1. Introduction
With the rapid development of modern industry and the leap in aerospace technology, aerospace tasks are becoming more complex. At the same time, it is becoming more and more common for artificial satellites to fail due to fuel exhaustion. Satellites can fail because of a single component, and the costs are high. Therefore, countries are paying more and more attention to on-orbit service technology [
1,
2,
3,
4,
5]. On-orbit service refers to providing services for human-crewed or uncrewed spacecraft in space, including the repair and replacement of spacecraft components, spacecraft relocation, and liquid transfer. In the complex and harsh environment of space, space robots can assist astronauts in completing complex missions and even replace astronauts in conducting some dangerous extravehicular operations. Space robots can assist in completing space operations and ensure the safety of astronauts and the successful completion of missions. Therefore, the use of space robots for on-orbit services [
6] has attracted more and more attention and is becoming one of the main trends in the development of aerospace technology.
Space robots [
7,
8] providing extravehicular services can complete extensive tasks, including capturing and maintaining small satellites, target handling, and on-orbit assembly. The robots also put forward higher requirements for the performance of motor drives, and researchers are paying more and more attention to small, lightweight motors with high power density. The increase in motor speed not only helps to increase the power density of the motor, but also reduces the size and weight of the equipment, as shown in
Figure 1. Therefore, high-speed and ultra-high-speed motors are increasingly being used in aerospace, flywheel energy storage, and other fields.
The bearingless switched reluctance motor (BLSRM) [
9,
10,
11,
12,
13,
14] is a new type of motor that combines drive and suspension. It combines bearingless technology and switched reluctance motors (SRM). SRM does not require permanent magnets or electromagnets, but instead uses the magnetic reluctance difference between the iron core and the stator windings to generate torque. The rotor and stator of the BLSRM are not supported by bearings, but by magnetic levitation technology. The bearingless motor has no mechanical wear and a long service life.
It has the advantages of having a compact structure, enormous output power, and no need for lubrication. In addition, it has the benefits of a simple structure and the robust fault tolerance of SRM. Compared with traditional servo motors, the BLSRM does not require vulnerable components such as brushes or slip rings, making it suitable for special requirements in the space environment, such as radiation resistance and high–low-temperature endurance. Its compact structure allows for a higher power output in the same space. The manufacturing cost is relatively low as it does not require a feedback control system or precise sensors. Its simple structure usually results in higher efficiency compared to servo motors, especially under partial load or low-speed operation. Due to its good fault tolerance, flexible control, and adaptability in harsh environments, it is widely used in aerospace.
However, due to the structure of the BLSRM motor itself, there are disadvantages, such as the significant torque fluctuation and existence of a torque dead zone. To solve these problems, many experts in the aerospace field and other areas have carried out research on the motor structure and performance. Many domestic and foreign universities and scientific research institutions have introduced bearingless switched reluctance motors [
15,
16,
17,
18,
19,
20]. Yue Qi proposed a novel hybrid rotor type 12/14 BSRM by keeping the air gap constant and modifying the aligned area between the torque and rotor poles to solve this problem. Fangxu Li changed a BLSRM with a 12/12 structure to reduce the axial space and produce higher torque for the purpose of improving performance. Zhenyao Xu proposed a stepped rotor structure and optimally designed the torque pole arc and rotor pole shape to solve the self-starting problems and reduce the torque ripple. Single-neuron-based rotor suspension control of a 12/14 hybrid pole BLSRM with autonomous rotation and suspension poles was presented. This hybrid pole structure produced suspension force, linearly concerning the rotor position. Wenjuan Hao proposed a bearingless linear switched reluctance motor to simplify the levitation force control based on a structural decoupling design for the mover. Shaofei Tang presented a 12/14 bearingless switched reluctance motor (BLSRM) with a small permanent magnet. However, due to the dead torque zone, BLSRM structures cannot self-start at certain rotor positions.
