This section presents the maneuver planning obtained using the improved particle swarm optimization algorithm, demonstrating the maneuvering performance in terms of delta-v, accuracy, etc.
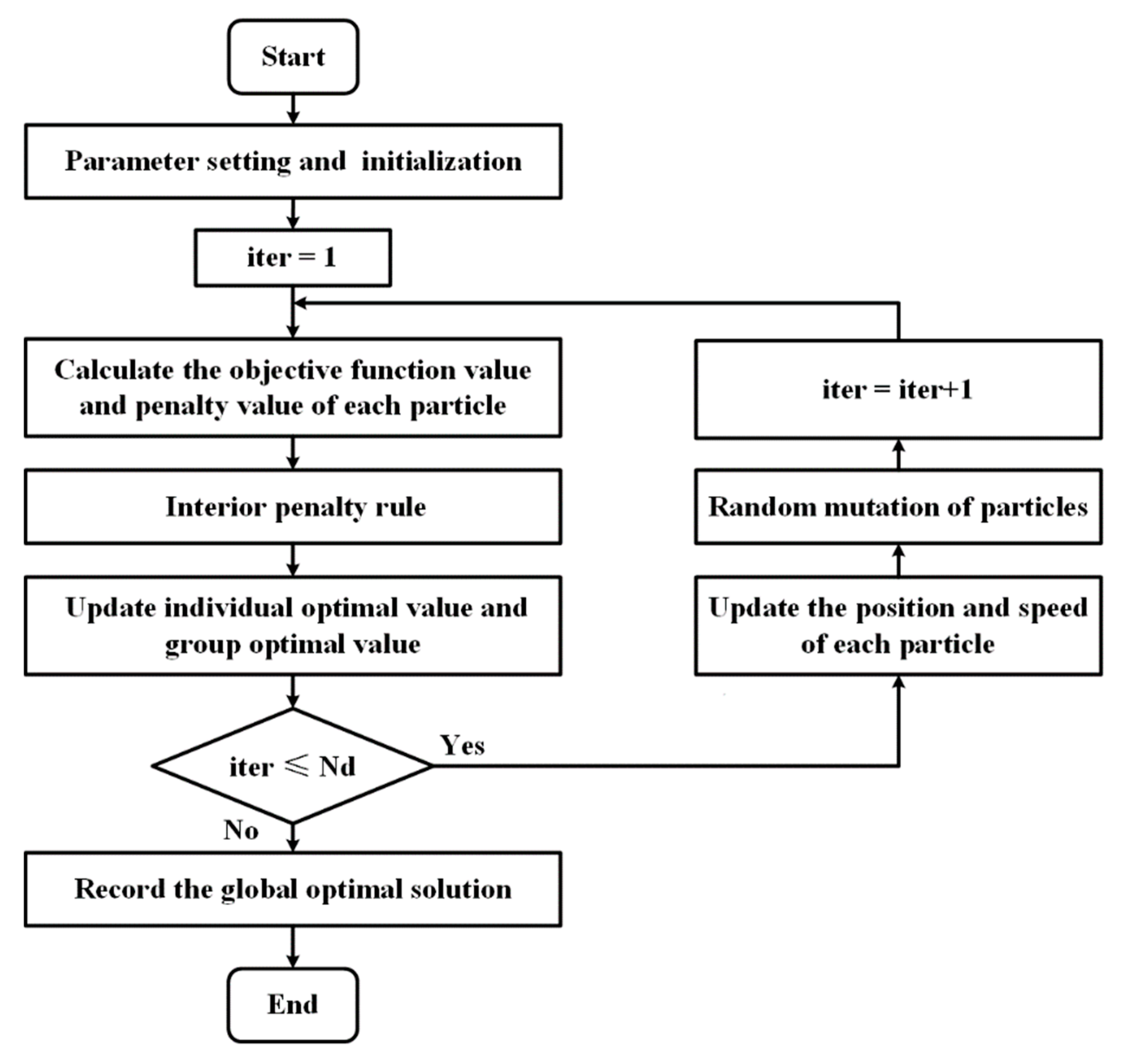
4.4. Fuel-Minimum Reconfiguration Maneuver Planning via IPSO
Assuming that the amplitude of the three axes of the thruster is [400, 400, 200] μN, six in-plane maneuvers, and four out-of-plane maneuvers are performed during the whole reconfiguration process, the given mission time is 14 days, the desired relative orbital elements are [0,0,0,0,0,0]T m, and the tolerances of