
High-Resolution Magnetoelectric Sensor and Low-Frequency Measurement Using Frequency Up-Conversion Technique

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
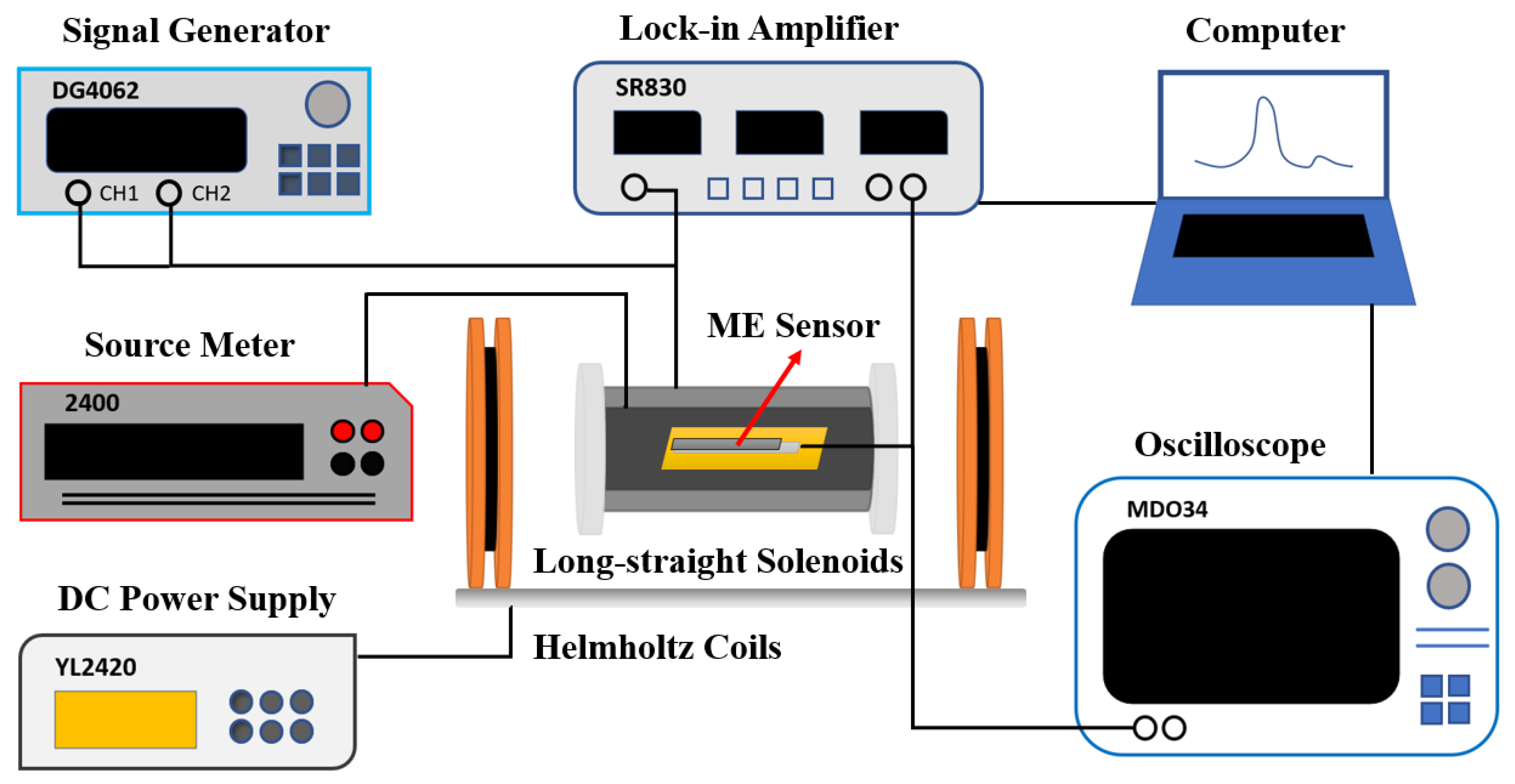
2. Experimental Methods
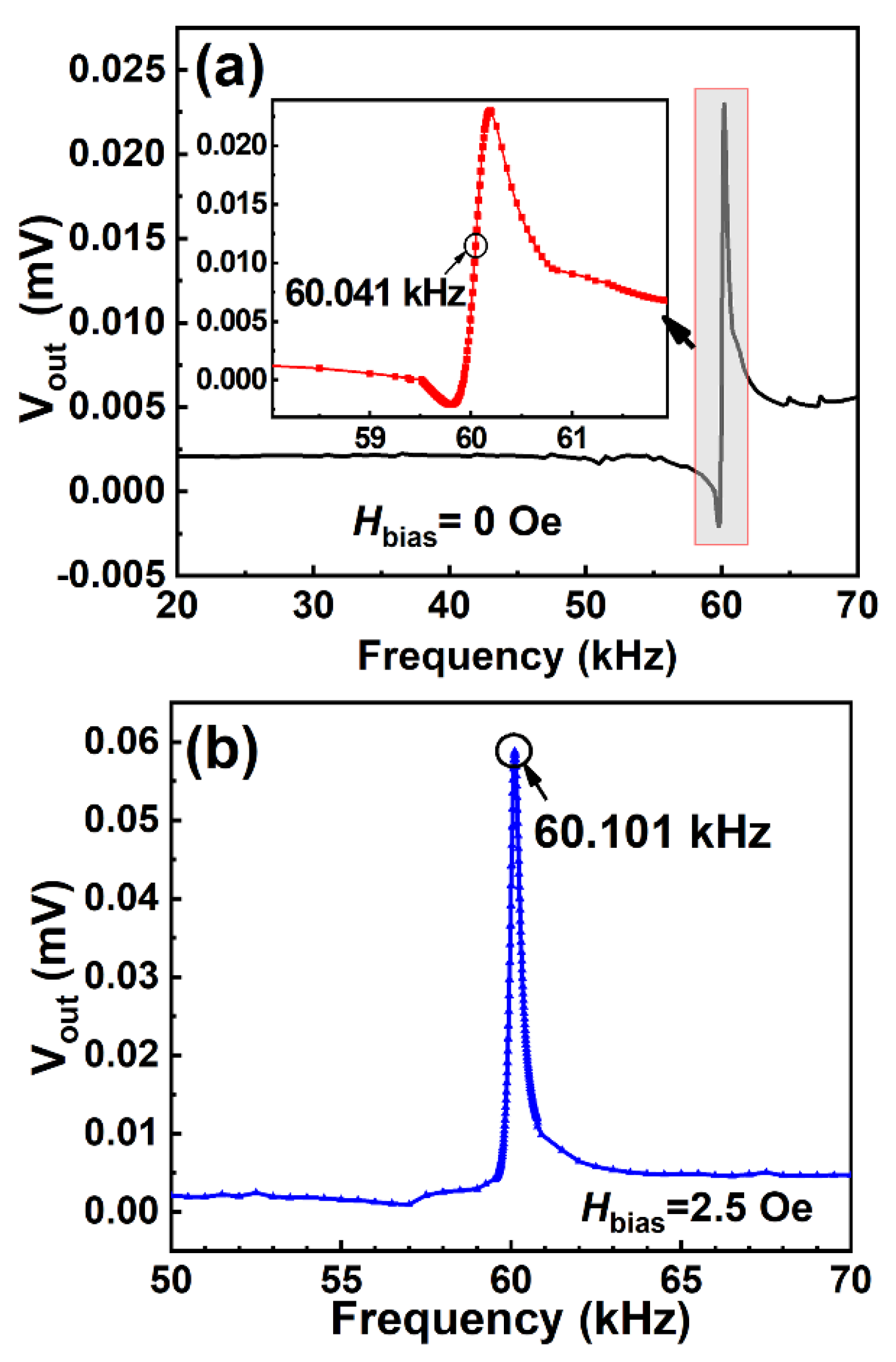
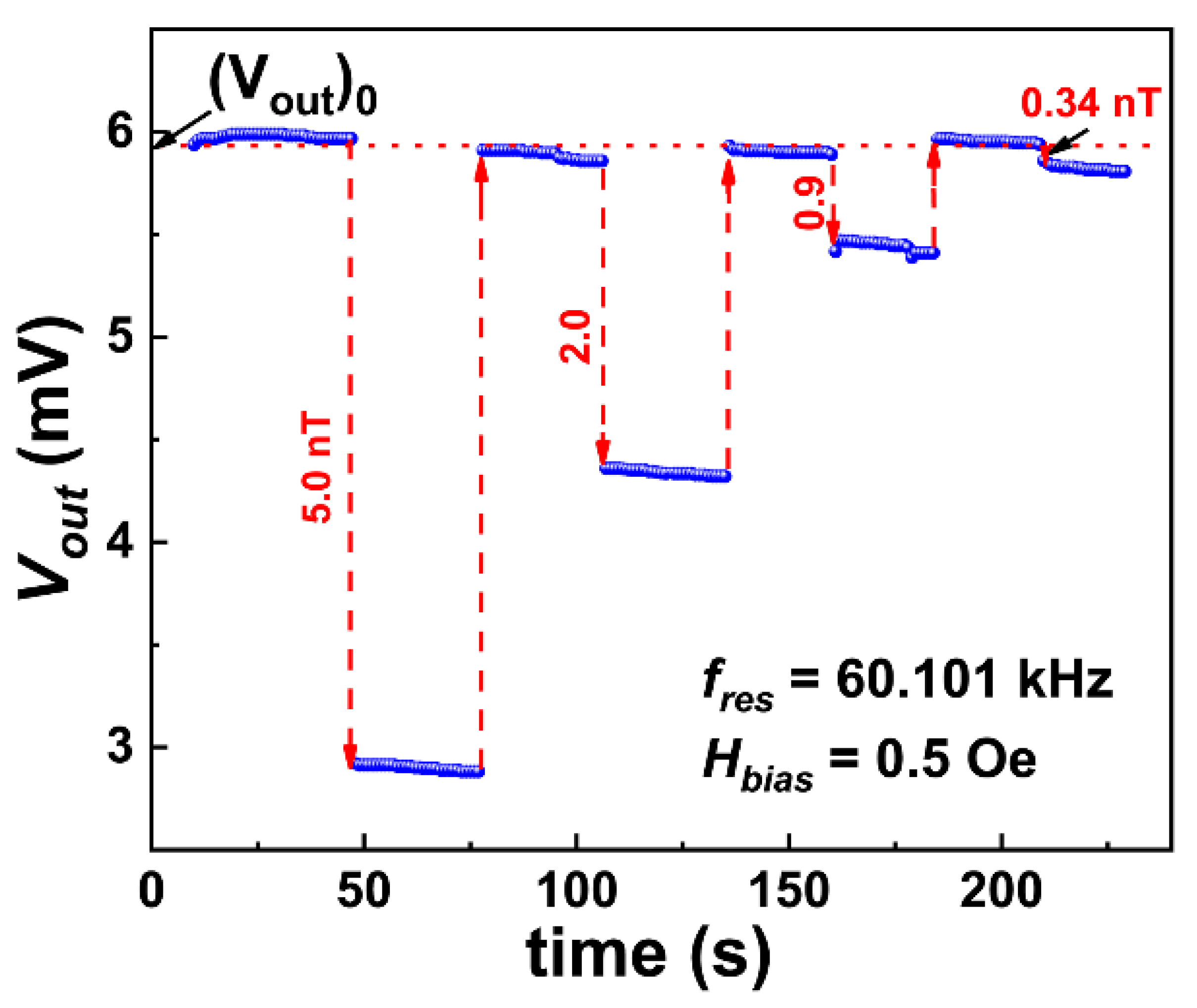
2.1. AC Field Resolution at
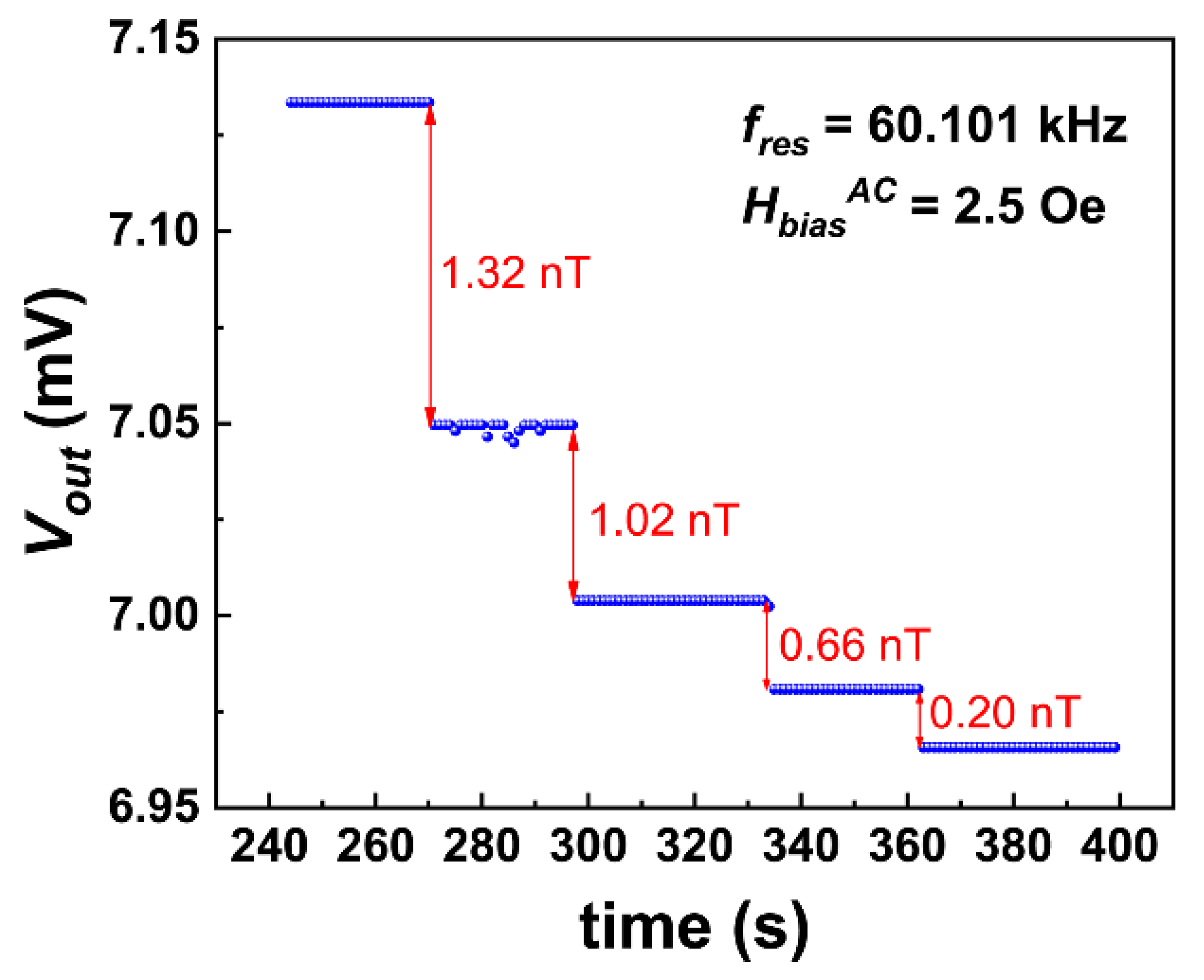
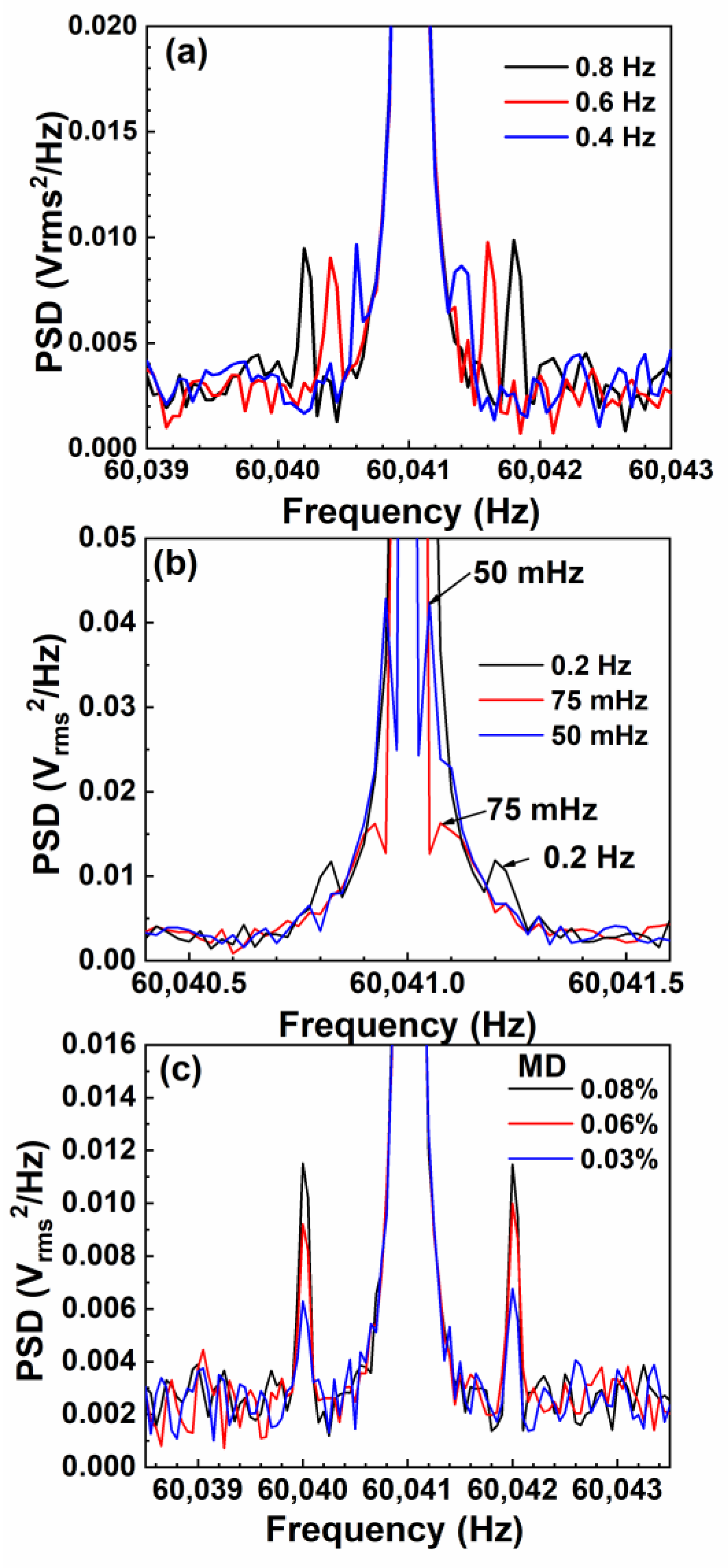
2.2. AC Field Resolution at Ultralow-Frequency
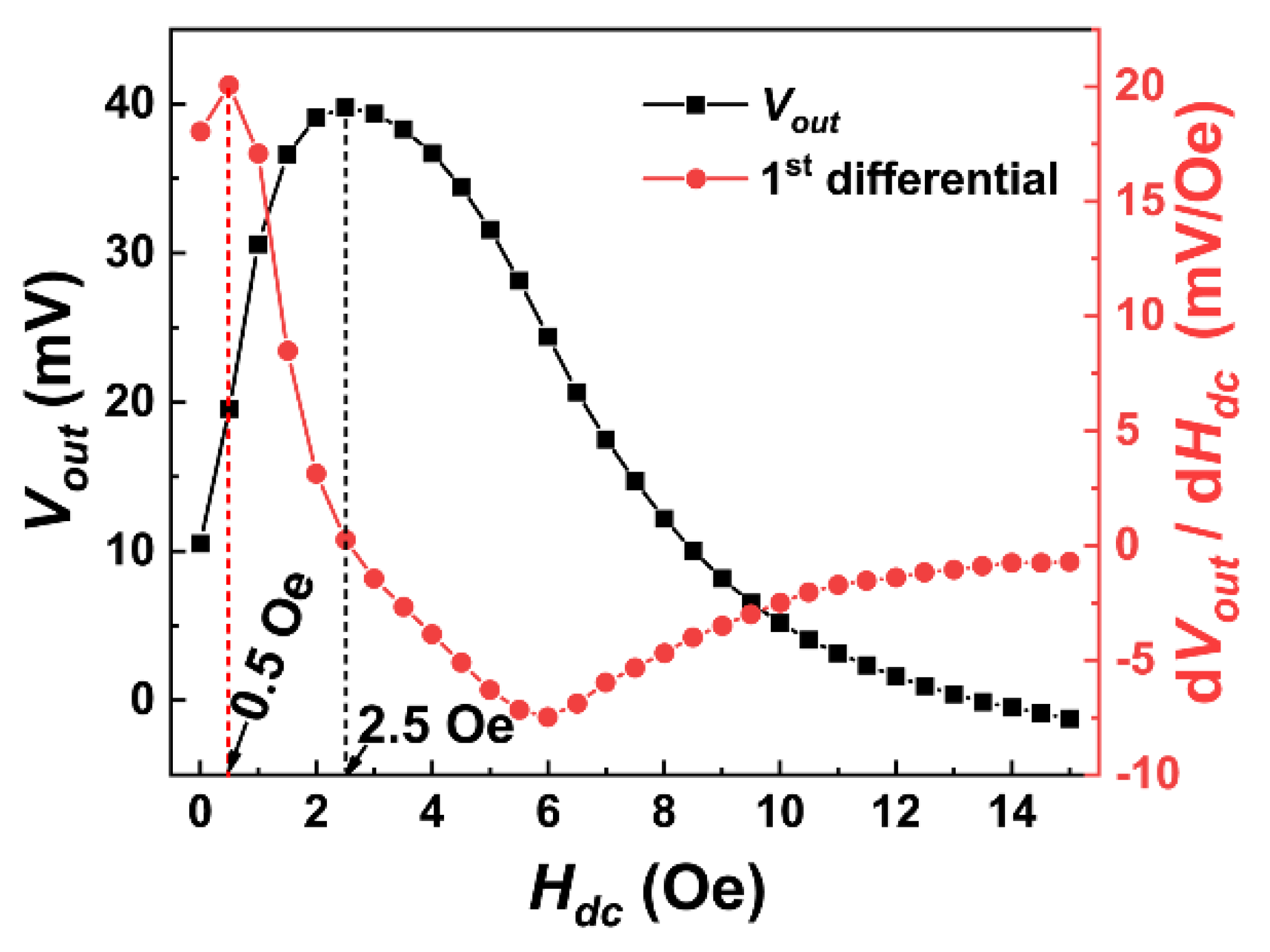
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clausi, D.; Gradin, H.; Braun, S.; Peirs, J.; Stemme, G.; Reynaerts, D.; van der Wijingaart, W. Robust actuation of silicon MEMS using SMA wires integrated at wafer-level by nickel electroplating. Sens. Actuators A Phys. 2013, 189, 108–116. [Google Scholar] [CrossRef]
- Lee, H.-S.; Cho, C.; Chang, S.-P. Effect of SmFe and TbFe film thickness on magnetostriction for MEMS devices. J. Mater. Sci. 2006, 42, 384–388. [Google Scholar] [CrossRef]
- Liang, X.; Dong, C.; Chen, H.; Wang, J.; Wei, Y.; Zaeimbashi, M.; He, Y.; Matyushov, A.; Sun, C.; Sun, N. A review of thin-film magnetoelastic materials for magnetoelectric applications. Sensors 2020, 20, 1532–1558. [Google Scholar] [CrossRef] [PubMed]
- Marauska, S.; Jahns, R.; Greve, H.; Quandt, E.; Knöchel, R.; Wagner, B. MEMS magnetic field sensor based on magnetoelectric composites. J. Micromech. Microeng. 2012, 22, 065024–065029. [Google Scholar] [CrossRef]
