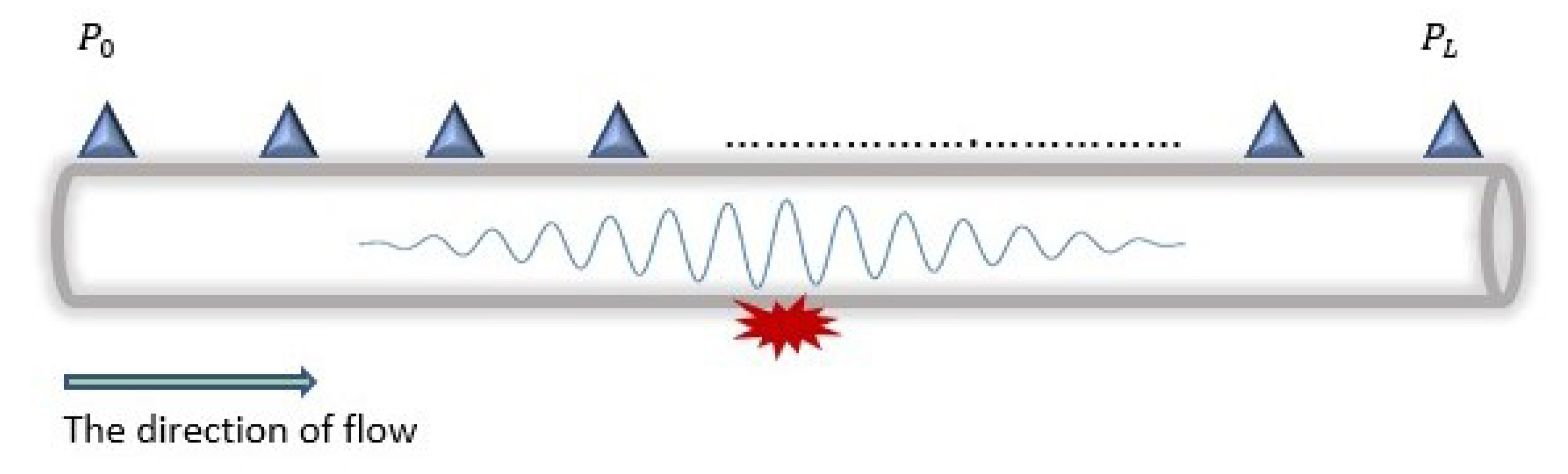
- Arrival of the negative pressure wave: As discussed in Section 3, all leakages must generate an NPW in the pipeline detectable by only a few sensors; the number varies based on the leak size. These sensors are noted as in Figure 11 and are located around the areas where the pressure gradient is formed.The placements of these sensors (as we will see later in Section 5) are such that small leakages are detectable. Hence, the final step in the detection phase is to ensure the presence of the . In addition, for the arrival to be considered a positive detection, at least two (upstream and downstream) sensor nodes must detect the wavefront. This condition is centred on the waves travelling in opposite directions from a leakage point. Thus, we eliminate false positives by coupling the leakage detection to the arrival of the wavefront.Finally, the actual presence of a leak is confirmed following the enumerated factors. Then, the leakage localisation is estimated using a similar approach, discussed in the following subsection.
4.2.2. Two-Factor Leakage Localisation
| Algorithm 1 HyDiLLEch (Single-Hop) |
|
| Algorithm 2 HyDiLLEch (Double-Hop) |
|
5. Simulation Results
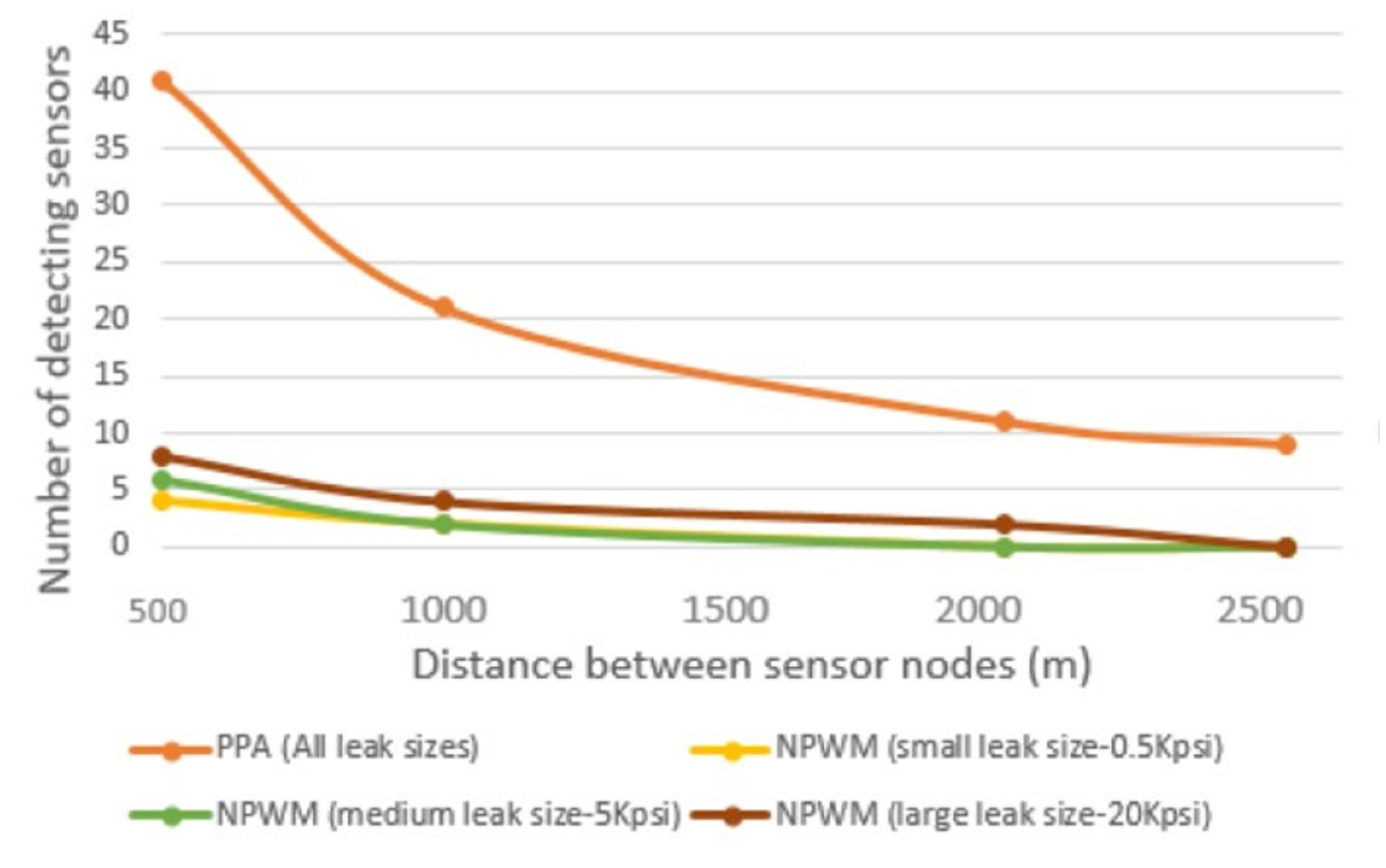
5.1. Node Placement and Sensitivity to Small Leakages
5.2. Detection and Localisation Accuracy
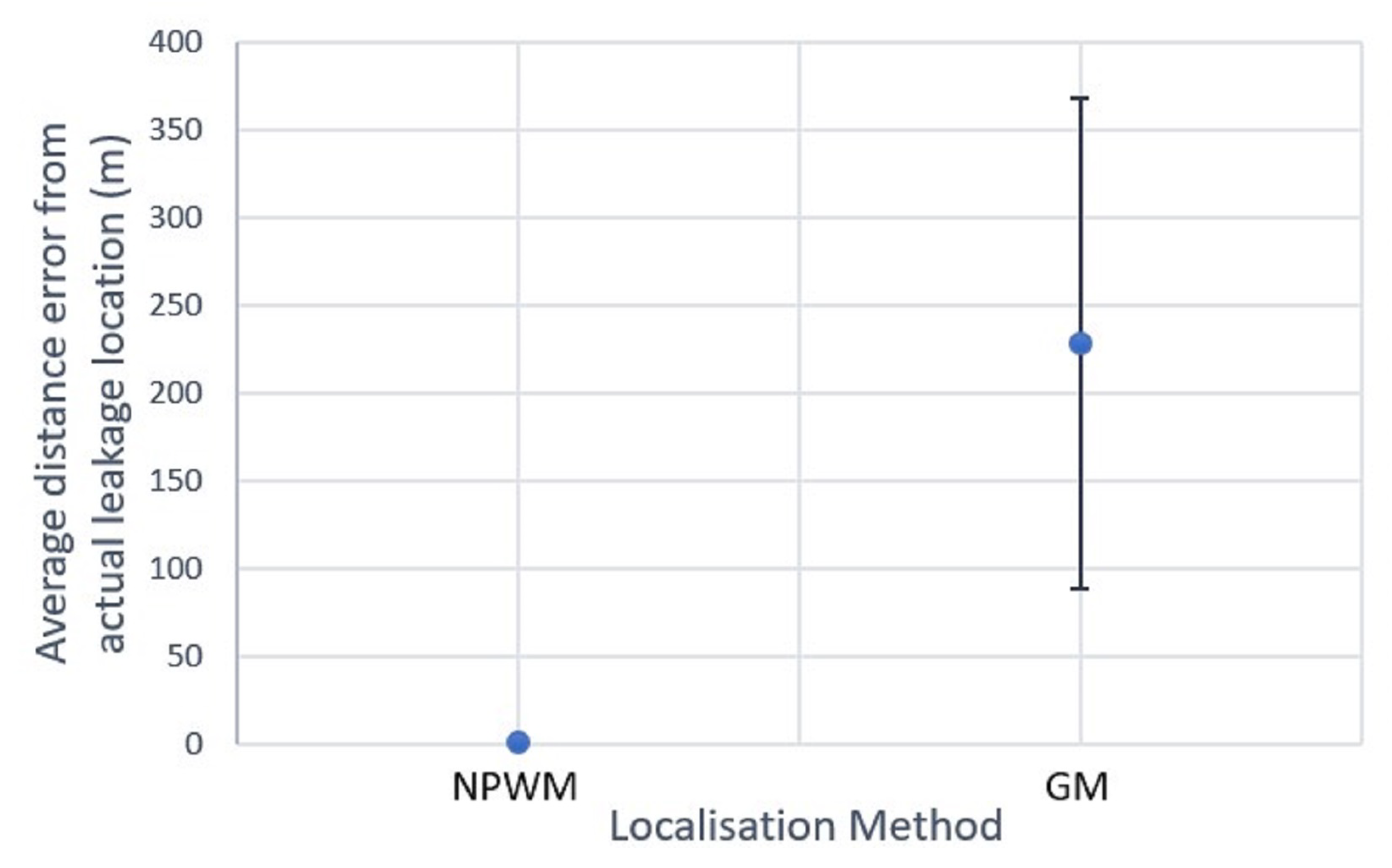
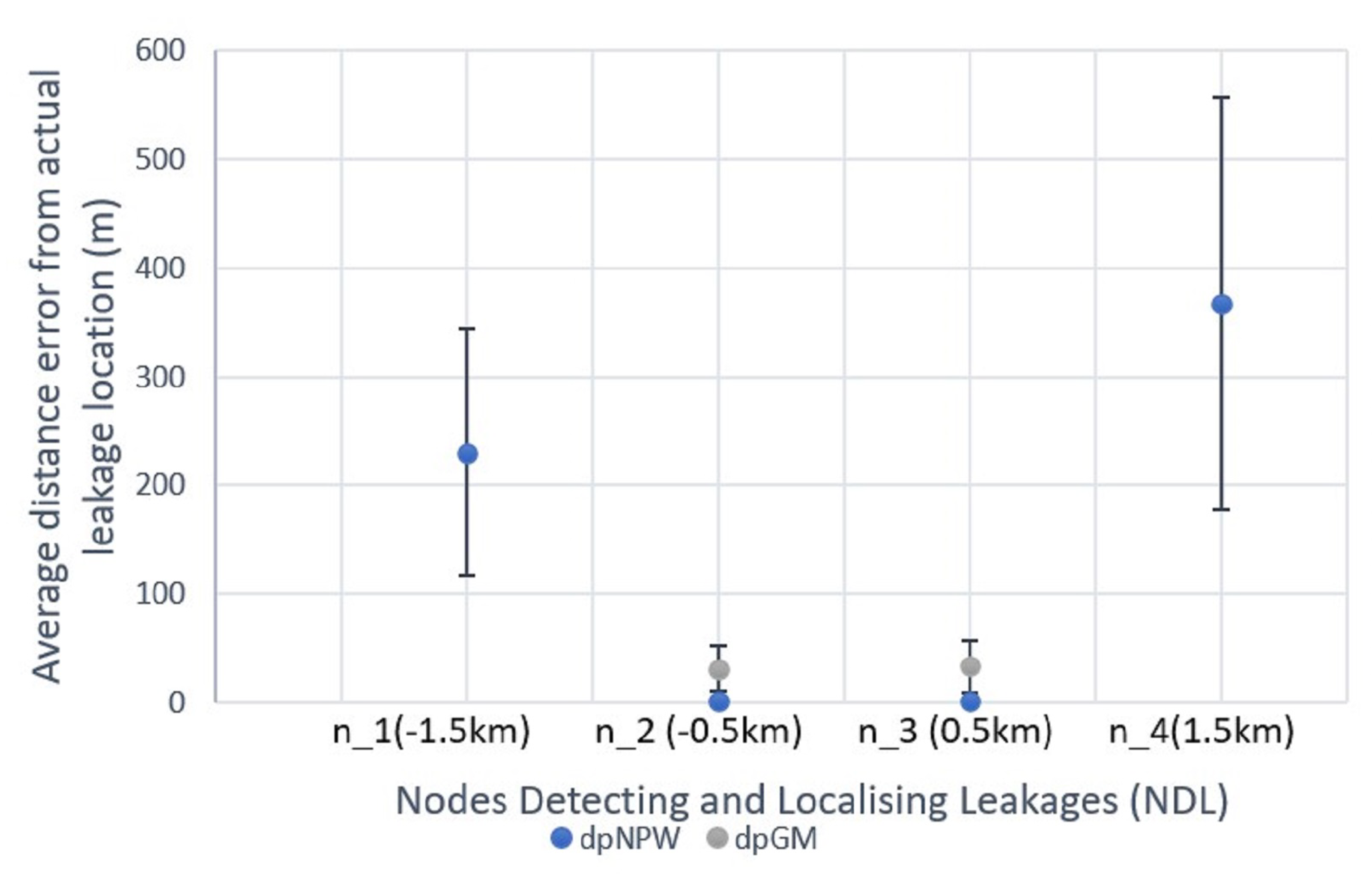
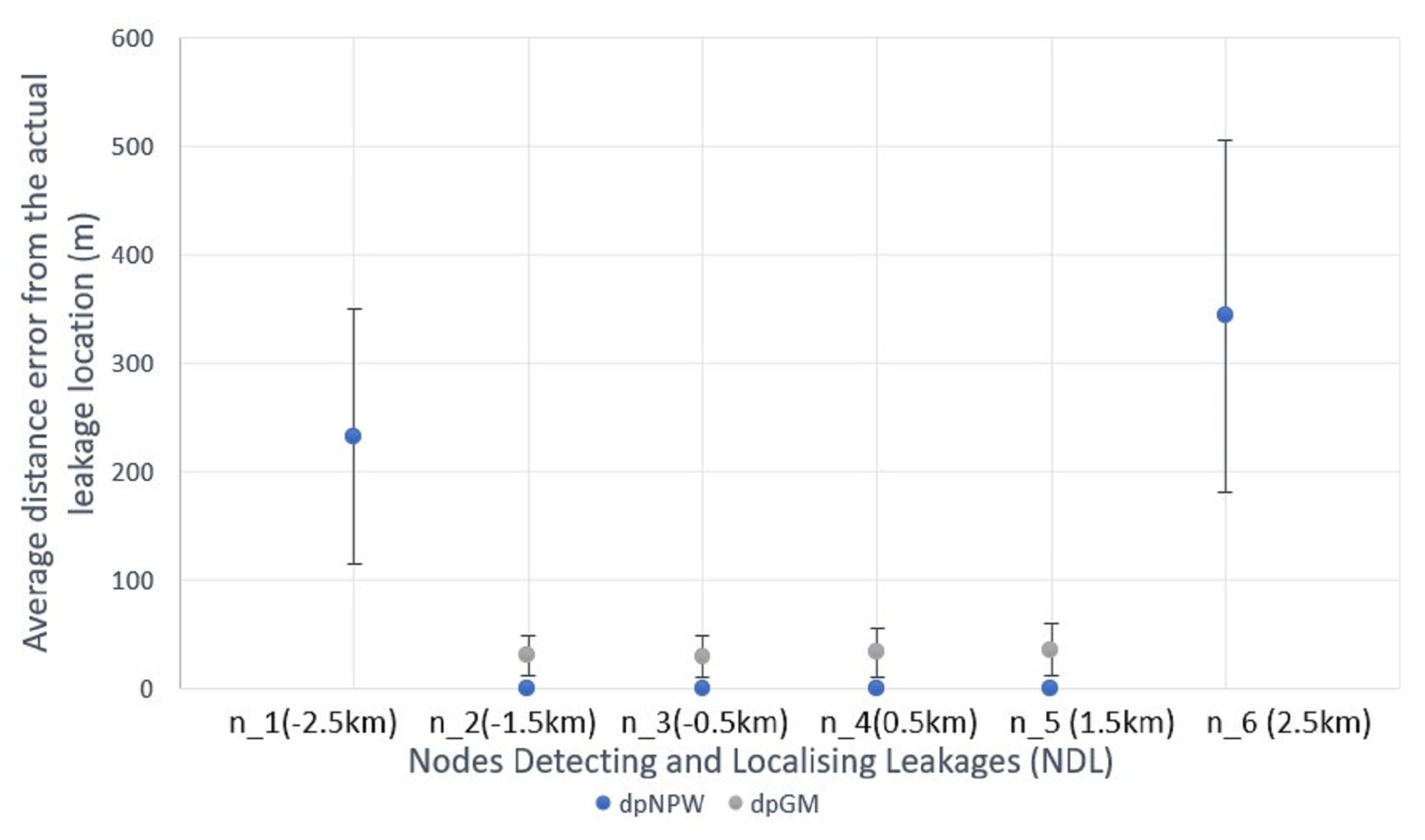
5.2.1. Classical Approach
5.2.2. HyDiLLEch
5.3. Communication Efficiency
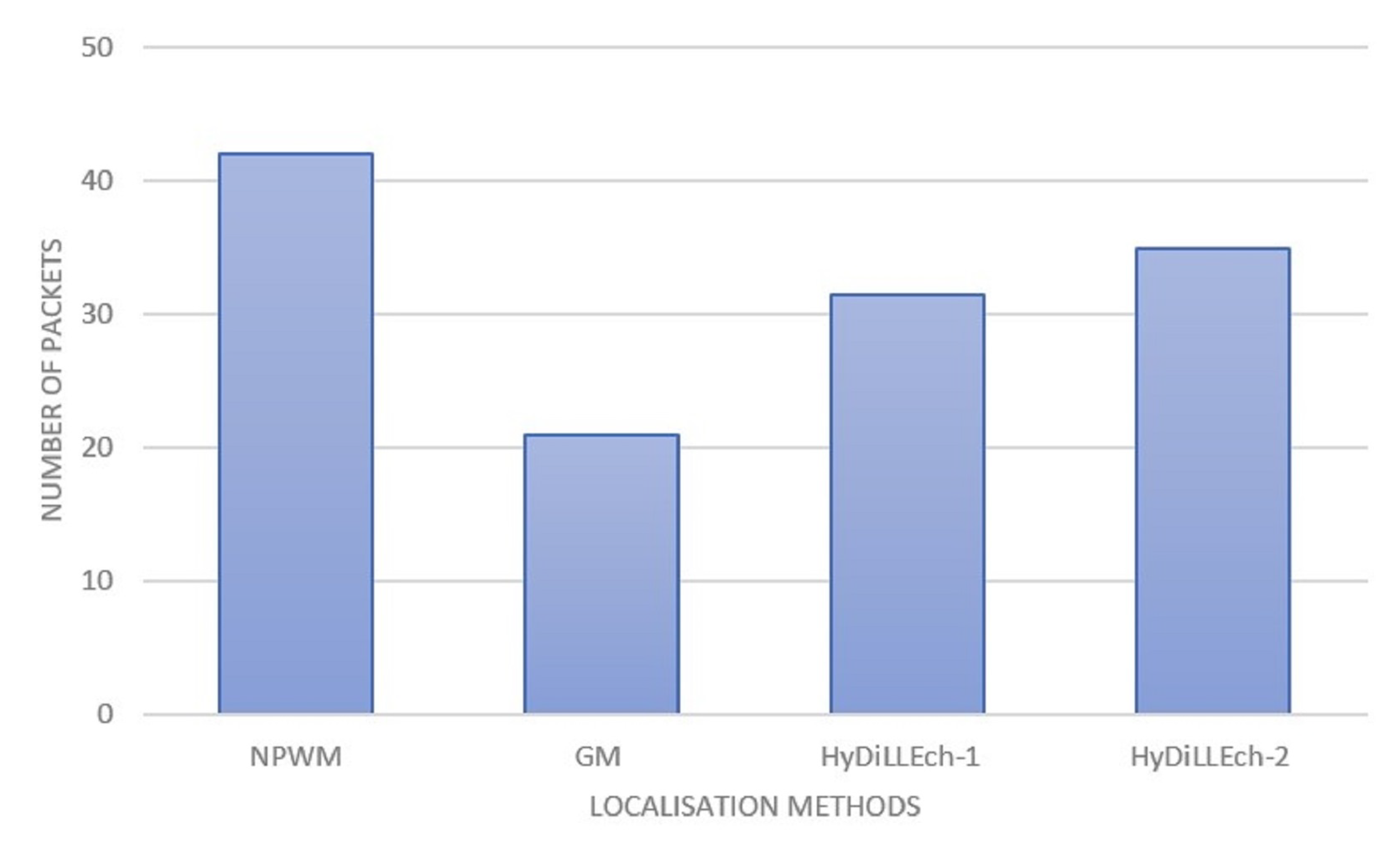
5.3.1. Communication Overhead
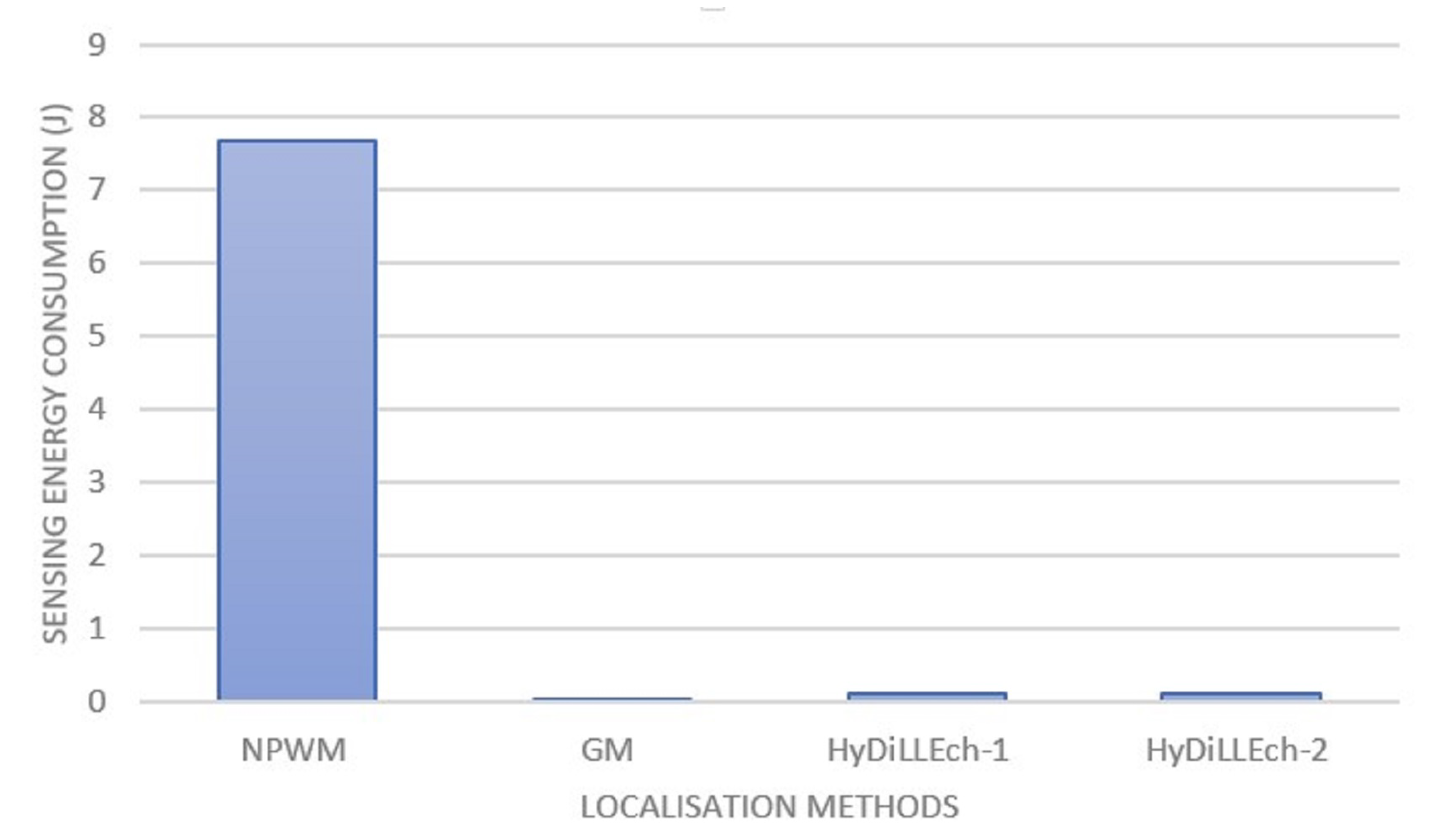
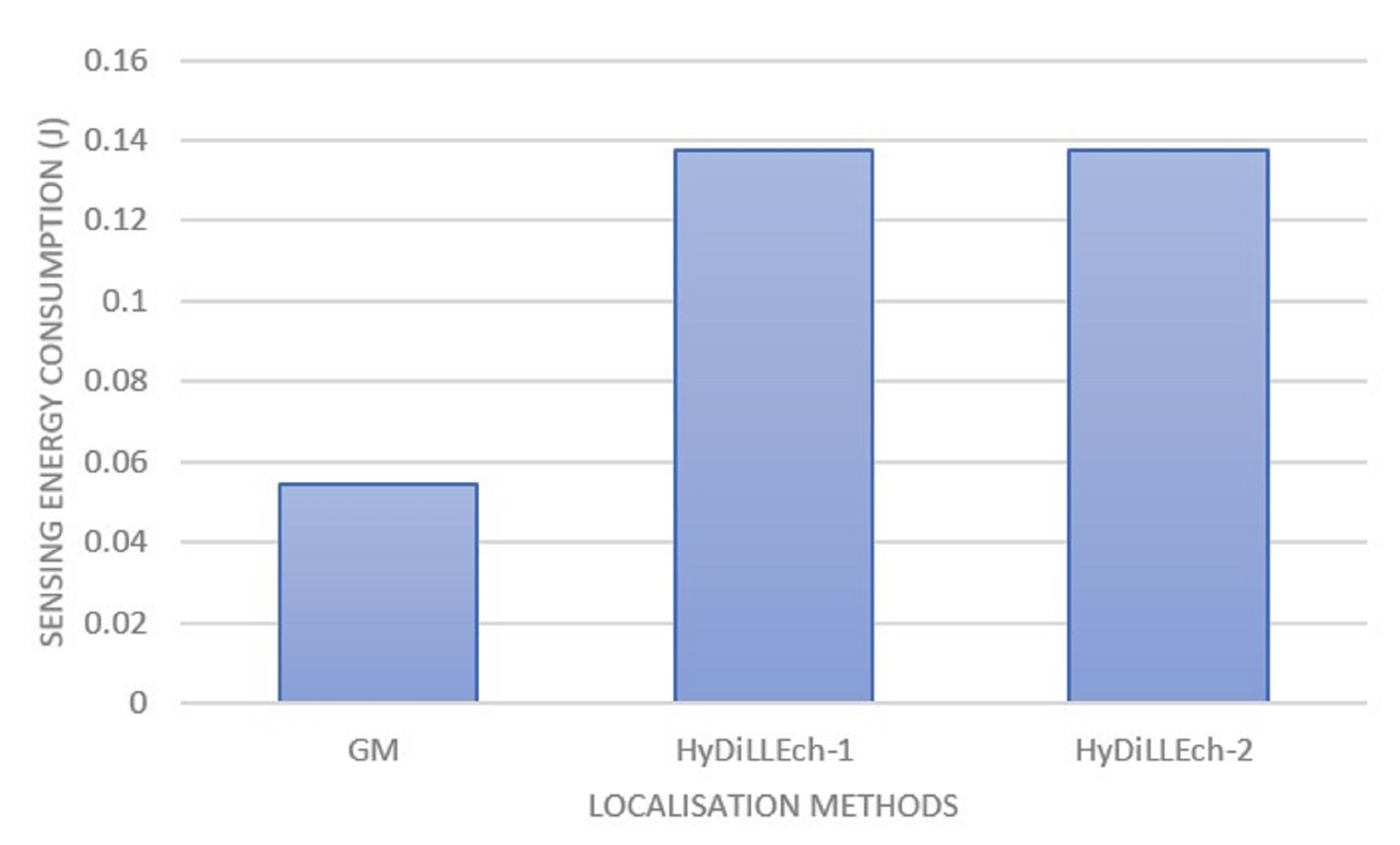
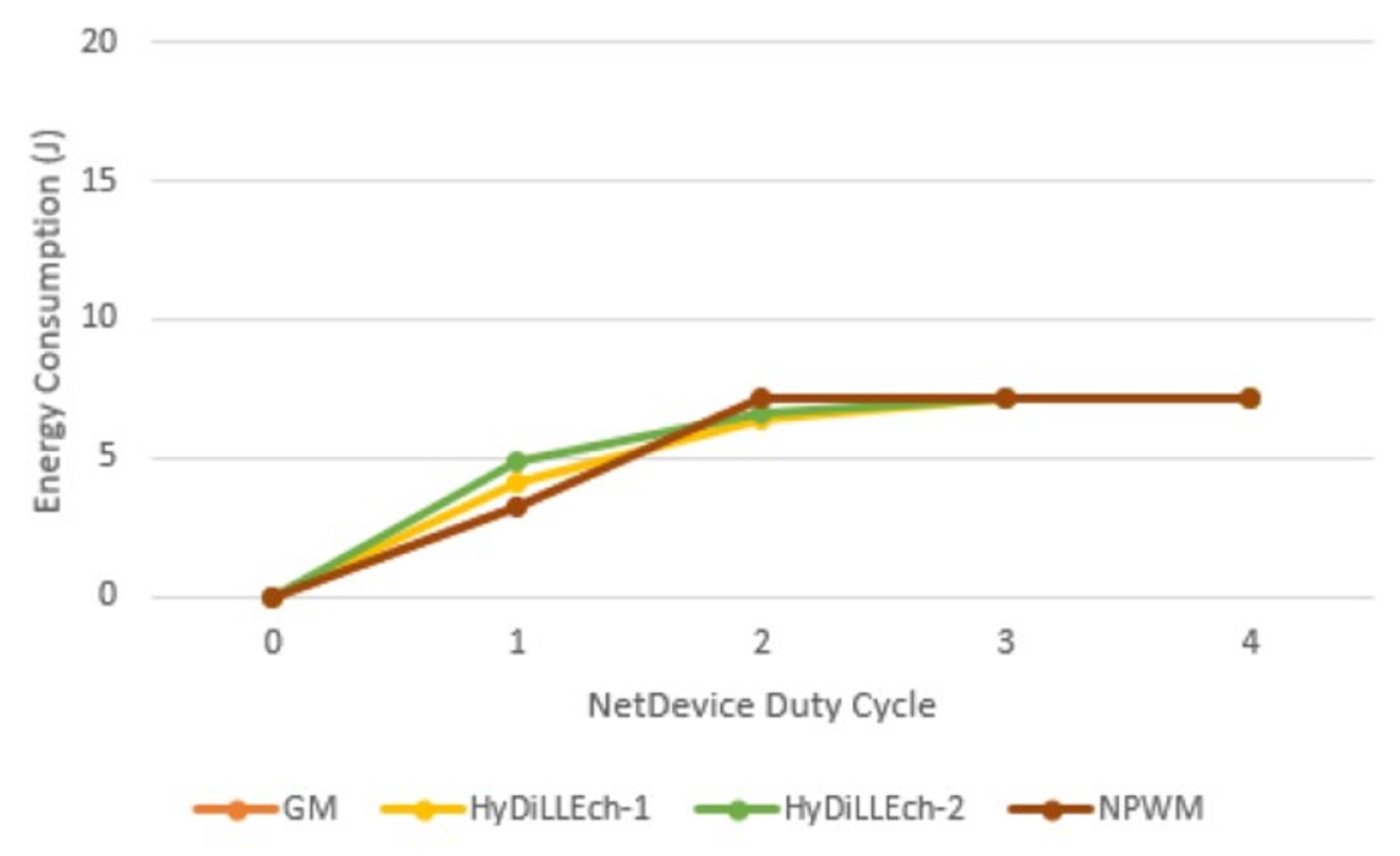
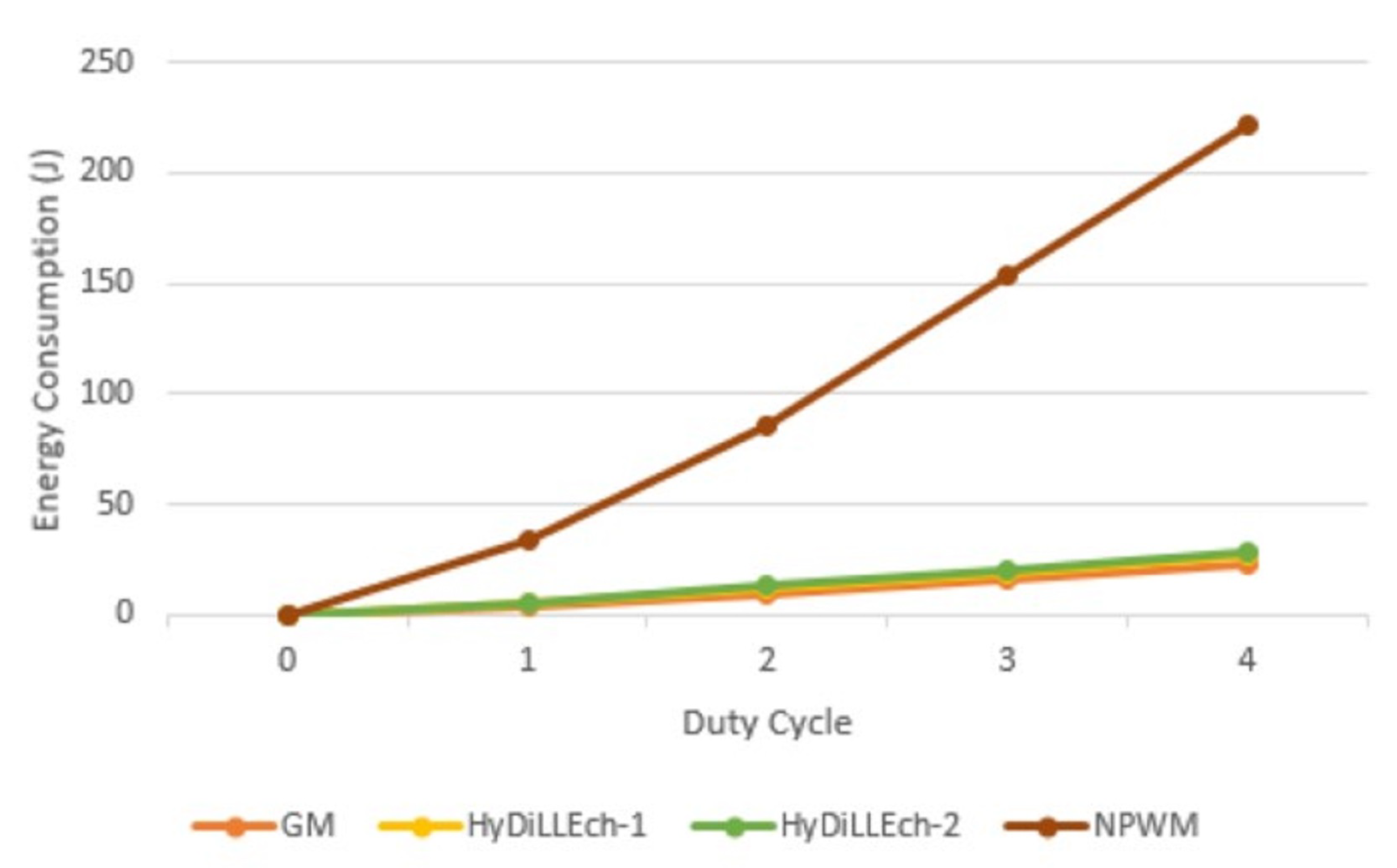
5.3.2. Energy Consumption
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
List of Acronyms/Abbreviations
| 3GPP | 3rd Generation Partnership Project |
| BLE | Bluetooth Low Energy |
| CFD | Computational Fluid Dynamics |
| DAL | Detection and Localisation |
| GA | Greedy Approximation |
| GM | Gradient-based Method |
| HyDiLLEch | Hybrid Distributed Leakage Detection and Localisation Technique |
| IoT | Internet of Things |
| LDMS | Leak Detection and Monitoring System |
| LDT | Leakage Detection Technique |