the six relative orbital elements are [1,1,1,1,1,1]T m. In addition, set [3.1, 3.5] d, [11.5, 11.9] d as the maintenance phase of the instruments, during which the satellites are not available for formation control.
Firstly, as a comparison term to the strategy proposed in this paper, the near-Earth formation reconstruction strategy of the literature [
23] is directly transposed to the space gravitational wave mission, without discretization of the mission space and without normalization of the optimization variables. Simulation results are shown in
Figure 12,
Figure 13 and
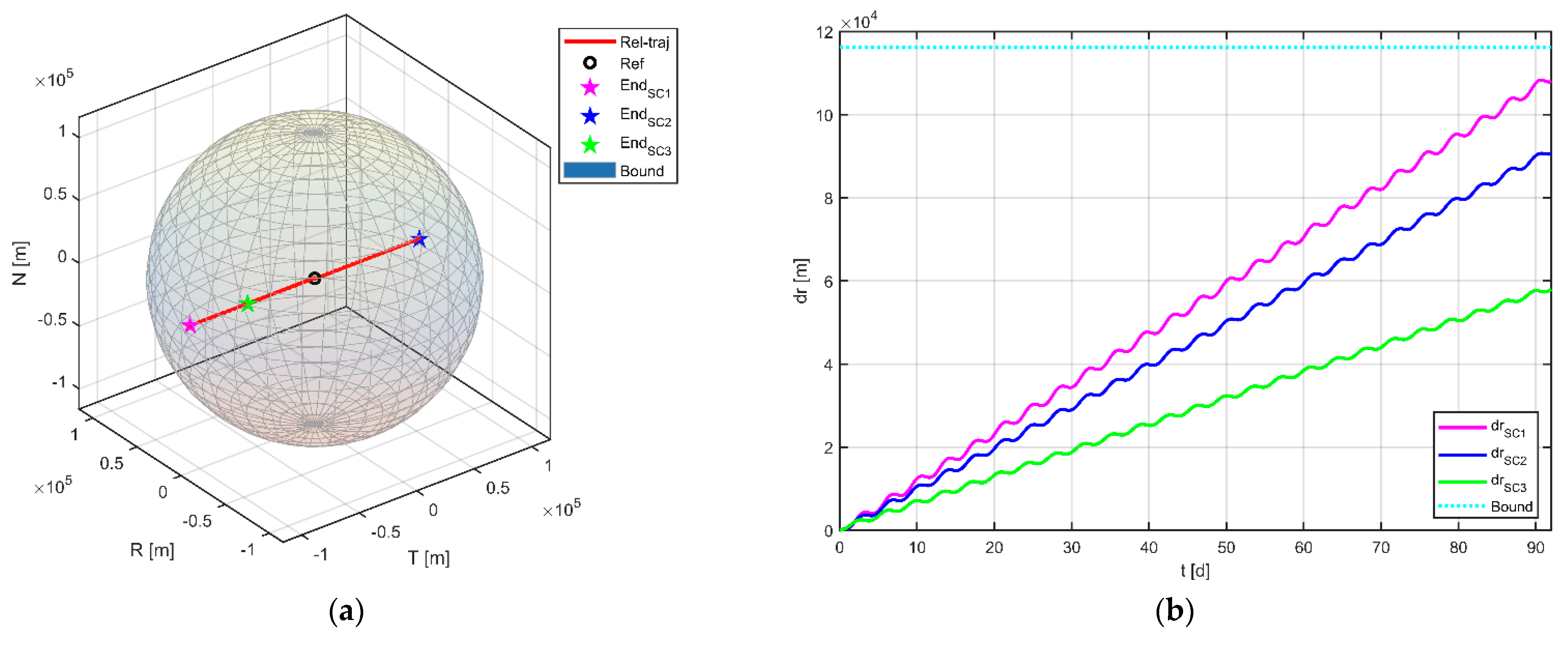
