
Fully Integrated Line Array Angular Displacement Sensing Chip


 ,
, 
Abstract
1. Introduction
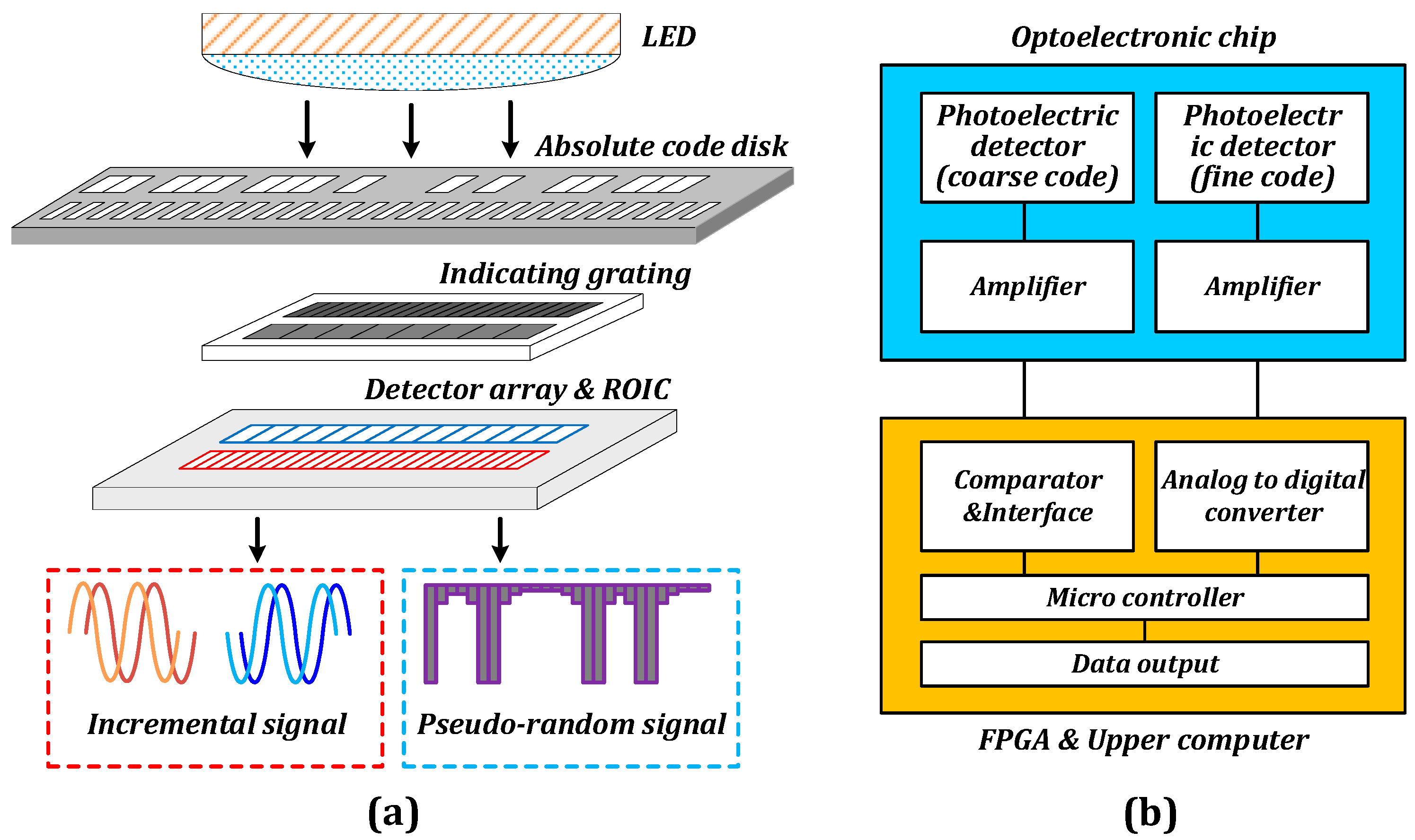
2. Optoelectronic Chip Design
2.1. System Architecture
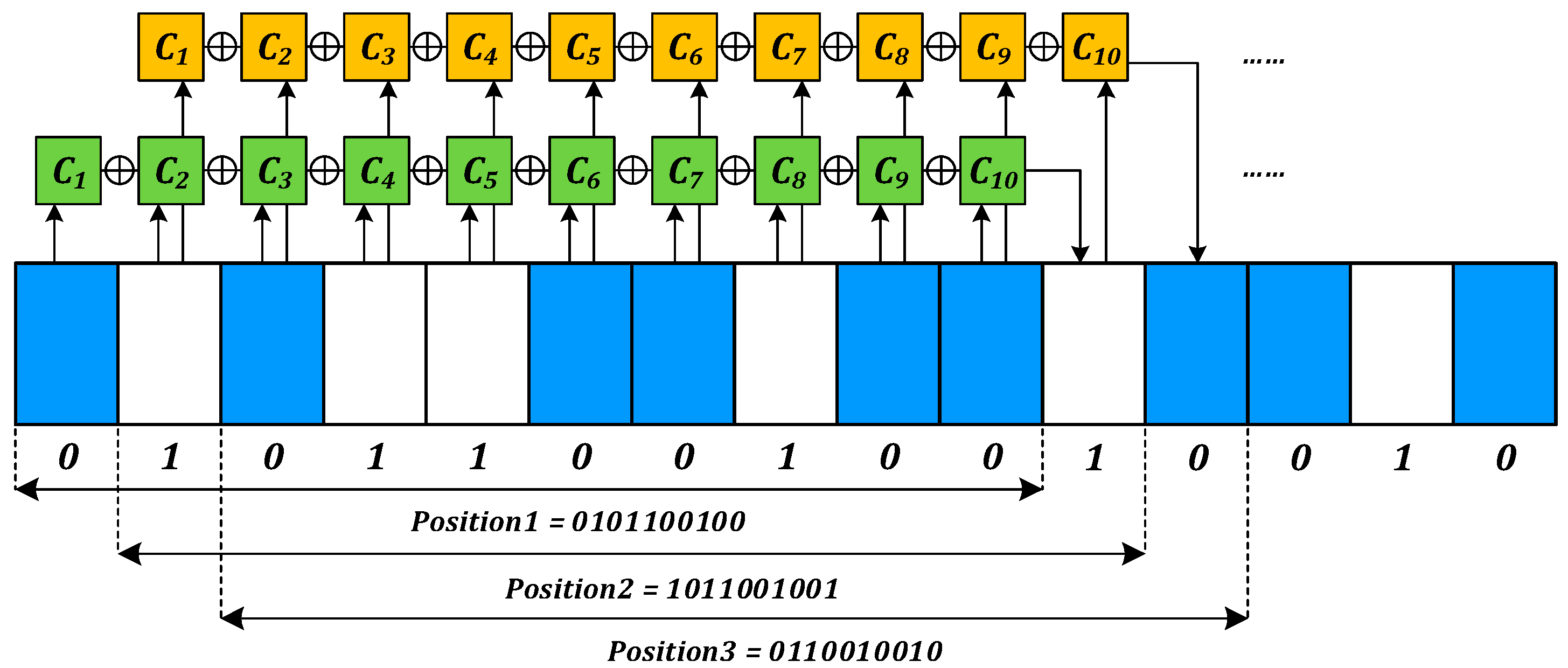
2.2. Mixed Coding Method
2.2.1. Pseudo-Random Coding Principle and M-Sequence Generation
2.2.2. Disc
2.3. Readout Circuit Design
2.3.1. Pseudo-Random Channel
2.3.2. Incremental Channel
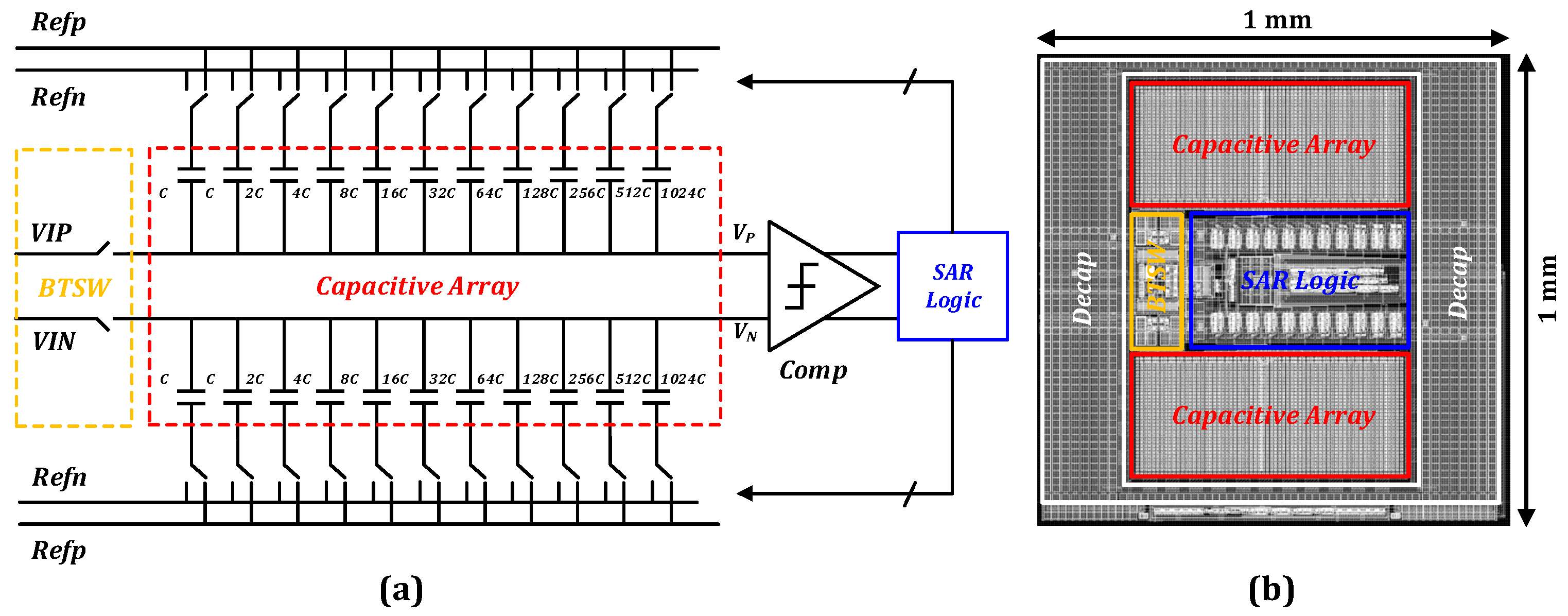
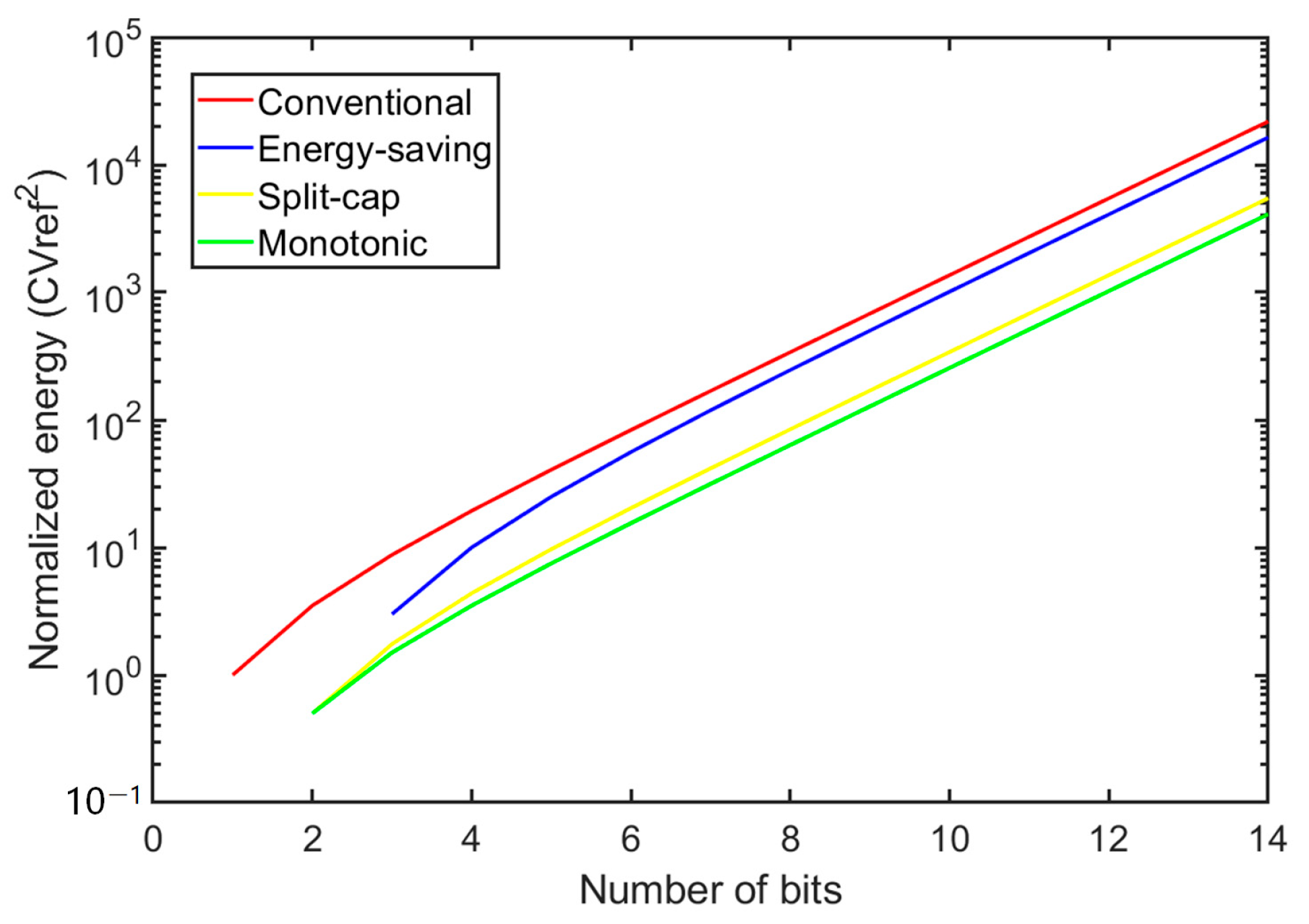
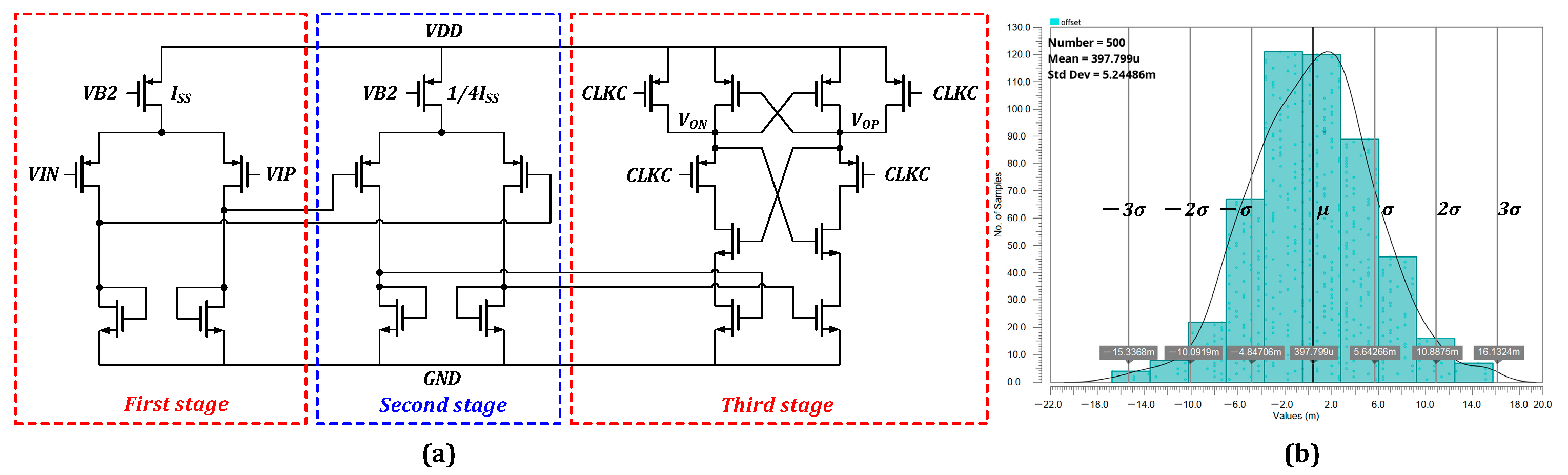
2.4. SAR ADC
3. Chip Implementation and Verification
3.1. Design Parameter
3.2. Pseudo-Random Verification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Petriu, E.M. Absolute-Type Position Transducers Using a Pseudorandom Encoding. IEEE Trans. Instrum. Meas. 1987, IM-36, 950–955. [Google Scholar] [CrossRef]
- López, J.; Artés, M.; Alejandre, I. Analysis under Vibrations of Optical Linear Encoders Based on Different Scanning Methods Using an Improved Experimental Approach. Exp. Tech. 2012, 36, 35–47. [Google Scholar] [CrossRef]
- Lopez, J.; Artes, M.A. New Methodology for Vibration Error Compensation of Optical Encoders. Sensors 2012, 12, 4918–4933. [Google Scholar] [CrossRef] [PubMed]