- Marauska, S.; Jahns, R.; Kirchhof, C.; Claus, M.; Quandt, E.; Knöchel, R.; Wagner, B. Highly sensitive wafer-level packaged MEMS magnetic field sensor based on magnetoelectric composites. Sens. Actuators A Phys. 2013, 189, 321–327. [Google Scholar] [CrossRef]
- Preisner, T.; Klinkenbusch, L.; Bolzmacher, C.; Gerber, A.; Bauer, K.; Quandt, E.; Mathis, W. Numerical modeling of a MEMS actuator considering several magnetic force calculation methods. COMPEL—Int. J. Comput. Math. Electr. Electron. Eng. 2011, 30, 1176–1188. [Google Scholar] [CrossRef]
- Oogane, M.; Fujiwara, K.; Kanno, A.; Nakano, T.; Wagatsuma, H.; Arimoto, T.; Mizukami, S.; Kumagai, S.; Matsuzaki, H.; Nakasato, N.; et al. Sub-pT magnetic field detection by tunnel magneto-resistive sensors. Appl. Phys. Express 2021, 14, 123002–123006. [Google Scholar] [CrossRef]
- Li, J.; Ma, G.; Zhang, S.; Wang, C.; Jin, Z.; Zong, W.; Zhao, G.; Wang, X.; Xu, J.; Cao, D.; et al. AC/DC dual-mode magnetoelectric sensor with high magnetic field resolution and broad operating bandwidth. AIP Adv. 2021, 11, 045015–045021. [Google Scholar] [CrossRef]
- O’Reilly, J.M.; Stamenov, P. SQUID-detected FMR: Resonance in single crystalline and polycrystalline yttrium iron garnet. Rev. Sci. Instrum. 2018, 89, 044701–044711. [Google Scholar] [CrossRef]
- Tavassolizadeh, A.; Rott, K.; Meier, T.; Quandt, E.; Holscher, H.; Reiss, G.; Meyners, D. Tunnel magnetoresistance sensors with magnetostrictive electrodes: Strain sensors. Sensors 2016, 16, 1902–1912. [Google Scholar] [CrossRef]
