
Wide-Angular Tolerance Optical Filter Design and Its Application to Green Pepper Segmentation †




Abstract
1. Introduction
- We build the automatic wide-angular tolerance optical filter design framework. In such a framework, we model the thickness of each thin film layer as the differentiation parameters. As a result, we can utilize the autograd engine to optimize the thickness of each thin layer automatically.
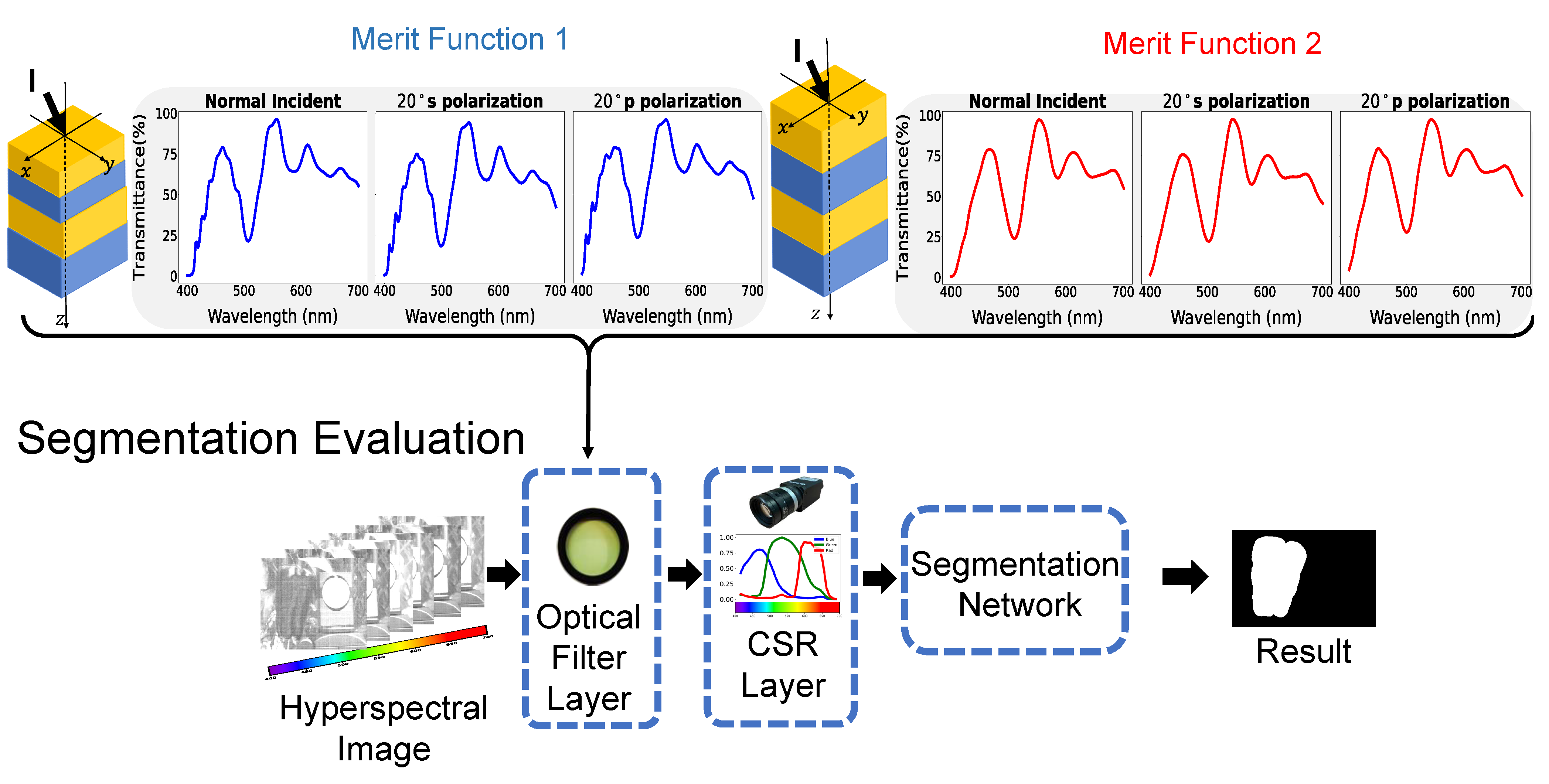
- To verify the benefits of wide-angular optical filter design in applications, we connected the wide-angular transmittance curve with the segmentation network and evaluated it on the green pepper hyperspectral dataset. The wide-angular optical filter design can yield better results and demonstrate improvement in the segmentation problems.
