1. Introduction
Academics and businesspeople alike have taken an early interest in the emerging field of connected and autonomous vehicles (CAVs) [
1]. In 2015, the government of the United Kingdom established the “Centre for Connected and Autonomous Vehicles” [
2]. This organisation released a report in 2018 detailing R&D efforts in the field of CAVs. A study titled “Connected and Autonomous Vehicles: the future” [
3,
4] was released by the House of Lords in 2017. In 2017, several groups, including the British Standards Institute (BSI) in the UK, released reports detailing their plans to develop CAV standards [
5].
Autonomous systems such as self-driving cars will be commonplace in the future, and in preparation for their use, consumers and researchers will be able to practise using a variety of automation features that will be included in all future AV systems. Before being put into use, all of the features of an AV, including their functions and connections, safety alerts and privacy concerns, should be locked down. However, these capabilities can be compromised by cybersecurity vulnerabilities (CVs), resulting in either malfunctions or connections that just do not work. Cyberattacks, threats, and the mechanical failure of defective components, systems, and communication services that depend on energy efficiency all pose serious risks to the safety of AVs. Due to the fact that vulnerabilities in IoT devices also manifest in the context of data transmission, cybersecurity is rapidly becoming a more pressing issue in autonomous vehicles and other data communication systems.
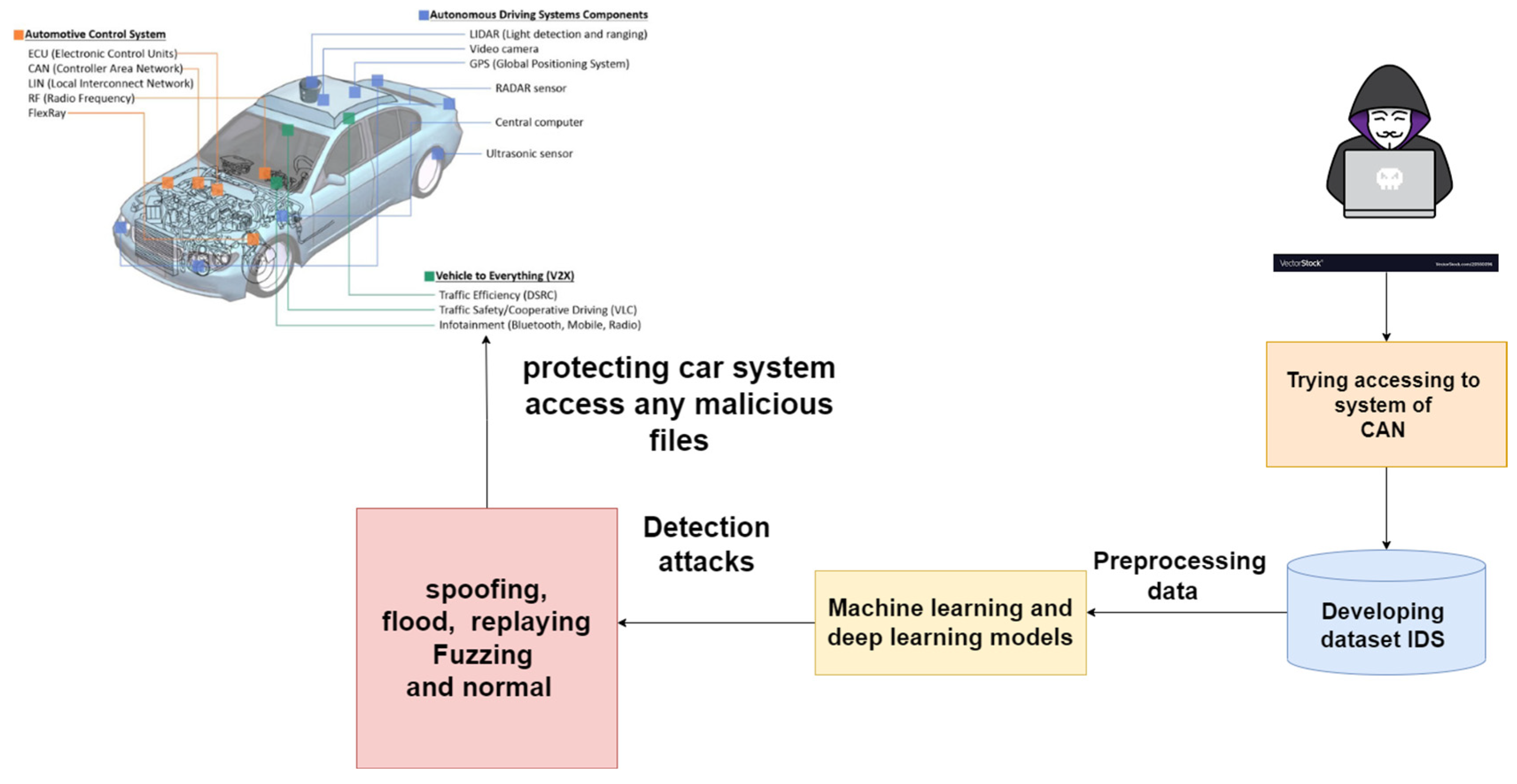
Figure 1 shows a smart city in which autonomous systems based on the IoT are used, revealing the pathways through which hackers can try to access car systems.