| LoRaWAN | Long Range Wide Area Network |
| LPWAN | Low Power Wide Area Network |
| MIO | Mixed Integer Optimisation |
| MIP | Mixed Integer Programming |
| MTC | Minimum Test Cover |
| NB-IoT | Narrowband Internet of Things |
| NDL | Nodes Detecting and Localising Leakages |
| NPW | Negative Pressure Wave |
| Negative Pressure Wave Detecting Sensor | |
| Negative Pressure Wave Maximum Detecting Distance | |
| NPWM | Negative Pressure Wave Method |
| OGI | Oil and Gas Industry |
| OLS | Oil Leakages and Spills |
| PG | Pressure Gradient |
| PIG | Pipeline Inspection Gauges |
| POD | Place of Deployment |
| PPA | Pressure Point Analysis |
| RFID | Radio Frequency Identification |
| RGA | Robust Greedy Approximation |
| RMIO | Robust Mixed Integer Optimisation |
| SCADA | Supervisory Control and Data Acquisition |
| SPOF | Single Point of Failure |
| UAV | Unmanned Aerial Vehicles |
| WSN | Wireless Sensor Networks |
References
- Ambituuni, A.; Hopkins, P.; Amezaga, J.; Werner, D.; Wood, J. Risk Assessment of a Petroleum Product Pipeline in Nigeria: The Realities of Managing Problems of Theft/Sabotage. In Safety and Security Engineering; Brebia, C., Garzia, F., Poljak, D., Eds.; WIT Transactions on the Built Environment; WIT Press: Southampton, UK, 2015; Volume VI, pp. 49–50. [Google Scholar] [CrossRef]
- Rashid, S.; Akram, U.; Qaisar, S.; Khan, S.A.; Felemban, E. Wireless Sensor Network for Distributed Event Detection Based on Machine Learning. In Proceedings of the 2014 IEEE International Conference on Internet of Things (iThings), and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom), Taipei, Taiwan, 1–3 September 2014; pp. 540–545. [Google Scholar] [CrossRef]
- PHMSA. Pipeline Failure Causes; Technical Report; U.S. Department of Transportation: Washington, DC, USA, 2019.
- Slaughter, A.; Bean, G.; Mittal, A. Connected Barrels: Transforming Oil and Gas Strategies with the Internet of Things; Technical Report; Deloitte Center for Energy Solutions: London, UK, 2015. [Google Scholar]
- Sheltami, T.R.; Bala, A.; Shakshuki, E.M. Wireless sensor networks for leak detection in pipelines: A survey. J. Ambient Intell. Humanised Comput. 2016, 7, 347–356. [Google Scholar] [CrossRef]
- SPDCN. Security, Theft, Sabotage and Spills; Technical Report; Shell Petroleum Development Company of Nigeria Limited: Abuja, Nigeria, 2017. [Google Scholar]