Traditional motors, such as induction motors and permanent magnet synchronous motors, usually have rotors with iron cores. In contrast, the rotor of a BLSRM is coreless. Due to the absence of a core for support, when the rotor is in certain positions, the magnetic field on the rotor does not overlap with that on the stator, which makes it impossible to generate enough magnetic force to start the motor. Additionally, there are significant torque fluctuations during the start-up and acceleration processes. Therefore, we optimized the motor by focusing on two main aspects: we improved the stepped structure to eliminate the dead zone, and we solved the problem of the significant torque fluctuations during start-up.
The particle swarm algorithm [
21,
22] is also known as the bird swarm foraging algorithm or particle swarm optimization algorithm (particle swarm optimization, PSO). PSO has many advantages, such as a simple expression, easy implementation, few setting parameters, and a fast convergence speed. Since being proposed, it has attracted academic attention. At present, its application field has been extended from its initial function [
23], neural network training [
24], to practical engineering problems, such as optimal control [
25,
26] and structural optimization [
27,
28], and has achieved good results. In addition, PSO can handle multi-dimensional, nonlinear, and non-convex optimization problems, and is able to search for a global optimal solution. However, the problem of motor parameter optimization is usually a high-dimensional problem. In order to reduce torque ripple and improve the motor’s starting ability, in this paper, we consider torque pole arc, rotor pole arc, and step structure geometry parameters as optimization variables. In addition, PSO has been widely used in the design and optimization of motors. PSO is a heuristic optimization algorithm that optimizes problems by simulating the behavior of birds searching for food. However, the particle swarm optimization algorithm easily reverts to finding the local optimal solution, and is not suitable for high dimension problems..
