
A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints


Abstract
:1. Introduction
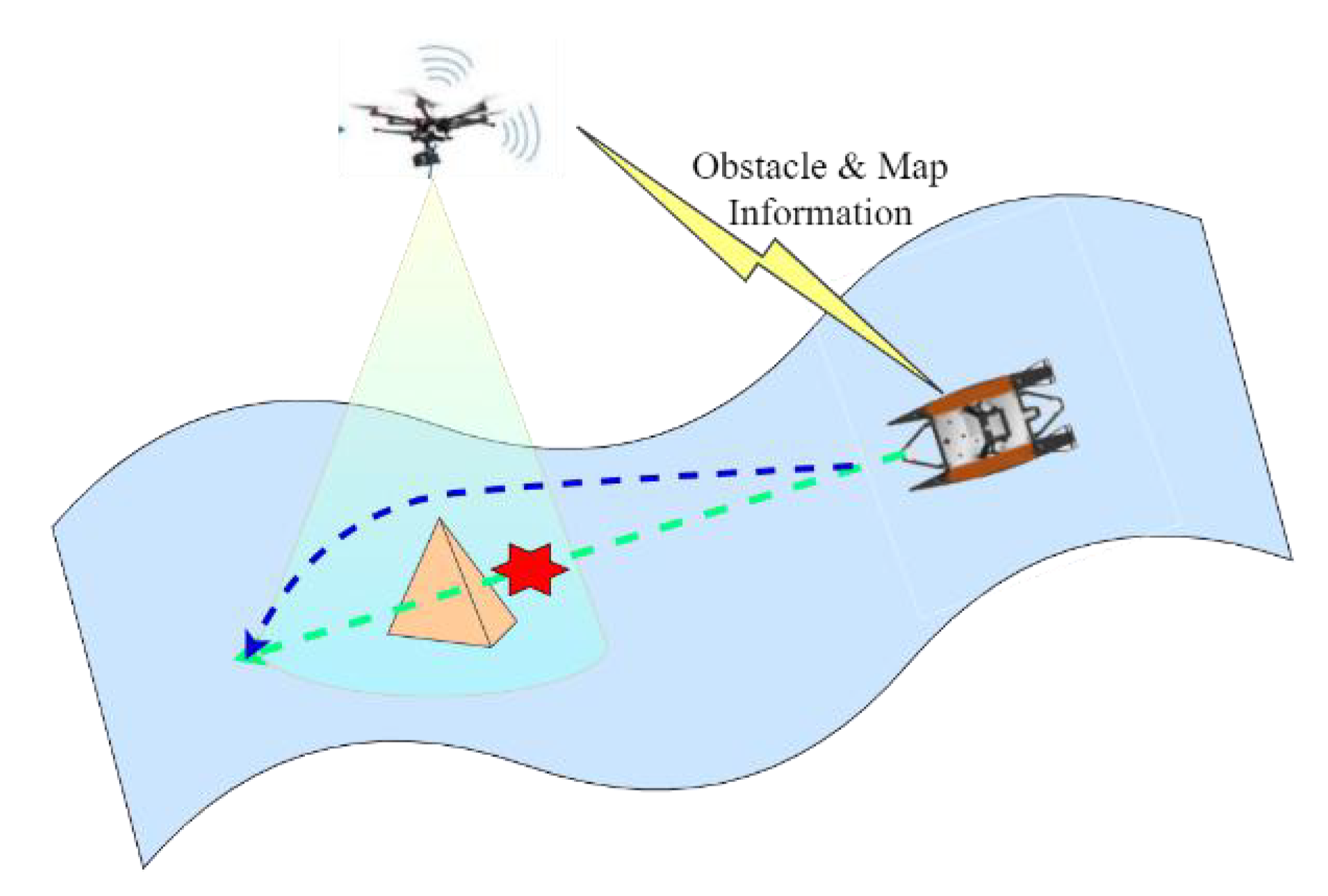
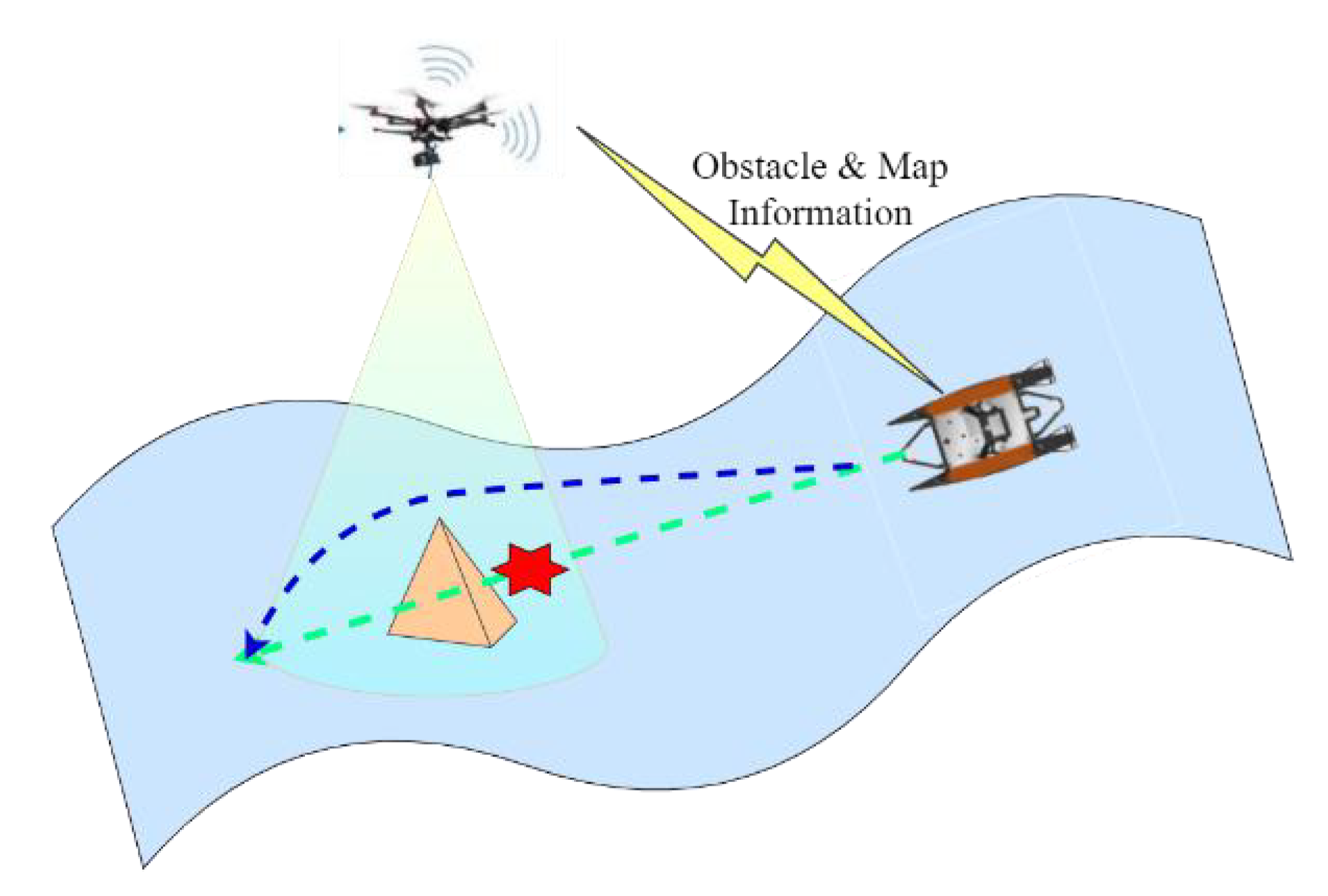
- A novel USV-UAV cooperative system is proposed, where the UAV acts as a flying sensor to provide global map information around the USV by semantic segmentation and 3D projection, providing more comprehensive and effective perception results for navigation planning.
- A numerical optimization problem is formulated during the trajectory generation process. It considers the hull under-actuated dynamic constraints and perception of the UAV, which can generate a fuel-saving trajectory in real-time optimization.
- The lowest energy consumption control law is proposed to track the generated trajectory efficiently and accurately, and extensive experiments are conducted to verify the effectiveness of the USV-UAV cooperative system.
2. Related Works
2.1. Trajectory Planning for USV
2.2. The USV-UAV Cooperative System
3. Cooperative Trajectory Generation
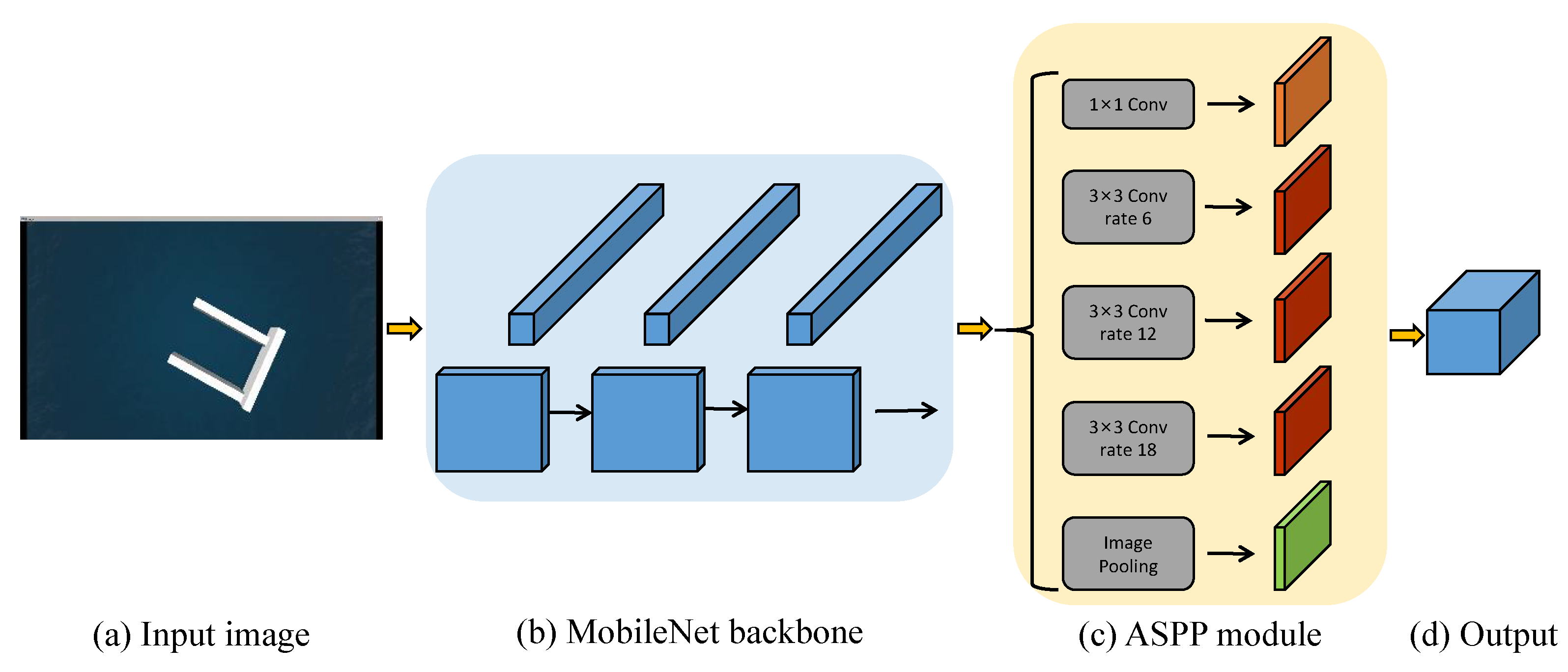
3.1. Environmental Perception and 3D Projection