The high levels of in-vehicle capabilities seen in today’s intelligent automobiles are provided by electronic control units (ECUs). Furthermore, serial buses are used to link these components together. In today’s intelligent automobiles, the controller area network (CAN) protocol is in charge of ensuring that all of these components are able to effectively communicate with one another. Enhanced road safety, communication with the outside world, the plethora of new services designed to improve the customer experience, and so on, are just a few of the numerous benefits that contemporary in-vehicle technology enables intelligent cars with smart connectivity and computerisation to provide. On the other hand, hackers are able to more easily gain control of a vehicle’s systems due to the increased vulnerability introduced by these linked smart features. Access to the electronic components installed in today’s sophisticated automobiles might provide hackers with new avenues of attack [
6,
7].
Figure 2 presents a schematic representation of a CAN network.
Current in-vehicle network protocols contain several holes, such as insecure ID-based arbitration systems for conflict resolution and the lack of message authentication or encryption [
8]. The security of today’s intelligent cars is a pressing concern, because there is a risk that attackers could exploit the flaws currently present to cause bodily harm or property damage on the road. Recent decades have seen the development of cutting-edge technology for autonomous cars, as well as other types of smart, intelligent car. There have been several recent successes in the automotive industry that can be directly attributed to the vast improvements in connectivity, as well as the proliferation of new communication channels and access points. On the other hand, new threats to data privacy and security have been made possible by these advancements [
9]. As a result of these flaws in cybersecurity, human lives are in jeopardy. Given the increasing efficiency of the communication capabilities of the currently connected cars and the need for the real-time exchange of important safety-related information between vehicles and the surrounding infrastructure [
10], it is clear that this is an area of rapid development. In light of this development, the landscape of automobile cybersecurity is changing rapidly and dynamically. Identifying potential security holes in network infrastructures as quickly as is feasible is crucial for effectively addressing cybersecurity concerns. There is unease that cybersecurity flaws [
11,
12] might compromise the safety of today’s intelligent automobiles when driving on the road. Those who work with unmanned aerial vehicles (UAVs), sometimes known as drones, face difficult challenges in terms of cybersecurity. To begin, because of the nature of CAV cybersecurity, it is difficult to anticipate all the different attacks that could take place. This presents a challenge. Everyone who creates software or uses it has a responsibility to be aware of the fact that attack patterns are also evolving, thus calling for a continuous response to the unknown. Those who attack CAVs only need to find a single opening through which to launch an attack. Furthermore, CAVs are assembled using a wide variety of components with specialised characteristics. If even a single one of these parts breaks, the integrity of the whole system will be compromised. Because of the linked nature of the many components that make up a CAV system, performing vulnerability assessments represents a challenging task. The many sensors found in CAVs produce enormous amounts of data, the administration of which is made more difficult by the fact that the data may be present in several different forms. If the data are in a format and include content that is consistent with the standards of the CAV, then the processing of the data will be much easier. In the end, CAVs are able to interact with one another owing to the use of a number of wireless communication technologies. These technologies include Bluetooth, dedicated short-range communications (DSRC) and WiFi, among others. Because of this, it is more difficult to guard against threats to cybersecurity in CAV networks than in wired ones.