- Paul, S.; Chang, J.; Fletcher, J.E.; Mukhopadhyay, S. A Novel High-Resolution Optical Encoder with Axially Stacked Coded Disk for Modular Joints: Physical Modeling and Experimental Validation. IEEE Sens. J. 2018, 18, 6001–6008. [Google Scholar] [CrossRef]
- Aschenbrenner, B.; Zagar, B.G. Analysis and Validation of a Planar High-Frequency Contactless Absolute Inductive Position Sensor. IEEE Trans. Instrum. Meas. 2015, 64, 768–775. [Google Scholar] [CrossRef]
- Anandan, N.; George, B. A Wide-Range Capacitive Sensor for Linear and Angular Displacement Measurement. IEEE Trans. Ind. Electron. 2017, 64, 5728–5737. [Google Scholar] [CrossRef]
- Tran, A.T.T.D.; Lee, J.J.; Zhang, K.; Lo, Y.-H. Ultrafine Motion Detection of Micromechanical Structures Using Optical Moire Patterns. IEEE Photon. Technol. Lett. 1996, 8, 1058–1060. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, S.; Su, X.; You, Z. Adjustment Strategy for Inclination Moiré Fringes in Lithography by Spatial Frequency Decomposition. IEEE Photon. Technol. Lett. 2015, 27, 395–398. [Google Scholar] [CrossRef]
- Johnson, N.; Mohan, K.J.; Janson, K.E.; Jose, J. Optimization of incremental optical encoder pulse processing. In Proceedings of the 2013 International Mutli-Conference on Automation, Computing, Communication, Control and Compressed Sensing (iMac4s), Kottayam, India,, 22–23 March 2013; pp. 769–773. [Google Scholar]