- Chu, Z.; PourhosseiniAsl, M.; Dong, S. Review of multi-layered magnetoelectric composite materials and devices applications. J. Phys. D Appl. Phys. 2018, 51, 243001–243036. [Google Scholar] [CrossRef]
- Chu, Z.; Shi, H.; PourhosseiniAsl, M.J.; Wu, J.; Shi, W.; Gao, X.; Yuan, X.; Dong, S. A magnetoelectric flux gate: New approach for weak DC magnetic field detection. Sci. Rep. 2017, 7, 8592–8599. [Google Scholar] [CrossRef]
- PourhosseiniAsl, M.J.; Chu, Z.; Gao, X.; Dong, S. A hexagonal-framed magnetoelectric composite for magnetic vector measurement. Appl. Phys. Lett. 2018, 113, 092902–092906. [Google Scholar] [CrossRef]
- Schmid, U.; Giouroudi, I.; Alnassar, M.; Kosel, J.; Sánchez de Rojas Aldavero, J.L.; Leester-Schaedel, M. Fabrication and properties of SmFe2-PZT magnetoelectric thin films. Proc. SPIE—Int. Soc. Opt. Eng. 2013, 8763, 108–117. [Google Scholar]
- Zhai, J.; Dong, S.; Xing, Z.; Li, J.; Viehland, D. Geomagnetic sensor based on giant magnetoelectric effect. Appl. Phys. Lett. 2007, 91, 123513–123516. [Google Scholar] [CrossRef]
- Chu, Z.; Gao, X.; Shi, W.; MohammdJavad, P.; Dong, S. A square-framed ME composite with inherent multiple resonant peaks for broadband magnetoelectric response. Sci. Bull. 2017, 62, 1177–1180. [Google Scholar] [CrossRef]
- Chu, Z.; Annapureddy, V.; PourhosseiniAsl, M.; Palneedi, H.; Ryu, J.; Dong, S. Dual-stimulus magnetoelectric energy harvesting. MRS Bull. 2018, 43, 199–205. [Google Scholar] [CrossRef]
