
Directional Torsion Sensor Based on a Two-Core Fiber with a Helical Structure


Abstract
1. Introduction
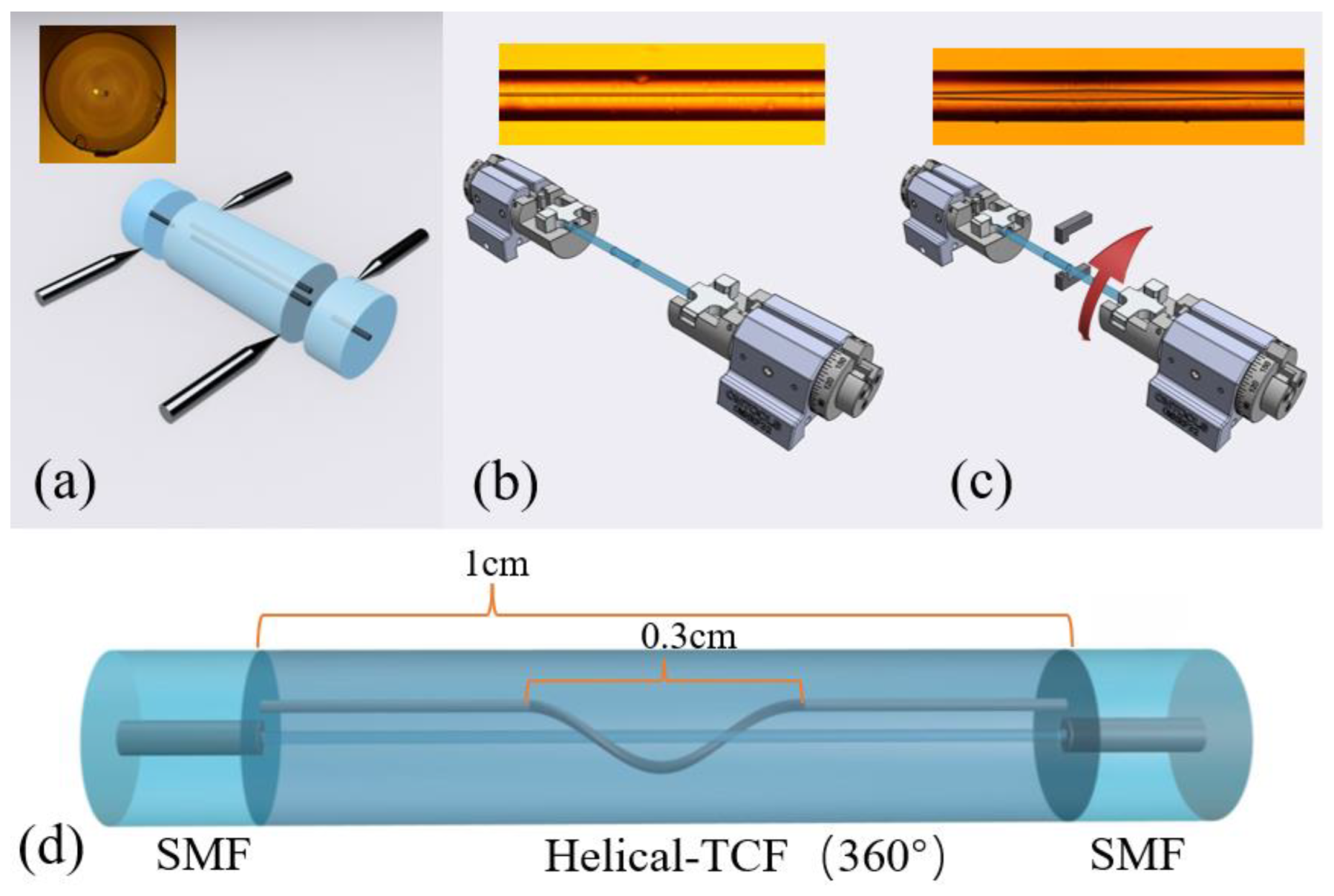
2. Sensor Fabrication
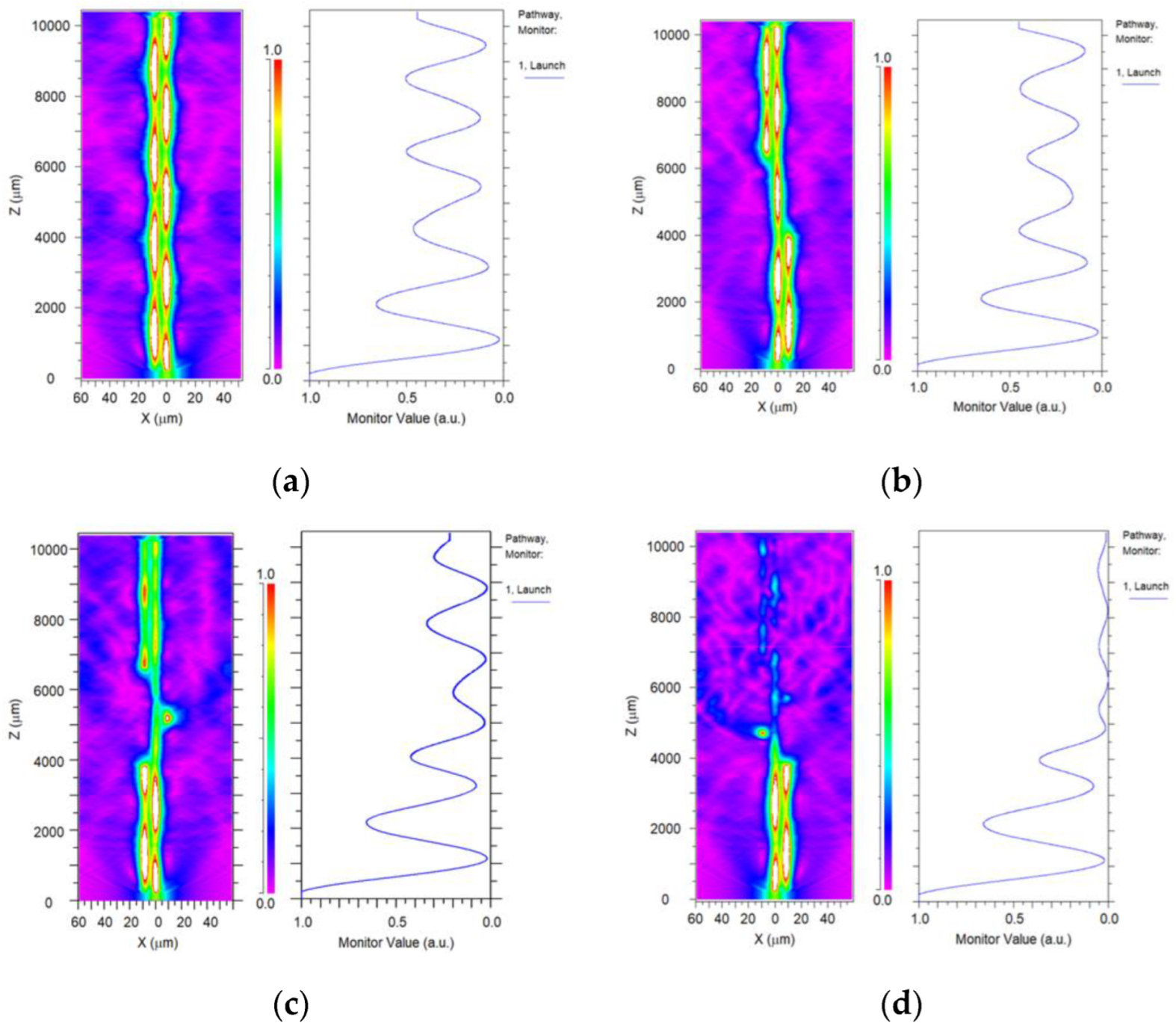
3. Sensing Principle
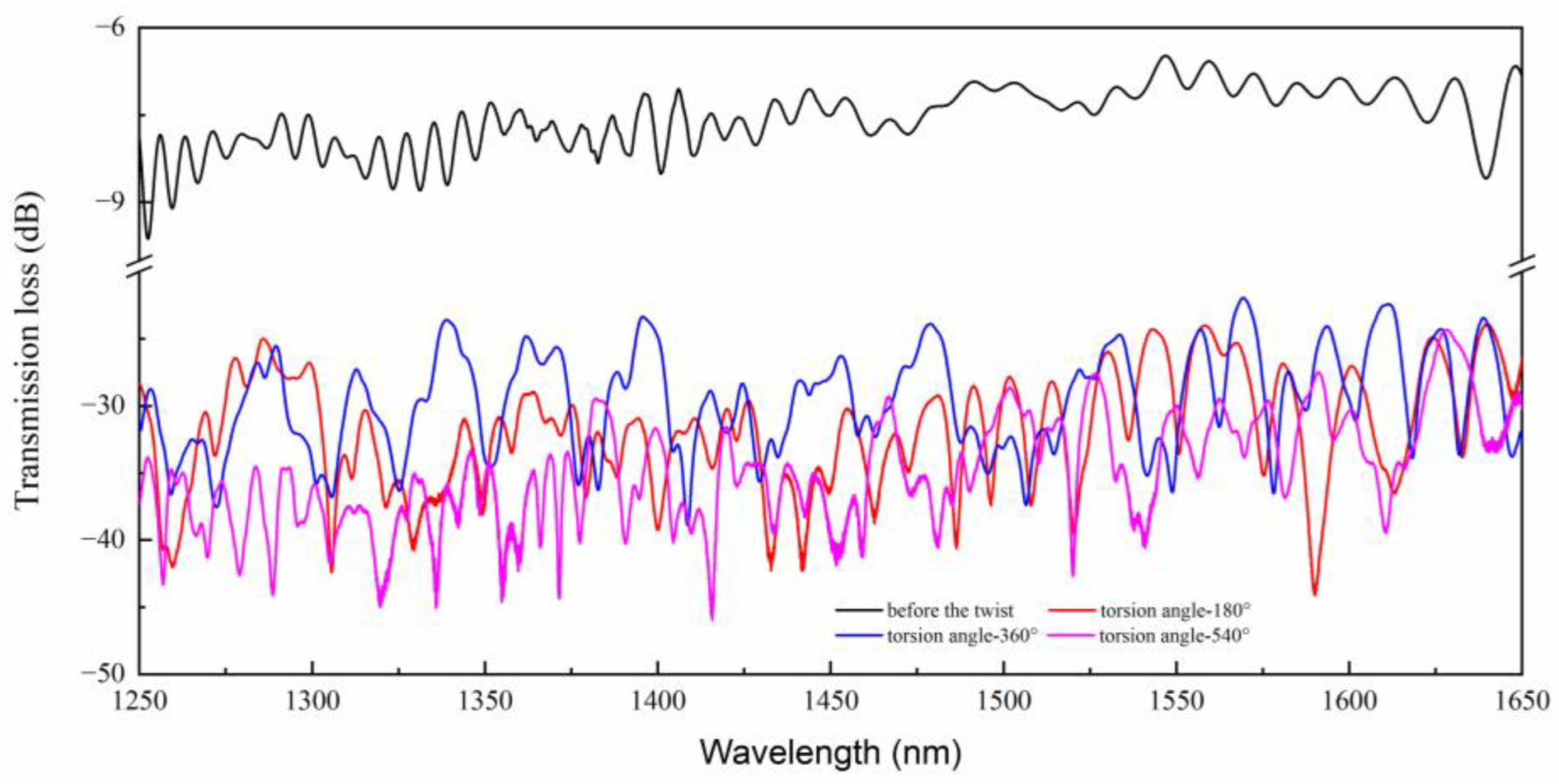
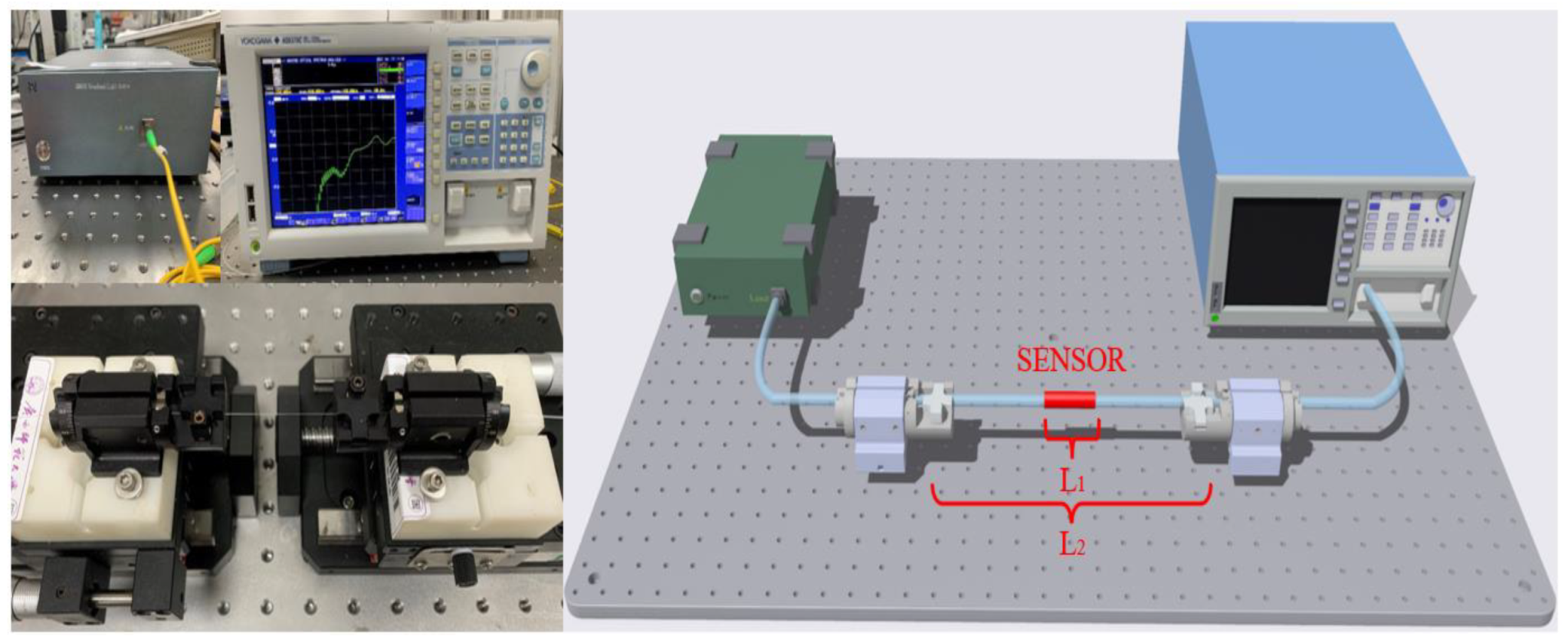
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Klotz, T.; Pothier, R.; Walch, D.; Colombo, T. Prediction of the business jet Global 7500 wing deformed shape using fiber Bragg gratings and neural network. Results Eng. 2021, 9, 100190. [Google Scholar] [CrossRef]
- Kahandawa, G.C.; Epaarachchi, J.; Wang, H.; Lau, K.T. Use of FBG sensors for SHM in aerospace structures. Photonic Sens. 2012, 2, 203–214. [Google Scholar] [CrossRef]
- Jousset, P.; Reinsch, T.; Ryberg, T.; Blanck, H.; Clarke, A.; Aghayev, R.; Hersir, G.P.; Henninges, J.; Weber, M.; Krawczyk, C.M. Dynamic strain determination using fibre-optic cables allows imaging of seismological and structural features. Nat. Commun. 2018, 9, 2509. [Google Scholar]
- Xu, R.; Yurkewich, A.; Patel, R.V. Curvature torsion and force sensing in continuum robots using helically wrapped FBG sensors. IEEE Robot. Automat. Lett. 2016, 1, 1052–1059. [Google Scholar]
- Bai, H.D.; Li, S.; Barreiros, J.; Tu, Y.; Pollock, C.R.; Shepherd, R.F. Stretchable distributed fiber-optic sensors. Science 2020, 370, 848–852. [Google Scholar] [CrossRef]