- Petriu, E.M. Absolute Position Measurement Using Pseudo-Random Binary Encoding. IEEE Instrum. Meas. Mag. 1998, 1, 19–23. [Google Scholar] [CrossRef]
- Kim, J.-A.; Kim, J.W.; Kang, C.-S.; Jin, J.; Bong Eom, T. An Optical Absolute Position Measurement Method Using a Phase-Encoded Single Track Binary Code. Rev. Sci. Instrum. 2012, 83, 115115. [Google Scholar] [CrossRef] [PubMed]
- Matsuzoe, Y. High-Performance Absolute Rotary Encoder Using Multitrack and M-Code. Opt. Eng. 2003, 42, 124. [Google Scholar] [CrossRef]
- Wang, X.; Liang, Y.; Zhang, W.; Yang, X.; Hao, D. An Optical Encoder Chip with Area Compensation. Electronics 2022, 11, 3997. [Google Scholar] [CrossRef]
- Pu, Z.W.; Zhu, G.; Fu, M.; Li, C.-L.; Yu, X.-Y.; Zhang, S. A New High Precision Linear Displacement Sensor Based on Single Light Field Orthogonal Modulation. IEEE Sens. J. 2020, 20, 5834–5844. [Google Scholar] [CrossRef]
- Wang, X.-J. Errors and precision analysis of subdivision signals for photoelectric angle encoders. Opt. Precis. Eng. 2012, 20, 379–386. [Google Scholar] [CrossRef]