- Khan, W.Z.; Aalsalem, M.Y.; Khan, M.K.; Hossain, M.S.; Atiquzzaman, M. A reliable Internet of Things based architecture for oil and gas industry. In Proceedings of the 19th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Republic of Korea, 19–22 February 2017; pp. 705–710. [Google Scholar] [CrossRef]
- Shoja, S.; Jalali, A. A study of the Internet of Things in the oil and gas industry. In Proceedings of the 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 22 December 2017; pp. 0230–0236. [Google Scholar] [CrossRef]
- Aalsalem, M.Y.; Khan, W.Z.; Gharibi, W.; Khan, M.K.; Arshad, Q. Wireless Sensor Networks in oil and gas industry: Recent advances, taxonomy, requirements, and open challenges. J. Netw. Comput. Appl. 2018, 113, 87–97. [Google Scholar] [CrossRef]
- Kim, J.; Sharma, G.; Boudriga, N.; Iyengar, S.S. SPAMMS: A sensor-based pipeline autonomous monitoring and maintenance system. In Proceedings of the 2010 Second International Conference on COMmunication Systems and NETworks (COMSNETS 2010), Bangalore, India, 5–9 January 2010; pp. 1–10. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Metje, N.; Chapman, D.N.; Anthony, C.J. SmartPipes: Smart Wireless Sensor Networks for Leak Detection in Water Pipelines. J. Sens. Actuator Netw. 2014, 3, 64–78. [Google Scholar] [CrossRef]
- Henry, N.F.; Henry, O.N. Wireless Sensor Networks based Pipeline Vandalisation and Oil Spillage Monitoring and Detection: Main Benefits for Nigeria Oil and Gas Sectors. SIJ Trans. Comput. Sci. Eng. Appl. 2015, 3, 1–6. [Google Scholar]
- Yu, H.; Guo, M. An efficient oil and gas pipeline monitoring systems based on wireless sensor networks. In Proceedings of the International Conference on Information Security and Intelligent Control, Yunlin, Taiwan, 14–16 August 2012; pp. 178–181. [Google Scholar] [CrossRef]
- Ostapkowicz, P. Leak detection in liquid transmission pipelines using simplified pressure analysis techniques employing a minimum of standard and non-standard measuring devices. Eng. Struct. 2016, 113, 194–205. [Google Scholar] [CrossRef]
- Ahmed, S.; Mouel, F.L.; Stouls, N. Resilient IoT-based Monitoring System for Crude Oil Pipelines. In Proceedings of the 7th International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Paris, France, 14–16 December 2020. [Google Scholar] [CrossRef]