- Zhang, H.L.; Zhang, W.G.; Chen, L.; Xie, Z.D.; Zhang, Z.; Yan, T.Y.; Wang, B. Bidirectional Torsion Sensor Based on a Pair of Helical Long-Period Fiber Gratings. IEEE Photonics Technol. Lett. 2016, 28, 1700–1702. [Google Scholar] [CrossRef]
- Deng, M.; Xu, J.; Zhang, Z.; Bai, Z.; Liu, S.; Wang, Y.; Zhang, Y.; Liao, C.; Jin, W.; Peng, G.; et al. Long period fiber grating based on periodically screw-type distortions for torsion sensing. Opt. Express 2017, 25, 14308–14316. [Google Scholar] [CrossRef]
- Li, Y.P.; Chen, L.; Zhang, Y.X.; Zhang, W.G.; Wang, S.; Zhang, Y.S.; Yan, T.Y.; Hu, W.; Li, X.Y.; Geng, P.C. Realizing torsion detection using berry phase in an angle-chirped long-period fiber grating. Opt. Express 2017, 25, 13448–13454. [Google Scholar] [CrossRef]
- Sun, C.; Wang, R.; Jin, X.; Wang, Z.; Liu, W.; Zhang, S.; Ma, Y.; Lin, J.; Li, Y.; Geng, T.; et al. A new phase-shifted long-period fiber grating for simultaneous measurement of torsion and temperature. Chin. Opt. Lett. 2020, 18, 021203. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, Y.; Huang, L.; Mou, C. Double cladding fiber chiral long-period grating-based directional torsion sensor. IEEE Photonics Technol. Lett. 2019, 31, 1522–1525. [Google Scholar] [CrossRef]
- Oliveira, R.; Nogueira, R.; Bilro, L. 3D printed long period gratings and their applications as high sensitivity shear-strain and torsion sensors. Opt. Express 2021, 29, 17795–17814. [Google Scholar] [CrossRef] [PubMed]