- Röbisch, V.; Salzer, S.; Urs, N.O.; Reermann, J.; Yarar, E.; Piorra, A.; Kirchhof, C.; Lage, E.; Höft, M.; Schmidt, G.U.; et al. Pushing the detection limit of thin film magnetoelectric heterostructures. J. Mater. Res. 2017, 32, 1009–1019. [Google Scholar] [CrossRef]
- Hayes, P.; Jovicevic Klug, M.; Toxvaerd, S.; Durdaut, P.; Schell, V.; Teplyuk, A.; Burdin, D.; Winkler, A.; Weser, R.; Fetisov, Y.; et al. Converse magnetoelectric composite resonator for sensing small magnetic fields. Sci. Rep. 2019, 9, 16355–16364. [Google Scholar] [CrossRef]
- Hoffmann, J.; Hansen, C.; Maetzler, W.; Schmidt, G. A concept for 6D motion sensing with magnetoelectric sensors. Curr. Dir. Biomed. Eng. 2022, 8, 451–454. [Google Scholar] [CrossRef]
- Elzenheimer, E.; Bald, C.; Engelhardt, E.; Hoffmann, J.; Hayes, P.; Arbustini, J.; Bahr, A.; Quandt, E.; Hoft, M.; Schmidt, G. Quantitative evaluation for magnetoelectric sensor systems in biomagnetic diagnostics. Sensors 2022, 22, 5675–5691. [Google Scholar] [CrossRef] [PubMed]
- Baek, G.; Yang, S.C. Effect of the two-dimensional magnetostrictive fillers of CoFe2O4-intercalated graphene oxide sheets in 3-2 type poly(vinylidene fluoride)-based magnetoelectric films. Polymers 2021, 13, 1782–1795. [Google Scholar] [CrossRef] [PubMed]
- Castro, N.; Reis, S.; Silva, M.P.; Correia, V.; Lanceros-Mendez, S.; Martins, P. Development of a contactless DC current sensor with high linearity and sensitivity based on the magnetoelectric effect. Smart Mater. Struct. 2018, 27, 065012–065018. [Google Scholar] [CrossRef]