- Sugiyama, Y.; Matsui, Y.; Toyoda, H.; Mukozaka, N.; Ihori, A.; Abe, T.; Takabe, M.; Mizuno, S. A 3.2 KHz, 14-Bit Optical Absolute Rotary Encoder With a CMOS Profile Sensor. IEEE Sens. J. 2008, 8, 1430–1436. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, T.; Yuan, B.; Wang, L. Absolute angular encoder based on optical diffraction. In Proceedings of the SPIE 9623, 2015 International Conference on Optical Instruments and Technology: Optoelectronic Measurement Technology and Systems, Beijing, China, 17–19 May 2015; p. 962304. [Google Scholar] [CrossRef]
- Jiang, J.; Dai, J.; Zhang, H.; Mu, Y.; Chang, Y. Improving the Subdivision Accuracy of Photoelectric Encoder Using Particle Swarm Optimization Algorithm. Opt. Quant. Electron. 2022, 54, 138. [Google Scholar] [CrossRef]
- Yu, H.; Wan, Q.; Lu, X.; Zhao, C.; Liang, L. High Precision Angular Displacement Measurement Based on Self-Correcting Error Compensation of Three Image Sensors. Appl. Opt. 2022, 61, 287. [Google Scholar] [CrossRef] [PubMed]
- Mu, Y.; Jiang, J.; Ding, N.; Ni, Q.; Chang, Y. A 7.4 KHz, 20-Bit Image Encoder with a CMOS Linear Image Sensor. Opt. Quant. Electron. 2019, 51, 321. [Google Scholar] [CrossRef]
- Jiang, J.; Dai, J.; Yang, S.; Chang, Y. A 22-Bit Image Encoder with Optoelectronic Integrated Chip. Opt. Commun. 2022, 512, 128022. [Google Scholar] [CrossRef]