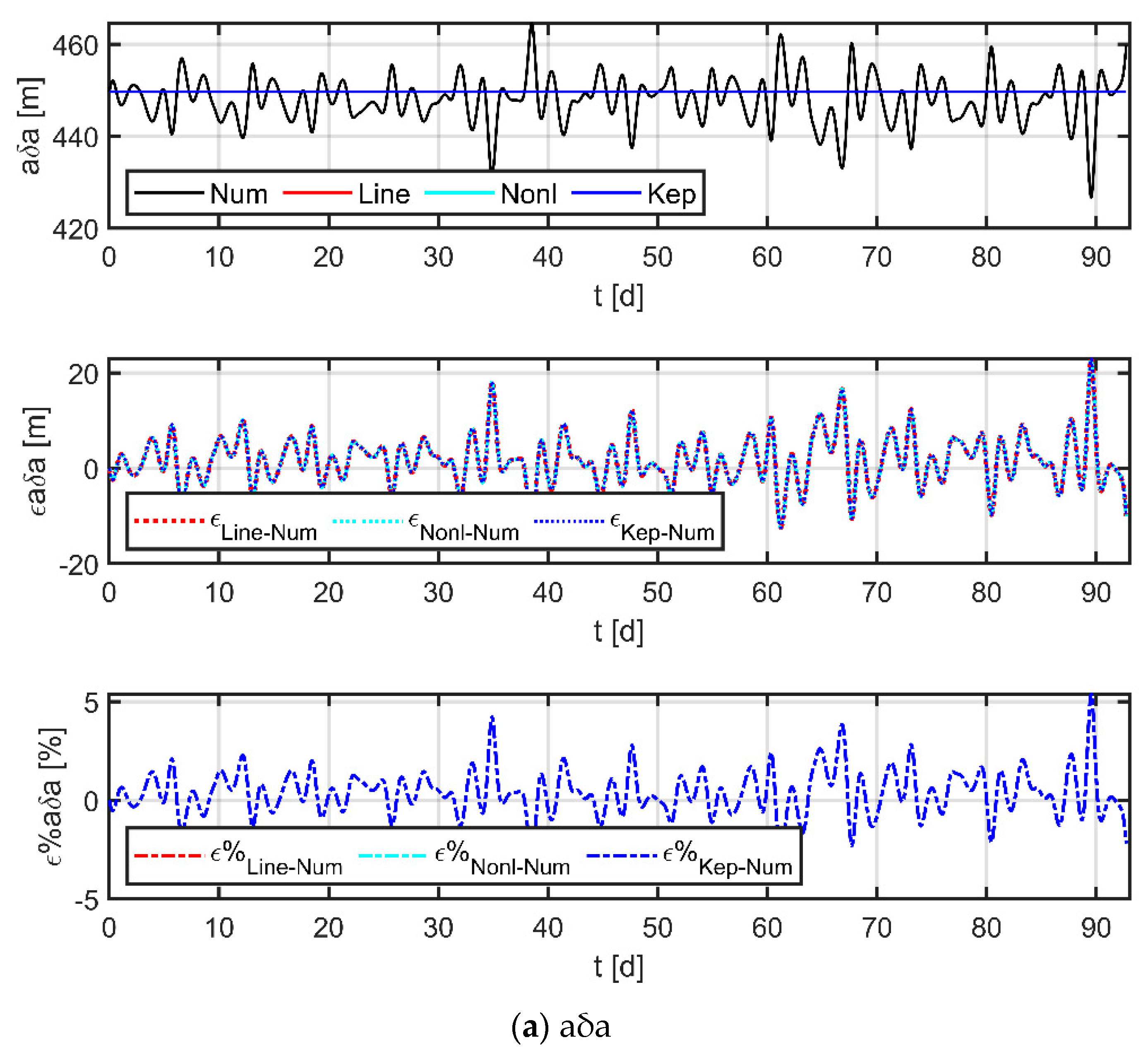
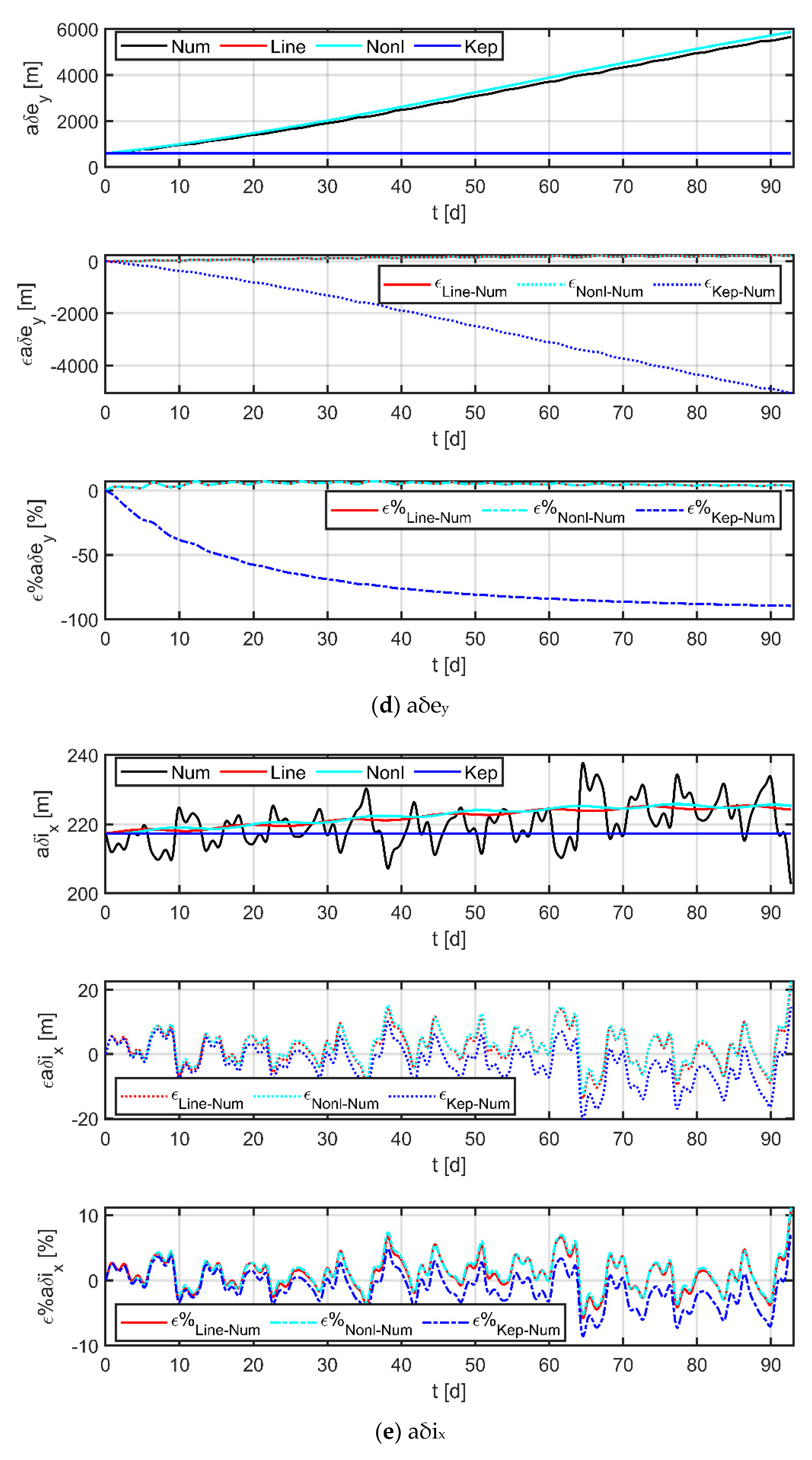
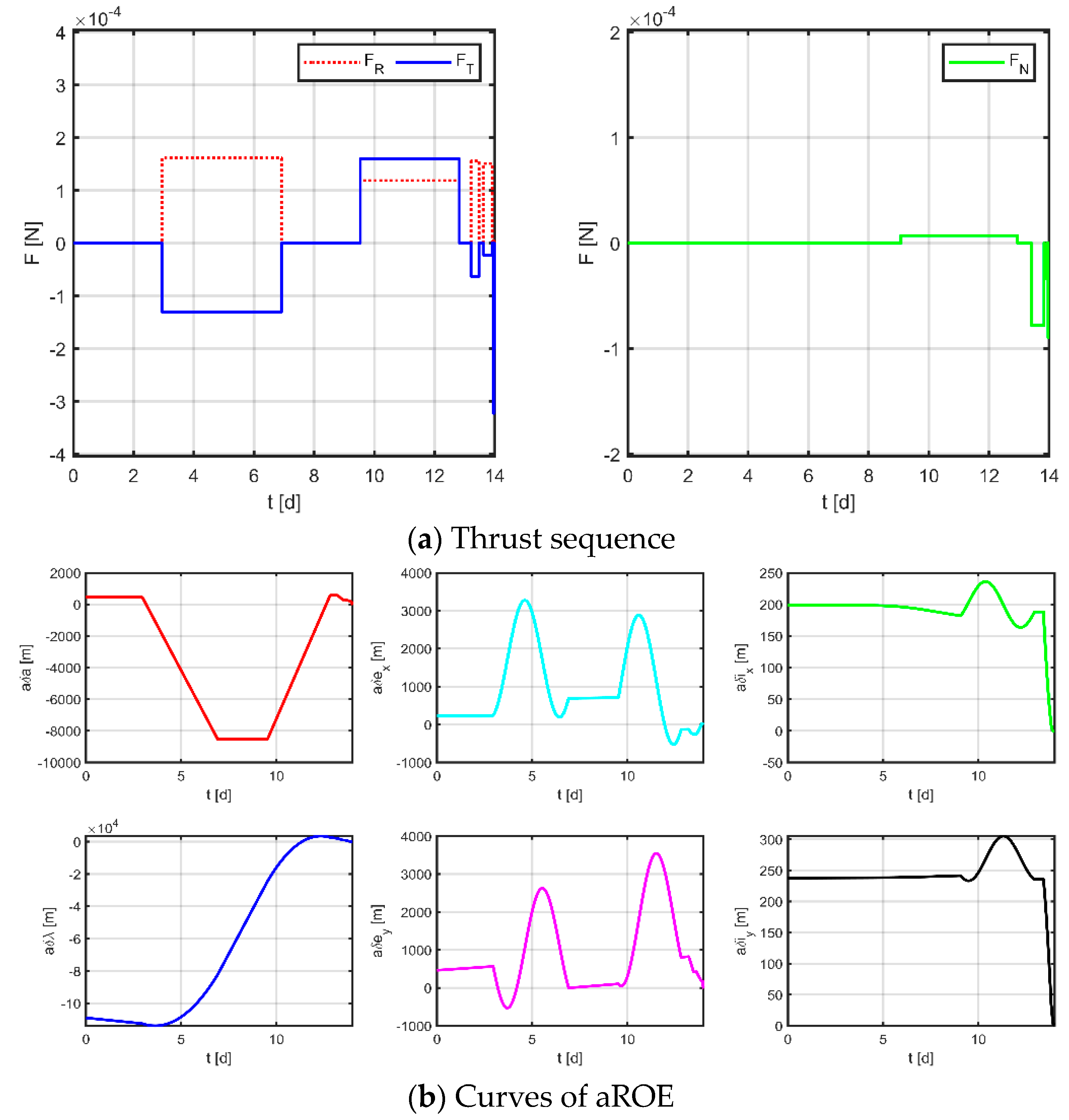
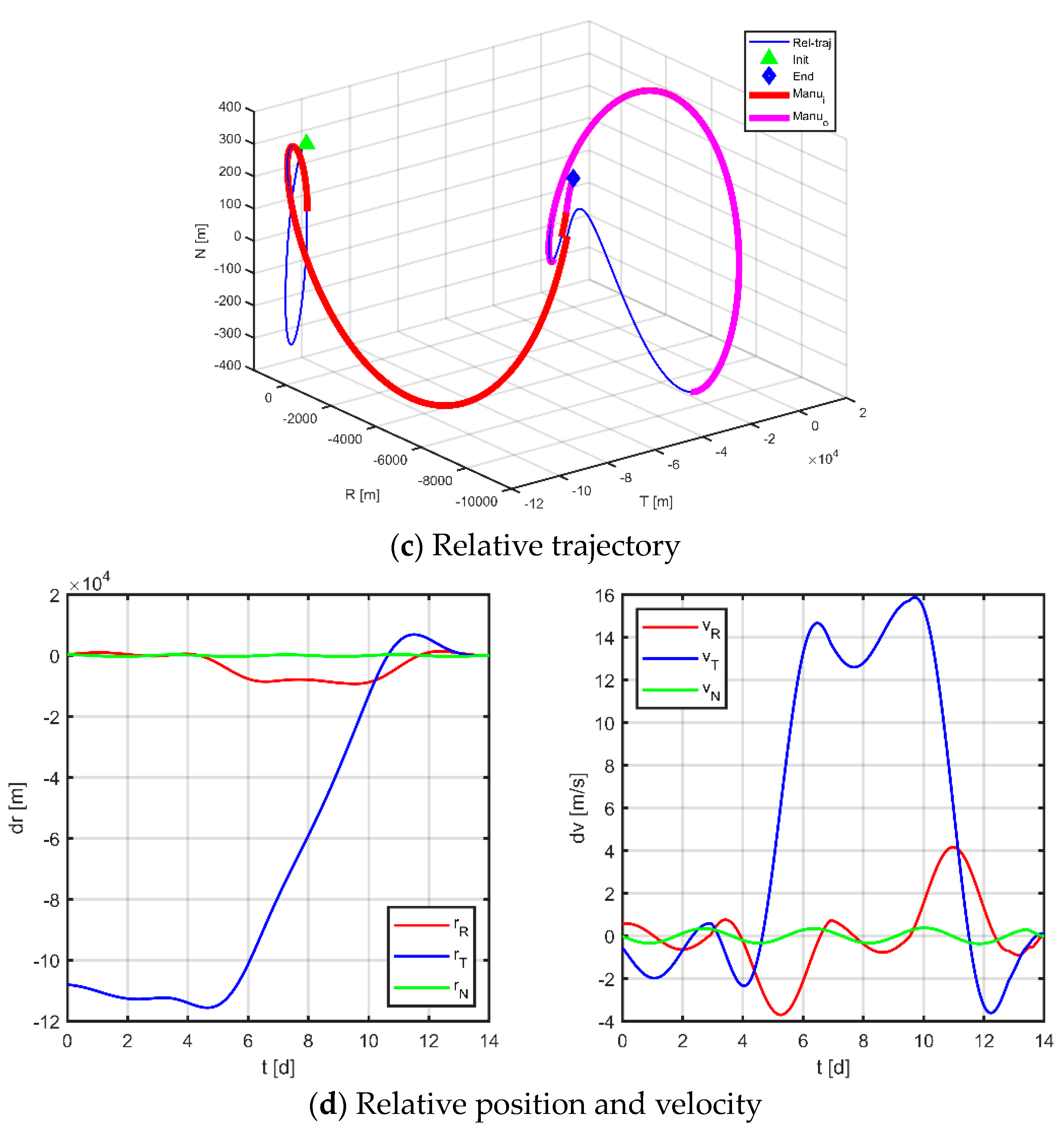
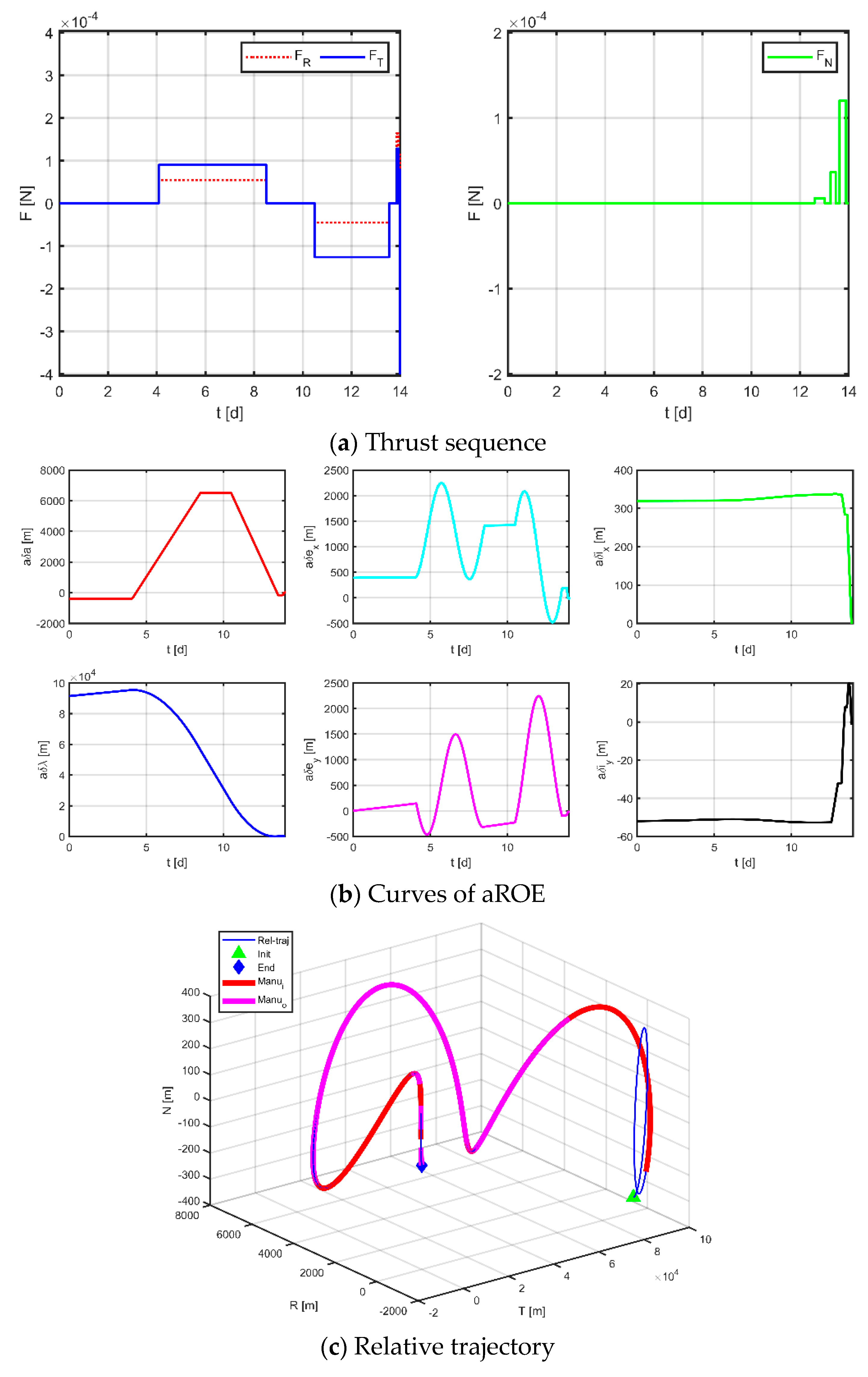
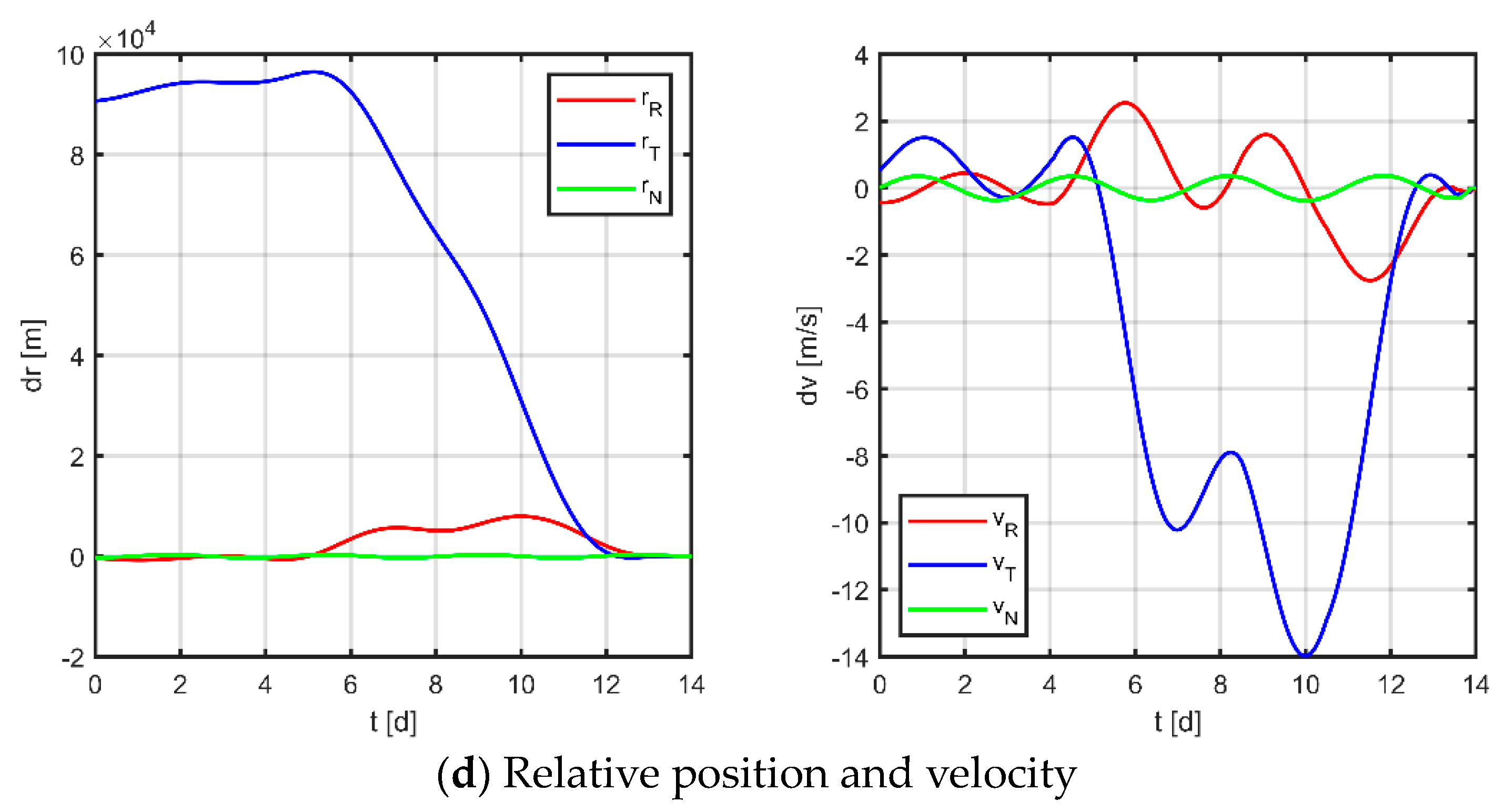
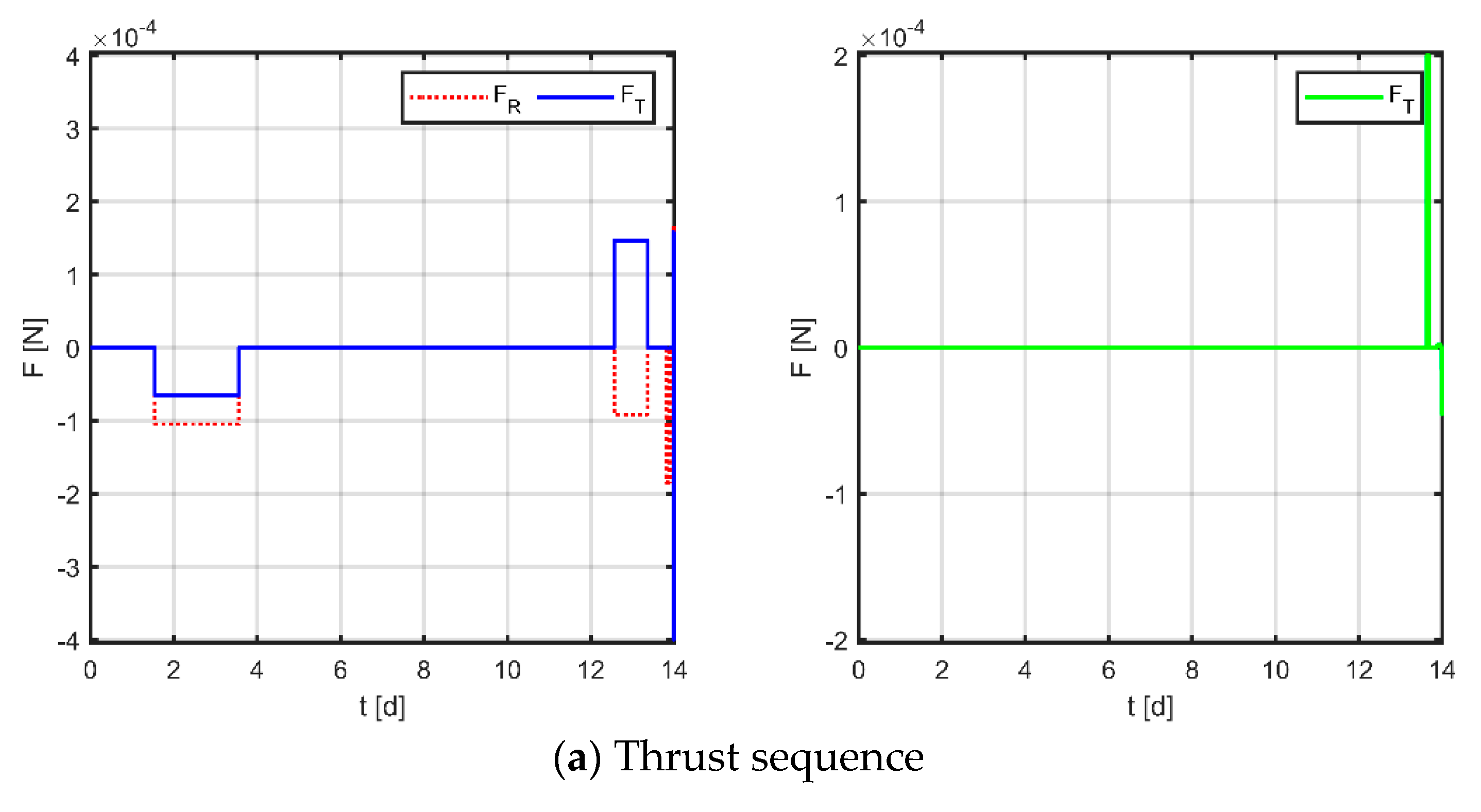
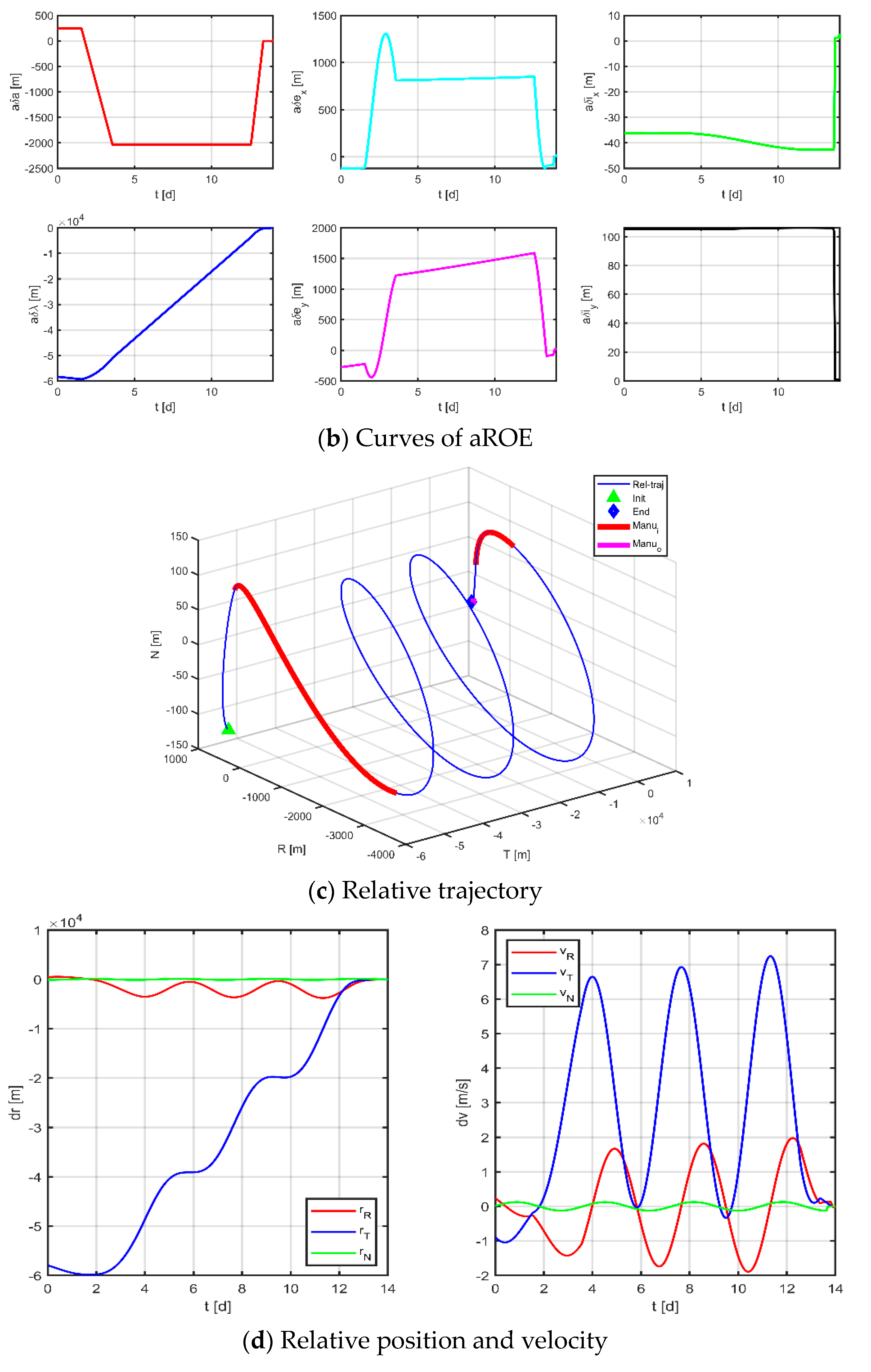
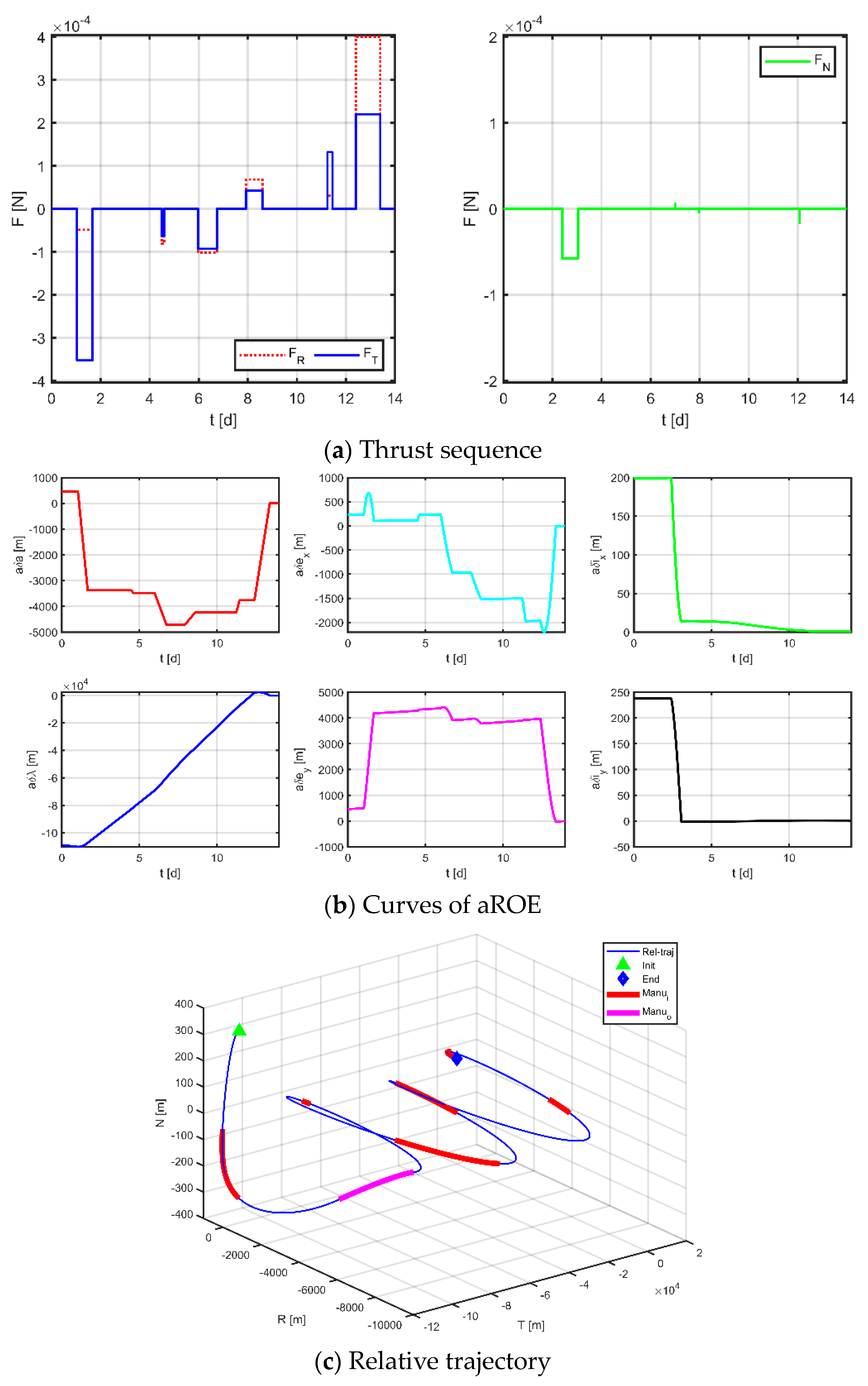
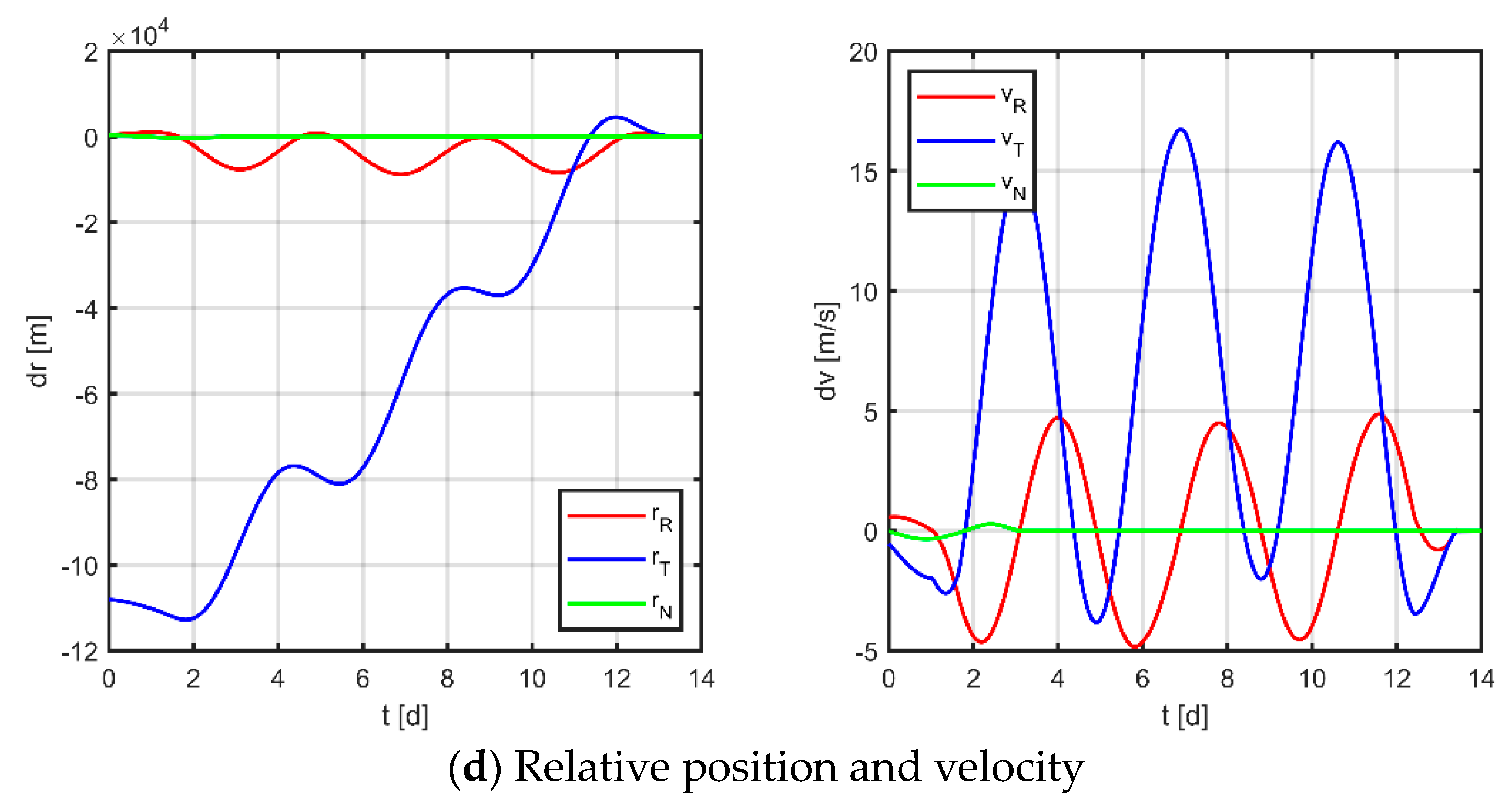
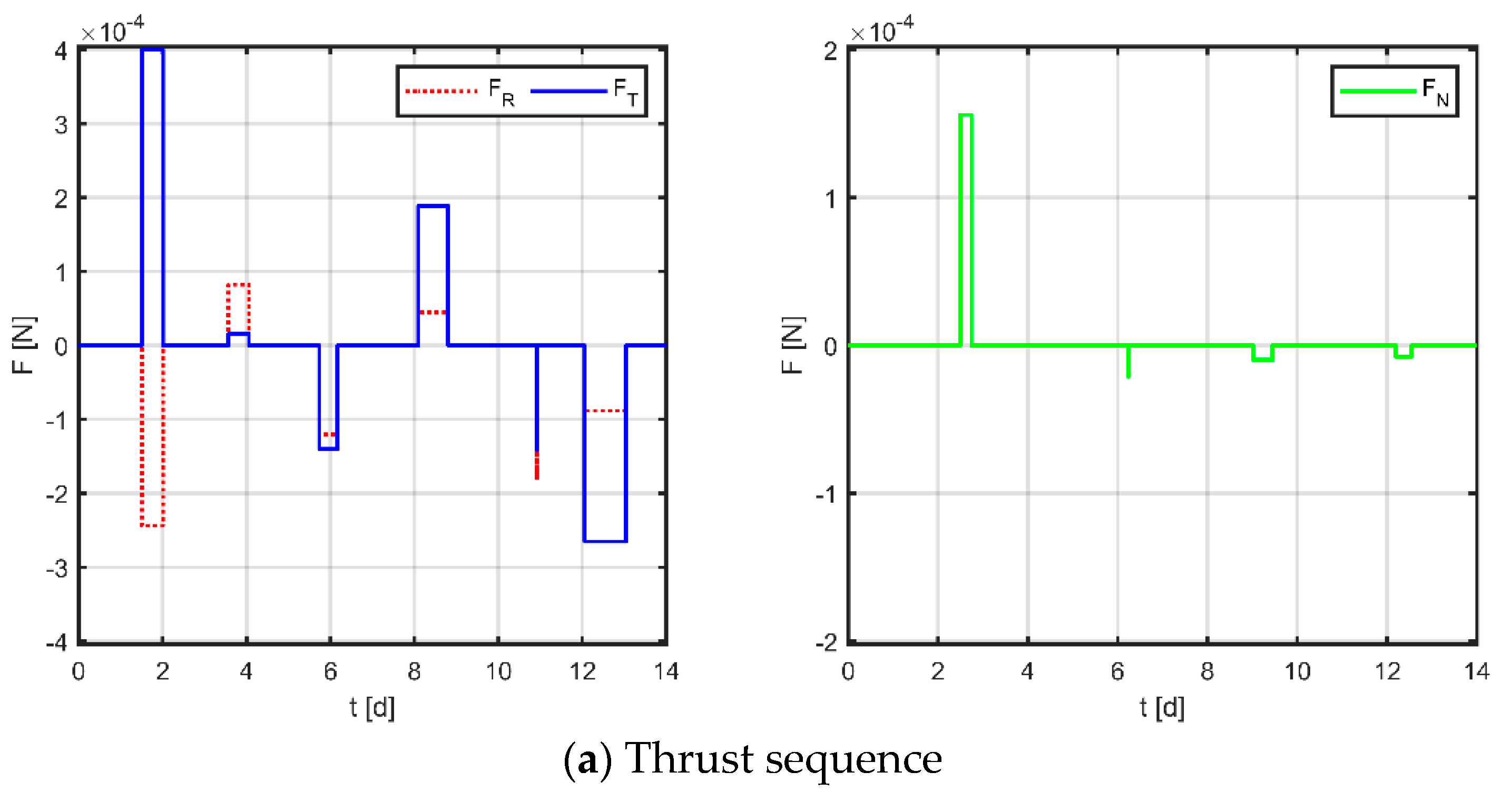
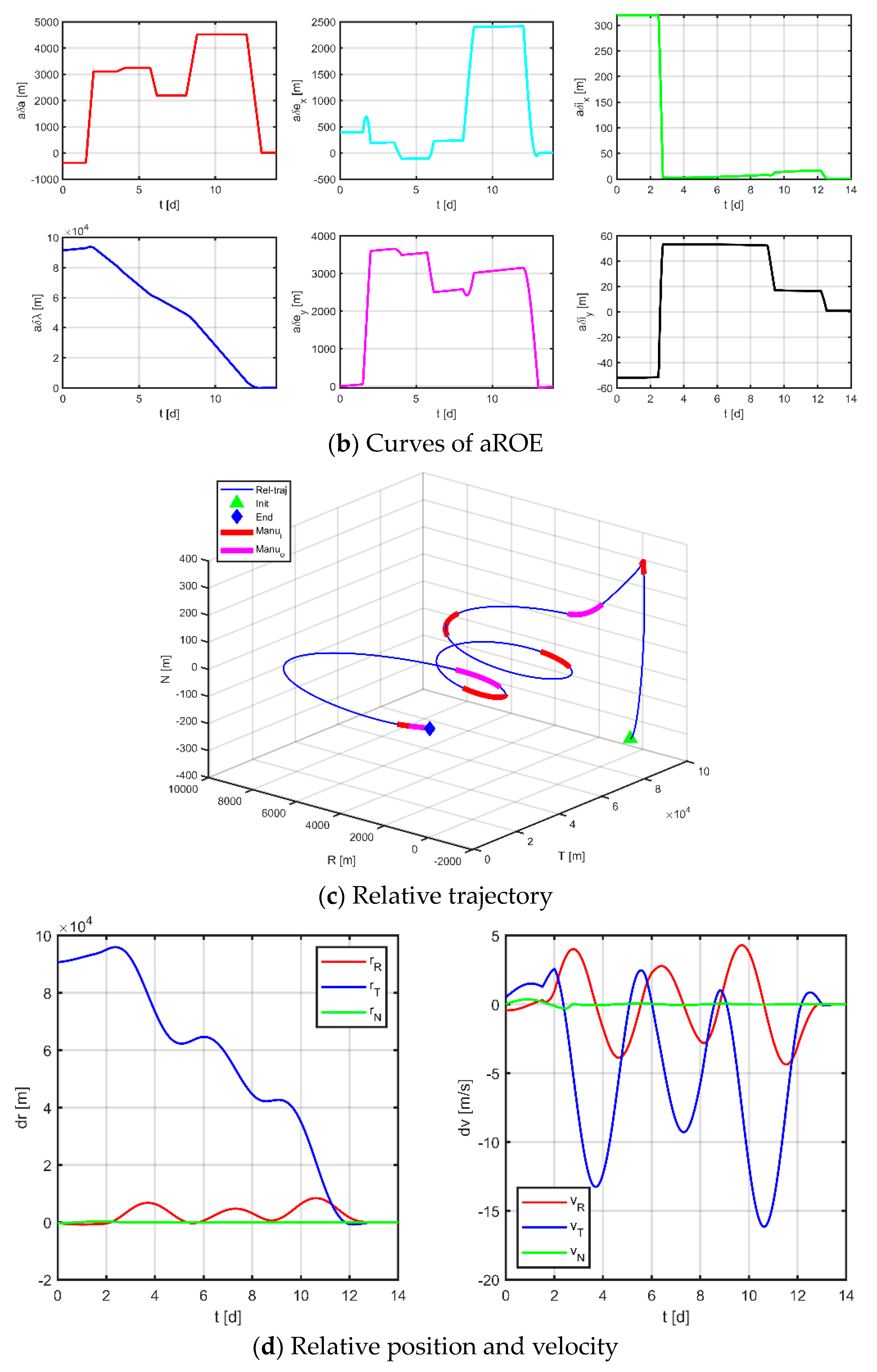
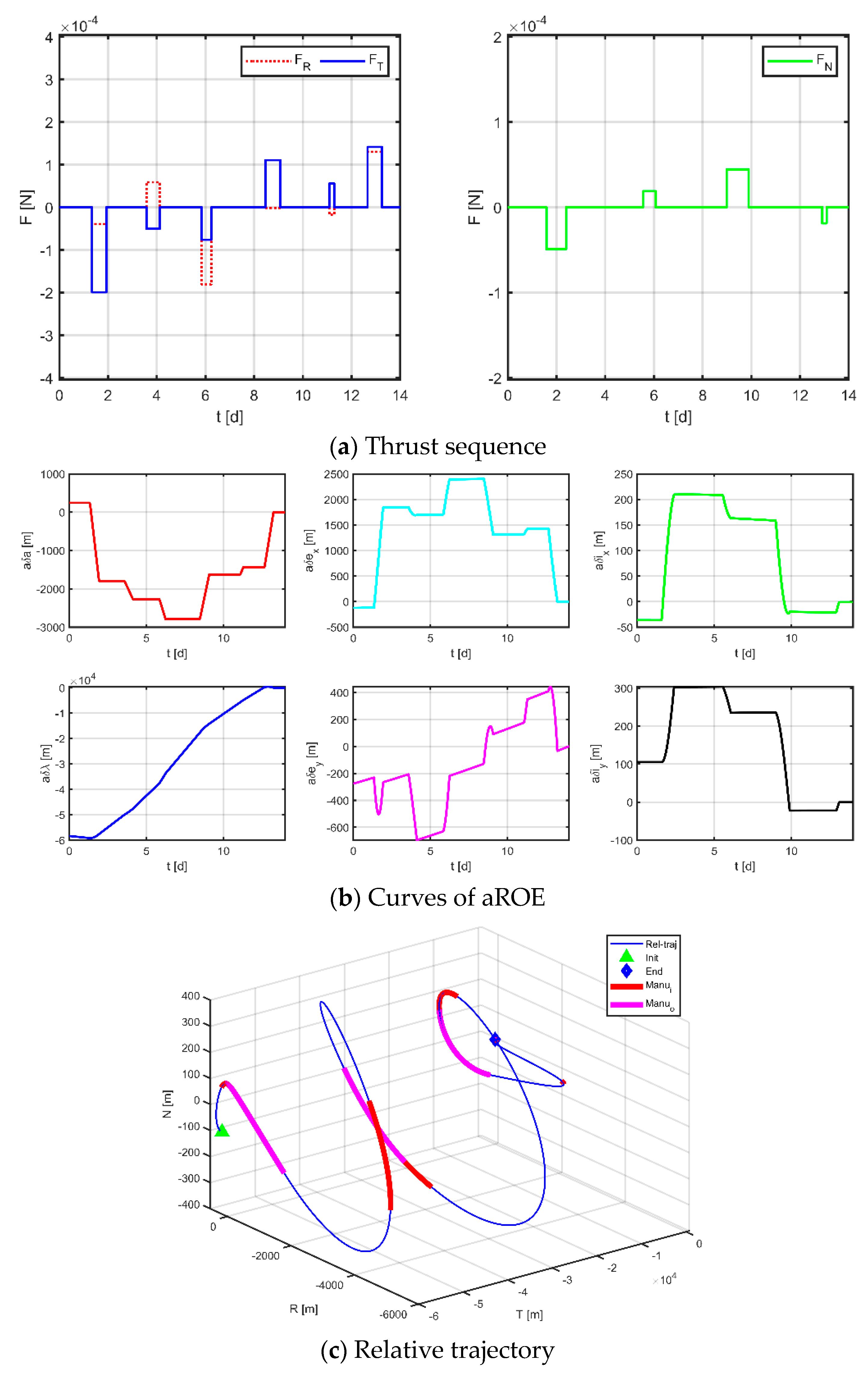
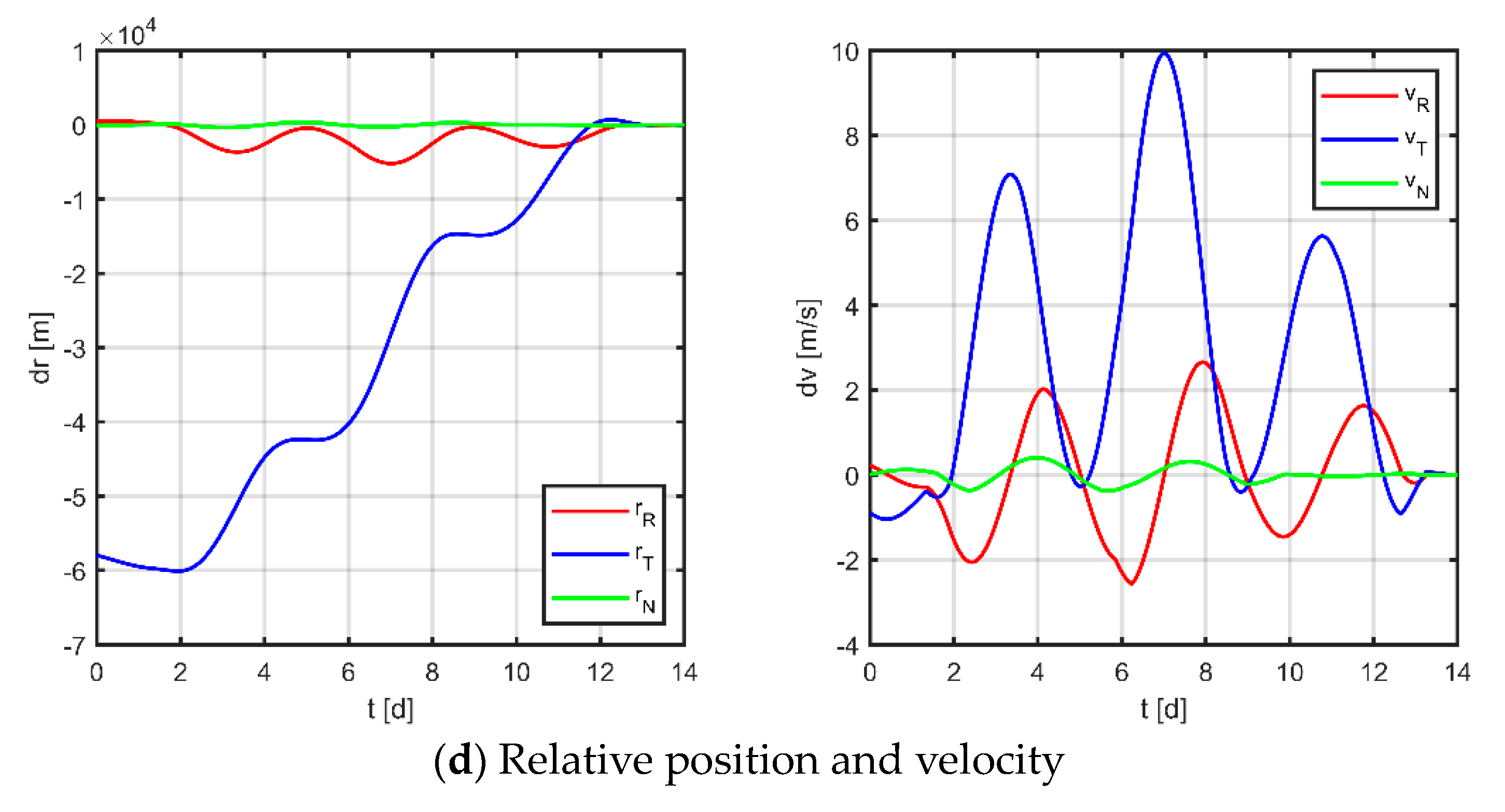