- Lu, C.; Li, P.; Wen, Y.; Yang, A.; He, W.; Zhang, J. Enhancement of resonant magnetoelectric effect in magnetostrictive/piezoelectric heterostructure by end bonding. Appl. Phys. Lett. 2013, 102, 132410–132413. [Google Scholar] [CrossRef]
- Pandya, S.; Wilbur, J.D.; Bhatia, B.; Damodaran, A.R.; Monachon, C.; Dasgupta, A.; King, W.P.; Dames, C.; Martin, L.W. Direct measurement of pyroelectric and electrocaloric effects in thin films. Phys. Rev. Appl. 2017, 7, 034025–134037. [Google Scholar] [CrossRef]
- Li, M.; Wang, Z.; Wang, Y.; Li, J.; Viehland, D. Giant magnetoelectric effect in self-biased laminates under zero magnetic field. Appl. Phys. Lett. 2013, 102, 082404–082406. [Google Scholar] [CrossRef]
- Bichurin, M.I.; Petrov, V.M.; Srinivasan, G. Theory of low-frequency magnetoelectric coupling in magnetostrictive-piezoelectric bilayers. Phys. Rev. B 2003, 68, 054402–054414. [Google Scholar] [CrossRef]
- Röbisch, V.; Piorra, A.; Lima de Miranda, R.; Quandt, E.; Meyners, D. Frequency-tunable nickel-titanium substrates for magnetoelectric sensors. AIP Adv. 2018, 8, 125320–125326. [Google Scholar] [CrossRef]
- Su, J.; Niekiel, F.; Fichtner, S.; Kirchhof, C.; Meyners, D.; Quandt, E.; Wagner, B.; Lofink, F. Frequency tunable resonant magnetoelectric sensors for the detection of weak magnetic field. J. Micromech. Microeng. 2020, 30, 075009. [Google Scholar] [CrossRef]