- Yu, H.; Wan, Q.; Lu, X.; Du, Y.; Liang, L. High-Precision Displacement Measurement Algorithm Based on a Depth Fusion of Grating Projection Pattern. Appl. Opt. 2022, 61, 1049. [Google Scholar] [CrossRef] [PubMed]
- Bhargava, C.; Mody, V. Review of flash-SAR ADC with pipeline operations suitable for better performance. Int. J. Control. Theory Appl. 2016, 9, 5139–5148. [Google Scholar]
- Chen, D.; Cui, X.; Zhang, Q.; Li, D.; Cheng, W.; Fei, C.; Yang, Y. A Survey on Analog-to-Digital Converter Integrated Circuits for Miniaturized High Resolution Ultrasonic Imaging System. Micromachines 2022, 13, 114. [Google Scholar] [CrossRef] [PubMed]
- Dalmia, H.; Sinha, S.K. Analog to Digital Converters (ADC): A Literature Review. E3S Web Conf. 2020, 184, 01025. [Google Scholar] [CrossRef]
- Liu, C.-C.; Chang, S.-J.; Huang, G.-Y.; Lin, Y.-Z. A 10-bit 50-MS/s SAR ADC With a Monotonic Capacitor Switching Procedure. IEEE J. Solid-State Circuits 2010, 45, 731–740. [Google Scholar] [CrossRef]
- Suarez, R.; Gray, P.; Hodges, D. An All-MOS Charge-Redistribution A/D Conversion Technique. In Proceedings of the 1974 IEEE International Solid-State Circuits Conference, Digest of Technical Papers, Philadelphia, PA, USA, 13–15 February 1974; pp. 194–195. [Google Scholar] [CrossRef]