In this study, we conducted the initial design and optimization of the BLSRM structure based on its structure and working principles. With the objective of addressing the issues of self-starting and oscillation by designing a stepped rotor, an optimization method for motor parameters was implemented by integrating finite element analysis with the PSO algorithm. The initial motor was optimized using this method to resolve the aforementioned problems. The main contributions of this paper are summarized as follows.
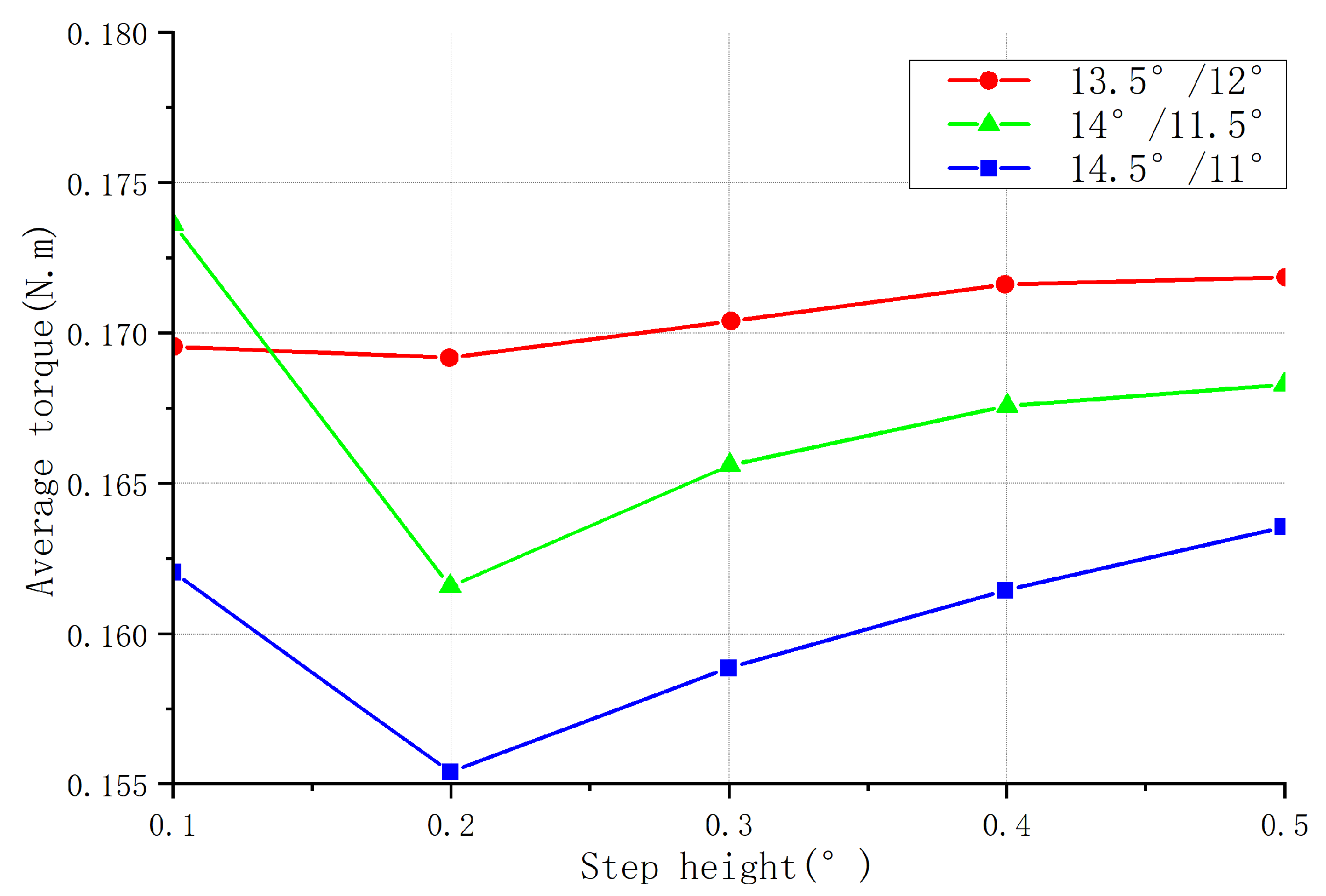
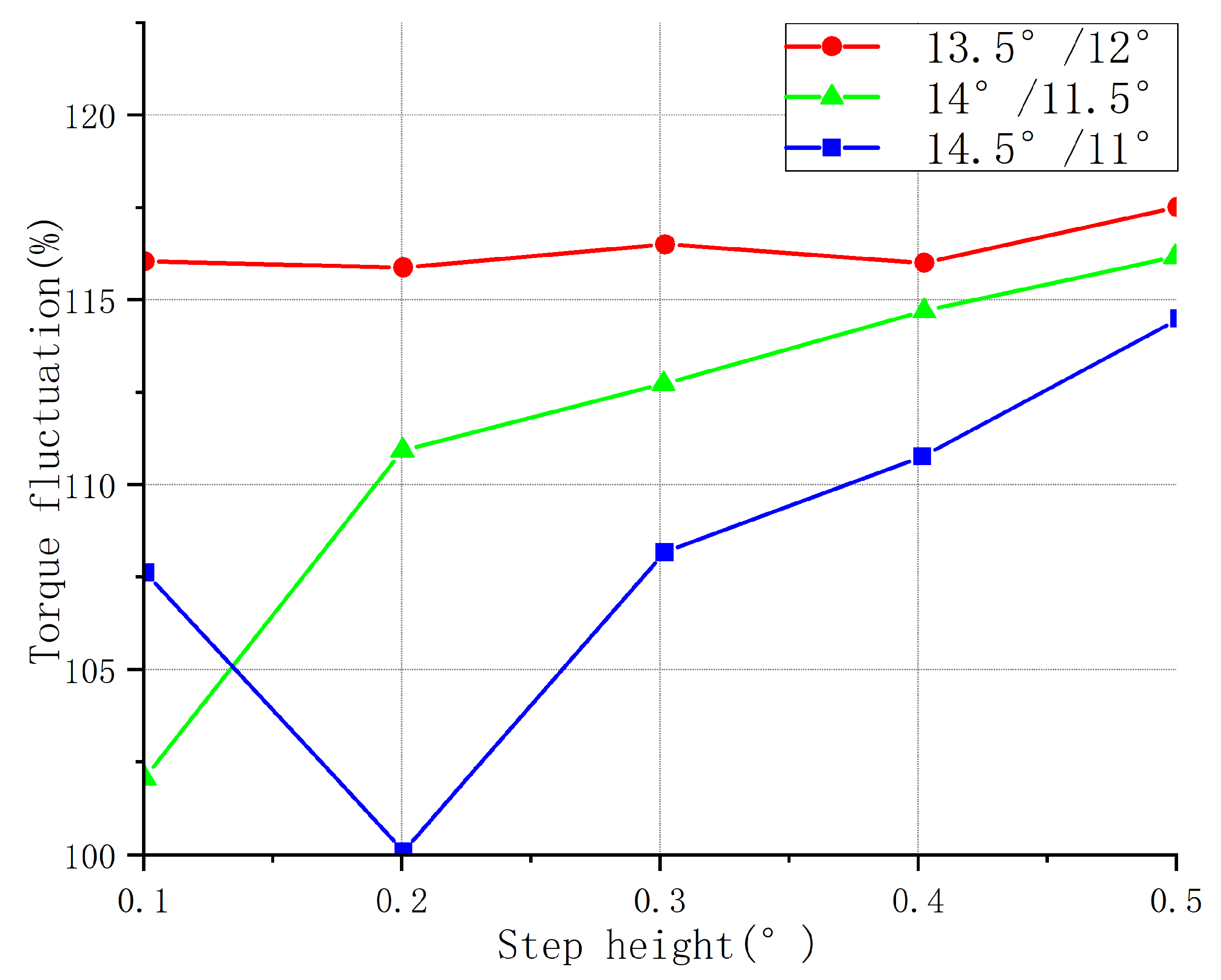
(1) Aiming to solve the problems of the poor self-starting ability and significant torque fluctuation of the 12/14 hybrid stator pole bearingless switched reluctance motor, we propose two critical parameters, namely, step height and step angle, and conducted an experimental analysis on the starting torque, average torque, and torque fluctuations under different conditions in order to design a stepped rotor bearingless switched reluctance motor structure.
(2) To solve the problems of the need to rely on experience, the time- and labor-consuming nature, the high degree of specialization, and the difficulty of obtaining optimal the structural parameters of the current motor design, we combined the finite element analysis method and particle swarm algorithm to establish a systematic motor structure optimization method.
(3) We improved the particle swarm optimization algorithm and enhanced its global optimization capability. Based on this method, we optimized the design of the stepped rotor bearingless switched reluctance motor.