3.2. Initial Trajectory Generation
| Algorithm 1 Trajectory Search with Hybrid A* |
Input:, , Output: Trajectory T
|
4. Trajectory Optimization and Tracking
4.1. Trajectory Optimization with Dynamics
| Algorithm 2 Global Trajectory Optimization |
Input:, , Output:X
|
4.2. Tracking Control with NMPC
5. Experimental Analysis
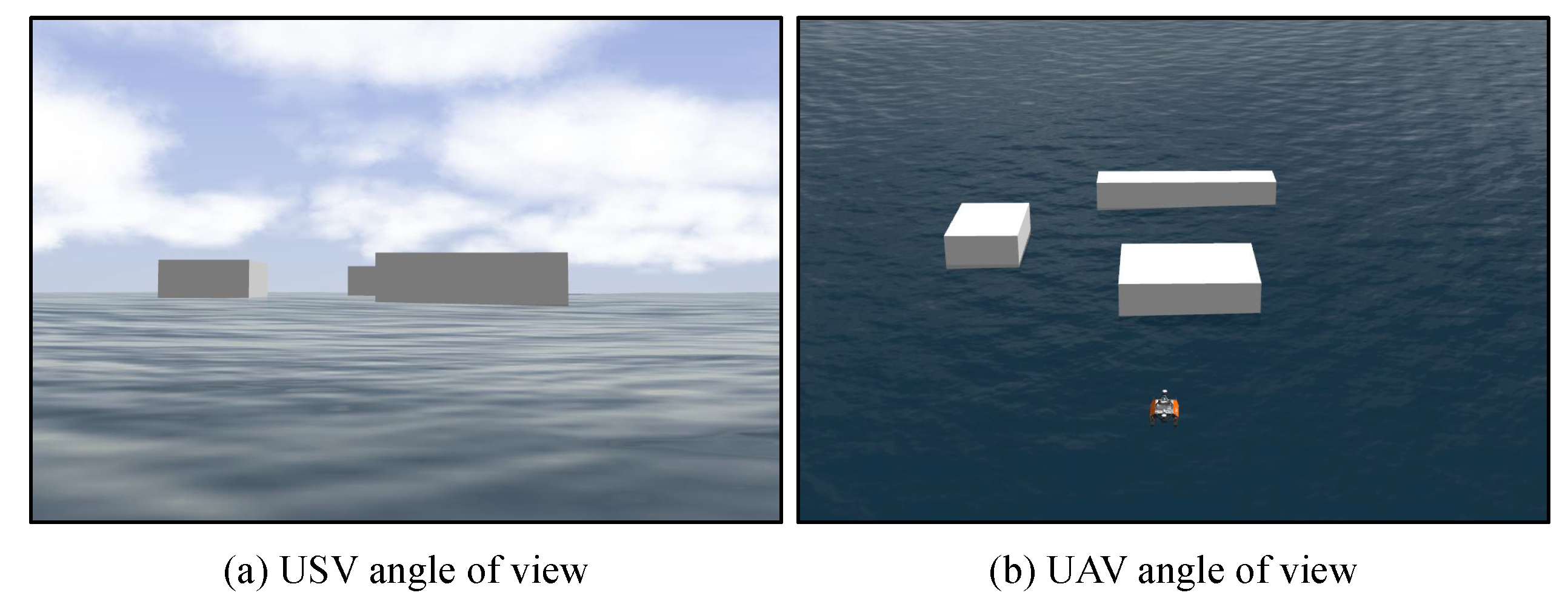
5.1. Obstacle Recognition Ability
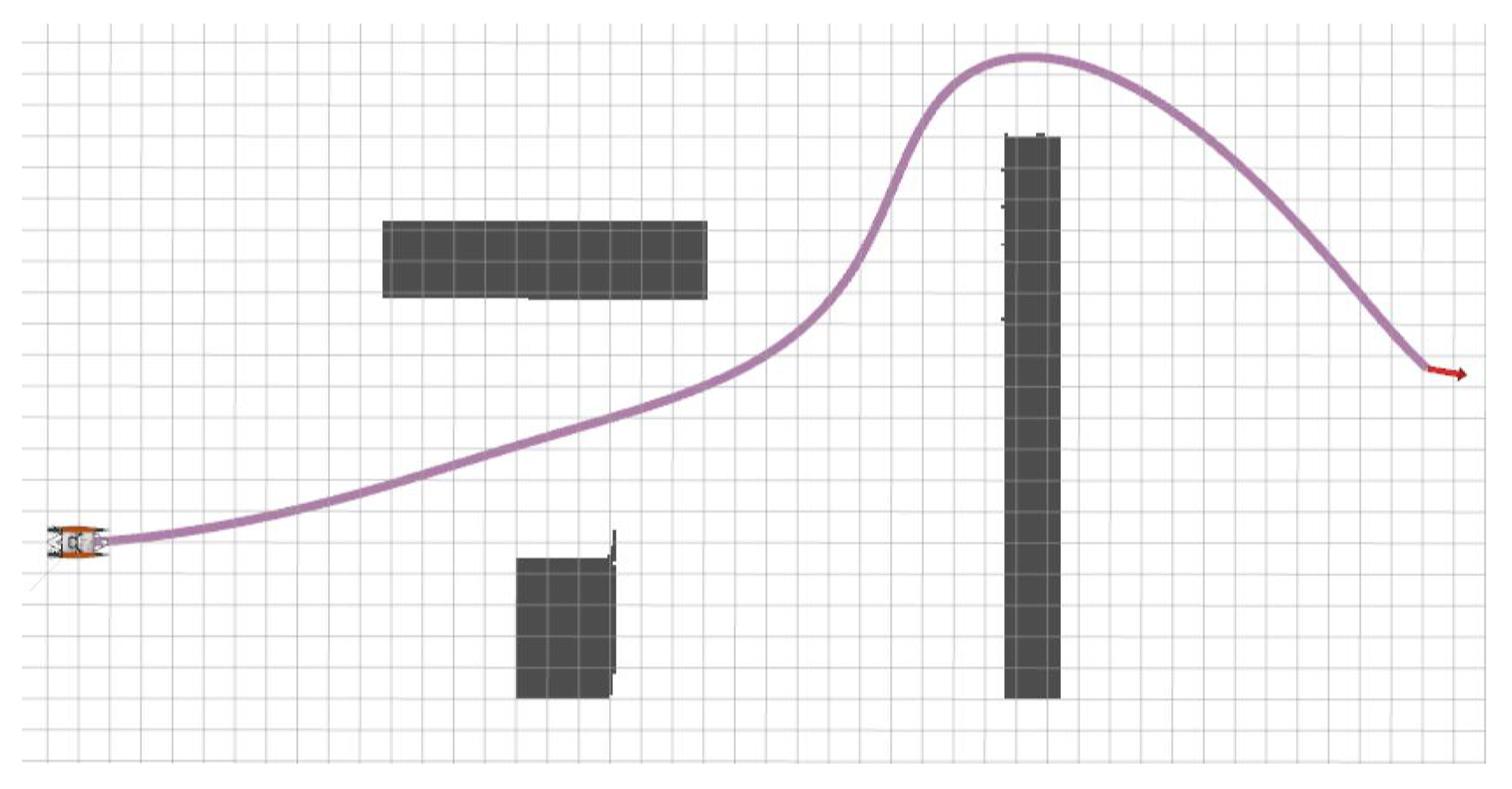
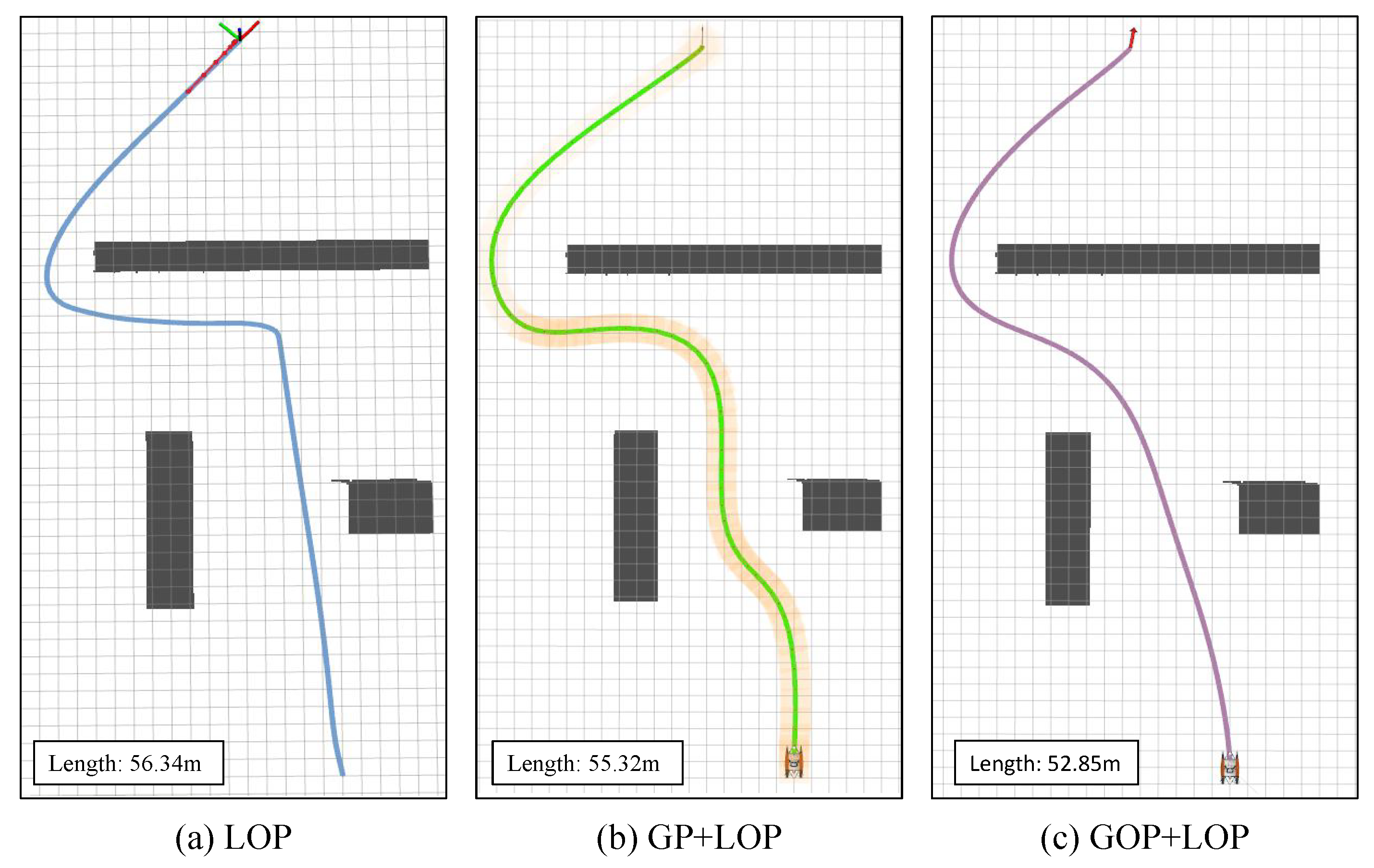
5.2. Trajectory Generation Performance
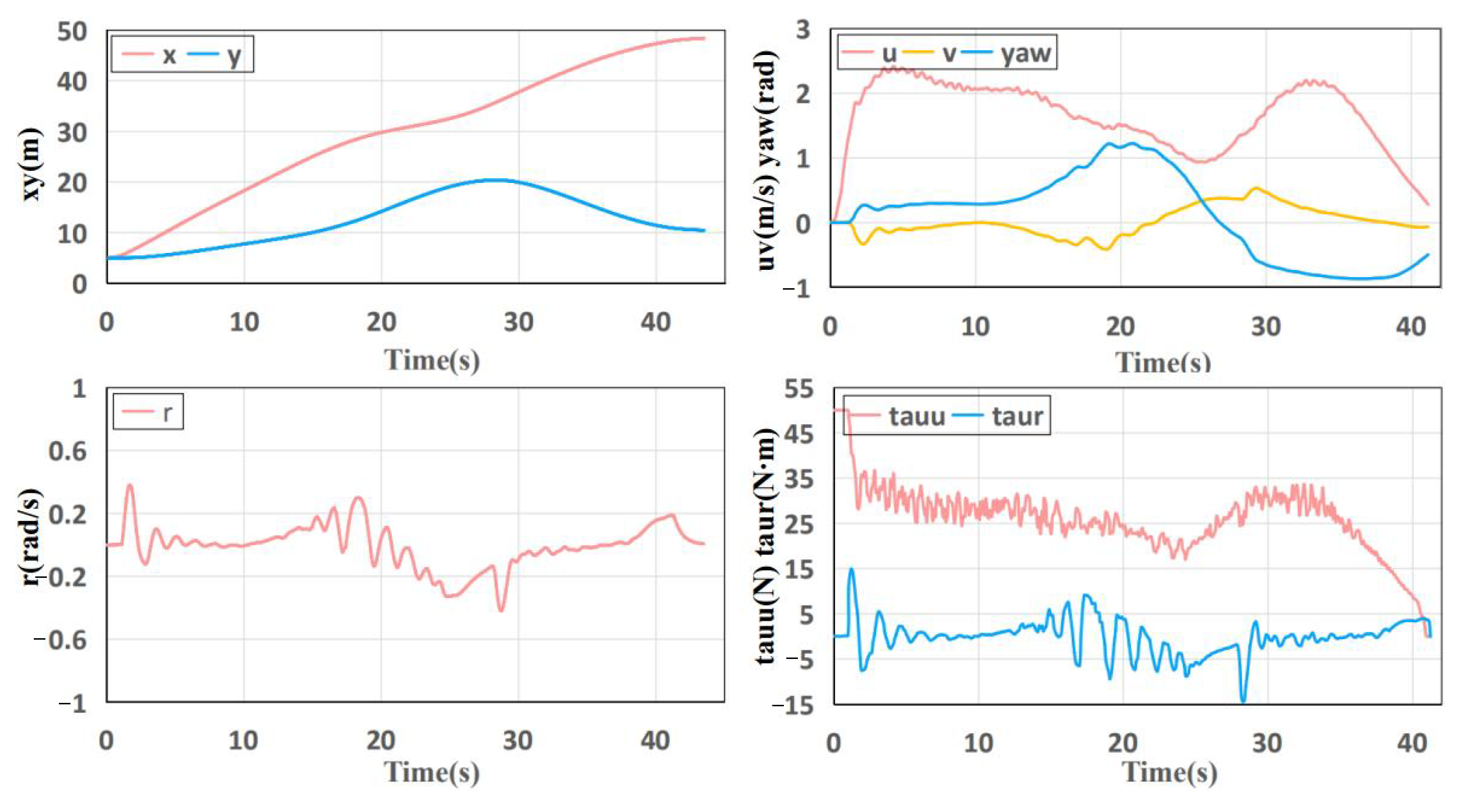
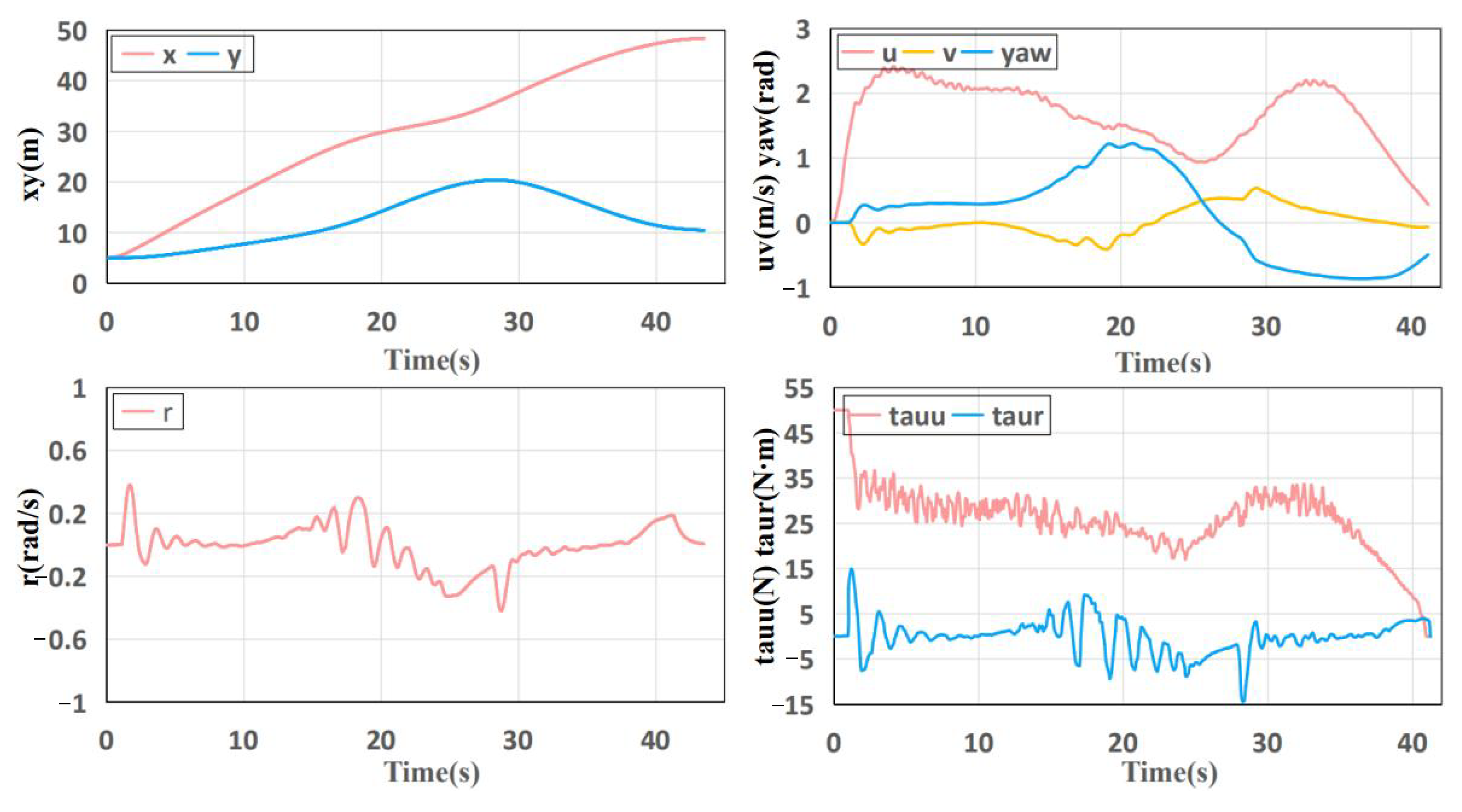
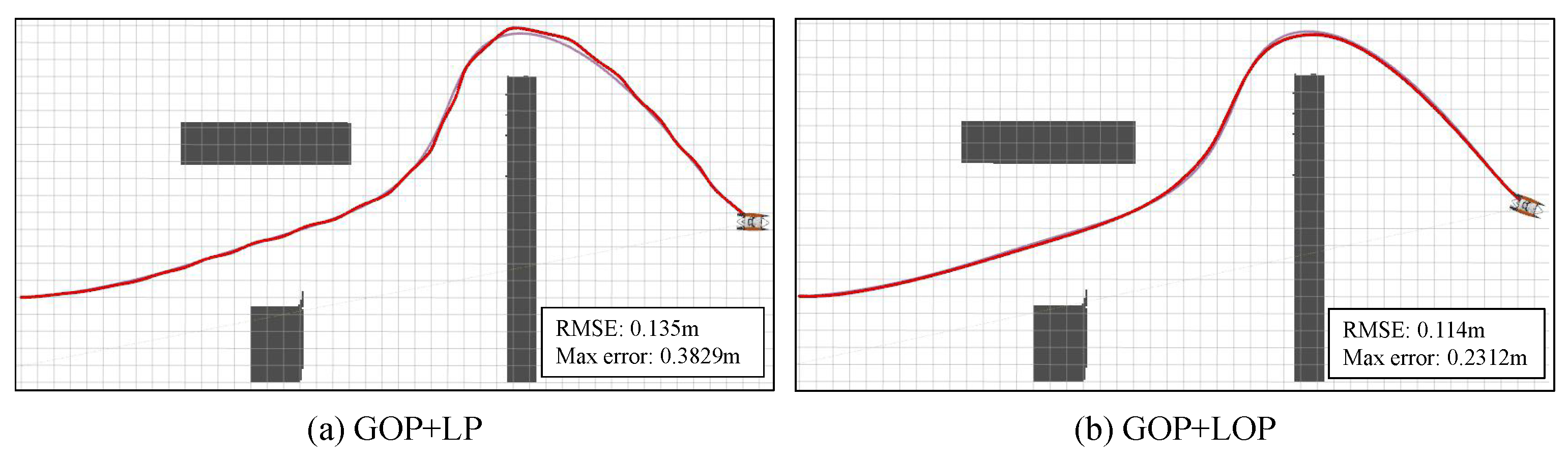
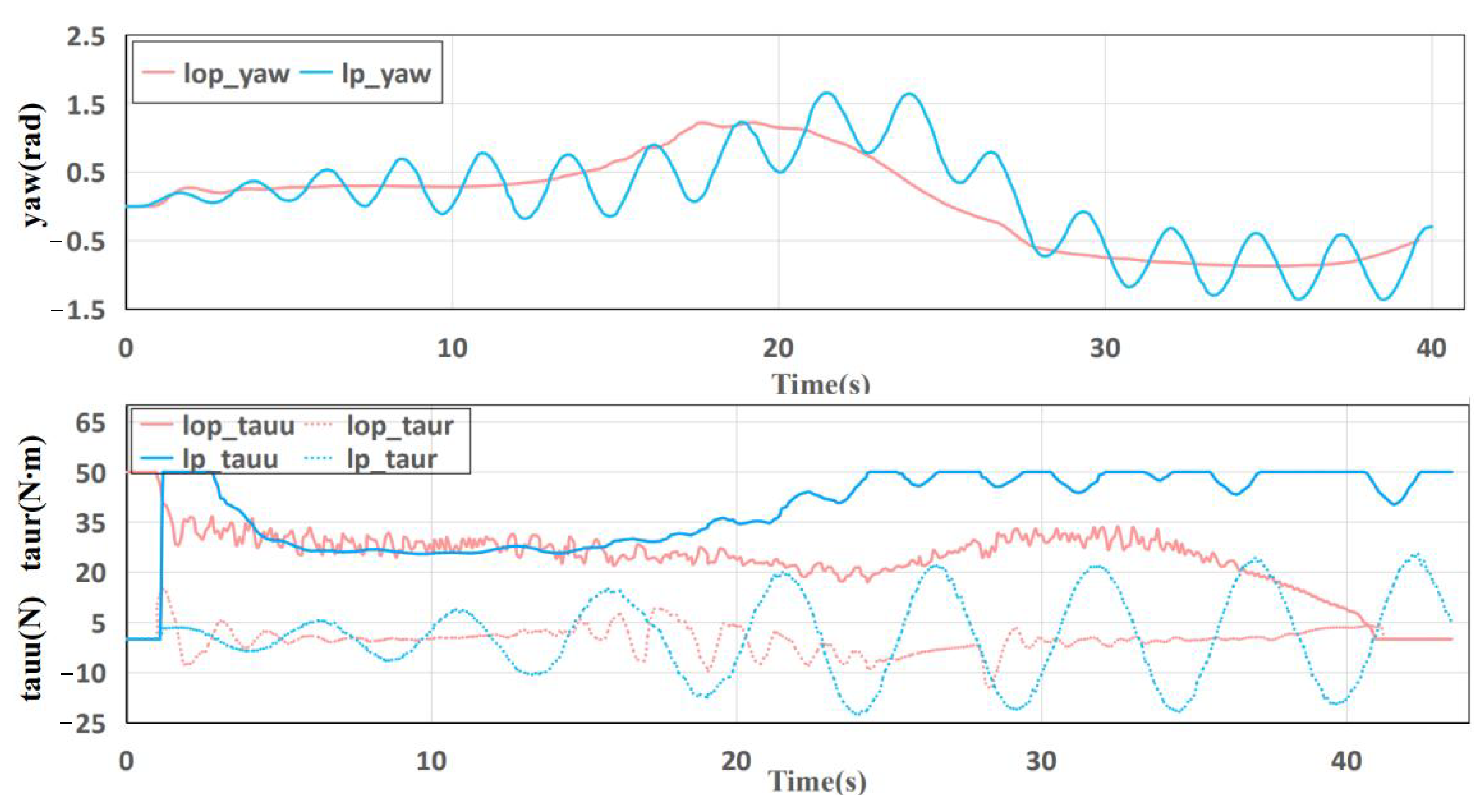
5.3. Tracking Control Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, W.; Shan, T.; Leoni, P.; Fernández-Gutiérrez, D.; Meyers, D.; Ratti, C.; Rus, D. Roboat ii: A novel autonomous surface vessel for urban environments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1740–1747. [Google Scholar]