- Röbisch, V.; Yarar, E.; Urs, N.O.; Teliban, I.; Knöchel, R.; McCord, J.; Quandt, E.; Meyners, D. Exchange biased magnetoelectric composites for magnetic field sensor application by frequency conversion. J. Appl. Phys. 2015, 117, B513–B517. [Google Scholar] [CrossRef]
- Li, J.; Sun, K.; Jin, Z.; Li, Y.; Zhou, A.; Huang, Y.; Yang, S.; Wang, C.; Xu, J.; Zhao, G.; et al. A working-point perturbation method for the magnetoelectric sensor to measure DC to ultralow-frequency-AC weak magnetic fields simultaneously. AIP Adv. 2021, 11, 065213–065219. [Google Scholar] [CrossRef]
- Jiao, J.; Zhang, H.; Liu, Y.; Fang, C.; Lin, D.; Zhao, X.; Luo, H. Influence of metglas layer on nonlinear magnetoelectric effect for magnetic field detection by frequency modulation. J. Appl. Phys. 2015, 117, 024104–024109. [Google Scholar] [CrossRef]
- Pan, L.; Pan, M.; Hu, J.; Hu, Y.; Che, Y.; Yu, Y.; Wang, N.; Qiu, W.; Li, P.; Peng, J.; et al. Novel magnetic field modulation concept using multiferroic heterostructure for magnetoresistive sensors. Sensors 2020, 20, 1440–1442. [Google Scholar] [CrossRef]
- Ren, S.; Xue, D.; Ji, Y.; Liu, X.; Yang, S.; Ren, X. Low-field-triggered large magnetostriction in iron-palladium strain glass alloys. Phys. Rev. Lett. 2017, 119, 125701–125706. [Google Scholar] [CrossRef]
- Lu, Y.; Cheng, Z.; Chen, J.; Li, W.; Zhang, S. High sensitivity face shear magneto-electric composite array for weak magnetic field sensing. J. Appl. Phys. 2020, 128, 064102–064109. [Google Scholar] [CrossRef]