(4) The finite element analysis results demonstrated the following: Compared with the original motor, when the excitation current was 2A, the initial design of the stepped rotor bearingless switched reluctance motor increased by 0.11 in the starting torque and decreased by 1.9% in torque ripple. After optimization, the torque ripple was further reduced by 9.2%. In contrast, the starting torque remained unchanged, proving that the stepped rotor bearingless switched reluctance motor structure was adequate and that the proposed motor optimization method was feasible.
The remainder of this paper is organized as follows:
Section 1 reviews the related work of the BLSRM. In
Section 2, we review the structure and working principle of the stepped rotor BLSRM and introduce the initial design proposal for the stepped rotor BLSRM.
Section 3 introduces the standard particle swarm optimization algorithm (PSO) and the optimized particle swarm algorithm, considering the characteristics of the motor optimization problem.
Section 4 combines the improved particle swarm algorithm with the finite element method to optimize the initially designed motor structure.
Section 5 analyzes the motor’s performance using finite element analysis software to verify the motor structure’s effectiveness and compare it with the original 12/14 hybrid stator pole type BLSRM. Finally,
Section 6 concludes the paper with a summary and discussion.
3. Improved PSO
In PSO, the n-dimensional problem to be optimized corresponds to an n-dimensional solution space. The potential solution for the problem to be optimized is regarded as the mass-free and volume-free moving particles in that space, described by the position and velocity such that each particle has different characteristics, thus forming a particle population. During PSO, an evolutionary search is carried out through the cooperation and competition of each particle in the population.