- Chen, Z.; Huang, T.; Xue, Z.; Zhu, Z.; Xu, J.; Liu, Y. A Novel Unmanned Surface Vehicle with 2D-3D Fused Perception and Obstacle Avoidance Module. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 1804–1809. [Google Scholar]
- Han, J.; Cho, Y.; Kim, J. Coastal SLAM with marine radar for USV operation in GPS-restricted situations. IEEE J. Ocean. Eng. 2019, 44, 300–309. [Google Scholar] [CrossRef]
- Cheng, L.; Deng, B.; Yang, Y.; Lyu, J.; Zhao, J.; Zhou, K.; Yang, C.; Wang, L.; Yang, S.; He, Y. Water Target Recognition Method and Application for Unmanned Surface Vessels. IEEE Access 2021, 10, 421–434. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.; Miao, R.; Li, Y. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field. J. Mar. Sci. Eng. 2021, 9, 161. [Google Scholar] [CrossRef]
- Liu, H.; Weng, P.; Tian, X.; Mai, Q. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems. Ocean Eng. 2023, 267, 113240. [Google Scholar] [CrossRef]
- Page, B.R.; DaRosa, J.; Lindler, J. USV Fleet Planning Considering Logistical Constraints Using Genetic Algorithm. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; pp. 1–7. [Google Scholar]