- Ahmed, S.; Mouël, F.L.; Stouls, N.; Kouyi, G.L. HyDiLLEch: A WSN-based Distributed Leak Detection and Localisation in Crude Oil Pipelines. In Proceedings of the 45th International Conference on Advanced Information Networking and Applications (AINA-2020), Toronto, ON, Canada, 12–14 May 2021. [Google Scholar] [CrossRef]
- Ahmed, S. Resilient IoT-Based Monitoring System for the Nigerian Oil and Gas Industry. Ph.D. Thesis, Institut National des Sciences Appliquées (INSA De Lyon), Lyon, France, 2022. [Google Scholar]
- Na, S.Y.; Shin, D.; Kim, J.Y.; Baek, S.J.; Lee, B.H. Pipelines Monitoring System Using Bio-mimeticRobots. Int. J. Electr. Electron. Commun. Sci. 2009, 3, 508–514. [Google Scholar]
- Sujatha, R.; Hariprasad, P.P. Robot based Smart Water Pipeline Monitoring System. IOP Conf. Ser. Mater. Sci. Eng. 2020, 906, 012025. [Google Scholar] [CrossRef]
- Beushausen, R.; Tornow, S.; Borchers, H.; Murphy, K.; Zhang, D.J. Transient Leak Detection in Crude Oil Pipelines. In Proceedings of the International Pipeline Conference, Calgary, AB, Canada, 4–8 October 2004. [Google Scholar]
- Santos, A.; Younis, M. A sensor network for non-intrusive and efficient leak detection in long pipelines. In Proceedings of the 2011 IFIP Wireless Days (WD), Niagara Falls, ON, Canada, 10–12 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Karray, F.; Garcia-Ortiz, A.; Jmal, M.W.; Obeid, A.M.; Abid, M. EARNPIPE: A Testbed for Smart Water Pipeline Monitoring Using Wireless Sensor Network. Procedia Comput. Sci. 2016, 96, 285–294. [Google Scholar] [CrossRef]
- Kostianoy, A.; Solovyov, D. Operational satellite monitoring systems for marine oil and gas industry. In Proceedings of the 2010 Taiwan Water Industry Conference, Tainan, Taiwan, 28–29 October 2010; pp. 28–29. [Google Scholar]
- Kostianoy, A.G.; Lavrova, O.Y.; Mityagina, M.I.; Solovyov, D.M. Satellite monitoring of the Nord Stream gas pipeline construction in the Gulf of Finland. In Oil Pollution in the Baltic Sea; Springer: Berlin/Heidelberg, Germany, 2012; pp. 221–248. [Google Scholar]
- Kostianoy, A.; Bulycheva, E.; Semenov, A.; Krainyukov, A. Satellite monitoring systems for shipping and offshore oil and gas industry in the baltic sea. Transp. Telecommun. 2015, 16, 117. [Google Scholar] [CrossRef]