2. Methodology
2.1. Transfer Matrix Method
2.2. Optical Merit Function
3. Results
3.1. Optimized Transmittance Curve
3.2. Green Pepper Segmentation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TaO | Tantalum Pentoxide |
| SiO | Silicon Dioxide |
| TR | Transmittance curve |
| MAE | Mean Absolute Error |
| mIoU | Mean Intersection over Union |
| CSR | Camera Spectral Response |
References
- Liu, C.; Gu, J. Discriminative illumination: Per-pixel classification of raw materials based on optimal projections of spectral BRDF. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 86–98. [Google Scholar]
- Blasinski, H.; Farrell, J.; Wandell, B. Designing illuminant spectral power distributions for surface classification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2164–2173. [Google Scholar]
- Yu, J.; Kurihara, T.; Zhan, S. Optical filter net: A spectral-aware rgb camera framework for effective green pepper segmentation. IEEE Access 2021, 9, 90142–90152. [Google Scholar] [CrossRef]
- Yu, J.; Kurihara, T.; Zhan, S. Color-Ratio Maps Enhanced Optical Filter Design and Its Application in Green Pepper Segmentation. Sensors 2021, 21, 6437. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Liu, J.; Wang, Y.; Zhou, J.; Wang, C.; Lu, H. Stacked deconvolutional network for semantic segmentation. IEEE Trans. Image Process 2019. [Google Scholar] [CrossRef] [PubMed]
- Chang, J.; Wetzstein, G. Deep optics for monocular depth estimation and 3d object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 10193–10202. [Google Scholar]
- Zhang, Q.; Yu, Z.; Liu, X.; Wang, C.; Zheng, Z. End-to-end joint optimization of metasurface and image processing for compact snapshot hyperspectral imaging. Opt. Commun. 2022, 530, 129154. [Google Scholar] [CrossRef]
- Liu, Y.Q.; Che, Y.; Qi, K.; Li, L.; Yin, H. Design and demonstration of a wide-angle and high-efficient planar metasurface lens. Opt. Commun. 2020, 474, 126061. [Google Scholar] [CrossRef]
- Optical Filters for Intel® RealSenseTM Depth Cameras D400. Available online: https://dev.intelrealsense.com/docs/optical-filters-for-intel-realsense-depth-cameras-d400 (accessed on 5 November 2022).
- Major, K.J.; Poutous, M.K.; Ewing, K.J.; Dunnill, K.F.; Sanghera, J.S.; Aggarwal, I.D. Optical filter selection for high confidence discrimination of strongly overlapping infrared chemical spectra. Anal. Chem. 2015, 87, 8798–8808. [Google Scholar] [CrossRef]
- Finlayson, G.D.; Zhu, Y. Designing color filters that make cameras more colorimetric. IEEE Trans. Image Process. 2020, 30, 853–867. [Google Scholar] [CrossRef]
- Hyttinen, J.; Fält, P.; Jäsberg, H.; Kullaa, A.; Hauta-Kasari, M. Optical implementation of partially negative filters using a spectrally tunable light source, and its application to contrast enhanced oral and dental imaging. Opt. Express 2019, 27, 34022–34037. [Google Scholar] [CrossRef]
- Tikhonravov, A.V.; Trubetskov, M.K.; DeBell, G.W. Application of the needle optimization technique to the design of optical coatings. Appl. Opt. 1996, 35, 5493–5508. [Google Scholar] [CrossRef]
- Liu, D.; Tan, Y.; Khoram, E.; Yu, Z. Training deep neural networks for the inverse design of nanophotonic structures. ACS Photonics 2018, 5, 1365–1369. [Google Scholar] [CrossRef]
- Luce, A.; Mahdavi, A.; Wankerl, H.; Marquardt, F. Investigation of inverse design of multilayer thin-films with conditional invertible Neural Networks. arXiv 2022, arXiv:2210.04629. [Google Scholar] [CrossRef]
- Jiang, A.; Osamu, Y.; Chen, L. Multilayer optical thin film design with deep Q learning. Sci. Rep. 2020, 10, 12780. [Google Scholar] [CrossRef]
- Wang, H.; Zheng, Z.; Ji, C.; Guo, L.J. Automated multi-layer optical design via deep reinforcement learning. Mach. Learn. Sci. Technol. 2021, 2, 025013. [Google Scholar] [CrossRef]
- Jen, Y.J.; Lin, M.J. Design and fabrication of a narrow bandpass filter with low dependence on angle of incidence. Coatings 2018, 8, 231. [Google Scholar] [CrossRef]
- Baydin, A.G.; Pearlmutter, B.A.; Radul, A.A.; Siskind, J.M. Automatic differentiation in machine learning: A survey. J. Mach. Learn. Res. 2018, 18, 1–43. [Google Scholar]
- Liu, Q.; Li, Q.; Sun, Y.; Chai, Q.; Zhang, B.; Liu, C.; Liu, W.; Sun, J.; Ren, Z.; Chu, P.K. Transfer matrix method for simulation of the fiber Bragg grating in polarization maintaining fiber. Opt. Commun. 2019, 452, 185–188. [Google Scholar] [CrossRef]
- Luce, A.; Mahdavi, A.; Marquardt, F.; Wankerl, H. TMM-Fast, a transfer matrix computation package for multilayer thin-film optimization: Tutorial. JOSA A 2022, 39, 1007–1013. [Google Scholar] [CrossRef]
- Yu, J.; Kurihara, T. Optimization of optical thin film to improve angular tolerance for automatic design by deep neural networks. In Proceedings of the 2022 61st Annual Conference of the Society of Instrument and Control Engineers (SICE), Kumamoto, Japan, 6–9 September 2022; pp. 598–603. [Google Scholar]
- Mackay, T.G.; Lakhtakia, A. The transfer-matrix method in electromagnetics and optics. Synth. Lect. Electromagn. 2020, 1, 1–126. [Google Scholar]
- Feder, D.P. Calculation of an optical merit function and its derivatives with respect to the system parameters. JOSA 1957, 47, 913–925. [Google Scholar] [CrossRef]
- Triton 5.0 MP Model (IMX264). Available online: https://thinklucid.com/product/triton-5-mp-imx264/ (accessed on 5 December 2022).