- Chang, Y.-K.; Wang, C.-S.; Wang, C.-K. A 8-Bit 500-KS/s Low Power SAR ADC for Bio-Medical Applications. In Proceedings of the 2007 IEEE Asian Solid-State Circuits Conference, Jeju, Republic of Korea, 12–14 November 2007; pp. 228–231. [Google Scholar] [CrossRef]
- Liu, C.-C.; Chang, S.-J.; Huang, G.-Y.; Lin, Y.-Z. A 0.92 mW 10-bit 50-MS/s SAR ADC in 0.13 µm CMOS process. In Proceedings of the 2009 Symposium on VLSI Circuits, Kyoto, Japan, 15–17 June 2009; pp. 236–237. [Google Scholar]
- Lili, Q.; Qiuhua, W. Angle-Measurement Technology of an Optical Pattern Rotary Encoder and Its Hardware Implementation. Acta Opt. Sin. 2013, 33, 0412001. (In Chinese) [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Precision | Speed | Power Consumption | Area |
|---|---|---|---|---|
| SAR | Higher | Medium | Low | Small |
| Flash | Low | Ultra-fast | Ultra-high | Ultra-large |
| Pipeline | Medium | Fast | Medium | Large |
| Sigma-Delta | Ultra-high | Slow | Higher | Larger |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Technology | 0.35-μm CMOS | Size | 3.5 × 1.8 mm2 |
| Pitch | 25 μm | Number of detectors | 120 × 2 |
| Supply | 3.3 V | Power consumption | 29 mW |
| Frame | 7400 frame/s | Consistency of output | >90% |
| Literature [16] | Literature [13] | Literature [30] | This Paper | |
|---|---|---|---|---|