- Silva, R.M.; Ferreira, M.S.; Frazao, O. Temperature independent torsion sensor using a high-birefringent Sagnac loop interferometer. Opt. Commun. 2012, 285, 1167–1170. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, W.; Chen, L.; Yan, T.; Zhang, L.; Wang, L.; Wang, B. Fiber torsion sensor based on a twist taper in polarization-maintaining fiber. Opt. Express 2015, 23, 23877–23886. [Google Scholar] [CrossRef] [PubMed]
- Shao, L.Y.; Zhang, X.; He, H.; Zhang, Z.; Zou, X.; Luo, B.; Pan, W.; Yan, L. Optical fiber temperature and torsion sensor based on Lyot-Sagnac interferometer. Sensors 2016, 16, 1774. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Fan, P.; Sun, L.-P.; Wu, C.; Guan, B.-O. Few-period helically twisted all-solid photonic bandgap fibers. Opt. Lett. 2018, 43, 655–658. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, S.; Wang, Y.; Huang, Y.; Xu, X.; Fu, C.; Wu, T.; Liao, C. Highly sensitive torsion sensor based on directional coupling in twisted photonic crystal fiber. Appl. Phys. Express 2018, 11, 042501. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, Y.; Bai, Z.; Liu, S.; Fu, C.; Huang, Y.; Liao, C. Helicity Enhanced Torsion Sensor Based on Liquid Filled Twisted Photonic Crystal Fibers. Sensors 2020, 20, 1490. [Google Scholar] [CrossRef]
- Guo, Q.; Zhu, Y.-Q.; Shan, T.-Q.; Pan, X.-P.; Liu, S.-R.; Xue, Z.-K.; Zheng, Z.-M.; Chen, C.; Yu, Y.-S. Intensity-modulated directional torsion sensor based on a helical fiber taper. Opt. Mater. Express 2021, 11, 80–88. [Google Scholar] [CrossRef]