- Chu, Z.; Dong, C.; Tu, C.; Liang, X.; Chen, H.; Sun, C.; Yu, Z.; Dong, S.; Sun, N.-X. A low-power and high-sensitivity magnetic field sensor based on converse magnetoelectric effect. Appl. Phys. Lett. 2019, 115, 162901–162905. [Google Scholar] [CrossRef]
- Shi, J.; Wu, M.; Hu, W.; Lu, C.; Mu, X.; Zhu, J. A study of high piezomagnetic (Fe-Ga/Fe-Ni) multilayers for magnetoelectric device. J. Alloy. Compd. 2019, 806, 1465–1468. [Google Scholar] [CrossRef]
- Hayes, P.; Schell, V.; Salzer, S.; Burdin, D.; Yarar, E.; Piorra, A.; Knöchel, R.; Fetisov, Y.K.; Quandt, E. Electrically modulated magnetoelectric AlN/FeCoSiB film composites for DC magnetic field sensing. J. Phys. D Appl. Phys. 2018, 51, 116486–116490. [Google Scholar] [CrossRef]
- Zabel, S.; Reermann, J.; Fichtner, S.; Kirchhof, C.; Quandt, E.; Wagner, B.; Schmidt, G.; Faupel, F. Multimode delta-E effect magnetic field sensors with adapted electrodes. Appl. Phys. Lett. 2016, 108, 222401–222404. [Google Scholar] [CrossRef]
- Spetzler, B.; Bald, C.; Durdaut, P.; Reermann, J.; Kirchhof, C.; Teplyuk, A.; Meyners, D.; Quandt, E.; Hoft, M.; Schmidt, G.; et al. Exchange biased delta-E effect enables the detection of low frequency pT magnetic fields with simultaneous localization. Sci. Rep. 2021, 11, 5269–5282. [Google Scholar] [CrossRef]
- Bald, C.; Schmidt, G. Processing chain for localization of magnetoelectric sensors in real time. Sensors 2021, 21, 5675–5691. [Google Scholar] [CrossRef] [PubMed]