| Array | Area | Area | Area | Linear |
| Technology | 0.6 μm CMOS | 0.35 μm CMOS | / | 0.35 μm CMOS |
| ADC on-chip | 8-bit SAR | None | None | 12-bit SAR |
| Chip-Size | 4 mm × 4 mm | 5.5 mm × 3.0 mm | 4 mm × 3 mm | 3.8 mm × 1.5 mm |
| Power Consumption | 75 mW | / | / | 29 mW |
| Resolution | 14-bit | 11-bit | 12-bit | 22-bit |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Jiang, J.; Zhao, Z.; Zhao, Z.; Chen, K.; Tao, M.; Chang, Y.; Lo, G.; Song, J. Fully Integrated Line Array Angular Displacement Sensing Chip. Sensors 2023, 23, 2431. https://doi.org/10.3390/s23052431
Fu Y, Jiang J, Zhao Z, Zhao Z, Chen K, Tao M, Chang Y, Lo G, Song J. Fully Integrated Line Array Angular Displacement Sensing Chip. Sensors. 2023; 23(5):2431. https://doi.org/10.3390/s23052431
Chicago/Turabian StyleFu, Yunhao, Jiaqi Jiang, Zhuang Zhao, Zhongyuan Zhao, Kaixin Chen, Min Tao, Yuchun Chang, Guoqiang Lo, and Junfeng Song. 2023. "Fully Integrated Line Array Angular Displacement Sensing Chip" Sensors 23, no. 5: 2431. https://doi.org/10.3390/s23052431
APA StyleFu, Y., Jiang, J., Zhao, Z., Zhao, Z., Chen, K., Tao, M., Chang, Y., Lo, G., & Song, J. (2023). Fully Integrated Line Array Angular Displacement Sensing Chip. Sensors, 23(5), 2431. https://doi.org/10.3390/s23052431