- Jiang, P.; Ouyang, Y.; Guo, H.; Zhou, A. Highly sensitive torsion senor based on dual-side-hole fiber Mach-Zehnder interferometer. Opt. Express 2019, 27, 33880–33888. [Google Scholar] [CrossRef]
- Xu, Y.; Lin, H.; Zhou, A. A pre-twisted taper in dual-side hole fiber for torsion measurement with high sensitivity. IEEE Sens. J. 2020, 20, 7761–7765. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, Z.; Shum, P.; Shao, X.; Wang, R.; Dinh, X.Q.; Fu, S.; Tong, W.; Tang, M. Directional torsion and temperature discrimination based on a multicore fiber with a helical structure. Opt. Express 2018, 26, 544–551. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, Z.; Shum, P.P.; Dinh, X.Q.; Low, W.C.; Xu, Z.; Wang, R.; Shao, X.; Fu, S.; Tong, W.; et al. Highly sensitive strain sensor based on helical structure combined with Mach-Zehnder interferometer in multicore fiber. Sci. Rep. 2017, 7, 46633. [Google Scholar] [CrossRef]
- Budinski, V.; Donlagicm, D. Fiber-optic sensors for measurements of torsion, twist and rotation: A review. Sensors 2017, 17, 443. [Google Scholar] [CrossRef] [PubMed]
- Russell, P.S.; Beravat, R.; Wong, G.K.L. Helically twisted photonic crystal fibres. Phil. Trans. R. Soc. A 2017, 375, 20150440. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Liu, C.H.; Chang, G.; Galvanauskas, A. Angular-momentum coupled optical waves in chirallycoupled-core fibers. Opt. Express 2011, 19, 26515–26528. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Song, Z.; Wei, J.; Hu, J. Fiber in-line Mach-Zehnder interferometer for simultaneous measurement of transverse loading and temperature based on multi-core fiber. Opt. Laser Technol. 2021, 143, 107354. [Google Scholar] [CrossRef]