PSO achieves the purpose of optimization by completing an evolutionary search through the cooperation and competition of each particle in the group. The key to this algorithm is to update the particle position and velocity, that is, to approach the optimal global solution quickly. Each particle updates itself by tracking the optimal solutions for individual and group extreme values. For the optimal particle of the group, the powerful personal matter and the extreme group value are relevant. Therefore, when the particle is updated, the learning ability of the self-cognition and social cognition parts is zero, and there is no autonomous evolution mechanism. Therefore, it is very likely that it will fall into local extreme points and be unable to escape, so the PSO algorithm can mature quickly and early.
We proposed eliminating the inferior and bolstering the superior value to solve this problem. The main idea is that during iterative updates, we sort the entire particle swarm according to the fitness value and eliminate the particles with lower fitness values in this generation, according to the dimension, n, of the problem. Taking the particle with the most significant group fitness value as the center, we divide the solution space into regions, and new particles with different directions and uniform distributions are generated in these new regions.
When there is a new particle whose fitness value is larger than that of the original optimal particle of the group, the group extremum is updated; that is, it is successful in helping the group’s optimal particles to escape the optimal local solution. The key to PSO is updating the particle position and speed, that is, quickly growing close to the optimal global solution. This paper addresses the problems of the standard PSO and combines them with the optimization of the structural parameters of the motor to improve the standard PSO.
In this paper, the adaptive inertial weight method is adopted; that is, the inertial weight changes with the change in the particle’s fitness value. The expression is as follows:
where
represents the current fitness value of the particle,
and
represent the minimum fitness value and the average fitness value of all the current particles, and
and
represent the maximum and minimum values, respectively, usually taken as
and
.
The learning factor
decreases with the increase in the number of iterations, and
increases with the increase in the number of iterations, meeting the requirements, and generally follows
. The change formula of the learning factor is
where
and
, respectively, represent the initial values of
and
, and
and
, respectively, represent the final values of
and
. In this paper,
,
,
, and
.
The formula for generating new particles is as follows:
where
and
are the current number of iterations and the maximum number of iterations, respectively, and
is a coefficient that linearly decreases as the number of iterations increases. It can make the optimal particle search step of the group more prominent and increase the probability of escaping from the local optimum in the early stage of optimization, as well as making the search step size of the optimal particle of the group smaller in the later stage of optimization, which is beneficial to improving the accuracy of the algorithm.
and
, respectively, are the speed and position of the optimal particle of the group, and
is the direction of the first particle in the first cutting area, where
meet the following conditions:
where
ESC is the escape capability coefficient, which represents the number of new particles generated in each direction, meaning that the
ESC is an integer greater than or equal to 1. In dealing with a complex multipolar value problem, there is a large difference in fitness value between the optimal local value and the optimal global value, which produces a new particle in each direction; thus, the escape ability coefficient
ESC, which represents the number of new particles generated in each direction, is set as an integer greater than or equal to 1. When it cannot escape from the local optima, the coefficient can be appropriately increased to further enhance the global search capability of the algorithm. We should ensure that Formula (10) is satisfied when adjusting the escape ability coefficient.
Figure 11 shows the Improved PSO flow chart.
It can be seen that the elimination of the particles with lower fitness values and the procedure of generating new particles are merged into the update iterative process, so the algorithm steps do not become complicated, and the algorithm can help the particles to escape from the optimal local domain while eliminating particles with relatively poor fitness values. The particles also improve the global convergence speed of the algorithm.
This section described the process of improving the particle swarm optimization algorithm and enhancing its global optimization ability. Next, to solve the common problems of the current motor design, such as the need to rely on experience, the time-consuming and labor-intensive nature, the high degree of specialization, and difficulty of obtaining optimal structural parameters, the finite element analysis method and particle swarm algorithm were combined to establish a systematic motor structure optimization. The technique was used to optimize the stepped rotor bearingless switched reluctance motor design.