There are several classification methodologies that use machine learning (ML) algorithms to better aid administrators in recognising network assaults, including the naive Bayes classifier, decision trees, logistic regression (LR), support vector classifiers (SVCs), and deep convolutional neural networks [
13,
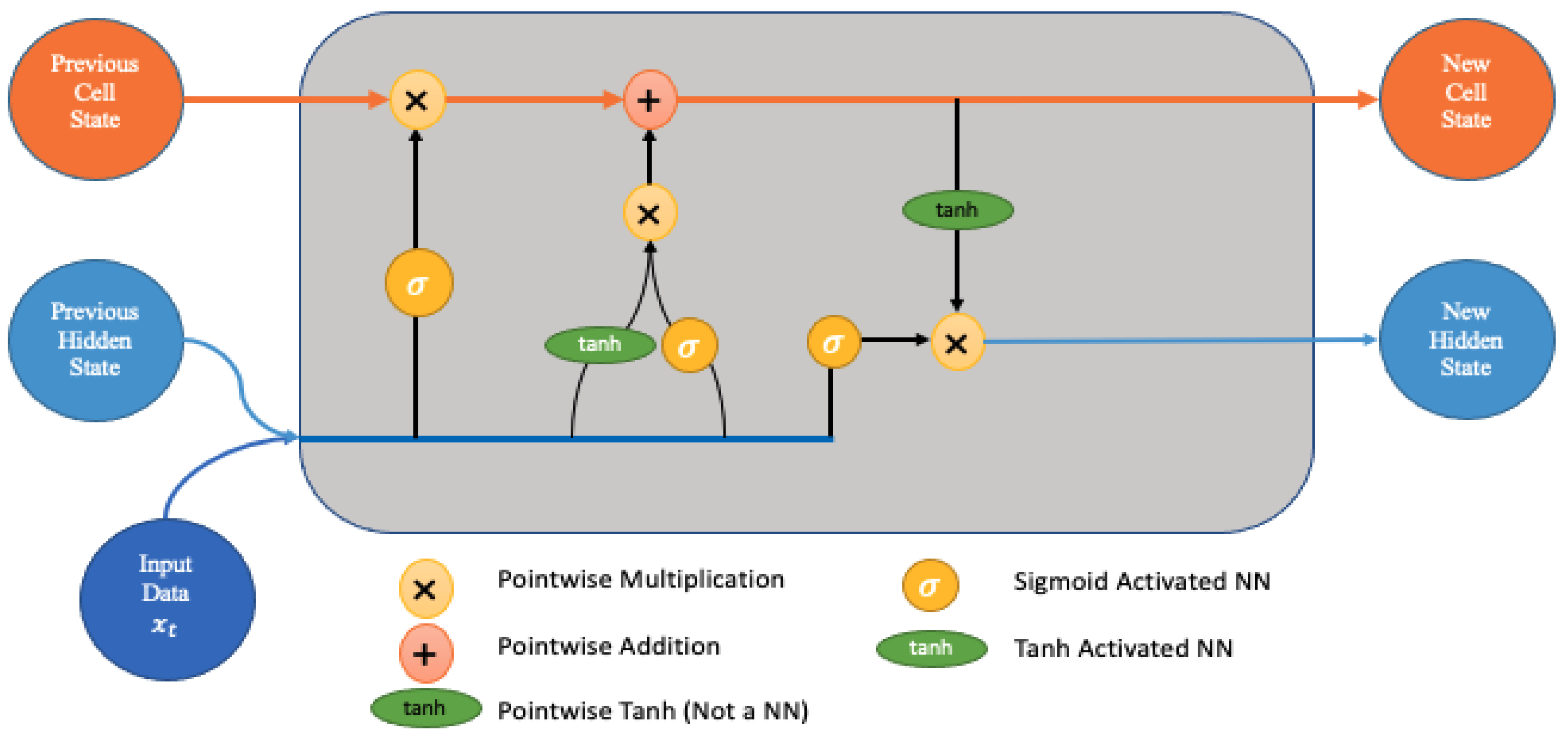
14]. Algorithms like these can find application in a wide variety of categorisation approaches. In the future, OMIDS may need to be able to cope with a wider array of threats, including extortion, among other potential problems. The majority of ML methods that are currently available for the identification of cyberattacks on OMIDS were developed on the basis of cyber threat studies in which routing data were paired with prospective attack profiles gleaned through behavioural analysis techniques, such as packet collection, filtering and feature comparison. In these cyber threat studies, routing data were paired with prospective attack profiles. The routing information provided by CAN devices can be used to classify the many possible types of attack, assess the actual type of attack, detect which ECU has been hacked, and activate countermeasures. As a direct consequence of this, security managers have begun to use deep convolutional neural network techniques. The include long short-term memory (LSTM) networks [
15], convolutional neural networks (CNNs) [
16], and recurrent neural networks (RNNs) [
17]. Deep convolutional neural networks (CNNs) provide a novel method for enhancing threat identification accuracy and decreasing false positives in network intrusion detection (FPR). In high-degree-of-freedom models, however, the high levels of variance (in other models) or large degrees of bias (in low-degree-of-freedom models) imply that it might not be possible to fit the data distribution well using a single base classifier [
18].