- Ivanov, O.V.; Wang, L.A. Wavelength shifts of cladding-mode resonance in corrugated long-period fiber gratings under torsion. Appl. Opt. 2003, 42, 2264–2272. [Google Scholar] [CrossRef]
- Yang, K.; Liu, Y.; Wang, Z.; Li, Y.; Han, Y.; Zhang, H. Twist Sensor Based on Long Period Grating and Tilted Bragg Grating Written in Few-Mode Fibers. IEEE Photonics J. 2018, 10, 1–8. [Google Scholar] [CrossRef]
- Fu, H.Y.; Khijwania, S.K.; Tam, H.; Wai, P.K.A.; Lu, C. Polarization-maintaining photonic-crystal-fiber-based all-optical polarimetric torsion sensor. Appl. Opt. 2010, 49, 5954–5958. [Google Scholar] [CrossRef]
- Song, B.; Miao, Y.; Lin, W.; Zhang, H.; Wu, J.; Liu, B. Multi-mode interferometer-based twist sensor with low temperature sensitivity employing square coreless fibers. Opt. Express 2013, 21, 26806–26811. [Google Scholar] [CrossRef]
- Kang, X.; Zhang, W.; Zhang, Y.; Yang, J.; Chen, L.; Kong, L.; Zhang, Y.; Yu, L.; Yan, T.; Geng, P. Intensity-demodulated torsion sensor based on thin-core polarization-maintaining fiber. Appl. Opt. 2018, 57, 3474–3478. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, Y.; Du, B.; Wang, T.; Feng, D.; Jiang, B.; Yang, D. Strain-insensitive twist and temperature sensor based on seven-core fiber. Sens. Actuators A Phys. 2019, 290, 172–176. [Google Scholar] [CrossRef]