- Smith, A. Gas pipeline monitoring in Europe by satellite SAR. In Remote Sensing for Environmental Monitoring, GIS Applications, and Geology II; SPIE: Bellingham, WA, USA, 2003; Volume 4886, pp. 257–267. [Google Scholar]
- Dedikov, E.; Khrenov, N.; Lukyaschenko, V.; Salikhov, R.; Ponomarev, A.; Ovchinnikov, M.; Rodionov, I. The Russian small satellite for hyperspectral monitoring of gas pipelines. In Proceedings of the Digest of 3rd International Symposium International Academy of Astronautics, Berlin, Germany, 2–6 April 2001; pp. 235–239. [Google Scholar]
- Yunana, K.; Adewale, S.O.; Alfa, A.A.; Sanjay, M. An Exploratory Study of Techniques for Monitoring Oil Pipeline Vandalism. Covenant J. Eng. Technol. 2017, 1, 59–67. [Google Scholar]
- Azubogu, A.C.; Idigo, V.E.; Nnebe, S.U.; Oguejiofor, O.S.; Simon, E. Wireless Sensor Networks for Long Distance Pipeline Monitoring. Int. J. Electr. Comput. Energetic Electron. Commun. Eng. 2013, 7, 285–289. [Google Scholar]
- Yelmarthi, K.; Abdelgawad, A.; Khattab, A. An architectural framework for low-power IoT applications. In Proceedings of the 2016 28th International Conference on Microelectronics (ICM), Giza, Egypt, 17–20 December 2016; pp. 373–376. [Google Scholar] [CrossRef]
- Berry, J.; Hart, W.E.; Phillips, C.A.; Uber, J.G.; Watson, J.P. Sensor Placement in Municipal Water Networks with Temporal Integer Programming Models. J. Water Resour. Plan. Manag. 2006, 132, 218–224. [Google Scholar] [CrossRef]
- Perelman, L.S.; Abbas, W.; Koutsoukos, X.; Amin, S. Sensor placement for fault location identification in water networks: A minimun test approach. Automatica 2016, 72, 166–176. [Google Scholar] [CrossRef]
- Sela, L.; Amin, S. Robust sensor placement for pipeline monitoring: Mixed integer and greedy optimization. Adv. Enginnering Inform. 2018, 36, 55–63. [Google Scholar] [CrossRef]
- Krause, A.; Leskovec, J.; Guestrin, C.; VanBriesen, J.; Faloutsos, C. Efficient Sensor Placement Optimization for Securing Large Water Distribution Networks. J. Water Resour. Plan. Manag. 2008, 134, 516–526. [Google Scholar] [CrossRef]
- Sarrate, R.; Nejjari, F.; Rosich, A. Sensor placement for fault diagnosis performance maximization in Distribution Networks. In Proceedings of the 2012 20th Mediterranean Conference on Control Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 110–115. [Google Scholar] [CrossRef]