Almost 1.3 million people are killed in automobile accidents, annually, as reported by the World Health Organization (WHO). Age is the single most significant determinant in mortality rate, with young people under the age of 29 being at highest risk of mortality. Driving under the influence of alcohol or drugs, driving while distracted, driving automobiles that present a high degree of risk, and driving in an unsafe environment are among the leading contributors to traffic crashes [
5]. Excessive speeding is also a principal cause of traffic accidents. AVs support driving activities by sensing the surrounding environment, planning the quickest and safest routes, controlling speed, and performing navigation and parking without the input of a human driver. This helps to reduce the number of accidents caused by human error, which, in turn, helps to reduce the overall number of accidents. The possibilities arising from this have piqued the curiosity of a great number of scholars and businesses in a number of countries all around the globe. We can speculate as to the potential beneficial impacts that self-driving cars may have on both society and the economy, despite the fact that it is unlikely that they will find extensive utilisation in the near future. They have the ability to play a substantial role in decreasing the incidence of traffic accidents, rate of fuel consumption, and degree of congestion on roads. They have the capacity to do this in a number of different ways.
In addition, one of the aspects of CAVs that poses the greatest risk is their shortcomings in terms of cybersecurity, which can be a contributing factor in automobile collisions due to the fact that attackers are able to alter cars’ navigation systems. As a consequence of this, we came up with a plan to protect CAVs using an artificial intelligence (AI)-based security system that is able to recognise and repel any assaults directed at them. The stated fundamental purpose of the system is to ease the issues associated with information security in CAVs through the identification of possible attack messages and the implementation of CAV cybersecurity. The issue of robust construction is one that has to be addressed in order to combat cyber threats targeting IVN communication. In light of the fact that CAVs have emerged as a new technology in a number nations and have become ingrained in the fabric of everyday social life, it is vital to develop innovative methods for detecting infiltration using IVNs. The key aim of this study was the development of deep learning algorithms with the capacity to recognise intrusions into CAN buses located in automobiles. This method exhibits considerably improved accuracy of detection for various types of attack compared to the systems in place up until this point in time.
The primary objective of the presented system is to alleviate the difficulties associated with information security in CAVs via the detection of possible attack messages and the implementation of CAV cybersecurity. Data in the CAN bus protocol are not encrypted; therefore, hackers are able to perform replay attacks and inject malicious messages into networks (sometimes referred to as executing an intrusion-based attack) by employing a reverse-engineering technique in order to understand each CAN packet. This allows hackers to perform intrusion-based attacks. Therefore, in order to identify abnormal patterns of activity within vehicular networks, artificial intelligence technologies are necessary. In this article, we develop a prediction model that is able to identify unusual traffic patterns in the protocol of a vehicular network. This technology can be applied in the identification of traffic anomalies in automotive networks.
In the course of this research, we used a variety of machine learning methods, such the KNN, decision tree, and deep learning LSTM, and deep autoencoders approaches, in the construction of an effective intrusion detection system that is able to identify cyber threats to IVN communication. A deep autoencoding algorithm anomaly detection model is proposed with the aim of strengthening the CAN bus protocol used for in-vehicle network communication. The deep autoencoder is made up of two symmetrical deep-belief networks, each having four or five shallow layers. One of the networks serves as the encoding half of the net, while the other network is responsible for the decoding half; this combination makes it possible for the proposed deep autoencoder method to achieve efficient performance in terms of accuracy and the time cost of building the model. Finally, we demonstrate that a deep autoencoder with significant neural network parameters is appropriate for the detection of attacks with high accuracy on the basis of the CAN dataset, in contrast to our previous work.