- Liu, D.; Wu, Q.; Han, W.; Wei, F.; Ling, F.; Kumar, R.; Mallik, A.K.; Tian, K.; Shen, C.; Farrell, G.; et al. Strain independent twist sensor based on uneven platinum coated hollow core fiber structure. Opt. Express 2019, 27, 19726–19736. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Structure | Sensitivity | Direction Discrimination | Refs. |
|---|---|---|---|
| LPG and TFBG | 1.074 dB/(rad/m) | NO | [7] |
| FM-TFBG and FM-FBG | 0.16 dB/° | YES | [28] |
| PM-PCF | 0.014 dB/° | NO | [29] |
| Square-NCF | 1.28615 nm/(rad/m) | NO | [30] |
| Taper-PMF | 2.392 nm/(rad/m) | YES | [13] |
| PC with PMF | 0.29 dB/° | NO | [31] |
| MMF-SCF-MMF | 0.118 nm/(rad/m) | YES | [21] |
| MMF-SCF-MMF | 0.4 nm/(rad/m) | YES | [32] |
| HCF with Pb | 0.1 dB/° | NO | [33] |
| SMF-HTCF-SMF | 0.242 nm/(rad/m) −0.04 dB/° | YES | Our work |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.; Li, Y.; Hu, J. Directional Torsion Sensor Based on a Two-Core Fiber with a Helical Structure. Sensors 2023, 23, 2874. https://doi.org/10.3390/s23062874
Song Z, Li Y, Hu J. Directional Torsion Sensor Based on a Two-Core Fiber with a Helical Structure. Sensors. 2023; 23(6):2874. https://doi.org/10.3390/s23062874
Chicago/Turabian StyleSong, Zhuo, Yichun Li, and Junhui Hu. 2023. "Directional Torsion Sensor Based on a Two-Core Fiber with a Helical Structure" Sensors 23, no. 6: 2874. https://doi.org/10.3390/s23062874
APA StyleSong, Z., Li, Y., & Hu, J. (2023). Directional Torsion Sensor Based on a Two-Core Fiber with a Helical Structure. Sensors, 23(6), 2874. https://doi.org/10.3390/s23062874