4. Optimized Design of Stepped Rotor BLSRM
4.1. The Selection of Optimization Variables
To reduce the torque fluctuation, improve the motor’s starting ability, and ensure the motor’s output torque, the torque pole
of the motor, the rotor pole
, and stepped structure geometry parameters were considered as optimization variables first. However, as
was part of the rotor pole
, the step angle was interrelated and could not be used as an optimization variable simultaneously. To maximize the effect of the stepped structure, we chose the torque pole
, rotor pole
, and step height
as the optimization variables. The step angle should satisfy the following condition:
4.2. Constraint Setting
To ensure that the motor has a specific self-starting ability when the torque winding current is constant at
, the starting torque
met the following condition:
Increasing the motor’s starting torque risked causing the output torque to decrease. Therefore, during the optimization process, the average torque
of the motor during a running cycle met the following condition:
where
is the average torque of the original 12/14 BLSRM in an operating cycle.
4.3. Determination of the Objective Function
To solve the problems of the low starting torque and significant torque fluctuation of the 12/14 BLSRM, the starting torque of the motor was restrained by Formula (12) to enhance the self-starting ability. The average torque was calculated using Formula (13) to guarantee the output torque of the motor. Therefore, selecting torque fluctuation as the only optimization target was a necessary step, ensuring the optimization effect and simplifying the optimization problem.
The objective function is defined as
The calculation of the torque fluctuation was as follows:
4.4. Method for Calculating Fitness Value Based on Finite Element
The accuracy of the optimization target calculation is paramount when using PSO to solve practical problems. However, BLSRM is a complex system with nonlinear, strong coupling. When deriving its mathematical model, it is easy to ignore edge effects, magnetic saturation, and magnetic leakage. Moreover, the rotor’s particular stepped structure complicates this paper’s mathematical model. Therefore, an optimization target calculation method based on finite element electromagnetic field analysis is more accurate than a calculation method based on mathematical models.
The fitness function was used to evaluate the fitness of each particle. The fitness function was designed based on the objective function and torque ripple, and its purpose was to map the value of the objective function to the fitness value for comparison and selection by the optimization algorithm. Generally, the smaller the value of the fitness function, the more suitable the particle is for the optimization problem. We used the FEMM 2D electromagnetic field analysis software to model and analyze each particle. First, we established the finite element model, shown in
Figure 12, according to the position information of the particle. Then, we carried out an analysis to obtain the maximum, minimum, and average torques. Following this, we calculated the torque ripple, that is, the fitness value.
4.5. Algorithm Implementation
Figure 13 shows the block diagram of the optimized design system of the stepped rotor BLSRM.
We used Matlab to prepare the improved particle swarm algorithm program for the optimization design process. We connected it to the 2D finite element analysis software FEMM. We repeatedly called the FEMM software to complete the model building and electromagnetic field analysis of the finite element of each particle in the optimization process. Moreover, we obtained performance indicators such as the starting torque, average torque, and torque fluctuation to calculate the fitness value of each particle.
The optimization process was as follows:
Optimization process
Begin
Step 1: Set the parameters such as the inertia weight, learning factor, and escape ability coefficient;
Step 2: Randomly generate an initial group;
Step 3: Call the FEMM finite element magnetic field analysis software to model and analyze each particle and return the optimization target value;
Step 4: Calculate the fitness value of the particle according to the returned optimization target value;
Step 5: Compare the initial individual extreme importance and the initial group extreme value after calculating the fitness values of all the particles in the group;
Step 6: Perform iteration, sort the entire particle swarm by fitness value, eliminate the particles with the lower fitness values in the generation according to the number of variables, generate new particles at the particle positions with the maximum fitness values, and give them different directions and uniformly distributed speeds;
Step 7: Update the positions and velocities of the remaining particles;
Step 8: Update the individual extremum values and the group extremum values;
Step 9: If the stop condition is met (the preset accuracy or the number of iterations is reached), stop the search, and the result will be the output; otherwise, return to step 6 to continue the search.
End
Figure 14 shows the change curve of the fitness value of the optimal particle in the stepped rotor BLSRM parameter optimization process as the number of iterations increased. It can be seen that the most optimal solution was found when the 28th iteration was reached.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}