2. Background Study
In this section, the principles underlying attacks on and vulnerabilities of IVNs will be described, as well as the cybersecurity methods utilised in their solutions. The majority of research efforts in this domain have so far been devoted to CVs and other mitigation measures for huge data transmission between roadside units (RSUs) and AVs. For instance, one of the more frequent kinds of attack, known as denial of service (DoS), may be avoided with the use of clever defensive techniques such as that which was recently reported. This method makes use of backpropagation neural networks to examine the percentage of overlapping scores. The proposed system safeguards external communications for autonomous and semi-autonomous vehicles, in contrast to current systems, and it does so without requiring the use of extra sensors, such as radar, LiDAR, computer vision or RSUs [
19].
In the United States, some states have recently established laws that allow for the testing of CAVs on public roads [
20]. The year 2009 marked the beginning of Google’s [
20] work on the development of AVs. In 2016, the company established Waymo as a wholly owned subsidiary, and in 2018, it launched a pilot program in Phoenix in which a select group of locals were allowed to request driverless journeys (although a safety supervisor driver was still present in the vehicle). On the road, Tesla [
21] has been developing autonomous driving solutions for CAVs and putting them into commercial use. A large amount of research has been published by academic institutions in the United States, one of which is the University of Michigan [
22], which is situated in close proximity to an Mcity test area. Long-standing market leaders in Europe, including BMW, Audi and Mercedes-Benz, have all invested substantial amounts of money into the research and development of AVs [
23].
In addition, the authors of [
24] researched the flaws with respect to cybersecurity in AVs that make them vulnerable to sensor attacks. They proposed a novel rule-based intrusion detection system (IDS) for CAVs that was able to identify sensor attacks and localise their sources. The proposed inertial navigation system used a combination of a cumulative sum (CUSUM) discriminator and an extended Kalman filter (EKF) to estimate the vehicle’s location. Multiple sensors were installed, offering continuous updates on the state of the driverless car, making it safer from interventions from the outside world. In addition, a detector was employed to check for inconsistencies in the values being reported by the different sensors. Finally, the information gathered by the detectors was processed using a rule-based separation system to provide information on aberrant sensors. The developed model was presented in detail, together with the conclusions of the experiments, on the basis of which the model’s applicability for real-world data obtained from autonomous cars was demonstrated.
In addition, the authors of [
25] investigated the classification of dangers in the context of autonomous automobiles, especially in relation to three essential security services: authentication, accountability and availability. In [
26], the authors delved deeper into different defensive mechanisms against assaults on autonomous cars, as well as how such defensive mechanisms had developed during their investigation. In particular, the authors emphasised the significance of blockchains in resolving and mitigating privacy and security issues (for AVs). They wrapped up their investigation by discussing the actual problems and obstacles associated with using blockchain technology in AV security solutions.
The authors of [
27] recommended the use of two different forms of deep learning to spot potential DoS attacks on electric vehicle charging stations (EVCSs). Python’s LSTM and deep neural network (DNN) algorithms were used by the authors to achieve the appropriate classification of distributed DoS attacks. It is thought that DoS attacks can be carried out by means of any network connection that is sufficiently weak. The DNN and LSTM algorithms were both trained, tested and confirmed by our team. According to the authors, both deep learning algorithms showed very high levels of accuracy.