Figure 14, where subplot (a) is the optimized maneuver sequence, subplot (b) is the curves of the relative orbital elements throughout the control process, subplot (c) is the relative trajectory in the RTN coordinate system of the virtual reference spacecraft, and subplot (d) is the relative position and relative velocity curve in the virtual reference spacecraft RTN coordinate system. Subplots (c) and (d) are transformed by substituting the relative orbit element data into Equation (5), whose end states reflect the accuracy of the spacecraft tracking the reference trajectory.
The results for virtual formation 1 are shown in
Figure 12. For in-plane motion, the maneuvers’ times are [2.951, 6.914, 9.532, 12.824, 13.224, 13.478, 13.628, 13.912, 13.951, 13.978, 13.989, 13.997] d, the maneuvers’ magnitudes along the R-axis are [161.368, 118.499, 155.670, 150.948, 4.266, −48.326] μN, and the maneuvers’ magnitudes along the T-axis are [−131.078, 159.712, −63.487, −22.802, −322.770, −198.324] μN. For out-of-plane motion, the maneuvers’ times are [9.073, 12.946, 13.414, 13.831, 13.831, 13.920, 13.964, 13.966] d, and the magnitudes of the maneuvers along the N-axis are [7.101, −78.100, −34.080, −89.897] μN. Correspondingly, the