- Byrd, R.H.; Lu, P.; Nocedal, J.; Zhu, C. A limited memory algorithm for bound constrained optimization. SIAM J. Sci. Comput. 1995, 16, 1190–1208. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental algorithms for scientific computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Minaee, S.; Boykov, Y.; Porikli, F.; Plaza, A.; Kehtarnavaz, N.; Terzopoulos, D. Image segmentation using deep learning: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3523–3542. [Google Scholar] [CrossRef] [PubMed]
- Yeung, C.; Tsai, R.; Pham, B.; King, B.; Kawagoe, Y.; Ho, D.; Liang, J.; Knight, M.W.; Raman, A.P. Global inverse design across multiple photonic structure classes using generative deep learning. Adv. Opt. Mater. 2021, 9, 2100548. [Google Scholar] [CrossRef]
- Goodfellow Ian, J.; Jean, P.A.; Mehdi, M.; Bing, X.; David, W.F.; Sherjil, O.; Courville Aaron, C. Generative adversarial nets. In Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; Volume 2, pp. 2672–2680. [Google Scholar]
- Schnell, P.; Holl, P.; Thuerey, N. Half-Inverse Gradients for Physical Deep Learning. arXiv 2022, arXiv:2203.10131. [Google Scholar]
- Lininger, A.; Hinczewski, M.; Strangi, G. General Inverse Design of Layered Thin-Film Materials with Convolutional Neural Networks. ACS Photonics 2021, 8, 3641–3650. [Google Scholar] [CrossRef]
- Macleod, H.A.; Macleod, H.A. Thin-Film Optical Filters; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Green Pepper Filter | Merit1 | Merit2 | |
|---|---|---|---|---|
| Angle | ||||
| 0° | 0.0035 | 0.0445 | 0.0592 | |
| 20° s polarization | 0.0875 | 0.0498 | 0.0292 | |
| 20° p polarization | 0.0994 | 0.0484 | 0.0403 | |
| Method | Incident Angle | mIoU | |
|---|---|---|---|
| Green Pepper Filter | 0.882 | ||
| s | 0.879 | ||
| p | 0.875 | ||
| Merit 1 | 0.883 | ||
| s | 0.881 | ||
| p | 0.878 | ||
| Merit 2 | 0.883 | ||
| s | 0.882 | ||
| p | 0.879 | ||
| No filter | / | 0.829 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Zhan, S.; Kurihara, T. Wide-Angular Tolerance Optical Filter Design and Its Application to Green Pepper Segmentation. Sensors 2023, 23, 2981. https://doi.org/10.3390/s23062981
Yu J, Zhan S, Kurihara T. Wide-Angular Tolerance Optical Filter Design and Its Application to Green Pepper Segmentation. Sensors. 2023; 23(6):2981. https://doi.org/10.3390/s23062981
Chicago/Turabian StyleYu, Jun, Shu Zhan, and Toru Kurihara. 2023. "Wide-Angular Tolerance Optical Filter Design and Its Application to Green Pepper Segmentation" Sensors 23, no. 6: 2981. https://doi.org/10.3390/s23062981
APA StyleYu, J., Zhan, S., & Kurihara, T. (2023). Wide-Angular Tolerance Optical Filter Design and Its Application to Green Pepper Segmentation. Sensors, 23(6), 2981. https://doi.org/10.3390/s23062981