The outcomes of the study that was conducted in [
28] demonstrated that vulnerabilities in autonomous cars may put autonomous services in jeopardy. As a direct result of this, research has been conducted to classify the dangers posed by autonomous cars and to propose methods to combat these hazards. The authors proposed three unique types of attack, categorised on the basis of their target, which could be autonomous control systems, components of autonomous driving systems, or vehicle-to-everything communications. In [
29], the authors provided a comprehensive review of cybersecurity as well as contemporary countermeasure strategies for the purpose of defending AVs and the services that they supply. Furthermore, that study also covered the requirements for CAVs, as well as the unresolved challenges that still need to be addressed. According to the findings of yet another study [
30], the security of autonomous driving can be broken down into four distinct categories: sensors, operating systems, control systems and vehicle-to-everything connections. ECUs, sensors, intra-vehicular connections, and inter-vehicular linkages are all potential points of attack, and in [
31], the methods of defence against such attacks were modelled and discussed. In [
32], a high-level description of security problems related to data transmission was provided across a range of apps, including antivirus programs, in addition to solutions for mitigating these flaws. The primary focuses in [
33] were cybersecurity for robots and the development of security solutions making use of multi-factor cryptographic approaches in order to guarantee the safety of autonomous systems. Multi-access edge computing (MEC), which was studied in [
34], can be used to uncover vulnerabilities in the security of 5G-based use cases (AVs may benefit from MEC, since it can improve the performance of automated driving, augmented reality and machine-type communications). Another study [
35] provided detailed information on the use of autonomous systems to assist in the development of upcoming autonomous mobility services. CAVs make use of a wide array of IoT sensors in order to keep an eye out for any dangers in their immediate environments. In [
36], the authors presented a security policy road map as a means of attaining long-term AV adoption. The policy packages that are meant to actualise superblock vision consist of six overarching themes, and these topics describe the measures that need to be taken in order to achieve the changes envisioned in transportation legislation by the year 2050. The goal of [
37] was to determine how to achieve the highest possible levels of safety and security while integrating AVs with intelligent transportation systems (ITSs). Because the transportation systems of the future will be very complicated and highly dependent on a wide range of distinct technological fields, we anticipate that they will be adaptable, dynamic and open to changes and improvements with respect to the level of safety they provide. By the year 2030, it is anticipated that the implementation of four distinct types of AI countermeasures, namely those that are AI-supplemented, AI-generated, AI-mediated and AI-facilitated, will assist in the resolution of selected security concerns in autonomous transportation services, namely CVs, and countermeasures for data transmission. As a direct consequence of this, it will be necessary to satisfy more stringent regulations [
38,
39,
40,
41,
42,
43] in the planning and development of autonomous transportation services.
There is a paucity of published material dedicated to the use of and research into CTI on IoV; maybe this is because IoV technologies are still relatively novel and immature, and are seldom utilised in actual practice at this stage. According to Kukkala et al. [
44], in order to effectively combat cyberattacks in CAVs and IoV systems, it is important to employ threat intelligence to achieve enhanced cybersecurity testing and to disseminate this knowledge across diverse industries. In a similar vein, He et al. [
45] highlighted the benefits of using AI methodologies, such as ML, to analyse CTI in IoV systems. These benefits include the capacity to manage vast volumes of data and to automatically carry out tasks. Honeypots were recommended by Panda et al. [
46] as a method for gathering and analysing CTI in IoV situations. These are designed to deceive attackers. Basnet et al. [
47] used deep learning algorithms as an example to illustrate how CTI may be used to detect cyberattacks in CAVs. CTI stands for cyber threat intelligence. Ali et al. [
48] proposed the use of several ML algorithms to provide secure communication between vehicles. In addition to safety, the preservation of the environment and maintaining stability are also quite important. Liu et al. [
49] proposed cloud-edge computing for performing IoV service deployment and execution with privacy protection. Mohseni et al. [
50] studied realistic ML safety solutions that could potentially be used to enhance engineering safety for ML-based software in autonomous automobiles. This is essential work, since engineering safety for ML-based software in autonomous cars is critical. A paradigm in which CTI was modelled and domain-specific hazard categories were defined was suggested by Kumar et al. [
51] and applied in the setting of maritime transportation systems, which is a relevant field of study.
As a result, the gap detected in previously conducted research may be summed up as follows: To begin with, there is no single method that can be used to systematically evaluate the possible weaknesses of CAVs to multiple attacks. While most studies have focused on the theoretical aspects of CAV cybersecurity, or the use of machine learning and deep learning, the detection rate has remained low due to the complexity of CAN networks. Therefore, we aimed to enhance these algorithms to increase the detection rate.
In this article, we will discuss some of the most recent findings regarding intrusion detection in IoV. By observing typical traffic patterns in an intra-vehicle network, V2V communications, and V2I networks, in [
51,
52], the authors introduced a DL-based IDS for ITS. The LSTM autoencoder is the foundation of the proposed IDS, and is able to detect abnormal events in IoV at the primary gateway. The model was tested for inter-vehicle communications using car-hacking. The primary motivation for developing this approach was to improve system performance while simultaneously minimising computing requirements. We developed a system that is able to improve the detection rate to >99% in terms of the accuracy metric.
The purpose of this article is to construct an AI-based CAV framework in order to conduct an analysis of the potential cybersecurity risks posed to CAVs using the UK CAV cybersecurity framework as a guide to assist in the creation of a methodological approach for safeguarding CAV systems and the data that are transmitted among them.