- Guo, Y.; Kong, F.; Zhu, D.; Saman Tosun, A.; Deng, Q. Sensor placement for lifetime maximization in monitoring oil pipelines. In Proceedings of the 1st ACM/IEEE International Conference on Cyber-Physical Systems, ICCPS’10, Stockholm, Sweden, 13–15 April 2010. [Google Scholar] [CrossRef]
- Elnaggar, O.E.; Ramadan, R.A.; Fayek, M.B. WSN in Monitoring Oil Pipelines Using ACO and GA. Procedia Comput. Sci. 2015, 52, 1198–1205. [Google Scholar] [CrossRef]
- Albaseer, A.; Baroudi, U. Cluster-Based Node Placement Approach for Linear Pipeline Monitoring. IEEE Access 2019, 7, 92388–92397. [Google Scholar] [CrossRef]
- Li, R.; Wenting, M.; Huang, N.; Kang, R. Deployment-based lifetime optimization for linear wireless sensor networks considering both retransmission and discrete power control. PLoS ONE 2017, 12, e0188519. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Metje, N.; Chapman, D.; Anthony, C. Water pipeline failure detection using distributed relative pressure and temperature measurements and anomaly detection algorithms. Urban Water J. 2018, 15, 287–295. [Google Scholar] [CrossRef]
- Saeed, H.; Ali, S.; Rashid, S.; Qaisar, S.; Felemban, E. Reliable monitoring of oil and gas pipelines using wireless sensor network (WSN) — REMONG. In Proceedings of the 2014 9th International Conference on System of Systems Engineering (SOSE), Glenelg, Australia, 9–13 June 2014; pp. 230–235. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Mohamad, A.A.H. A Study of Efficient Power Consumption Wireless Communication Techniques/ Modules for Internet of Things (IoT) Applications. Adv. Internet Things 2016, 6, 19–29. [Google Scholar] [CrossRef]
- IoT device standards. In Proceedings of the 2014 IEEE Hot Chips 26 Symposium (HCS), Cupertino, CA, USA, 10–12 August 2014; pp. 1–37. [CrossRef]
- Kais, M.; Eddy, B.; Frederic, C.; Fernand, M. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Wendt, J.F. Computational Fluid Dynamics: An Introduction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Equations of State. In Developments in Petroleum Science; Elsevier: Amsterdam, The Netherlands, 1998; pp. 129–166. [CrossRef]