total maneuvers’ cost is 0.3895 m/s, and the relative orbital elements converge to [0.981, −0.508, −0.671, −0.984, −0.999, 0.996]. The terminal relative position error is [2.008, −1.725, −1.064] m, and the terminal relative velocity error is [−0.667, −3.390, 1.024] mm/s.
The results for virtual formation 2 are shown in
Figure 13. For in-plane motion, the maneuvers’ times are [4.082, 8.504, 10.492, 13.548, 13.847, 13.922, 13.970, 13.987, 13.993, 13.996, 13.999, 13.999] d, the maneuvers’ magnitudes along the R-axis are [54.630, −45.172, 163.718, 114.186, 16.520, 65.087] μN, and the maneuvers’ magnitudes along the T-axis are [90.019, −126.130, 128.242, 78.819, −399.198, −36.733] μN. For out-of-plane motion, the maneuvers’ times are [5.900, 10.913, 12.594, 13.018, 13.255, 13.466, 13.616, 13.891] d, and the magnitudes of the maneuvers along the N-axis are [0, 5.697, 36.544, 120.304] μN. Correspondingly, the total maneuvers’ cost is 0.2130 m/s, and the relative orbital elements converge to [0.977, −0.830, 0.995, −0.973, 0.990, −0.980]. The terminal relative position error is [1.441, −3.454, −1.315] m, and the terminal relative velocity error is [−1.459, −2.647, 0.506] mm/s.