5. Discussion
Autonomous vehicles (AVs) have the potential to bring about a wide range of advantageous changes, such as an improvement in overall safety and reductions in energy consumption, pollution and traffic congestion. If security and privacy concerns are not addressed; however, the advantages that are anticipated to result from the use of these engines may not be realised. Hackers will be presented with additional opportunities to carry out destructive attacks thanks to AVs, which could pose a significant risk to the future of mobility and data security.
Controller area networks (CANs) have not yet integrated sufficient security methods, such as message authentication and encryption, despite their being the most extensively used in-vehicle communication protocol. Consequently, the CAN bus is susceptible to a wide variety of cyberattacks. It would seem that the use of the Internet of Things (IoT) in the sphere of transportation has enormous untapped potential. Cars equipped with intelligent vehicle systems are able to share information with one another in a smooth manner, helping to improve both traffic management and road safety. The dynamic architecture of this network connects a huge number of cars, making it susceptible to a variety of attacks, including those related to authentication, data integrity and confidentiality. These dangers put the well-being of passengers, as well as vehicles and the system as a whole, in jeopardy. In order to protect connected and autonomous cars against potential vulnerabilities, researchers have explored a variety of strategies.
A wide variety of intrusion detection systems (IDSs) have been created specifically to identify and stop these kinds of attacks. AI-based IDSs, on the other hand, are an ideal defence mechanism against cyberattacks on automotive systems due to the tremendous generalisation capabilities of AI.
The method proposed in this research uses ML and deep learning models to detect attacks on the CAN and to protect the network. The system was tested using a standard dataset. The deep autoencoder scored a high accuracy level of 99.98%.
Figure 15 shows the receiver operating characteristic (ROC) curve of the LSTM model for the detection of CAN attacks.
Table 8 presents a comparison of the performance of the proposed machine and deep learning models for intrusion detection in CAN networks between the Car-Hacking and UNSW-NB15 datasets. It can be observed that that the proposed system achieved high performance when using the Car-Hacking dataset.
In
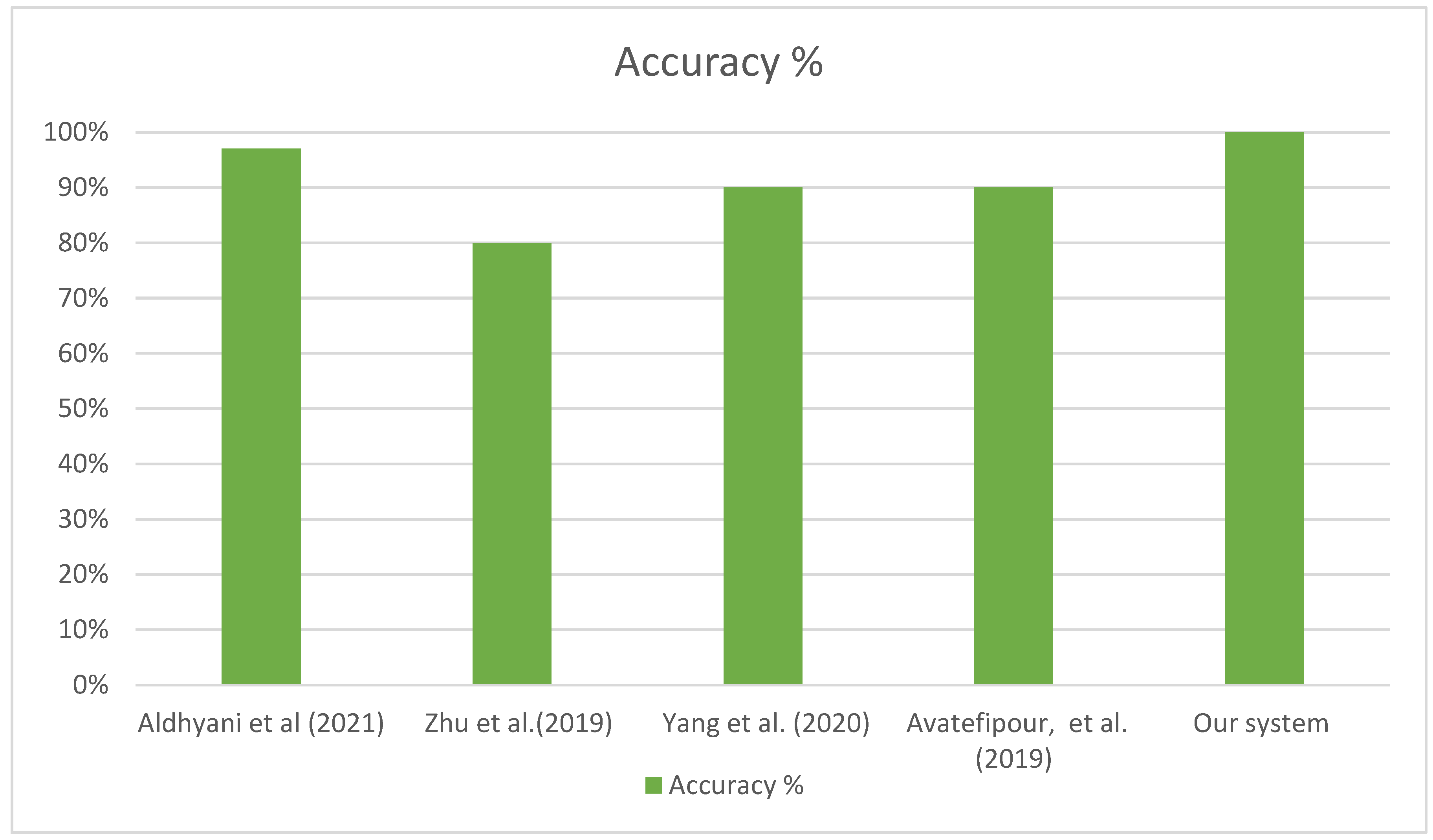
Table 9, a comparison of the accuracy of currently available deep learning algorithms determined by other researchers, and which are considered to be state-of-the-art models, with our obtained findings is the presented. The comparisons demonstrate that our suggested model is superior in every respect, particularly with regard to the precision of the data generation process. The accuracy of the suggested framework, which achieved a score of 99.98%, beat all existing systems in terms of its ability to identify threats to vehicle networks.
Figure 16 shows how the suggested solution fares in terms of accuracy compared to other setups for CAN security.
6. Conclusions