- Zou, X.; Xiao, C.; Zhan, W.; Zhou, C.; Xiu, S.; Yuan, H. A novel water-shore-line detection method for USV autonomous navigation. Sensors 2020, 20, 1682. [Google Scholar] [CrossRef] [PubMed]
- Naus, K.; Marchel, Ł. Use of a weighted ICP algorithm to precisely determine USV movement parameters. Appl. Sci. 2019, 9, 3530. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Yao, L.; Kanoulas, D.; Ji, Z.; Liu, Y. ShorelineNet: An efficient deep learning approach for shoreline semantic segmentation for unmanned surface vehicles. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5403–5409. [Google Scholar]
- Niu, H.; Savvaris, A.; Tsourdos, A.; Ji, Z. Voronoi-visibility roadmap-based path planning algorithm for unmanned surface vehicles. J. Navig. 2019, 72, 850–874. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Rana, K.; Zaveri, M. A-star algorithm for energy efficient routing in wireless sensor network. In Trends in Network and Communications; Springer: Berlin/Heidelberg, Germany, 2011; pp. 232–241. [Google Scholar]
- Wang, H.; Yu, Y.; Yuan, Q. Application of Dijkstra algorithm in robot path-planning. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Hohhot, China, 15–17 July 2011; pp. 1067–1069. [Google Scholar]