- Henrie, M.; Carpenter, P.; Nicholas, R.E. Chapter 4-Real-Time Transient Model–Based Leak Detection. In Pipeline Leak Detection Handbook; Henrie, M., Carpenter, P., Nicholas, R.E., Eds.; Gulf Professional Publishing: Boston, MA, USA, 2016; pp. 57–89. [Google Scholar] [CrossRef]
- Sowinski, J.; Dziubinski, M. Analysis of the impact of pump system control on pressure gradients during emergency leaks in pipelines. E3S Web Conf. 2018, 44, 00166. [Google Scholar] [CrossRef]
- Lu, H.; Iseley, T.; Behbahani, S.; Fu, L. Leakage detection techniques for oil and gas pipelines: State-of-the-art. Tunn. Undergr. Space Technol. 2020, 98, 103249. [Google Scholar] [CrossRef]
- Stouffs, P.; Giot, M. Pipeline leak detection based on mass balance: Importance of the packing term. J. Loss Prev. Process Ind. 1993, 6, 307–312. [Google Scholar] [CrossRef]
- Bai, Y.; Bai, Q. Leak Detection Systems. In Subsea Pipeline Integrity and Risk Management; Elsevier: Amsterdam, The Netherlands, 2014; pp. 125–143. [Google Scholar] [CrossRef]
- Tian, C.H.; Yan, J.C.; Huang, J.; Wang, Y.; Kim, D.S.; Yi, T. Negative pressure wave based pipeline Leak Detection: Challenges and algorithms. In Proceedings of the 2012 IEEE International Conference on Service Operations and Logistics, and Informatics, Suzhou, China, 8–10 July 2012; pp. 372–376. [Google Scholar] [CrossRef]
- Wan, J.; Yu, Y.; Wu, Y.; Feng, R.; Yu, N. Hierarchical Leak Detection and Localization Method in Natural Gas Pipeline Monitoring Sensor Networks. Sensors 2012, 12, 189–214. [Google Scholar] [CrossRef] [PubMed]
- Jamali-Rad, H.; Campman, X.; MacKay, I.; Walk, W.; Beker, M.; van den Brand, J.; Jan Bulten, H.; van Beveren, V. IoT-based wireless seismic quality control. Lead. Edge 2018, 37, 214–221. [Google Scholar] [CrossRef]
- Henesy, J.; Patterson, D. Computer Architecture: A Quantitative Approach; Morgan Kaufmann Publishers: Burlington, MA, USA, 2017. [Google Scholar]
- Fahmida, S.; Modekurthy, V.P.; Ismail, D.; Jain, A.; Saifullah, A. Real-Time Communication over LoRa Networks. In Proceedings of the 2022 IEEE/ACM Seventh International Conference on Internet-of-Things Design and Implementation (IoTDI), Milano, Italy, 4–6 May 2022; pp. 14–27. [Google Scholar] [CrossRef]