- Das, J.; Gao, J.; Xing, Z.; Li, J.F.; Viehland, D. Enhancement in the field sensitivity of magnetoelectric laminate heterostructures. Appl. Phys. Lett. 2009, 95, 092501–092503. [Google Scholar] [CrossRef]
- Lu, C.; Li, P.; Wen, Y.; Yang, A.; Yang, C.; Wang, D.; He, W.; Zhang, J. Magnetoelectric composite metglas/PZT-based current sensor. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Jiang, Z.; Wang, C.; Han, D.; Yao, Z.; Zong, W.; Jin, Z.; Li, S. High-Resolution Magnetoelectric Sensor and Low-Frequency Measurement Using Frequency Up-Conversion Technique. Sensors 2023, 23, 1702. https://doi.org/10.3390/s23031702
Sun K, Jiang Z, Wang C, Han D, Yao Z, Zong W, Jin Z, Li S. High-Resolution Magnetoelectric Sensor and Low-Frequency Measurement Using Frequency Up-Conversion Technique. Sensors. 2023; 23(3):1702. https://doi.org/10.3390/s23031702
Chicago/Turabian StyleSun, Kunyu, Zhihao Jiang, Chengmeng Wang, Dongxuan Han, Zhao Yao, Weihua Zong, Zhejun Jin, and Shandong Li. 2023. "High-Resolution Magnetoelectric Sensor and Low-Frequency Measurement Using Frequency Up-Conversion Technique" Sensors 23, no. 3: 1702. https://doi.org/10.3390/s23031702
APA StyleSun, K., Jiang, Z., Wang, C., Han, D., Yao, Z., Zong, W., Jin, Z., & Li, S. (2023). High-Resolution Magnetoelectric Sensor and Low-Frequency Measurement Using Frequency Up-Conversion Technique. Sensors, 23(3), 1702. https://doi.org/10.3390/s23031702