- Zheng, T.; Xu, Y.; Zheng, D. AGV path planning based on improved A-star algorithm. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1534–1538. [Google Scholar]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Guo, W.; Tang, G.; Zhao, F.; Wang, Q. Global Dynamic Path Planning Algorithm for USV Based on Improved Bidirectional RRT. In Proceedings of the 32nd International Ocean and Polar Engineering Conference, Shanghai, China, 6–10 June 2022. [Google Scholar]
- Zhang, X.; Wang, C.; Chui, K.T.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Zhang, Y.; Li, S.; Weng, J. Learning and near-optimal control of underactuated surface vessels with periodic disturbances. IEEE Trans. Cybern. 2021, 52, 7453–7463. [Google Scholar] [CrossRef] [PubMed]
- Wen, N.; Zhang, R.; Wu, J.; Liu, G. Online planning for relative optimal and safe paths for USVs using a dual sampling domain reduction-based RRT* method. Int. J. Mach. Learn. Cybern. 2020, 11, 2665–2687. [Google Scholar] [CrossRef]
- Sedighi, S.; Nguyen, D.V.; Kuhnert, K.D. Guided hybrid A-star path planning algorithm for valet parking applications. In Proceedings of the 2019 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 570–575. [Google Scholar]
- Ozkan, M.F.; Carrillo, L.R.G.; King, S.A. Rescue boat path planning in flooded urban environments. In Proceedings of the 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, TX, USA, 19–21 September 2019. [Google Scholar]
- Xue, K.; Wu, T. Distributed consensus of USVs under heterogeneous uav-usv multi-agent systems cooperative control scheme. J. Mar. Sci. Eng. 2021, 9, 1314. [Google Scholar] [CrossRef]
- Wu, Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission. Ocean Eng. 2019, 182, 162–173. [Google Scholar] [CrossRef]
- Liu, J.; Su, Z.; Xu, Q. UAV-USV Cooperative Task Allocation for Smart Ocean Networks. In Proceedings of the 2021 IEEE 23rd Int Conf on High Performance Computing & Communications; 7th Int Conf on Data Science & Systems; 19th Int Conf on Smart City; 7th Int Conf on Dependability in Sensor, Cloud & Big Data Systems & Application (HPCC/DSS/SmartCity/DependSys), Haikou, China, 20–22 December 2021; pp. 1815–1820. [Google Scholar]