- Klimiashvili, G.; Tapparello, C.; Heinzelman, W. LoRa vs. Wi-Fi Ad Hoc: A Performance Analysis and Comparison. In Proceedings of the 2020 International Conference on Computing, Networking and Communications (ICNC), Big Island, HI, USA, 17–20 February 2020; pp. 654–660. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pipeline/Oil Characteristics | Value/Type |
|---|---|
| Material | Carbon Steel |
| Pipeline Length (L) | 20 km |
| Wall thickness (w) | 0.323 m |
| Inside diameter (d) | 0.61 m |
| Height/elevation (z) | 0 m |
| Oil kinetic viscosity | 2.90 mm/s |
| Temperature | 50 C |
| Oil density () | 837 kg/m |
| Inlet pressure () | 1000 psi |
| Reynolds no () | 1950 |
| Velocity (V) | 2 m/s |
| Molecular Mass (m) | 229 |
| Oil elasticity (K) | psi |
| Carbon steel elasticity (Y) | psi |
| Gravitational force (g) | 9.81 m/s |
| Constant (e) | |
| Coefficient of friction () | |
| Wave speed (c) | 14.1 m/s |
| Network Parameters | Value/Type |
|---|---|
| Number of sensors | 21 |
| Number of gateways | 1 |
| PHY/MAC model | 802.11ax Ad hoc |
| Transmit power | 80 dBm |
| Transmit distance | 20 km |
| Error model | YANS |
| Propagation Loss | Log-distance |
| Path Loss () | 46.67 dB |
| Reference distance () | 1 m |
| Path-Loss Exponent () | |
| Packet size | 32 bytes |
| Data rate | 1 Kbps |
| Distance between sensors | 1 km |
| Duty cycle | |
| Low Frequency | s |
| High Frequency | ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.; Le Mouël, F.; Stouls, N.; Lipeme Kouyi, G. Development and Analysis of a Distributed Leak Detection and Localisation System for Crude Oil Pipelines. Sensors 2023, 23, 4298. https://doi.org/10.3390/s23094298
Ahmed S, Le Mouël F, Stouls N, Lipeme Kouyi G. Development and Analysis of a Distributed Leak Detection and Localisation System for Crude Oil Pipelines. Sensors. 2023; 23(9):4298. https://doi.org/10.3390/s23094298
Chicago/Turabian StyleAhmed, Safuriyawu, Frédéric Le Mouël, Nicolas Stouls, and Gislain Lipeme Kouyi. 2023. "Development and Analysis of a Distributed Leak Detection and Localisation System for Crude Oil Pipelines" Sensors 23, no. 9: 4298. https://doi.org/10.3390/s23094298
APA StyleAhmed, S., Le Mouël, F., Stouls, N., & Lipeme Kouyi, G. (2023). Development and Analysis of a Distributed Leak Detection and Localisation System for Crude Oil Pipelines. Sensors, 23(9), 4298. https://doi.org/10.3390/s23094298