The rapidly advancing state of computing has had a considerable influence on the research and development of AVs in a variety of domains. Because of the crucial roles they play in enhancing the quality of life in established cities, autonomous cars are increasingly being recognised as an essential component of the infrastructure required for the development of smart cities. Despite this, driverless cars are vulnerable to a wide variety of cyberattack vectors, which puts the lives of people in jeopardy. Therefore, the purpose of this work was to design, create and evaluate an intelligent anomaly detection system for autonomous cars. In this study, we propose an IDS that is able to detect anomalies in the CAN bus in intra-vehicular networks using ML models. In this study, an in-depth discussion of the vulnerabilities of the CAN bus was presented, along with the reasons for which AIDS is necessary in this particular field and the different categories of attack that CAN busses may be subjected to, as well as the effects such attacks may have on cars and drivers.
Therefore, the purpose of this research was to investigate potential security flaws arising from the presence of adware and malware inside autonomous car systems. In order to identify potentially harmful activities taking place in the network in the module, the network traffic was studied. In addition, an intrusion detection module based on ML and deep learning was presented for the detection of malware. This module uses techniques such as the k-nearest neighbour (KNN) and decision tree, long short-term memory (LSTM) and deep autoencoder methods. In conclusion, an ML system was presented that, with a high degree of precision and in a very short amount of time, is able to identify malware in automobiles. Metrics such as mean square error (MSE), root mean square error (RMSE) and correlation coefficient (R2) were assessed during the validation phase. This investigation led to the identification of the errors that persist between the expected output and the target values. The prediction errors generated when using the KNN and decision tree, LSTM and deep autoencoder algorithms were greatly reduced when used for binary classification and multi-class classification.
We evaluated the accuracy of the suggested system by comparing it to the accuracy of currently available systems. In addition, we discovered that the deep autoencoder method achieved a high level of accuracy (99.98%) when using the Car-Hacking dataset and an accuracy of 98.09 when using the UNSW-NB15 dataset, when tested against a variety of current systems, thus demonstrating that it is appropriate for real-time malware identification in scenarios involving AVs. The empirical findings demonstrate that the suggested algorithms are capable of recognising attack messages. The proposed systems were shown to be able to effectively detect anomalous packets in order to safeguard the CAN bus. They may also be extended to the design of various security system housed within the complex infrastructures of networks that characterise AVs in order to provide safe data processing. Our system will continue to evolve with the help of cutting-edge AI in the near future.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}