- Li, J.; Zhang, G.; Li, B. Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle. J. Mar. Sci. Eng. 2022, 10, 51. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 640–651. [Google Scholar]
- Xue, Z.; Mao, W.; Jiang, W. Ehanet: Efficient hybrid attention network towards real-time semantic segmentation. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 787–791. [Google Scholar]
- Qin, Z.; Zhang, Z.; Chen, X.; Wang, C.; Peng, Y. Fd-mobilenet: Improved mobilenet with a fast downsampling strategy. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 1363–1367. [Google Scholar]
- Magni, L.; Raimondo, D.M.; Allgöwer, F. Nonlinear Model Predictive Control; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2009; Volume 384. [Google Scholar]
- Lenes, J.H. Autonomous Online Path Planning and Path-Following Control for Complete Coverage Maneuvering of a USV. Master’s Thesis, NTNU, Trondheim, Norway, 2019. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Length | RMSE | Max Error | Speed | Time |
|---|---|---|---|---|---|
| (m) | (m) | (m) | (m/s) | (s) | |
| LOP | 56.34 | 0.120 | 0.3045 | 1.513 | 0.0667 |
| GP+LOP | 55.32 | 0.118 | 0.3047 | 1.608 | 0.0697 |
| GOP+LOP | 52.85 | 0.113 | 0.2312 | 1.675 | 0.0506 |
| Method | RMSE | Max Error | Speed |
|---|---|---|---|
| (m) | (m) | (m/s) | |
| GOP+LP | 0.135 | 0.3829 | 1.327 |
| GOP+LOP | 0.113 | 0.2312 | 1.675 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, T.; Chen, Z.; Gao, W.; Xue, Z.; Liu, Y. A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints. Sensors 2023, 23, 1845. https://doi.org/10.3390/s23041845
Huang T, Chen Z, Gao W, Xue Z, Liu Y. A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints. Sensors. 2023; 23(4):1845. https://doi.org/10.3390/s23041845
Chicago/Turabian StyleHuang, Tao, Zhe Chen, Wang Gao, Zhenfeng Xue, and Yong Liu. 2023. "A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints" Sensors 23, no. 4: 1845. https://doi.org/10.3390/s23041845
APA StyleHuang, T., Chen, Z., Gao, W., Xue, Z., & Liu, Y. (2023). A USV-UAV Cooperative Trajectory Planning Algorithm with Hull Dynamic Constraints. Sensors, 23(4), 1845. https://doi.org/10.3390/s23041845