The results for virtual formation 3 are shown in
Figure 14. For in-plane motion, the maneuvers’ times are [1.544, 3.564, 12.564, 13.365, 13.810, 13.891, 13.976, 13.982, 13.988, 13.988, 13.992, 14] d, the maneuvers’ magnitudes along the R-axis are [−104.884, −91.683, −184.478, 167.947, 141.187, 160.740] μN, and the maneuvers’ magnitudes along the T-axis are [−65.187, 146.413, −1.056, 158.838, −400.000, −67.483] μN. For out-of-plane motion, the maneuvers’ times are [13.628, 13.694, 13.880, 13.970, 13.990, 13.993, 13.994, 13.997] d, and the magnitudes of the maneuvers along the N-axis are [200.000, 1.824, −15.123, −45.862] μN. Correspondingly, the total maneuvers’ cost is 0.0979 m/s, and the relative orbital elements converge to [0.964, −0.278, 0.705, 0.472, 0.879, 0.0979]. The terminal relative position error is [−0.641, −1.847, −1.268] m, and the terminal relative velocity error is [−0.867, −0.847, 2.290] mm/s.
Secondly, applying the method proposed in
Section 3.1 to the discrete entire task interval, each subinterval of the in-plane is [0, 3.10] d, [3.50, 4.67] d, [4.67, 7.00] d, [7.00, 9.33] d, [9.33, 11.50] d, [11.90, 14] d; each subinterval of the out-of-plane is [0, 3.10] d, [3.50, 7.00] d, [7.0, 11.50] d, [11.90, 14.00] d, and only one maneuver is allowed in each interval.
Figure 15,
Figure 16 and
Figure 17 demonstrate the simulation results.
The results for virtual formation 1 are shown in
Figure 16. For in-plane motion, the maneuvers’ times are [1.037, 1.665, 4.494, 4.589, 5.977, 6.743, 7.931, 8.596, 11.246, 11.452, 12.414, 13.400] d, the maneuvers’ magnitudes along the R-axis are [−48.437, −81.167, −102.014, 68.190, 30.341, 400.000] μN, and the maneuvers’ magnitudes along the T-axis are [−352.682, −63.399, −93.112, 41.924, 131.971, 220.195] μN. For out-of-plane motion, the maneuvers’ times are [2.409, 3.047, 7.000, 7.000, 7.972, 7.972, 12.081, 12.081] d, and the magnitudes of the maneuvers along the N-axis are [−57.567, 6.132, −4.178, −16.619] μN. Correspondingly, the total maneuvers’ cost is 0.2023 m/s, and the relative orbital elements converge to [−0.383, −0.920, −0.954, −0.909, 0.999, 0.998] m. The terminal relative position error is [0.588, −2.702, 0.931] m, and the terminal relative velocity error is [−0.985, −1.512, 1.176] mm/s.
The results for virtual formation 2 are shown in
Figure 17. For in-plane motion, the maneuvers’ times are [1.507, 2.011, 3.568, 4.056, 5.732, 6.167, 8.091, 8.804, 10.925, 10.925, 12.056, 13.040] d, the maneuvers’ magnitudes along the R-axis are [−104.884, −91.683, −184.478, 167.947, 141.187, 160.740] μN, and the maneuvers’ magnitudes along the T-axis are [400.000, 15.861, −140.128, 188.800, −141.672, −265.133] μN. For out-of-plane motion, the maneuvers’ times are [2.499, 2.747, 6.241, 6.242, 9.016, 9.450, 12.196, 12.541] d, and the magnitudes of the maneuvers along the N-axis are [155.973, −211.180, −9.594, −7.557] μN. Correspondingly, the total maneuvers’ cost is 0.1806 m/s, and the relative orbital elements converge to [−0.997, 0.328, 0.999, −0.733, 0.970, 0.935]. The terminal relative position error is [−0.423, −1.868, 0.411] m, and the terminal relative velocity error is [−1.214, 0.385, −1.418] mm/s.
The results for virtual formation 3 are shown in
Figure 17. For in-plane motion, the maneuvers’ times are [1.229, 1.929, 3.581, 4.125, 5.847, 6.241, 8.469, 6.241, 8.469, 9.077, 11.091, 11.290, 12.661, 13.246] d, the maneuvers’ magnitudes along the R-axis are [−39.302, 58.738, 180.544, −1.430, −17.756, 130.166] μN, and the maneuvers’ magnitudes along the T-axis are [−199.369, −50.448, −76.154, 110.663, 55.742, 141.606] μN. For out-of-plane motion, the maneuvers’ times are [1.585, 2.390, 5.554, 6.074, 8.988, 9.892, 12.915, 13.096] d, and the magnitudes of the maneuvers along the N-axis are [−49.114, 18.886, 44.440, −18.813] μN. Correspondingly, the total maneuvers’ cost is 0.1100 m/s, and the relative orbital elements converge to [0.768, −0.622, 0.349, 1.000, −0.995, −0.435]. The terminal relative position error is [1.036, −2.671, 0.916] m, and the terminal relative velocity error is [−1.133, −1.865, −0.646] mm/s.
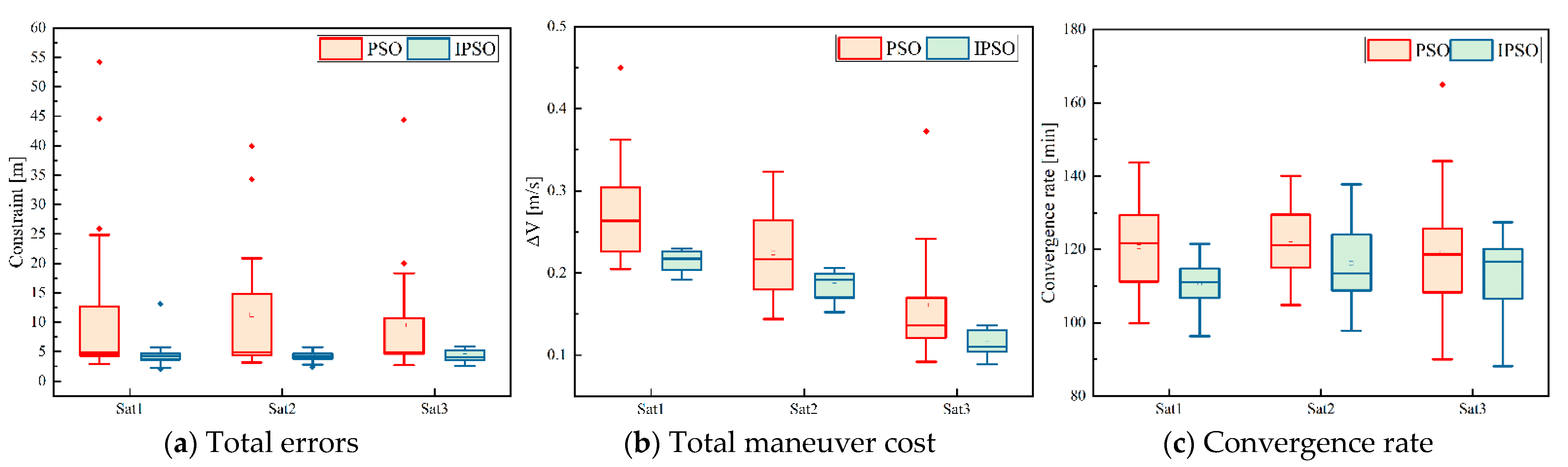
Comparing the results of the two approaches, it can be seen that both methods can obtain maneuver solutions that satisfy the dynamical constraints; however, there are some differences in the maneuver cost and maneuver distribution. Firstly, in terms of the maneuver cost, theoretically analyzed, the conventional method does not constrain the complete solution space and is supposed to obtain a relatively better solution, but from the actual results, the delta-v consumptions of the three satellites obtained by the two methods are [0.3895, 0.2130, 0.0979] m/s and [0.2030, 0.1806, 0.1100] m/s, respectively. The proposed method performs better instead. This phenomenon may be caused by two reasons: one because the algorithm easily falls into local optimum due to a large number of variables and complex constraints of the problem under study; another is that the conventional method does not normalize the variables, which is not beneficial to the convergence of the solution. Second, in terms of the distribution of maneuver profiles, the maneuver profiles obtained using the conventional method tend to impose two maneuvers of longer duration followed by a series of short-duration maneuvers for quick adjustment in the final stage. In contrast, the maneuver solutions obtained by the method proposed in this paper are more uniform regarding the location and duration of each maneuver due to the discretization of the mission time. Finally, in terms of accuracy, both methods have comparable accuracy, and the maximum relative position error is no more than 4 m and the maximum relative velocity error is no more than 4 mm/s. It should be noted that some factors in the paper (e.g., random variation probability, inertia factor, learning factor, penalty factor, etc.) are set empirically, which will affect the performance of the algorithm to some extent; in addition, the discretization method of the whole task interval will also affect the acquisition of the optimal solution.
To verify the universality of the proposed method,
Table 7 and
Table 8 are obtained by applying the method to different thruster schemes and different given mission times. In different thruster schemes, the mission time is limited to 14 d; in different given mission time schemes, the thruster amplitude is given as [400, 400, 200] μN. The simulation results show that the proposed method is well-suited and flexible enough to meet the possible formation reconfiguration requirements in space gravitational wave missions. In addition, the data in
Table 7 show that the total delta-v does not present a clear regularity as the thruster amplitude changes. The data in
Table 8 show that the total delta-v generally tends to decrease and then increases with the gradual increase in the given mission time, which is because part of the offset of
can be corrected by the natural dynamics established by
, the divergence dominating again with the prolongation of the task time. It should be noted that the above analysis is limited to the phenomenon presented in this study and cannot be taken as a general rule.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}